 車載以太網的基礎知識
車載以太網的基礎知識
車載網絡由于自動駕駛和連接技術的飛速發展而快速發展,推動著汽車行業向前發展。需要支持更多功能以提高效率、安全性和駕駛體驗。因此,對數據帶寬和電纜數量的要求越來越高,以及復雜性、靈活性和成本效益等因素也變得更加具有挑戰性。
要實現自動駕駛,必須將多種技術很好地集成到車內。這包括長程雷達、短/中程毫米波雷達、激光雷達、攝像頭、超聲波傳感器和 GPS,它們都以不同的數據速率和通信協議運行。因此,這些分散的網絡正越來越多地演變為集中的網絡架構。
大多數的這些新功能和應用都需要依賴昂貴且復雜的布線和需要較大帶寬的電子 設備。這將會是增加汽車價格和重量的關鍵因素。為了解決這個問題,新制定的BroadR-Reach100 Mbit/s汽車以太網規范試試圖優化車內布線,在單根非屏蔽雙絞銅線上基于100Mbit/s運行。
BroadR-Reach 100 Mbit / s汽車以太網標準旨在解決這個問題 - 通過允許多個車載系統同時通過非屏蔽單根雙絞線電纜訪問信息,降低連接成本和布線重量。
OPEN Alliance BroadR-Reach(OABR)規范定義了一個單一的雙絞線100Mbit/s接口。OABR將降低車載網絡的成本和重量,因為只使用一根線。信號均在雙絞線上發送。
雙絞線是一種由兩根相互絕緣的導線絞合而成的電纜。它是一種常見的傳輸介質,用于電信、計算機網絡和其他應用。雙絞線的兩根導線通常由銅制成,并包裹在絕緣層中。兩根導線絞合在一起,以減少外部電磁干擾。
車載以太網是新的物理層標準,使用以太網標準作為車內網絡技術。它提供高抗干擾性、減少了布線和高速數據速率。高抗干擾性和減少了布線是將以太網引入車內的兩大創新。如果沒有高抗干擾性能力,我們熟悉的標準以太網,100Base-T和100Base-TX,將無法承受車內惡劣的電磁環境。
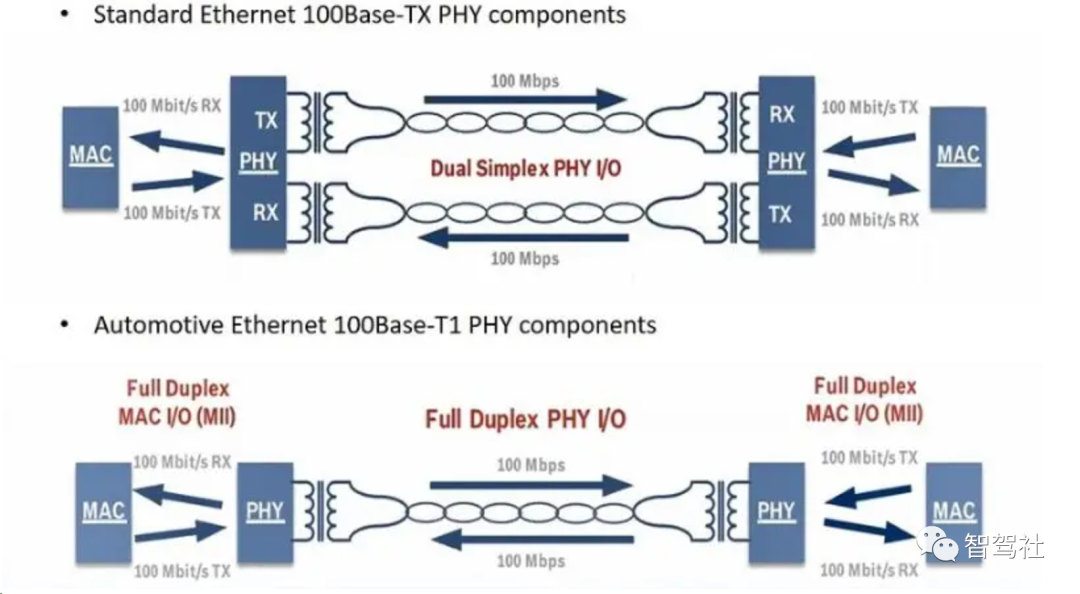
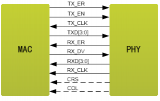
圖1. 雙工 PHY 輸入輸出 (I/O) 與全雙工 PHY 輸入輸出 (I/O)
PHY 層是物理層 (PHY),它定義了數據在物理介質上傳輸的方式。PHY 層有兩種 I/O 模式:雙工和全雙工。
雙工:在雙工模式下,每個節點只能在一個時間內發送或接收數據。這意味著,如果一個節點正在發送數據,那么另一個節點必須等待才能發送數據。雙工模式通常用于低速鏈路,例如以太網 10Base-T 和以太網 100Base-TX。
全雙工:在全雙工模式下,每個節點都可以在任何時候同時發送和接收數據。這意味著,兩個節點可以同時交換數據,從而提高數據吞吐量。全雙工模式通常用于高速鏈路,例如以太網 1000Base-T 和以太網 10GBase-T。
表1雙工 PHY I/O 和全雙工 PHY I/O 的比較

圖 1 顯示了物理 (PHY) 層的高級概述。標準以太網 100Base-Tx 是具有 2 個雙絞線的雙半雙工配置。相比之下,車載以太網 100Base-T1 是一種全雙工鏈路,具有單個雙絞線,可以雙向傳輸 100 兆位每秒 (Mbps)。這意味著節點之間理論上可以進行 200 Mbps 的通信聚合。在 1000Base-T1 上可以看到同樣的改進。
以太網速度與以比特每秒或千比特每秒速度運行的 CAN、CAN-FD、LIN 和 FlexRay 進行比較,就會發現巨大的差異。這清楚地表明了汽車以太網的優勢,它可以滿足自動駕駛汽車 (AV) 對更大帶寬的需求。
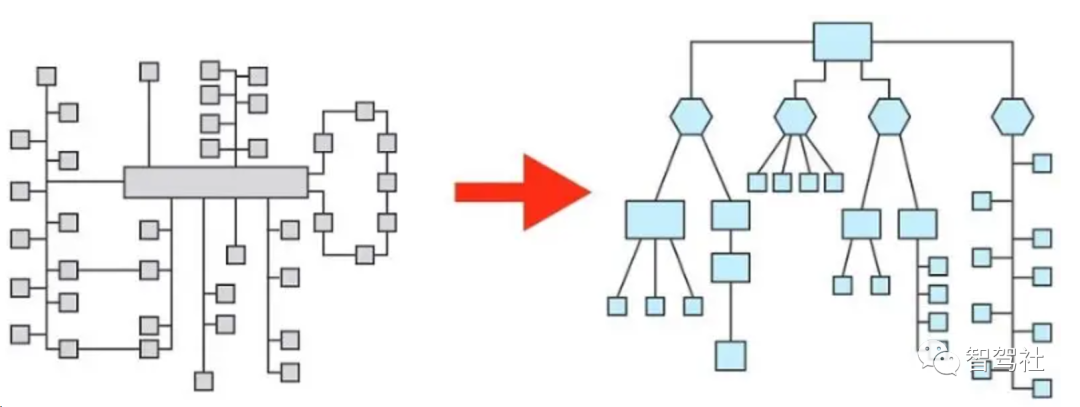
圖2. 異構網絡到分層同構網絡
圖 2 的左側圖顯示了異構網絡。網絡的右側可能是環形拓撲的 MOST 網絡。網絡的左側可能是 CAN 或 CAN-FD 總線,其中多個節點可以直接訪問總線。這被認為是經典的拓撲結構,其中只有單級通信。子網之間的所有通信都可以由中央網關直接管理。另一方面,圖 2 的右側圖是層次同構網絡,其中經典技術如 CAN、CAN-FD、LIN 和 FlexRay 在最低層。網絡的第二層(由六邊形表示)是 Ethernet 和經典技術之間的中間網關。頂層的矩形可以是交換機或僅具有 Ethernet 端口的單元。這是為了使通信能夠以更響應的方式與所有網絡進行通信。
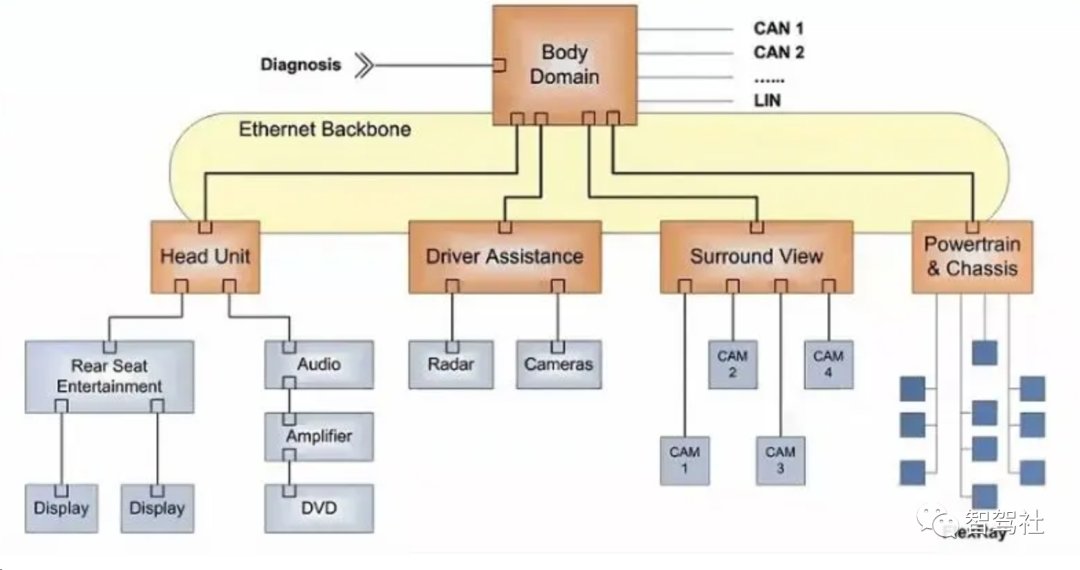
圖 3. 以太網作為骨干
圖 3 說明了分層同構網絡的應用。我們有車載信息娛樂系統、駕駛員輔助系統、環繞視圖和動力總成和底盤,域間網關將經典技術轉換為以太網。這些不同技術之間的翻譯,也稱為以太網骨干,允許子單元及其中間網關連接到支持以太網的中央網關。以太網千兆位每秒的實現愿景已經成為現實,許多原始設備制造商都使用這種架構作為其以太網骨干。
汽車網絡架構的演變:網絡架構將需要成為特定于模型的,因為低端和高端車輛都有不同的需求。目前,汽車以太網不會取代所有聯網需求,而是將在很長一段時間內與經典總線網絡共存。這是因為成本是阻礙汽車以太網更廣泛采用的一個關鍵障礙。像 CAN、CAN-FD 和 LIN 這樣的經典技術已經成熟且具有成本效益。它們將仍然與特定應用領域相關,尤其是那些以低成本和低帶寬為關鍵設計規范的領域。
由于汽車以太網高性能、可靠且具有成本效益的網絡技術,在汽車行業中日益得到采用。它相對于傳統的汽車網絡技術,如 CAN 和 LIN,具有以下優勢:
更高的帶寬:汽車以太網可以支持高達 10 Gbps 的數據速率,這比 CAN 和 LIN 的帶寬要高得多。這允許傳輸大量數據,例如高分辨率圖像和視頻,這對于高級駕駛員輔助系統 (ADAS) 和自動駕駛汽車 (AV) 至關重要。
更低的延遲:汽車以太網的延遲非常低,這是數據包從一個節點傳輸到另一個節點所需的時間。這對于實時應用程序,例如安全氣囊和電子穩定控制 (ESC) 非常重要。
減少布線:汽車以太網使用單根雙絞線,可以是屏蔽或非屏蔽的。這減少了車輛中所需的布線量,從而可以節省重量和空間。
提高靈活性:汽車以太網是一種基于標準的技術,因此易于與其他系統和設備集成。這使其成為比傳統汽車網絡技術更靈活和可擴展的解決方案。
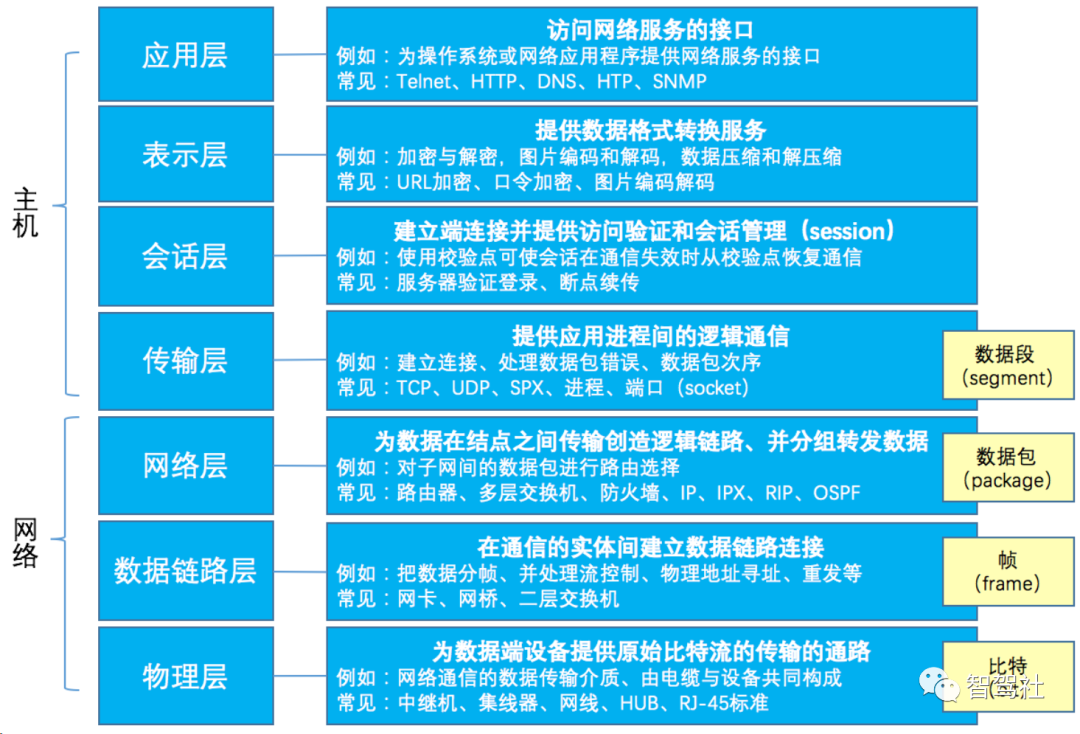
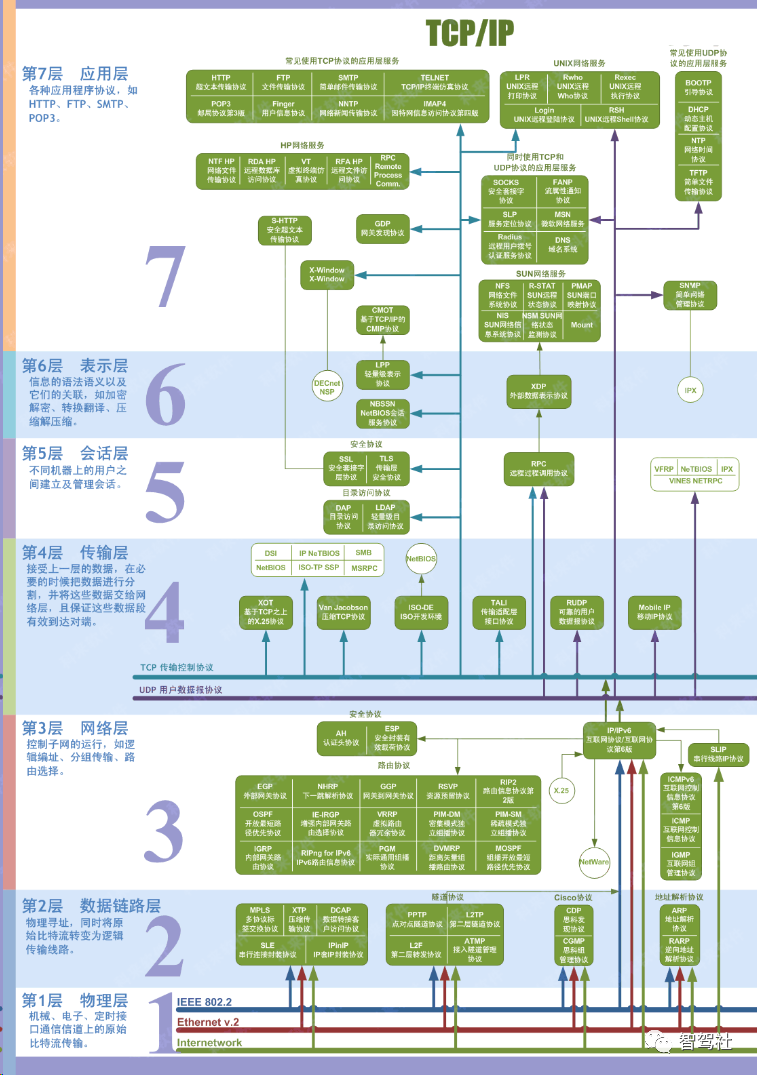
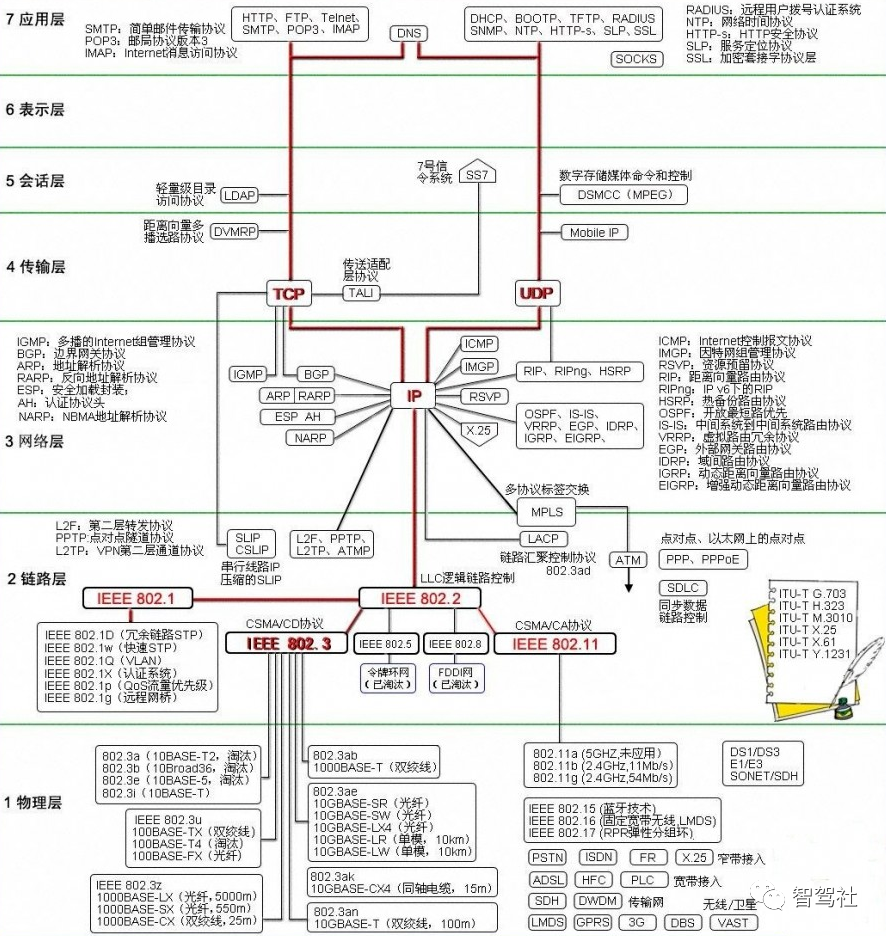
以太網協議棧基于計算機網絡的七層OSI模型,OSI 定義了網絡互連的七層框架(物理層、數據鏈路層、網絡層、傳輸層、會話層、表示層、應用層),即 ISO 開放互連系統參考模型。
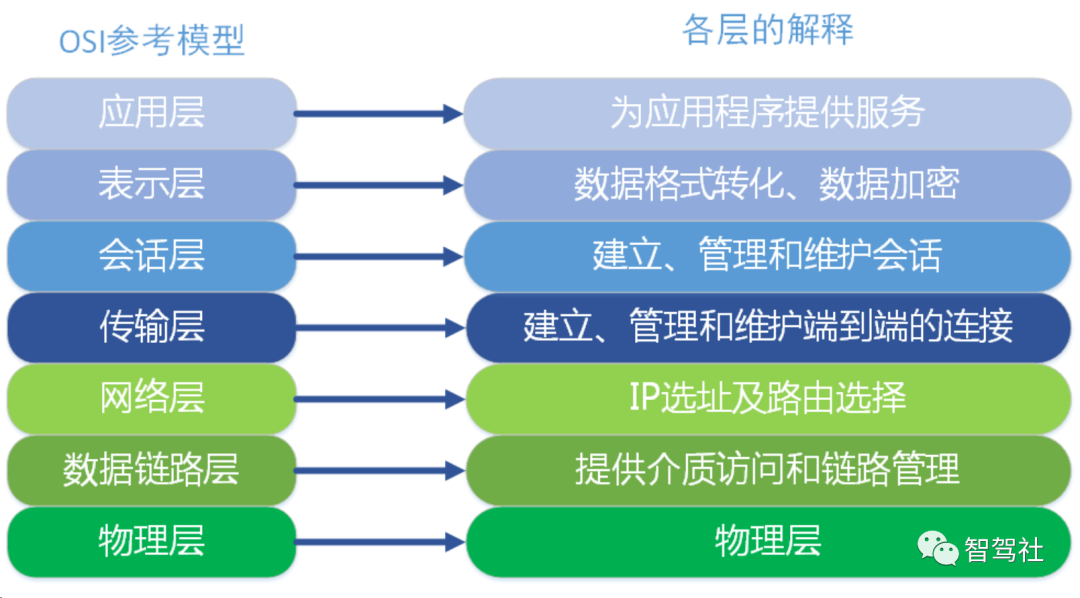
每一層實現各自的功能和協議,并完成與相鄰層的接口通信。OSI 的服務定義詳細說明了各層所提供的服務。某一層的服務就是該層及其下各層的一種能力,它通過接口提供給更高一層。各層所提供的服務與這些服務是怎么實現的無關。
第一層:物理層
物理層負責在設備(例如網絡接口控制器、以太網集線器或網絡交換機)和物理傳輸介質之間傳輸和接收非結構化的原始數據。它將數字比特轉換為電信號、無線信號或光信號。層規范定義了諸如電壓水平、電壓變化的定時、物理數據速率、最大傳輸距離、調制方案、信道訪問方法和物理連接器等特性。這包括引腳布局、電壓、線路阻抗、電纜規格、信號定時和無線設備的頻率。比特率控制是在物理層完成的,并且可能將傳輸模式定義為單工、半雙工和全雙工。物理層的組件可以用網絡拓撲來描述。物理層規范包含在流行的藍牙、以太網和 USB 標準的規范中。一個不太知名的物理層規范的例子是 CAN 標準。
物理層還指定了編碼如何在物理信號(例如電電壓或光脈沖)上發生。例如,1 比特可能在銅線上表示為從 0 伏到 5 伏信號的轉換,而 0 比特可能表示為從 5 伏到 0 伏信號的轉換。因此,在物理層經常發生的常見問題通常與不正確的媒體終止、EMI 或噪聲干擾以及配置錯誤或無法正常工作的 NIC 和集線器有關。
第二層:數據鏈路層:
數據鏈路層提供節點到節點的數據傳輸 - 兩個直接連接的節點之間的鏈路。它檢測并可能糾正物理層可能發生的錯誤。它定義了在兩個物理連接的設備之間建立和終止連接的協議。它還定義了它們之間的流量控制協議。
IEEE 802 將數據鏈路層分為兩個子層:中繼訪問控制 (MAC) 層 - 負責控制網絡中的設備如何獲得對媒介的訪問權限和傳輸數據的權限; 邏輯鏈路控制 (LLC) 層 - 負責識別和封裝網絡層協議,并控制錯誤檢查和幀同步。
IEEE 802 網絡(例如 802.3 以太網、802.11 Wi-Fi 和 802.15.4 Zigbee)的 MAC 和 LLC 層在數據鏈路層運行。
點對點協議 (PPP) 是一個可以在多個不同的物理層(例如同步和異步串行線)上運行的數據鏈路層協議。
ITU-T G.hn 標準通過選擇性重復滑動窗口協議提供誤差校正和流量控制,該標準通過現有的電線(電力線、電話線和同軸電纜)提供高速局域網。安全性,特別是(經過身份驗證的)加密,可以在此層使用 MACsec 應用。
第三層:網絡層:
網絡層提供將數據包從一個連接到“不同網絡”的另一個節點的功能和程序方法。網絡是一種可以連接許多節點的媒介,每個節點都有一個地址,并允許連接到它的節點僅通過提供消息的內容和目標節點的地址來將消息傳輸到連接到它的其他節點,并讓網絡找到將消息傳遞到目標節點的方法,可能會通過中間節點路由它。如果消息太大而無法在這些節點之間的數據鏈路層上傳遞,則網絡可以通過在一個節點將消息拆分成多個片段、獨立發送片段并在另一個節點重新組裝片段來實施消息傳遞。它可能會但并不需要報告傳遞錯誤。
在網絡層的消息傳遞不一定保證是可靠的;網絡層協議可能會提供可靠的消息傳遞,但它并不需要這樣做。
許多層管理協議(定義在管理附件 ISO 7498/4 中的功能)屬于網絡層。這些包括路由協議、多播組管理、網絡層信息和錯誤以及網絡層地址分配。是有效載荷的功能使其屬于網絡層,而不是攜帶它們的協議。
第四層:傳輸層:
傳輸層提供了在源主機和目標主機之間通過網絡從一個應用程序傳輸到另一個應用程序的可變長度數據序列的功能和程序方法,同時保持服務質量功能。傳輸協議可以面向連接或無連接。
這可能需要將大型協議數據單元或長數據流分解為更小的塊,稱為“段”,因為網絡層施加了稱為最大傳輸單元 (MTU) 的最大包大小,該大小取決于所有數據鏈路層在網絡路徑之間的所有數據鏈路層施加的最大包大小。兩個主機。數據段中的數據量必須足夠小,以容納網絡層報頭和傳輸層報頭。例如,對于通過以太網傳輸的數據,MTU 為 1500 字節,TCP 標頭的最小大小為 20 字節,IPv4 標頭的最小大小為 20 字節,因此最大段大小為 1500?(20+20) 字節,或 1460 字節。將數據劃分為段的過程稱為分段;它是傳輸層的可選功能。一些面向連接的傳輸協議,例如 TCP 和 OSI 面向連接的傳輸協議 (COTP),會在接收方執行段的分割和重新組裝;無連接的傳輸協議,例如 UDP 和 OSI 無連接的傳輸協議 (CLTP),通常不會執行。
傳輸層還通過流量控制、錯誤控制和對序列和存在性的確認來控制源主機和目標主機之間給定鏈接的可靠性。一些協議面向狀態和連接。這意味著傳輸層可以跟蹤段并通過確認握手系統重新傳輸那些未能送達的段。傳輸層還會提供成功數據傳輸的確認,并在沒有錯誤發生時發送下一個數據。
傳輸層可以用一個郵局來形象地說明,郵局負責處理郵件和包裹的派送和分類。郵局只檢查郵件的外封以確定其投遞地址。更高級的層可能相當于雙層封套,例如加密表示服務,只有收件人才能閱讀。一般來說,隧道協議是在傳輸層工作的,例如通過 IP 網絡傳輸非 IP 協議,如 IBM 的 SNA 或 Novell 的 IPX,或者使用 IPsec 進行端到端加密。雖然通用路由封裝 (GRE) 可能是網絡層協議,但如果負載的封裝只在端點處進行,GRE 則更接近于傳輸協議,它使用 IP 頭,但包含完整的第 2 層幀或第 3 層包,以傳遞到端點。L2TP 將 PPP 幀封裝在傳輸段中。
盡管沒有根據 OSI 參考模型開發,也不嚴格符合 OSI 對傳輸層的定義,但在 Internet 協議套件中的傳輸控制協議 (TCP) 和用戶數據報協議 (UDP) 通常被歸類為 OSI 中的第 4 層協議。傳輸層安全 (TLS) 也不嚴格符合該模型。它包含傳輸層和表示層的特征。
第五層:會話層:
會話層在兩個或多個計算機之間創建、控制連接并結束連接,稱為“會話”。由于 DNS 和其他名稱解析協議在此部分進行操作,因此會話層的常見功能包括用戶登錄(建立)、名稱查找(管理)和用戶注銷(終止)功能。包括此問題,身份驗證協議也內置于大多數客戶端軟件中,例如 Microsoft 網絡的 FTP 客戶端和 NFS 客戶端。因此,會話層在本地應用程序和遠程應用程序之間建立、管理和終止連接。會話層還提供全雙工、半雙工或單工操作,并建立檢查點、掛起、重新啟動和終止兩個相關數據流之間會話的程序,例如網絡會議應用程序中的音頻流和視頻流。因此,會話層通常在使用遠程過程調用的應用程序環境中顯式實現。
第六層:表示層:
表示層在封裝傳出消息時將數據格式化和翻譯成應用程序層指定的格式,并在向上傳遞協議棧時對傳入消息進行解封裝時可能會反轉。正是出于這個原因,在封裝過程中,傳出消息會轉換為應用程序層指定的格式,而在解封裝過程中,傳入消息的轉換會反轉。
表示層處理協議轉換、數據加密、數據解密、數據壓縮、數據解壓縮、操作系統之間的數據表示不兼容以及圖形命令。表示層將數據轉換為應用程序層接受的形式,以通過網絡發送。由于表示層將數據和圖形轉換為應用程序層的顯示格式,因此表示層有時稱為語法層。出于這個原因,表示層通過抽象語法表示一 (ASN.1) 的基本編碼規則來協商語法結構的傳輸,具有諸如將 EBCDIC 編碼的文本文件轉換為 ASCII 編碼的文件或對象序列化以及其他數據結構與 XML 之間的轉換等功能。
第七層:應用程序層
應用程序層是 OSI 模型中與最終用戶最接近的層,這意味著 OSI 應用程序層和用戶都直接與軟件應用程序交互,該應用程序實現了客戶端和服務器之間通信的組件,例如文件資源管理器和 Microsoft Word。此類應用程序程序除非通過通信功能直接集成到應用程序層,否則不在 OSI 模型的范圍內,例如網絡瀏覽器和電子郵件程序。其他軟件示例包括用于文件和打印機共享的 Microsoft 網絡軟件和用于訪問共享文件資源的 Unix/Linux 網絡文件系統客戶端。
應用程序層功能通常包括通過應用程序層最常見的協議(稱為 HTTP、FTP、SMB/CIFS、TFTP 和 SMTP)來進行文件共享、消息處理和數據庫訪問。在識別通信伙伴時,應用程序層會確定具有要傳輸數據的應用程序的通信伙伴的身份和可用性。應用程序層最重要的區別是應用程序實體和應用程序之間的區別。例如,預訂網站可能有兩個應用程序實體:一個使用 HTTP 與用戶通信,另一個用于遠程數據庫協議來記錄預訂。這兩個協議都沒有與預訂有任何關系。該邏輯位于應用程序本身中。應用程序層無法確定網絡中的資源可用性。
OSI七層模型簡寫

七層模型優點:
把復雜的網絡劃分成為更容易管理的層(將整個龐大而復雜的問題劃分為若干個容易處理的小問題)。
沒有一個廠家能完整的提供整套解決方案和所有的設備,協議,獨立完成各自該做的任務,互不影響,分工明確,上層不關心下層具體細節,分層同樣有益于網絡排錯。
汽車以太網是汽車網絡的未來。它是一種高性能、可靠且具有成本效益的技術,非常適合現代汽車的需求。隨著汽車行業繼續發展 ADAS 和 AV,汽車以太網將發揮越來越重要的作用。
隨著連接性的增強,網絡安全將成為一個至關重要的設計考慮因素。與 CAN 相比,汽車以太網安全性是復雜的,需要專業知識和專用的集中管理。
隨著汽車電子化、智能化的發展,汽車網絡化程度不斷提高,汽車內部的通信需求也越來越多。OSI 模型可以為汽車網絡提供一個統一的框架,幫助汽車制造商和供應商設計和開發汽車網絡。汽車網絡的安全性越來越受到關注。OSI 模型可以為汽車網絡提供安全保障,例如通過身份認證、授權、加密等手段來保護汽車網絡免受攻擊。自動駕駛對汽車網絡提出了更高的要求:OSI 模型可以為自動駕駛提供一個可靠的通信基礎,例如通過 QoS 保障(Quality of Service)來保證數據傳輸的質量。
具體來說,在汽車網絡化方面,OSI 模型可以應用于以下幾個場景:
車內網絡用于連接汽車內部的各個電子設備,例如車載信息娛樂系統、車載導航系統、車載安全系統等。OSI 模型可以為車內網絡提供一個統一的通信協議,幫助汽車制造商和供應商簡化車內網絡的設計和開發。
車聯網用于連接汽車和外部網絡,例如道路基礎設施、云計算等。OSI 模型可以為車聯網提供一個統一的通信框架,幫助汽車制造商和供應商構建安全可靠的車聯網。
在汽車安全方面,OSI 模型可以應用于以下幾個場景:
身份認證:OSI 模型可以使用身份認證協議來驗證汽車網絡中的各個設備的身份,防止未經授權的設備訪問汽車網絡。
授權:OSI 模型可以使用授權協議來控制汽車網絡中的各個設備的訪問權限,防止未經授權的設備訪問敏感數據。
加密:OSI 模型可以使用加密協議來保護汽車網絡中的數據,防止數據被竊取或篡改。
在自動駕駛方面,OSI 模型可以應用于以下幾個場景:
車輛通信:OSI 模型可以用于車輛之間的通信,例如車輛與車輛之間的通信 (V2V)、車輛與基礎設施之間的通信 (V2I)。
車輛感知:OSI 模型可以用于車輛感知系統之間的通信,例如雷達、攝像頭、激光雷達之間的通信。
車輛控制:OSI 模型可以用于車輛控制系統之間的通信,例如動力系統、轉向系統、制動系統之間的通信。
總體而言,基于OSI 模型開發的車載以太網在汽車方面的應用越來越廣泛,將在未來汽車的發展中發揮重要作用。
審核編輯:湯梓紅
-
傳感器
+關注
關注
2552文章
51228瀏覽量
754679 -
車載網絡
+關注
關注
6文章
160瀏覽量
31805 -
激光雷達
+關注
關注
968文章
3989瀏覽量
190076 -
車載以太網
+關注
關注
18文章
225瀏覽量
23031 -
自動駕駛
+關注
關注
784文章
13867瀏覽量
166603
原文標題:車載以太網介紹
文章出處:【微信號:Rocker-IC,微信公眾號:路科驗證】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦









詳細分析車載以太網基礎知識






 工商網監
工商網監
評論