") arm中斷是怎么實(shí)現(xiàn)的
arm中斷是怎么實(shí)現(xiàn)的
ARM中斷的實(shí)現(xiàn)是通過(guò)中斷控制器和異常模式實(shí)現(xiàn)的。ARM處理器通過(guò)中斷控制器來(lái)接收和處理外部的中斷信號(hào),而異常模式用于處理內(nèi)部的異常事件。本文將詳細(xì)介紹ARM中斷的原理和實(shí)現(xiàn)方式。
一、ARM中斷的分類
ARM中斷可以分為兩類:外部中斷和內(nèi)部異常。外部中斷是指來(lái)自外部設(shè)備(如外部中斷請(qǐng)求線或外設(shè))的中斷信號(hào),而內(nèi)部異常則是處理器內(nèi)部出現(xiàn)的異常事件。
- 外部中斷:ARM處理器通過(guò)外部中斷引腳(如IRQ和FIQ)接收外設(shè)發(fā)送的中斷請(qǐng)求信號(hào)。當(dāng)外設(shè)發(fā)出中斷請(qǐng)求信號(hào)時(shí),處理器會(huì)暫停當(dāng)前任務(wù),轉(zhuǎn)入中斷處理程序的執(zhí)行。
- 內(nèi)部異常:內(nèi)存訪問(wèn)錯(cuò)誤、指令執(zhí)行錯(cuò)誤、數(shù)據(jù)傳輸錯(cuò)誤等都屬于內(nèi)部異常。當(dāng)處理器檢測(cè)到這些異常事件發(fā)生時(shí),會(huì)中斷當(dāng)前任務(wù)的執(zhí)行,進(jìn)入異常處理程序。
二、中斷控制器
中斷控制器是一個(gè)硬件模塊,負(fù)責(zé)接收、分發(fā)和處理中斷請(qǐng)求。ARM處理器一般都搭載了一個(gè)或多個(gè)中斷控制器,如GIC(Generic Interrupt Controller)。
- 中斷請(qǐng)求的接收:中斷控制器通過(guò)外部中斷引腳(如IRQ和FIQ)接收外設(shè)發(fā)送的中斷請(qǐng)求信號(hào)。這些引腳通過(guò)外部電平或電壓的變化來(lái)傳遞中斷請(qǐng)求信號(hào)給中斷控制器。
- 中斷信號(hào)的分發(fā):中斷控制器將接收到的中斷信號(hào)進(jìn)行優(yōu)先級(jí)排序,并選出優(yōu)先級(jí)最高的中斷信號(hào),將其傳遞給處理器的中斷請(qǐng)求引腳。處理器通過(guò)檢查中斷請(qǐng)求引腳的狀態(tài)來(lái)判斷是否有中斷請(qǐng)求。
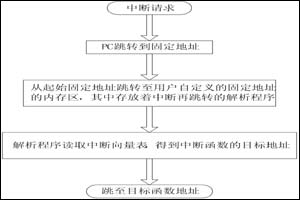
- 中斷處理程序的調(diào)度:一旦中斷請(qǐng)求引腳有信號(hào)變化,處理器就會(huì)中斷當(dāng)前任務(wù)的執(zhí)行,并轉(zhuǎn)入中斷處理程序。
三、異常模式
ARM處理器通過(guò)異常模式來(lái)處理內(nèi)部異常事件。
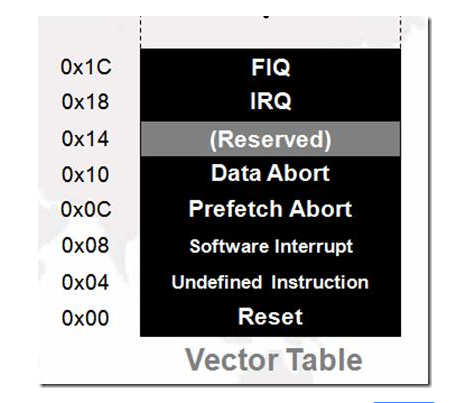
- 異常的觸發(fā):當(dāng)處理器檢測(cè)到某個(gè)內(nèi)部異常事件發(fā)生時(shí),例如除法錯(cuò)誤、未定義指令、非法指令、數(shù)據(jù)傳輸錯(cuò)誤等,會(huì)立即進(jìn)入異常模式。
- 異常處理程序:異常模式下,處理器會(huì)跳轉(zhuǎn)至相應(yīng)的異常處理程序,例如數(shù)據(jù)傳輸錯(cuò)誤會(huì)跳轉(zhuǎn)至數(shù)據(jù)終止處理程序。
- 異常返回:當(dāng)異常處理程序執(zhí)行完畢后,需要通過(guò)異常返回指令將控制權(quán)交還給中斷/異常產(chǎn)生前的程序。這樣,處理器就可以繼續(xù)執(zhí)行原來(lái)的任務(wù)。
四、中斷和異常處理流程
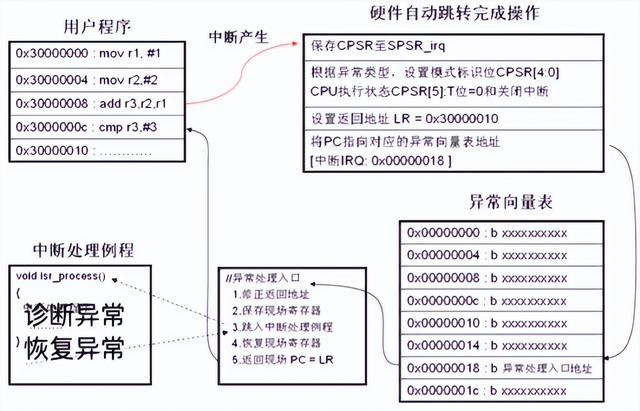
- 中斷處理流程:當(dāng)中斷請(qǐng)求引腳有信號(hào)變化時(shí),處理器會(huì)執(zhí)行以下步驟:
a) 保存當(dāng)前任務(wù)的上下文,包括寄存器的狀態(tài)和執(zhí)行狀態(tài)。
b) 確定中斷類型,并調(diào)用相應(yīng)的中斷處理程序。
c) 在中斷處理程序中保存其他必要信息,并根據(jù)業(yè)務(wù)需求執(zhí)行相關(guān)操作。
d) 從保存的上下文中恢復(fù)任務(wù)的狀態(tài),并繼續(xù)執(zhí)行中斷前的任務(wù)。 - 異常處理流程:當(dāng)處理器檢測(cè)到內(nèi)部異常事件發(fā)生時(shí),會(huì)執(zhí)行以下步驟:
a) 保存當(dāng)前任務(wù)的上下文,包括寄存器的狀態(tài)和執(zhí)行狀態(tài)。
b) 根據(jù)異常類型,跳轉(zhuǎn)至相應(yīng)的異常處理程序。
c) 在異常處理程序中保存其他必要信息,并根據(jù)業(yè)務(wù)需求執(zhí)行相關(guān)操作。
d) 從保存的上下文中恢復(fù)任務(wù)的狀態(tài),并繼續(xù)執(zhí)行發(fā)生異常的指令或跳轉(zhuǎn)至其他指令。
五、中斷與異常處理的關(guān)系
中斷和異常的共同點(diǎn)在于它們都可以中斷當(dāng)前任務(wù)的執(zhí)行,轉(zhuǎn)移到相應(yīng)的處理程序中。不同之處在于中斷是從外部設(shè)備發(fā)起的,而異常則是處理器內(nèi)部的錯(cuò)誤或特殊事件。
在ARM處理器中,中斷的優(yōu)先級(jí)通常高于異常。當(dāng)處理器同時(shí)收到中斷請(qǐng)求和異常事件時(shí),中斷請(qǐng)求會(huì)優(yōu)先被處理。這是因?yàn)橹袛嗤枰皶r(shí)響應(yīng)外部設(shè)備的請(qǐng)求,而異常則是錯(cuò)誤或特殊事件的處理,相對(duì)而言可以稍后處理。
六、中斷優(yōu)先級(jí)
ARM處理器的中斷請(qǐng)求可以設(shè)置不同的優(yōu)先級(jí)。通常,高優(yōu)先級(jí)的中斷請(qǐng)求會(huì)優(yōu)先被處理,而低優(yōu)先級(jí)的中斷請(qǐng)求則會(huì)被忽略,直到高優(yōu)先級(jí)的中斷處理完成。
中斷優(yōu)先級(jí)的設(shè)置可以通過(guò)中斷控制器完成。中斷控制器將收到的中斷請(qǐng)求進(jìn)行優(yōu)先級(jí)排序,并將優(yōu)先級(jí)最高的中斷請(qǐng)求傳遞給處理器。處理器會(huì)根據(jù)中斷請(qǐng)求的優(yōu)先級(jí)來(lái)決定是否中斷當(dāng)前任務(wù)。
總結(jié)
ARM中斷的實(shí)現(xiàn)是通過(guò)中斷控制器和異常模式來(lái)實(shí)現(xiàn)的。中斷控制器負(fù)責(zé)接收和分發(fā)外設(shè)發(fā)送的中斷請(qǐng)求信號(hào),而異常模式用于處理處理器內(nèi)部的異常事件。中斷和異常都可以中斷當(dāng)前任務(wù)的執(zhí)行,并跳轉(zhuǎn)至相應(yīng)的處理程序。中斷和異常的處理流程類似,但用途不同。中斷通常用于及時(shí)響應(yīng)外部設(shè)備的請(qǐng)求,而異常用于處理處理器內(nèi)部的錯(cuò)誤或特殊事件。
-
ARM
+關(guān)注
關(guān)注
134文章
9097瀏覽量
367560 -
控制器
+關(guān)注
關(guān)注
112文章
16361瀏覽量
178055 -
數(shù)據(jù)傳輸
+關(guān)注
關(guān)注
9文章
1891瀏覽量
64601 -
引腳
+關(guān)注
關(guān)注
16文章
1196瀏覽量
50484
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
ARM中斷體系和ZYNQ中斷體系詳解

什么是ARM中斷事件?ARM中斷異常處理具體過(guò)程
ARM S3C2440處理器的中斷處理是如何實(shí)現(xiàn)的
ARM內(nèi)核的中斷技術(shù)
ARM處理器中斷處理的編程實(shí)現(xiàn)
ARM中斷處理的研究

如何理解ARM異常、中斷和向量表
了解linux-2.6.26內(nèi)核中ARM中斷實(shí)現(xiàn)
Linux內(nèi)核中ARM中斷的實(shí)現(xiàn)資料詳解





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論