") CW32電動工具產(chǎn)品開源應(yīng)用
CW32電動工具產(chǎn)品開源應(yīng)用
一、項目介紹
前言
手電鉆是一種常見的便攜式電動工具,它由一個電動馬達和一個可充電電池組成。這個電動馬達通過傳遞旋轉(zhuǎn)動力給機頭上的鉆頭,從而實現(xiàn)鉆孔、螺絲擰緊、切割或打磨等任務(wù)。一般來說,手電鉆通常有這幾個重要的部件:
(1)電動馬達:它是手電鉆的核心部件,負(fù)責(zé)產(chǎn)生動力并驅(qū)動鉆頭旋轉(zhuǎn)。不同型號的手電鉆功率不同。高功率的電動馬達可以提供更大的扭矩和更高的轉(zhuǎn)速,適用于處理堅硬材料或需要更快速度的工作。
(2)鉆頭:鉆頭是安裝在手電鉆機頭上的可更換配件,用于進行鉆孔或切割操作。鉆頭的尺寸和類型根據(jù)不同的工作需求而變化,例如木材鉆頭、金屬鉆頭、混凝土鉆頭等。一些手電鉆還可以配備其他類型的機頭,如螺絲刀頭、砂輪切割頭等。
(3)電池:手電鉆通常使用可充電電池供電,這樣可以使其更加便攜和靈活。電池容量的大小決定了工作時間的長短,較大容量的電池可以提供更長時間的使用。一些手電鉆還支持快速充電功能,在短時間內(nèi)充滿電池以提高工作效率。
手柄和握把:手電鉆通常具有一個手柄和一個握把,使操作更加穩(wěn)定和舒適。手柄是保持平衡和穩(wěn)定的主要手部支撐,而握把則用于按下觸發(fā)器按鈕和控制手電鉆的方向。
(4)手電鉆的設(shè)計和功能使其成為許多家庭維修、裝飾和建筑工作中不可或缺的工具。它的便攜性、靈活性和易于使用使得用戶可以在各種材料上進行精確的鉆孔和切割操作。
2.CW32手電鉆驅(qū)動板介紹
1.2.1簡介
在本項目中,我們使用CW32手電鉆驅(qū)動板驅(qū)動手電鉆的無刷電機,電池使用18V電池組。建議功率100~200W;該驅(qū)動板具有欠壓保護、過壓保護、過流保護、堵轉(zhuǎn)保護、電量檢測、正反轉(zhuǎn)切換,剎車等功能。可廣泛應(yīng)用于各類無刷電機的控制。
1.2.2項目組成
(1)CW32主控芯片:
控制器的選擇對于整個項目來說特別重要。好的控制器能產(chǎn)生事半功倍的效果,這是整個項目的大腦,它負(fù)責(zé)控制電機的運行和參數(shù)調(diào)節(jié)。而CW32主控芯片的高性能和低功耗的特點,完全能勝任整個項目的要求。
(2)無刷電機:
無刷電機是項目的核心部分,相比傳統(tǒng)的有刷直流電機,它壽命更長、穩(wěn)定性更好、效率更高,能產(chǎn)生的功率更大。
(3)硬件電路:
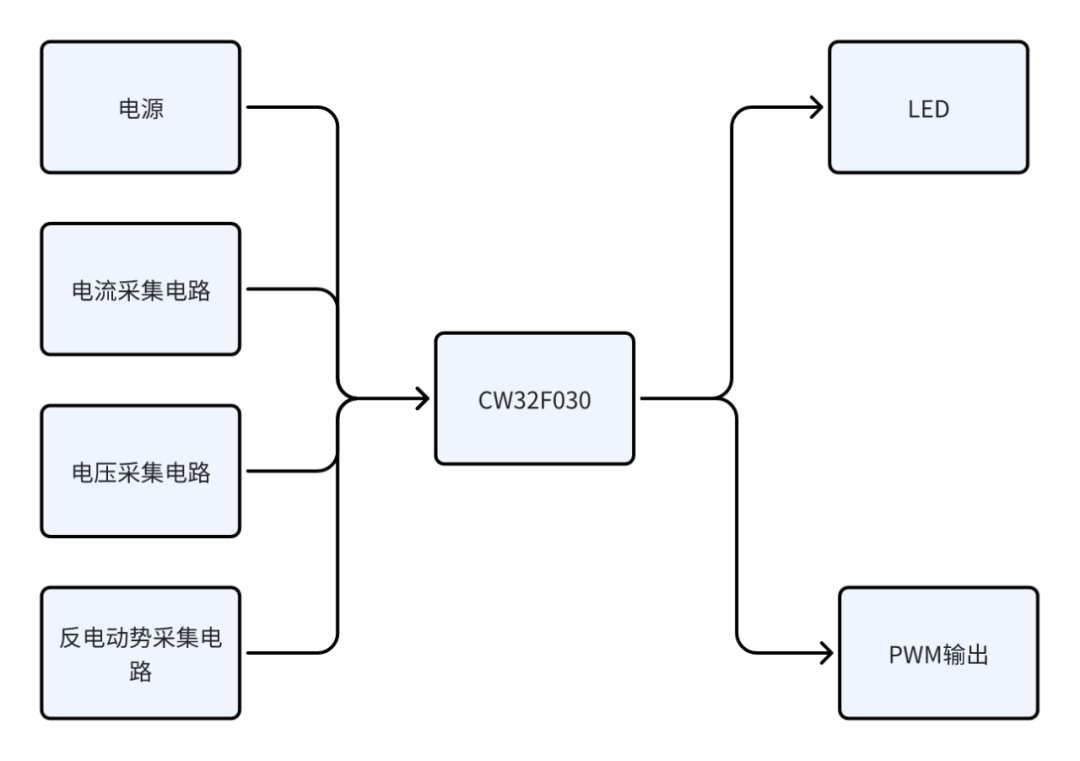
包含控制電路,電流采集電路,母線電壓采集電路,反電動勢采集電路,電源電路。
(4)軟件編寫:
包含電機驅(qū)動代碼,高壓,低壓保護。電流保護,速度異常保護,空載保護、電量檢測、正反轉(zhuǎn)切換,剎車等。
二、電路設(shè)計說明
CW32手電鉆驅(qū)動板硬件設(shè)計包含3個部分:無刷驅(qū)動電路,電源控制電路,單片機及外設(shè)。
2.1 無刷驅(qū)動部分
無刷電機的驅(qū)動又分為反電動勢檢測、電流采集、電源電壓采集,和MOS驅(qū)動電路。
2.1.1 反電動勢檢測
根據(jù)法拉第電磁感應(yīng)定律和楞次定律,轉(zhuǎn)子旋轉(zhuǎn)的時候會在定子繞組中產(chǎn)生感應(yīng)電勢,該感應(yīng)電勢的方向與繞組的電壓相反,極性與勵磁電壓相反,故一般稱為反電動勢或反電勢。
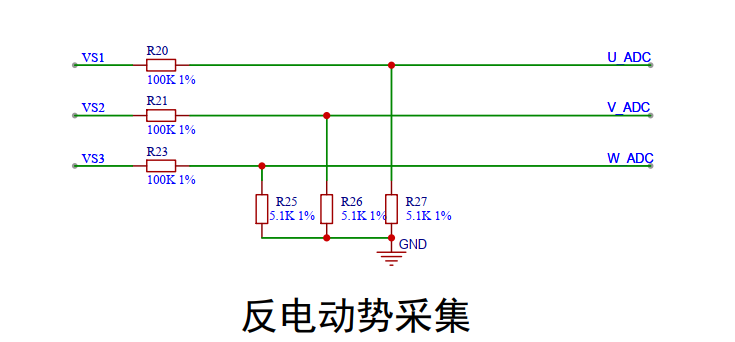
本次使用的反電動勢采樣電路如下,一段接電機的三個相線,另外一端接單片機的三個ADC輸入引腳,中間使用電阻對反電動勢的電壓進行分壓。
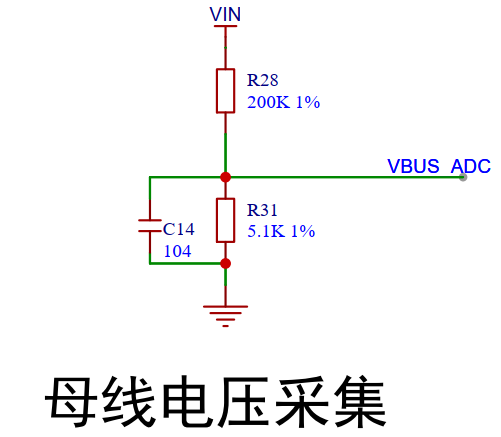
2.1.2 電源電壓采集
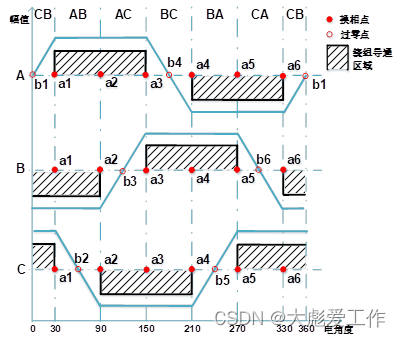
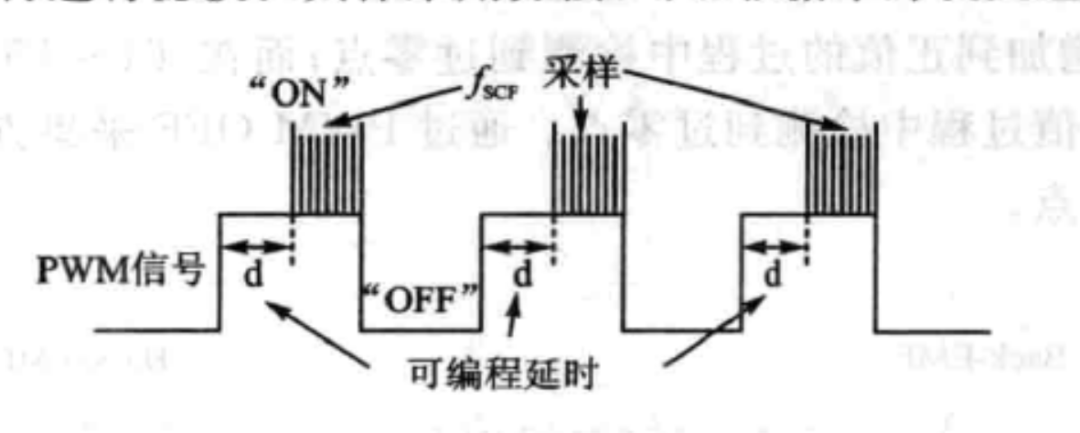
在無刷電機運轉(zhuǎn)過程中,需要在每個控制周期將母線電壓與懸空相的端電壓進行比較,從而獲得反電動勢過零點,在檢測到反電動勢過零之后,延時30°電角度即可進行換相操作。在PWM的關(guān)斷時間內(nèi)采集時,此時的理論的中性點電壓為0V;在PWM的開通時間內(nèi)采集時,此時理論的母線電壓為電源電壓的一半。
由于在TON時刻采樣時需要母線電壓的一半與反電動勢進行比較,以確定零點的位置,所以在電路設(shè)計中,我們將直接將電源電壓采集電路的分壓電阻設(shè)置為200k和5.1k,為上述的反電動勢采集電路的分壓比的二分之一,這樣ADC采集出來的值就不再需要多余的運算,減少了MCU的負(fù)擔(dān)
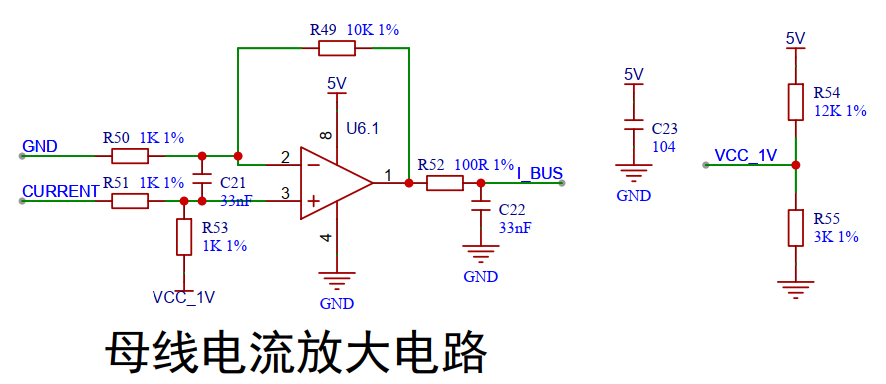
2.1.3 電流采集
本項目中使用運放對采樣電阻上的電壓進行放大,偏置電壓為1V左右,放大倍率為11倍。
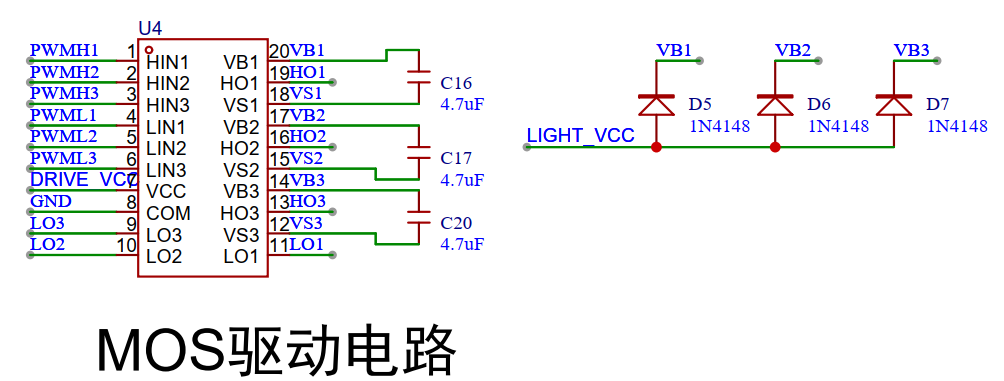
2.1.4 MOS驅(qū)動電路
本項目中柵極MOS的驅(qū)動芯片使用的是FD6288。
FD6288T&Q 是一款集成了三個獨立的半橋柵極驅(qū)動集成電路芯片,專為高壓、高速驅(qū)動 MOSFET 設(shè)計,可在高達+250V 電壓下工作。
FD6288T&Q 內(nèi)置 VCC/VBS 欠壓(UVLO)保護功能,防止功率管在過低的電壓下工作。FD6288T&Q 內(nèi)置直通防止和死區(qū)時間,防止被驅(qū)動的高低側(cè) MOSFET 直通,有效保護功率器件。
FD6288T&Q 內(nèi)置輸入信號濾波,防止輸入噪聲干擾。
2.2 電源控制電路
2.2.1 上電邏輯
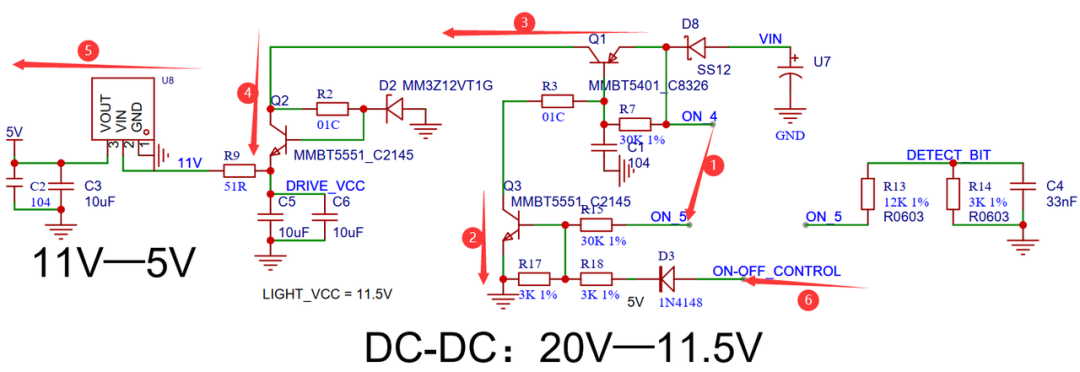
當(dāng)手電鉆上的滑塊按下時,上圖中的NO_4和NO_5會連在一起,VIN將通過二極管和限流電阻流經(jīng)三極管的基極,最后返回電源負(fù)極。
Q3三極管基極正偏,三極管導(dǎo)通。
Q1三極管基極接地,三極管導(dǎo)通,
VIN經(jīng)過穩(wěn)壓二極管后電壓降為11.5V左右
經(jīng)過一個LDO,11.5V的電壓被穩(wěn)到了5V,用于給單片機供電。
當(dāng)單片機得電后,會將ON-OFF_CONTROL引腳拉高,使Q3三極管一直處于開通狀態(tài),整個電源部分完成自鎖。
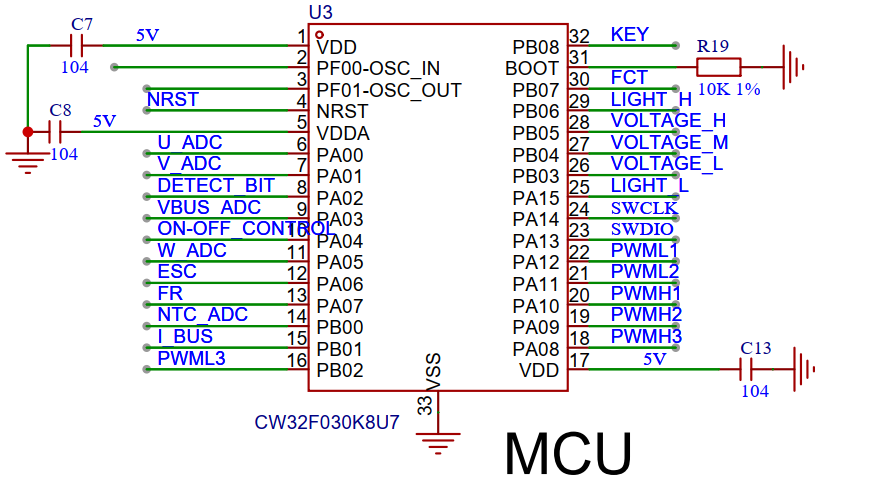
2.3 單片機及外設(shè)
本項目使用的是CW32F030系列的MCU,其采用先進的處理器架構(gòu)和高頻率運行的CPU,具備較高的計算能力和響應(yīng)速度。它可以處理復(fù)雜的算法和任務(wù),并且在實時性要求較高的應(yīng)用中有良好的性能表現(xiàn)。并且CW32通過優(yōu)化的電源管理技術(shù)和低功耗設(shè)計,可以在工作時保持較低的功耗。CW32是一種廣泛應(yīng)用的單片機,具有龐大的開發(fā)社區(qū)和資源支持。開發(fā)者能夠方便地獲取到豐富的官方文檔、軟件開發(fā)工具和例程等,以及來自其他開發(fā)者的經(jīng)驗分享和技術(shù)支持。
2.3.1 CW32單片機核心系統(tǒng)
因為本項目不需要用到高精度時鐘和低速晶振進行長時間計時,因此則省略這部分電路。
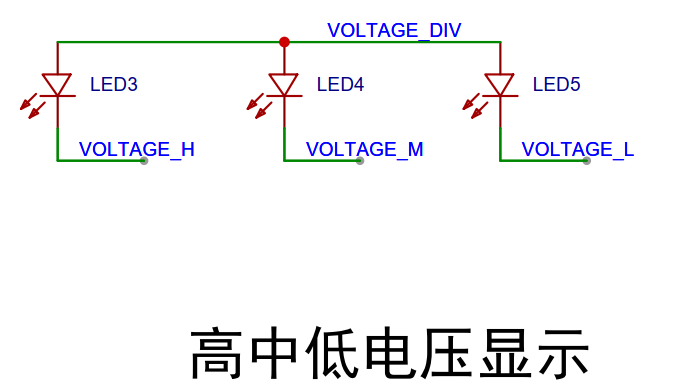
2.3.2 指示燈
在電路板上,有三顆LED用于指示當(dāng)前電池電量。三顆LED與MCU的連接均為灌電流模式
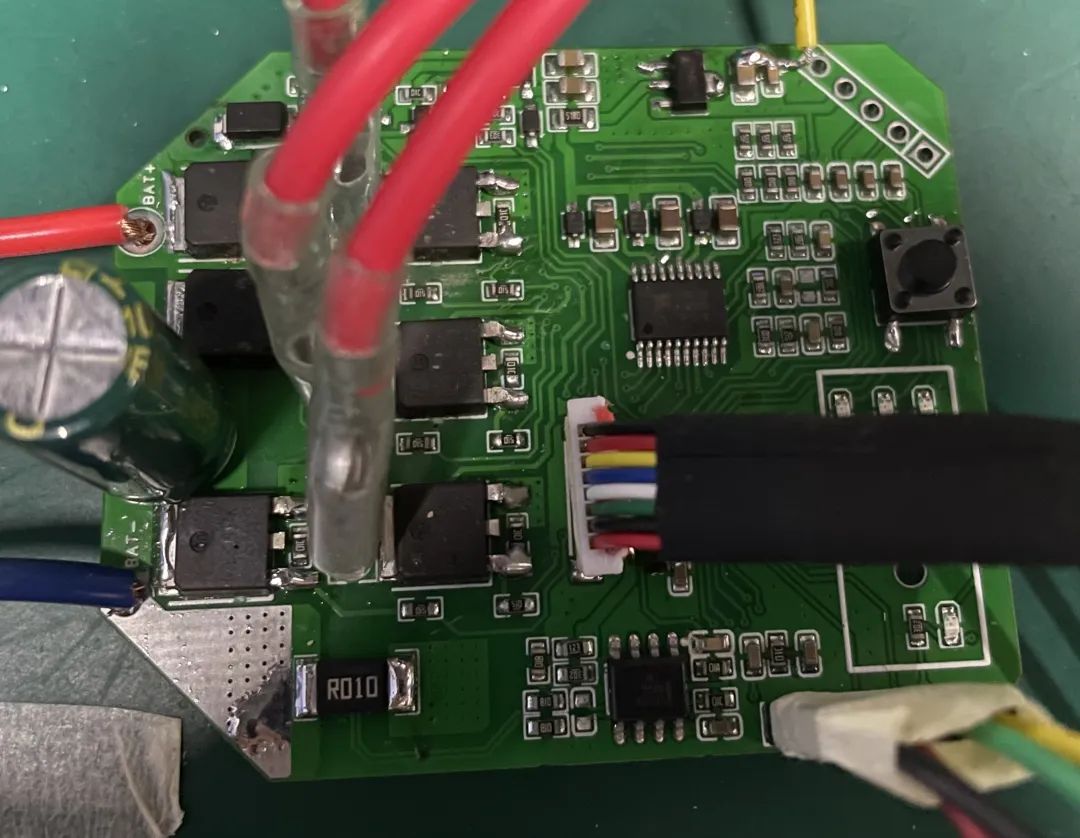
2.4 PCB實物圖
三、程序編寫說明
直流無刷電機由于定子繞組的反電動勢與電機的轉(zhuǎn)速成正比,所以電機在靜止時反電動勢為零或低速時反電動勢很小,此時無法根據(jù)反電動勢信號確定轉(zhuǎn)子磁極的位置。因此,反電動勢法需要采用特殊啟動技術(shù),從靜止開始加速,直至轉(zhuǎn)速足夠大。通過反電勢能檢測到過零時,再切換至直流無刷電機運行狀態(tài)。這個過程稱為“三段式”啟動,主要包括轉(zhuǎn)子預(yù)定位、加速和運行狀態(tài)切換三個階段。這樣既可以使電機轉(zhuǎn)向可控,又可以保證電機達到一定轉(zhuǎn)速后再進行切換,保證了啟動的可靠性。
電機轉(zhuǎn)子預(yù)定位
若要保證直流無刷電機能夠正常啟動,首先要確定轉(zhuǎn)子在靜止時的位置。
在小型輕載條件下,對于具有梯形反電勢波形的直流無刷電機來說,一般采用磁制動轉(zhuǎn)子定位方式。系統(tǒng)啟動時,任意給定一組觸發(fā)脈沖,在氣隙中形成一個幅值恒定、方向不變的磁通。只要保證其幅值足夠大,那么這一磁通就能在一定時間內(nèi)將電機轉(zhuǎn)子強行定位在這個方向上。
在應(yīng)用中,可以在任意一組繞組上通電一定時間,其中預(yù)定位的PWM占空比和預(yù)定位時間的長短設(shè)定值可由具體電機特性和負(fù)載決定,在實際應(yīng)用中調(diào)試而得。
在預(yù)定位成功后,轉(zhuǎn)子在啟動前可達到預(yù)定的位置,為電機啟動做好準(zhǔn)備。
電機的外同步加速
確定了電機轉(zhuǎn)子的初始位置后,由于此時定子繞組中的反電動勢仍為零,所以須人為改變電機的外施電壓和換相信號,使電機由靜止逐步加速運動。這一過程稱為外同步加速。對于不同的外施電壓調(diào)整方法和換相信號調(diào)整方法,外同步加速可劃分為三類:
換相信號頻率不變,逐步增大外施電壓使電機加速,稱為恒頻升壓法。
保持外施電壓不變,逐漸增高換相信號的頻率,使電機逐步加速,稱為恒壓升頻法。
在逐步增大外施電壓的同時,增高換相的頻率,稱為升頻升壓法。
各個方法都有其優(yōu)點和缺點。如升頻升壓法是人為地給電機施加一個由低頻到高頻不斷加速的他控同步切換信號,而且電壓也在不斷地增加。通過調(diào)整電機換相頻率,即可調(diào)整電機啟動的速度。調(diào)整方法比較簡單。但是這個過程較難實現(xiàn)。切換信號的頻率的選擇要根據(jù)電機的極對數(shù)和其他參數(shù)來確定。太低,電機無法加速;太高,電機轉(zhuǎn)速達不到,會有噪聲甚至無法啟動,算法比較困難。
無論哪種方法,該過程都是在未檢測到反電動勢信號時進行。因此對于控制系統(tǒng)來說此段電機控制是盲區(qū)。參數(shù)在調(diào)試好的時候,可以快速切換至正常運行狀態(tài);而參數(shù)不理想時,電流可能不穩(wěn)甚至電機會抖動。因此,在應(yīng)用中,應(yīng)根據(jù)電機及負(fù)載特性設(shè)定合理的升速曲線,并在盡可能短的時間內(nèi)完成切換。
電機運行狀態(tài)的轉(zhuǎn)換
當(dāng)電機通過外同步加速到一定的轉(zhuǎn)速,反電勢信號可以準(zhǔn)確檢測時,即可由外同步向自同步切換。可以通過試驗觀察反電勢信號能夠被準(zhǔn)確檢測的轉(zhuǎn)速。在進行切換有兩種方法:一種是測速模塊可以測出電機的轉(zhuǎn)速,當(dāng)達到這一轉(zhuǎn)速時即可進行切換;另一種,通過試驗檢測出達到預(yù)定切換轉(zhuǎn)速的時間,通過軟件定時器設(shè)置切換時間。
這一步是關(guān)鍵也是比較難實現(xiàn)的一步。有時軟件或者硬件設(shè)計的不合理都可能導(dǎo)致啟動失敗。通常是采用估算的方式來選擇切換速度。
通過上面的分析可知,無位置傳感器直流無刷電機控制系統(tǒng)的難點就是加速及切換階段。當(dāng)電機順利啟動后,就可以對電機進行調(diào)速操作。其中,無位置傳感器直流無刷電機和有位置傳感器直流無刷電機調(diào)速原理一致。但,由于無感三段式啟動過程,轉(zhuǎn)子位置檢測無效。因此,對電機進行的速度PID閉環(huán)控制,須在電機啟動順利完成后進行。
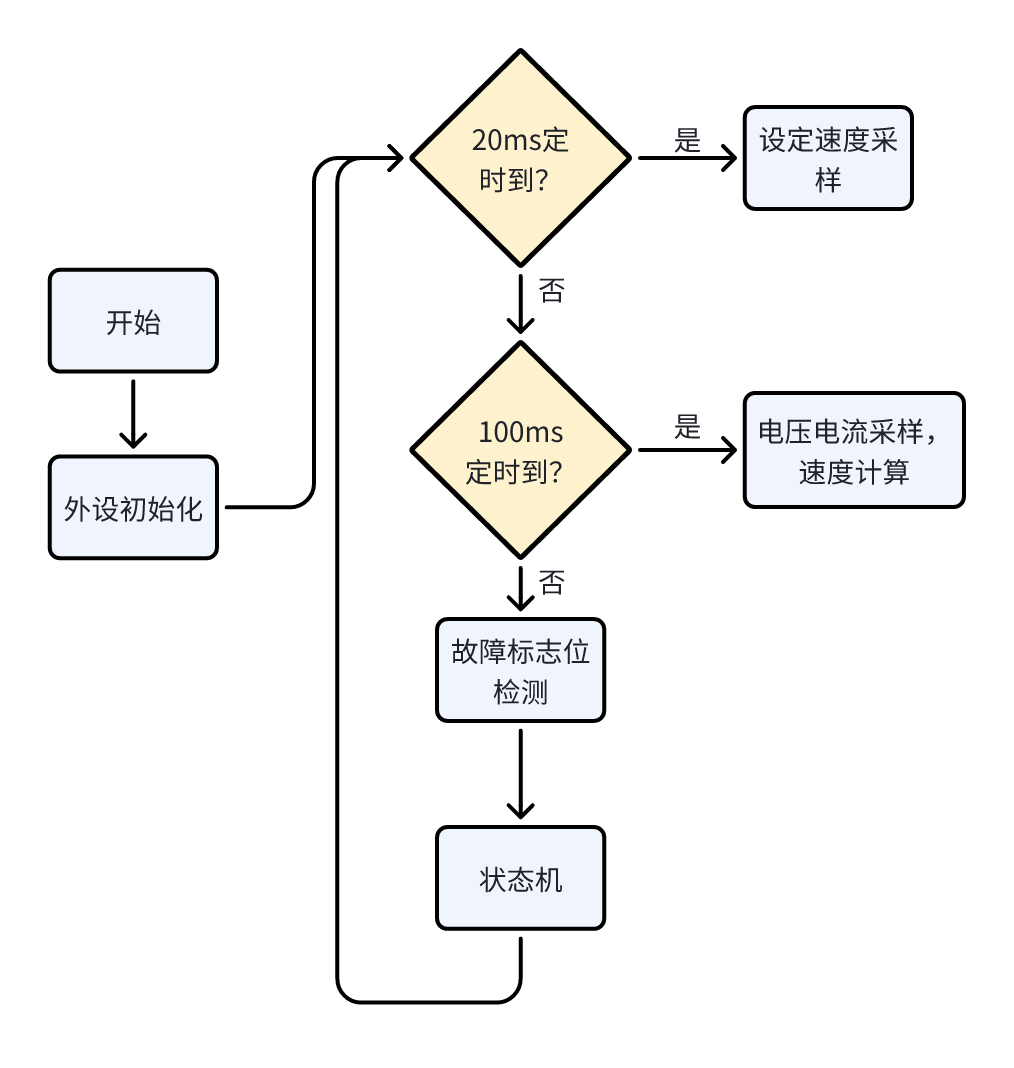
本項目的程序框圖如下:在程序上電后,首先進行各種外設(shè)的初始化,完成后進入while循環(huán)里輪詢執(zhí)行代碼。
審核編輯:劉清
-
控制器
+關(guān)注
關(guān)注
112文章
16361瀏覽量
178030 -
電源電壓
+關(guān)注
關(guān)注
2文章
989瀏覽量
23984 -
驅(qū)動電路
+關(guān)注
關(guān)注
153文章
1530瀏覽量
108519 -
電源控制
+關(guān)注
關(guān)注
2文章
138瀏覽量
26600 -
無刷電機
+關(guān)注
關(guān)注
57文章
844瀏覽量
45841
原文標(biāo)題:【產(chǎn)品應(yīng)用】CW32電動工具產(chǎn)品開源
文章出處:【微信號:武漢芯源半導(dǎo)體,微信公眾號:武漢芯源半導(dǎo)體】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
基于CW32L010單片機的低成本電動工具方案

貼片電解電容,實現(xiàn)了電動工具的雙重絕緣dglangxun
電動工具常見故障以及老化技術(shù)
基于電源模塊的電動工具設(shè)計
電動工具中高邊驅(qū)動方案
有刷電動工具和無刷電動工具的區(qū)別
如何解決電動工具散熱問題
節(jié)能減排為什么說不能忽視電動工具?

探討國內(nèi)電動工具控制器技術(shù)現(xiàn)狀與發(fā)展趨勢


國內(nèi)外電動工具方案商將攜最新產(chǎn)品匯聚蘇州

Linearin ▏先積產(chǎn)品在電動工具的應(yīng)用

使用無刷電機的電動工具有什么好處?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論