 e2studio開發三軸加速度計LIS2DW12(1)----輪詢獲取加速度數據
e2studio開發三軸加速度計LIS2DW12(1)----輪詢獲取加速度數據
概述
本文將介紹如何驅動和利用LIS2DW12傳感器,實現精確的運動感應功能。
IS2DW12是一款高性能、超低功耗的三軸線性加速度計,屬于“femto”系列,利用了成熟的微機械加速度計制造工藝。這個傳感器提供可選擇的全量程±2g/±4g/±8g/±16g,能夠以1.6 Hz至1600 Hz的數據輸出率測量加速度。它包含了一個32級的先進先出(FIFO)緩沖區,用于存儲數據,以減少主處理器的干預需求。
此外,LIS2DW12具備自測功能,可在最終應用中驗證傳感器功能,并集成了一個處理運動和加速度檢測的內部引擎。這包括自由落體、喚醒、敲擊識別、活動/靜止監測、靜止/運動檢測、縱向/橫向檢測以及6D/4D定向等功能。
最近在弄ST和瑞薩RA的課程,需要樣片的可以加群申請:615061293 。
視頻教學
[https://www.bilibili.com/video/BV16K4y1B7MQ/]
樣品申請
[https://www.wjx.top/vm/OhcKxJk.aspx#]
源碼下載
[https://download.csdn.net/download/qq_24312945/88719392]
通信模式
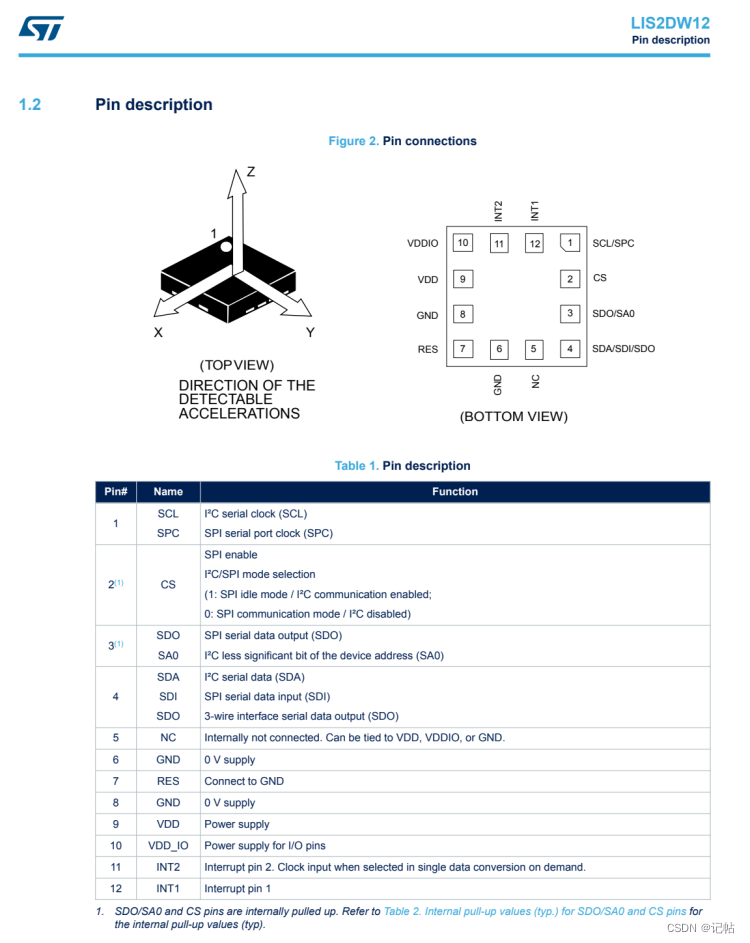
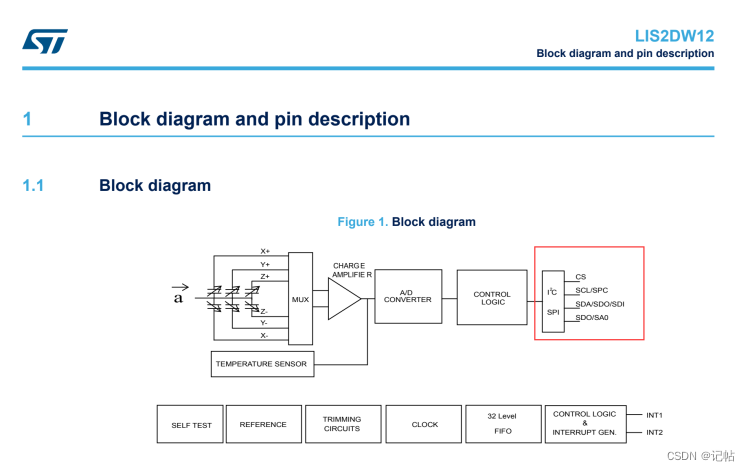
對于LIS2DW12,可以使用SPI或者IIC進行通訊。 最小系統圖如下所示。
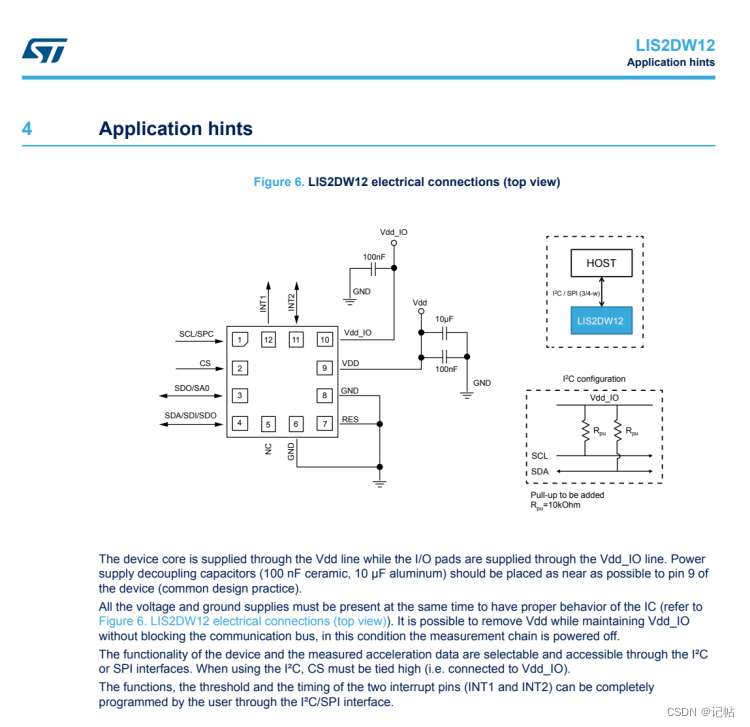
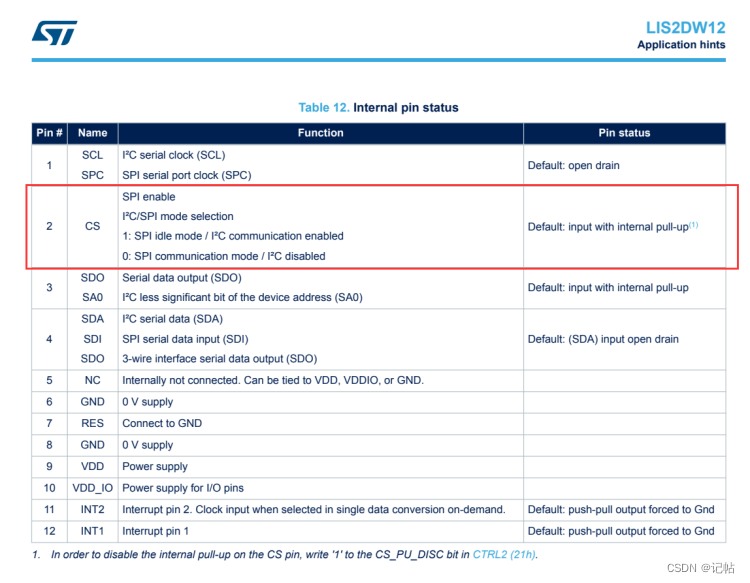
在CS管腳為1的時候,為IIC模式。
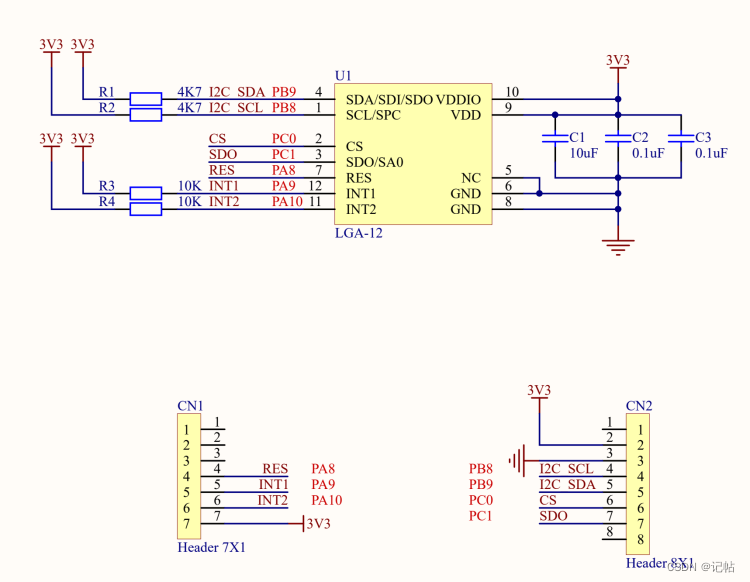
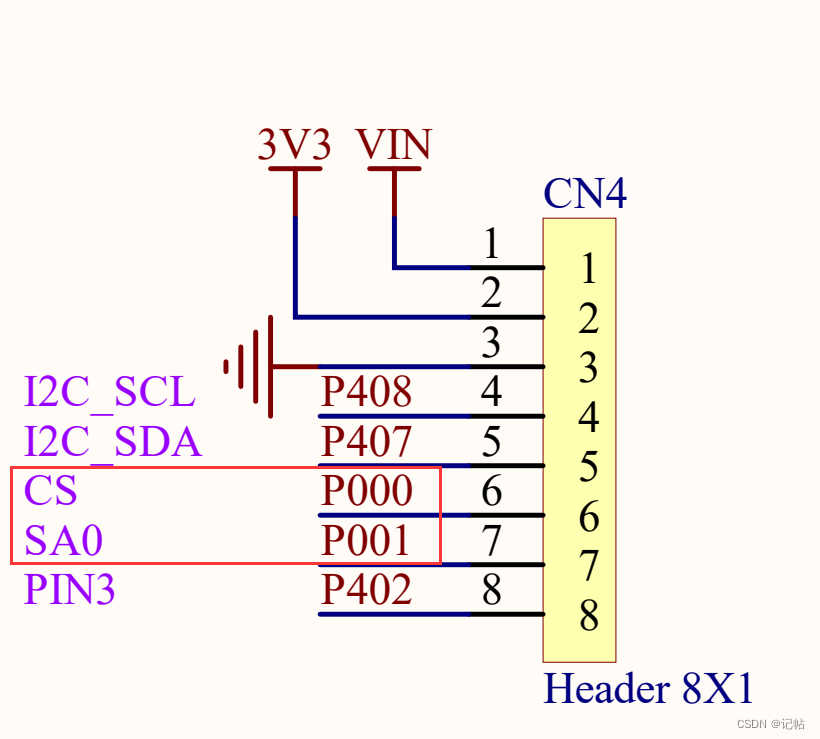
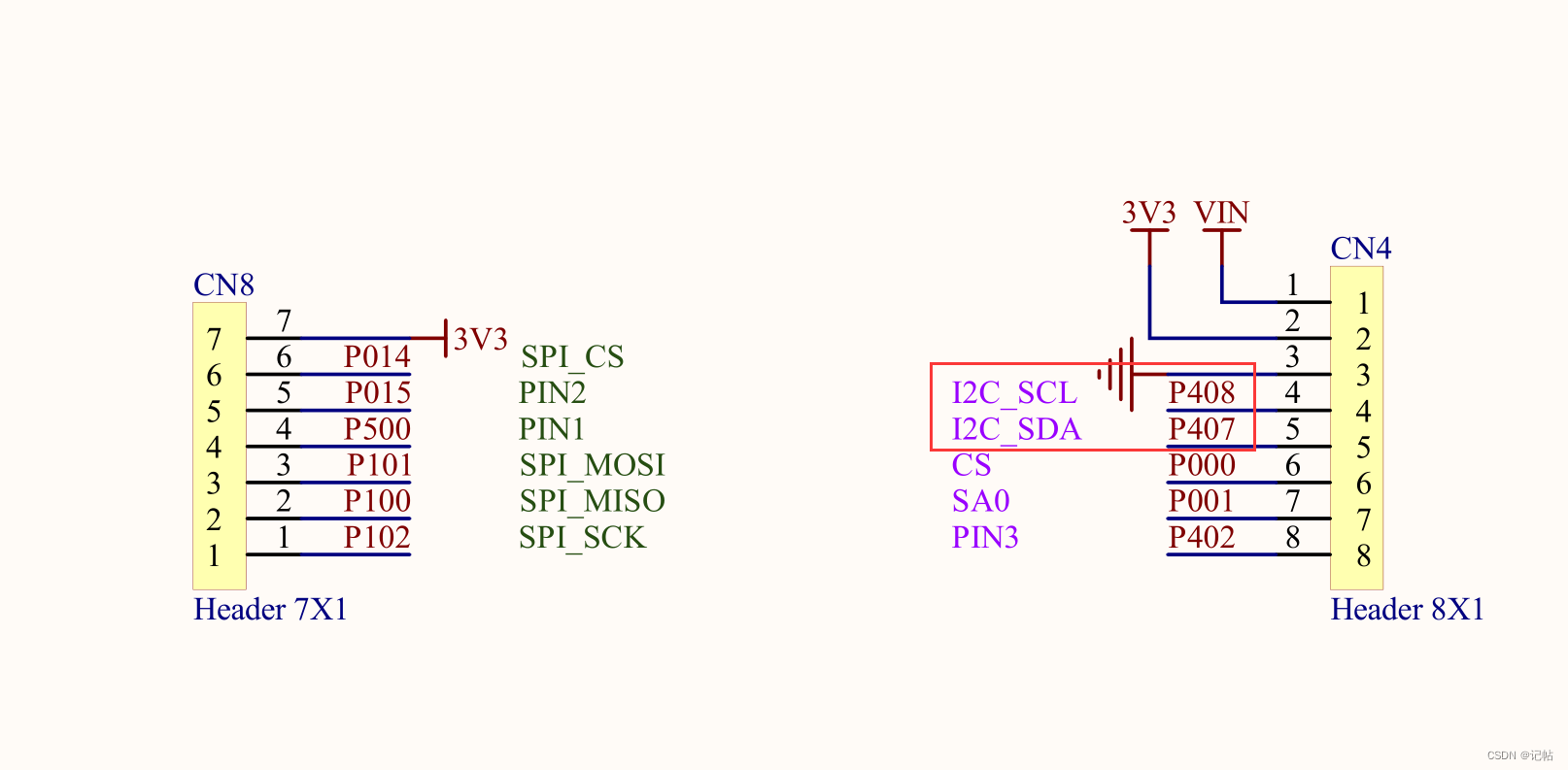
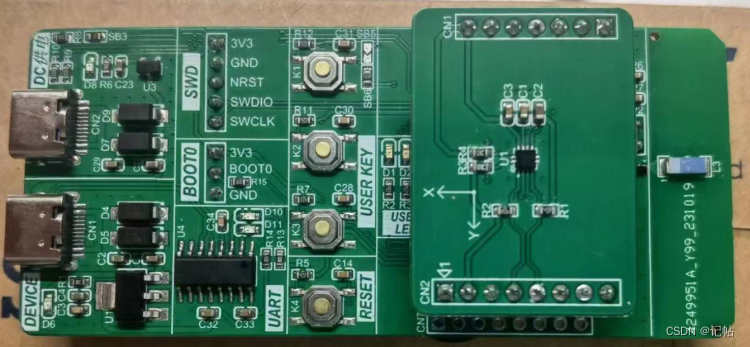
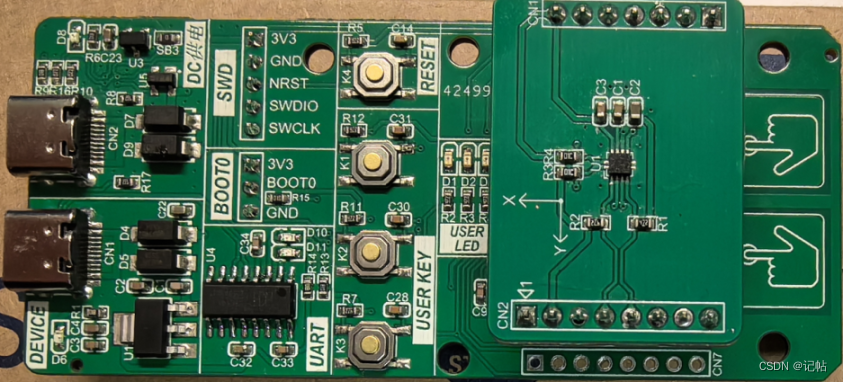
本文使用的板子原理圖如下所示。
管腳定義
IIC通信模式
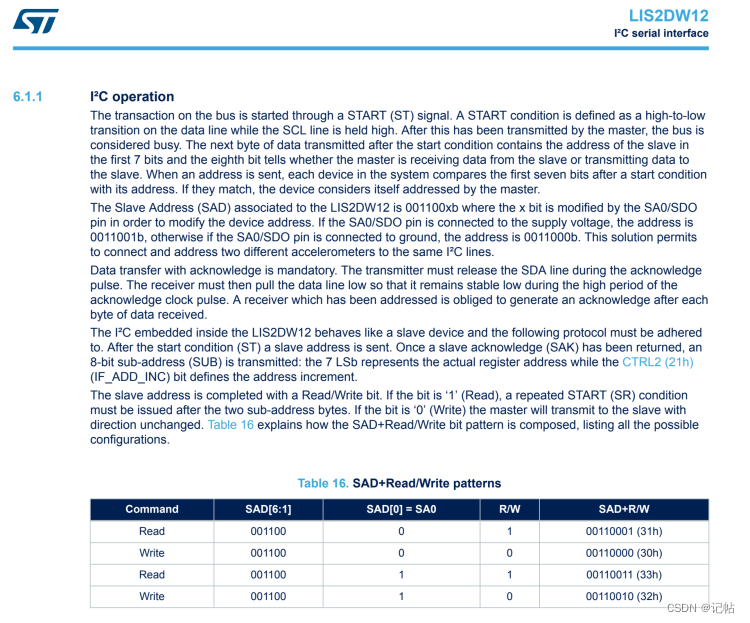
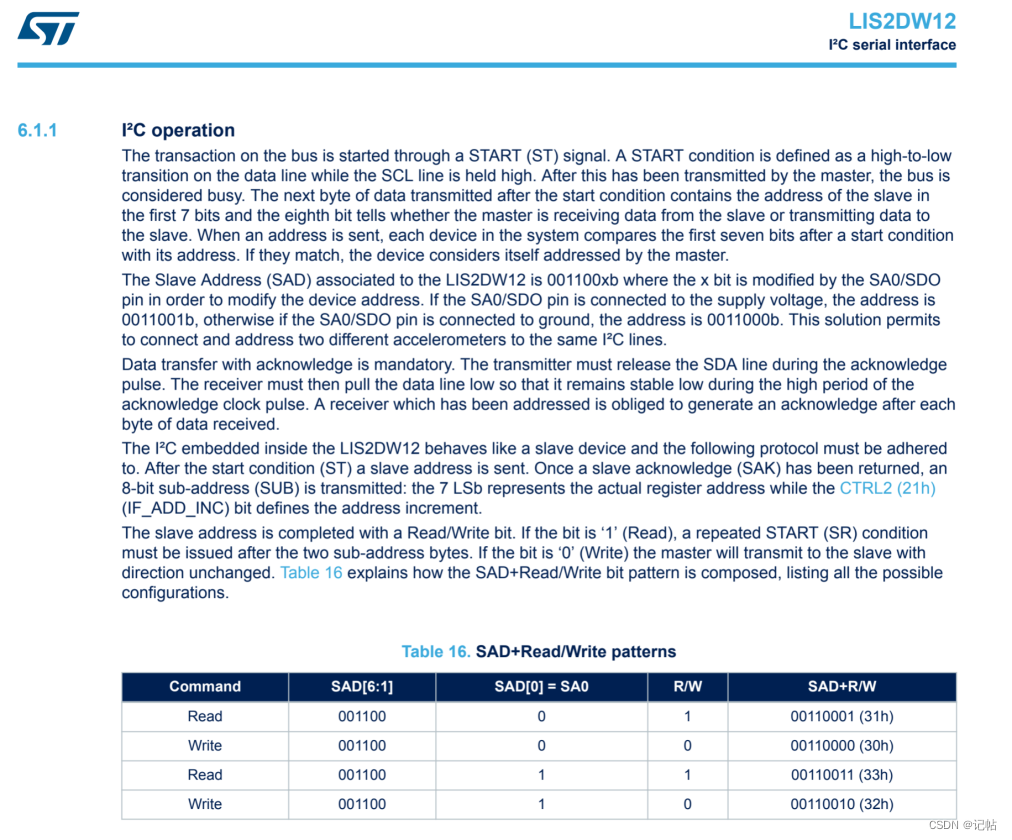
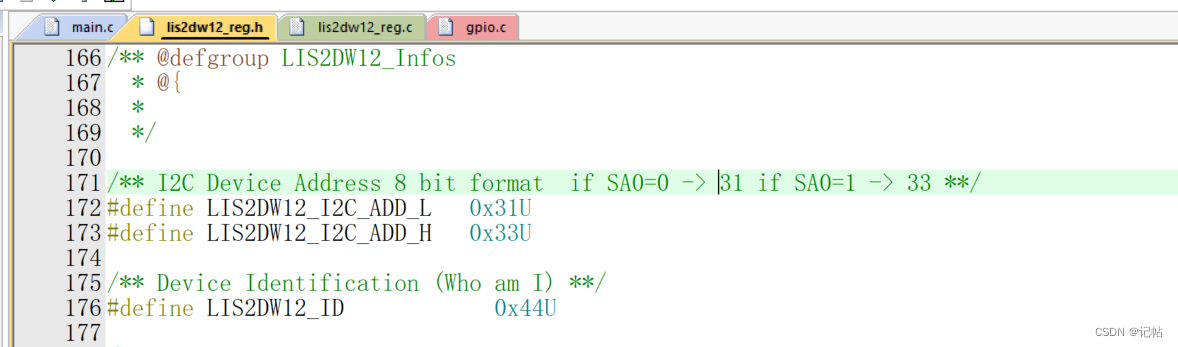
在使用IIC通訊模式的時候,SA0是用來控制IIC的地址位的。
對于IIC的地址,可以通過SDO/SA0引腳修改。SDO/SA0引腳可以用來修改設備地址的最低有效位。如果SDO/SA0引腳連接到電源電壓,LSb(最低有效位)為'1'(地址0011001b);否則,如果SDO/SA0引腳連接到地線,LSb的值為'0'(地址0011000b)。
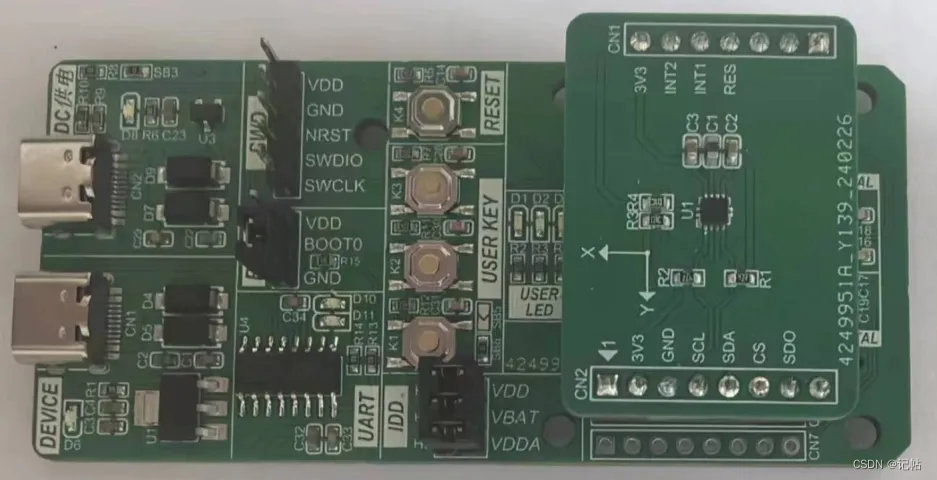
對應的IIC接口如下所示。 主要使用的管腳為CS、SCL、SDA、SA0。
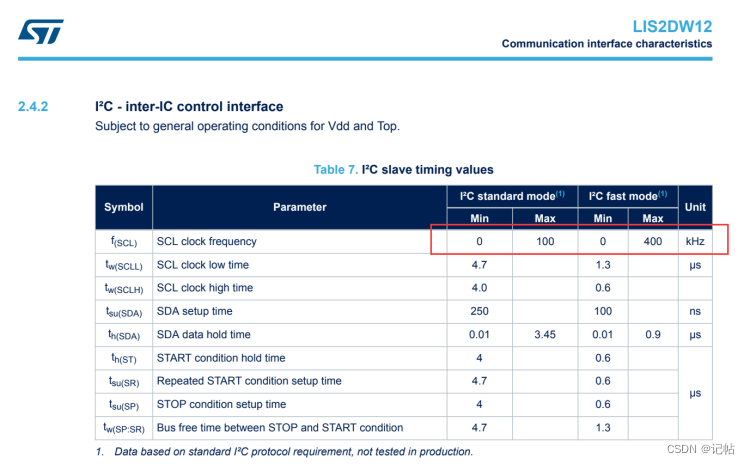
速率
該模塊支持的速度為普通模式(100k)和快速模式(400k)。
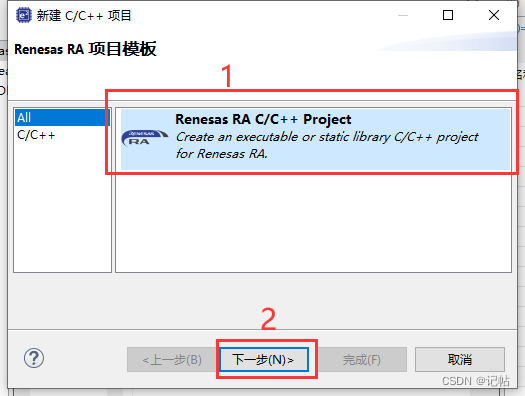
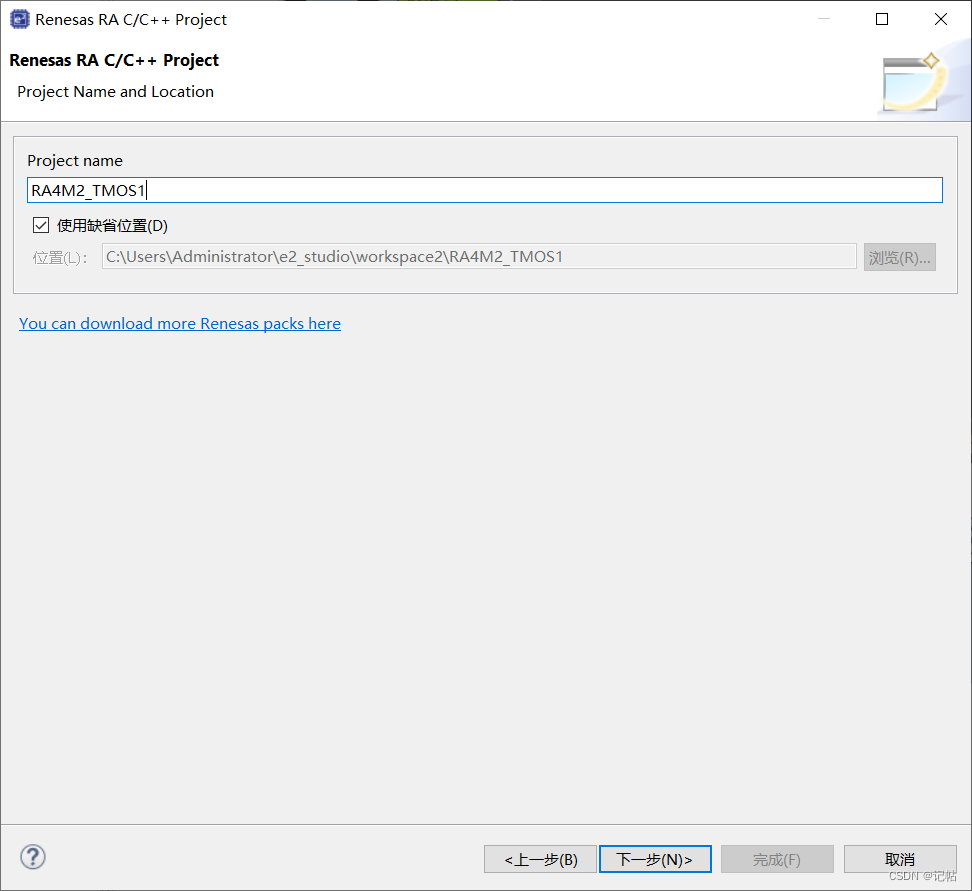
新建工程

工程模板
保存工程路徑
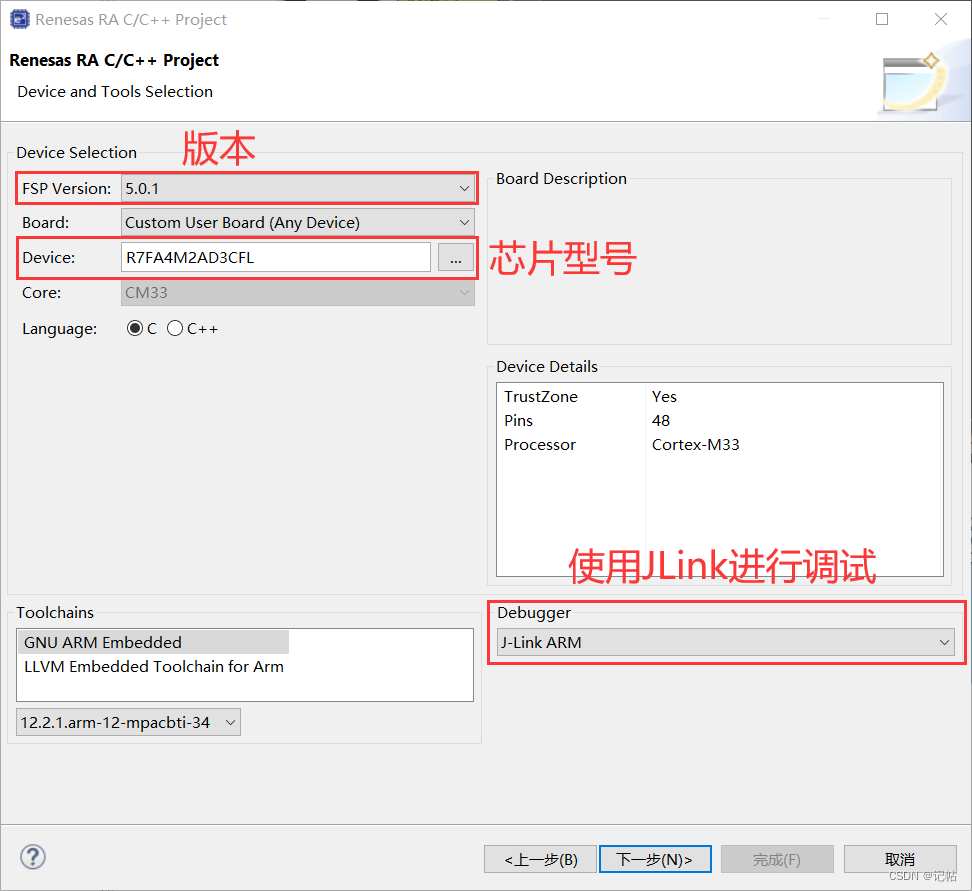
芯片配置
本文中使用R7FA4M2AD3CFL來進行演示。
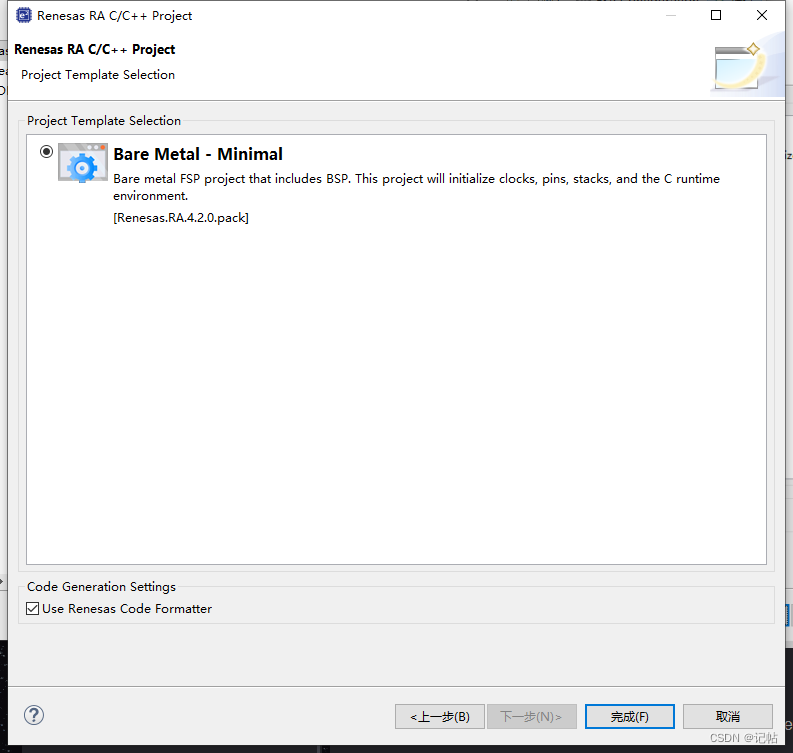
工程模板選擇
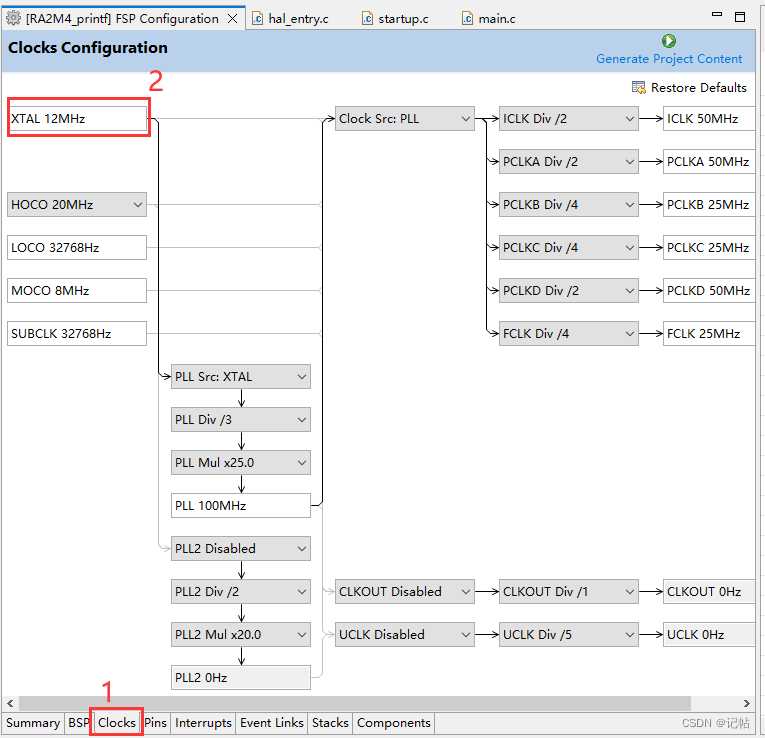
時鐘設置
開發板上的外部高速晶振為12M.
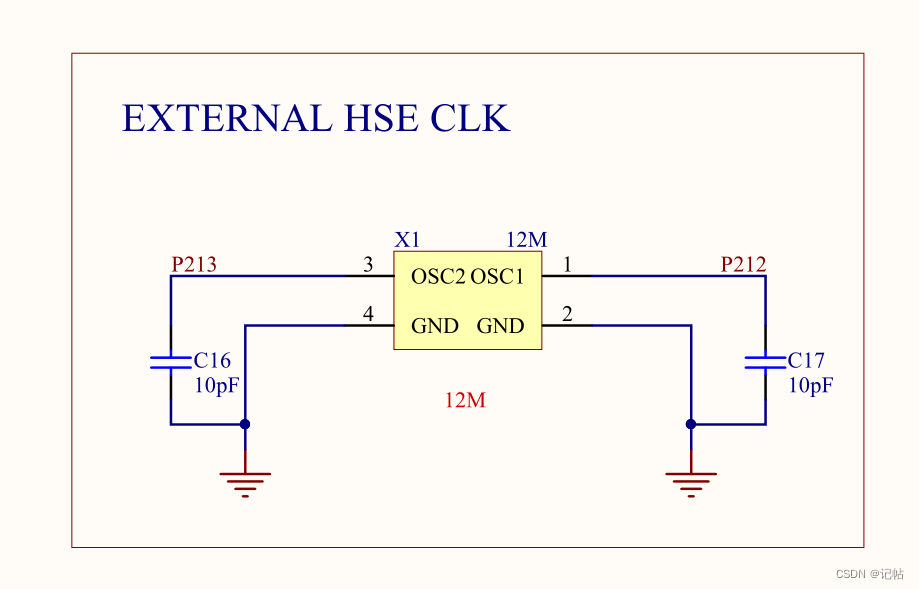
需要修改XTAL為12M。
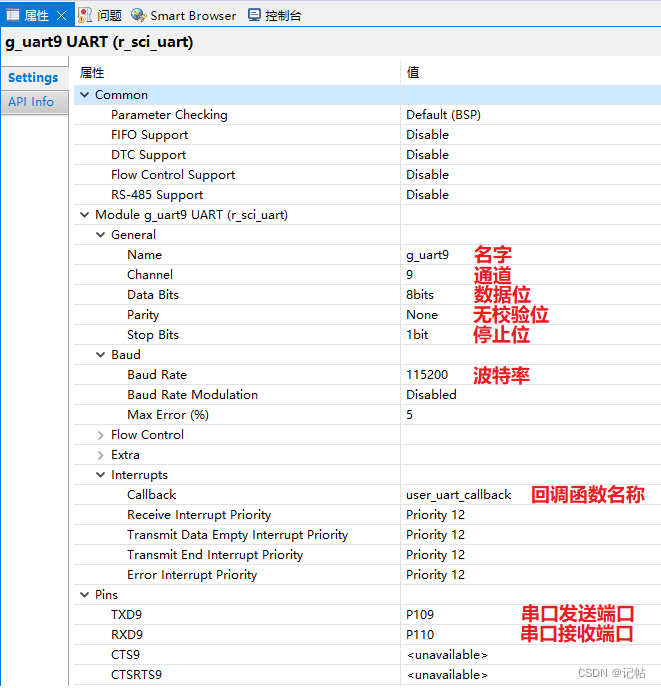
UART配置
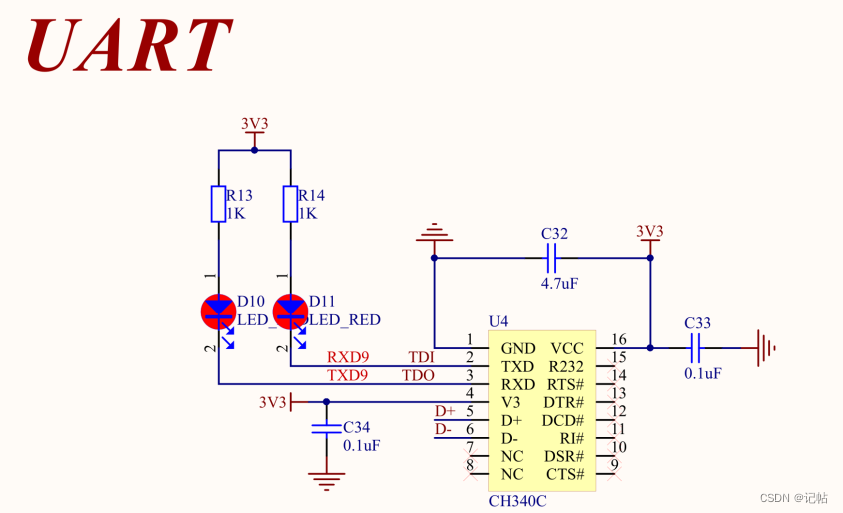
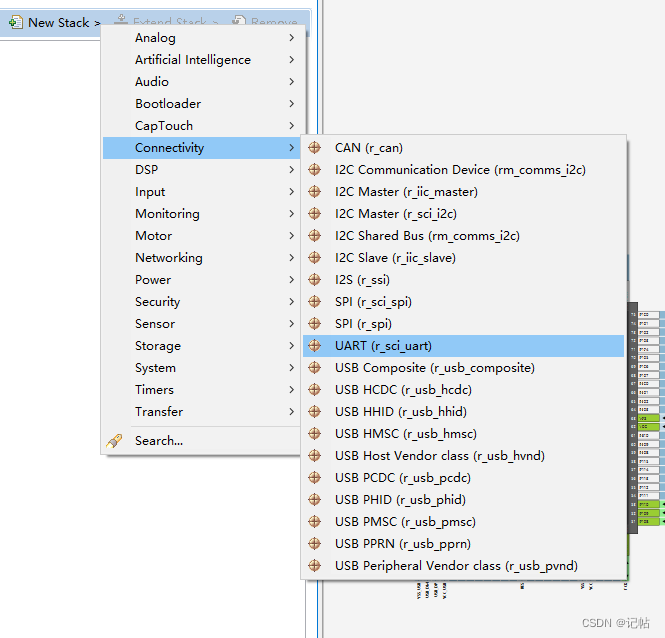
點擊Stacks->New Stack->Driver->Connectivity -> UART Driver on r_sci_uart。
UART屬性配置
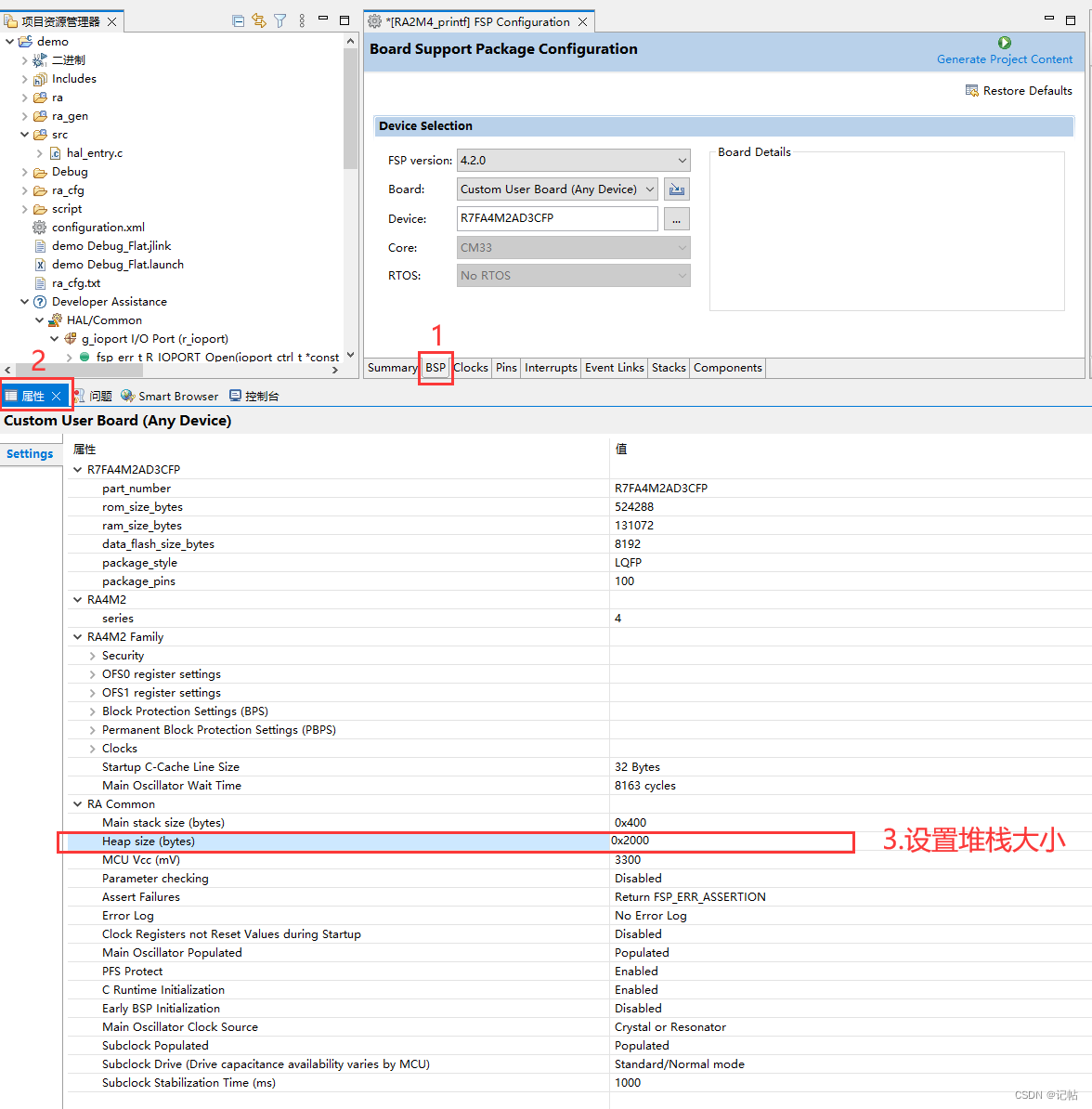
設置e2studio堆棧
printf函數通常需要設置堆棧大小。這是因為printf函數在運行時需要使用棧空間來存儲臨時變量和函數調用信息。如果堆棧大小不足,可能會導致程序崩潰或不可預期的行為。
printf函數使用了可變參數列表,它會在調用時使用棧來存儲參數,在函數調用結束時再清除參數,這需要足夠的棧空間。另外printf也會使用一些臨時變量,如果棧空間不足,會導致程序崩潰。
因此,為了避免這類問題,應該根據程序的需求來合理設置堆棧大小。
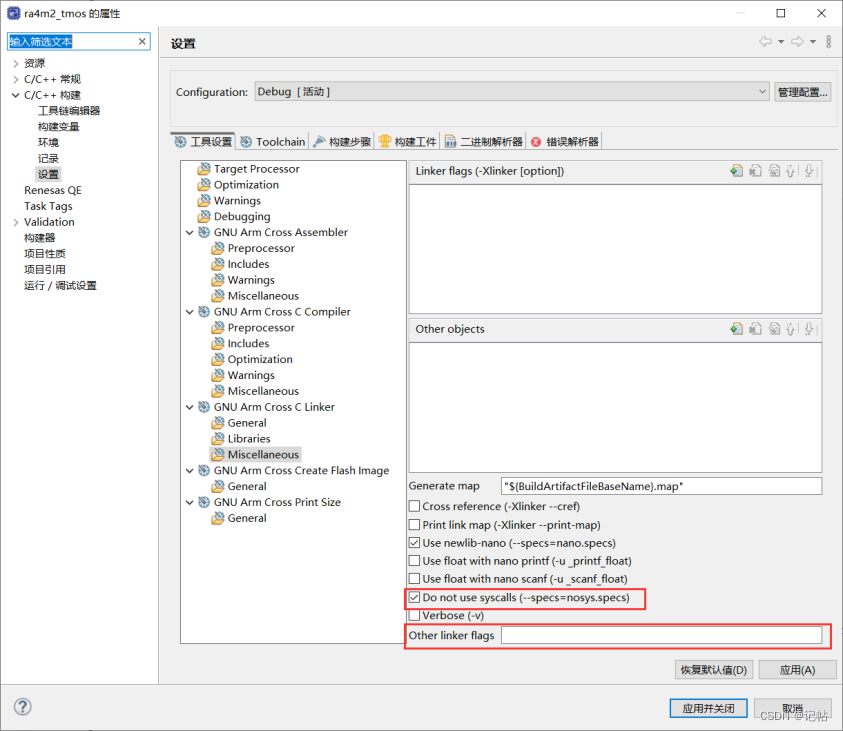
e2studio的重定向printf設置
在嵌入式系統的開發中,尤其是在使用GNU編譯器集合(GCC)時,–specs 參數用于指定鏈接時使用的系統規格(specs)文件。這些規格文件控制了編譯器和鏈接器的行為,尤其是關于系統庫和啟動代碼的鏈接。–specs=rdimon.specs 和 --specs=nosys.specs 是兩種常見的規格文件,它們用于不同的場景。
–specs=rdimon.specs
用途: 這個選項用于鏈接“Redlib”庫,這是為裸機(bare-metal)和半主機(semihosting)環境設計的C庫的一個變體。半主機環境是一種特殊的運行模式,允許嵌入式程序通過宿主機(如開發PC)的調試器進行輸入輸出操作。
應用場景: 當你需要在沒有完整操作系統的環境中運行程序,但同時需要使用調試器來處理輸入輸出(例如打印到宿主機的終端),這個選項非常有用。
特點: 它提供了一些基本的系統調用,通過調試接口與宿主機通信。
–specs=nosys.specs
用途: 這個選項鏈接了一個非常基本的系統庫,這個庫不提供任何系統服務的實現。
應用場景: 適用于完全的裸機程序,其中程序不執行任何操作系統調用,比如不進行文件操作或者系統級輸入輸出。
特點: 這是一個更“裸”的環境,沒有任何操作系統支持。使用這個規格文件,程序不期望有操作系統層面的任何支持。
如果你的程序需要與宿主機進行交互(如在開發期間的調試),并且通過調試器進行基本的輸入輸出操作,則使用 --specs=rdimon.specs。
如果你的程序是完全獨立的,不需要任何形式的操作系統服務,包括不進行任何系統級的輸入輸出,則使用 --specs=nosys.specs。
R_SCI_UART_Open()函數原型
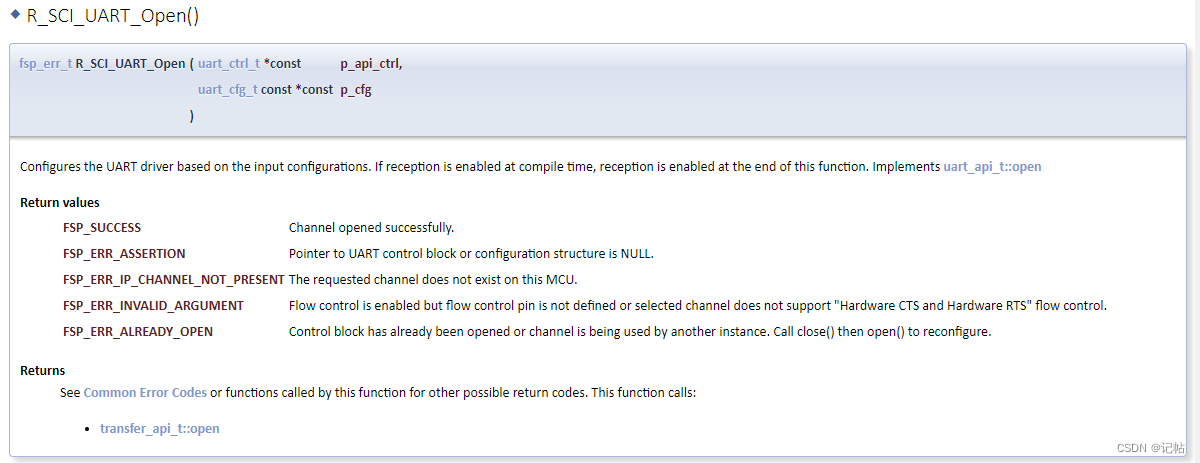
故可以用 R_SCI_UART_Open()函數進行配置,開啟和初始化UART。
/* Open the transfer instance with initial configuration. */
err = R_SCI_UART_Open(&g_uart9_ctrl, &g_uart9_cfg);
assert(FSP_SUCCESS == err);
回調函數user_uart_callback ()
當數據發送的時候,可以查看UART_EVENT_TX_COMPLETE來判斷是否發送完畢。
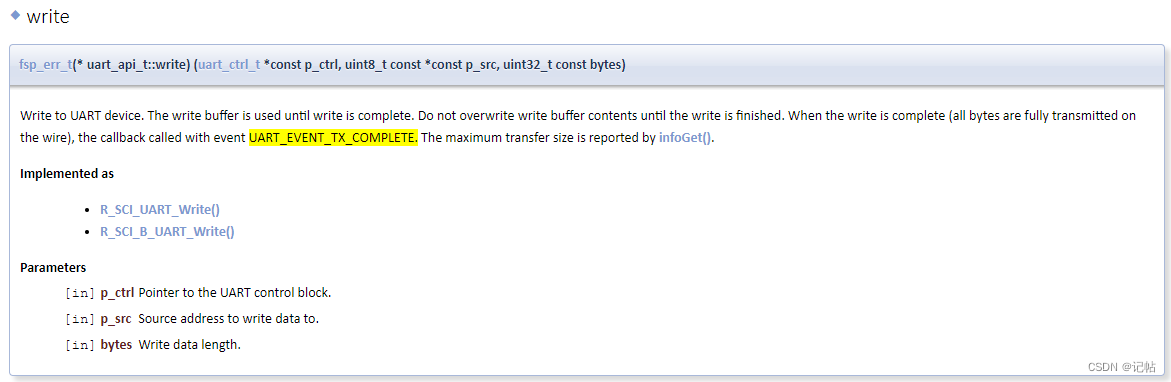
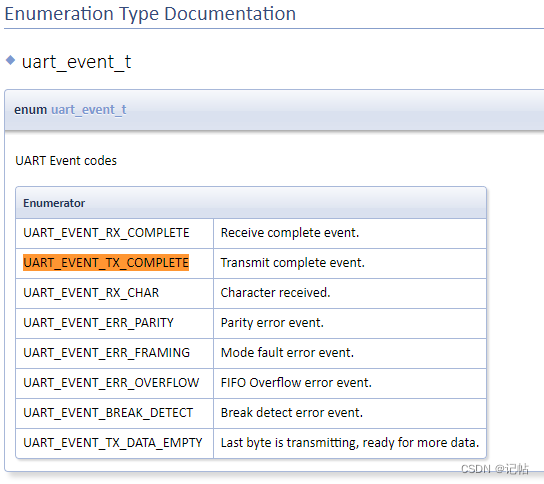
可以檢查檢查 "p_args" 結構體中的 "event" 字段的值是否等于 "UART_EVENT_TX_COMPLETE"。如果條件為真,那么 if 語句后面的代碼塊將會執行。
fsp_err_t err = FSP_SUCCESS;
volatile bool uart_send_complete_flag = false;
void user_uart_callback (uart_callback_args_t * p_args)
{
if(p_args- >event == UART_EVENT_TX_COMPLETE)
{
uart_send_complete_flag = true;
}
}
printf輸出重定向到串口
打印最常用的方法是printf,所以要解決的問題是將printf的輸出重定向到串口,然后通過串口將數據發送出去。 注意一定要加上頭文件#include
#ifdef __GNUC__ //串口重定向
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
PUTCHAR_PROTOTYPE
{
err = R_SCI_UART_Write(&g_uart9_ctrl, (uint8_t *)&ch, 1);
if(FSP_SUCCESS != err) __BKPT();
while(uart_send_complete_flag == false){}
uart_send_complete_flag = false;
return ch;
}
int _write(int fd,char *pBuffer,int size)
{
for(int i=0;i< size;i++)
{
__io_putchar(*pBuffer++);
}
return size;
}
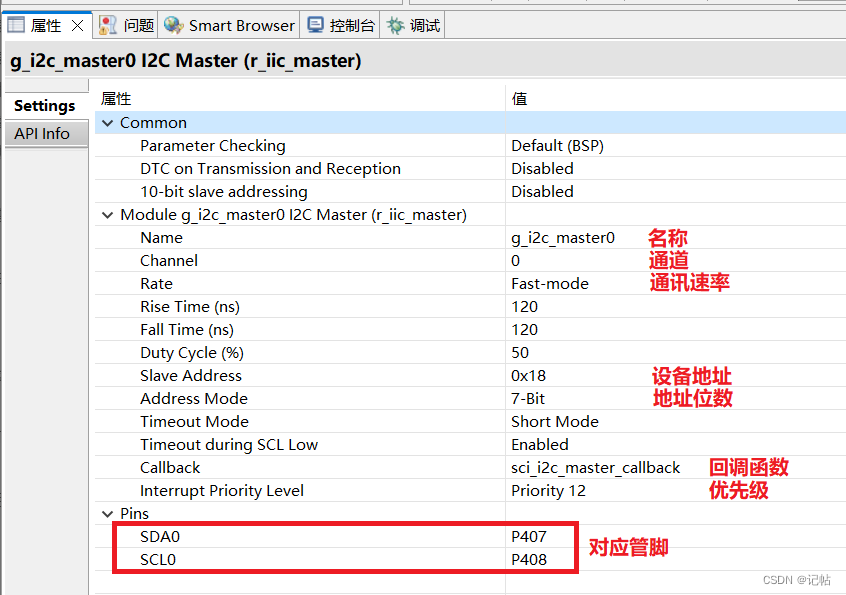
IIC屬性配置
查看手冊,可以得知LIS2DW12的IIC地址為“0011000” 或者 “0011001”,即0x18或0x19。
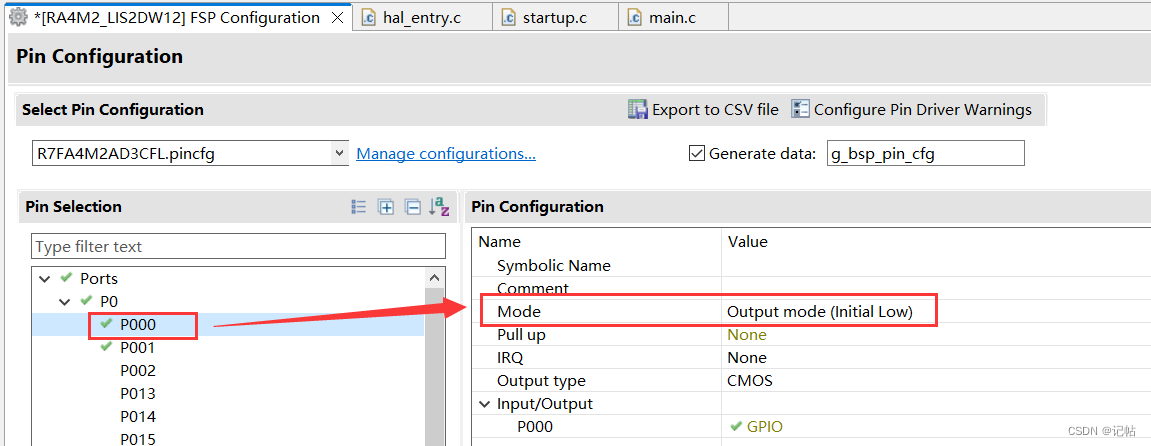
初始換管腳
由于需要向LIS2DW12_I2C_ADD_L寫入以及為IIC模式。
所以使能CS為高電平,配置為IIC模式。
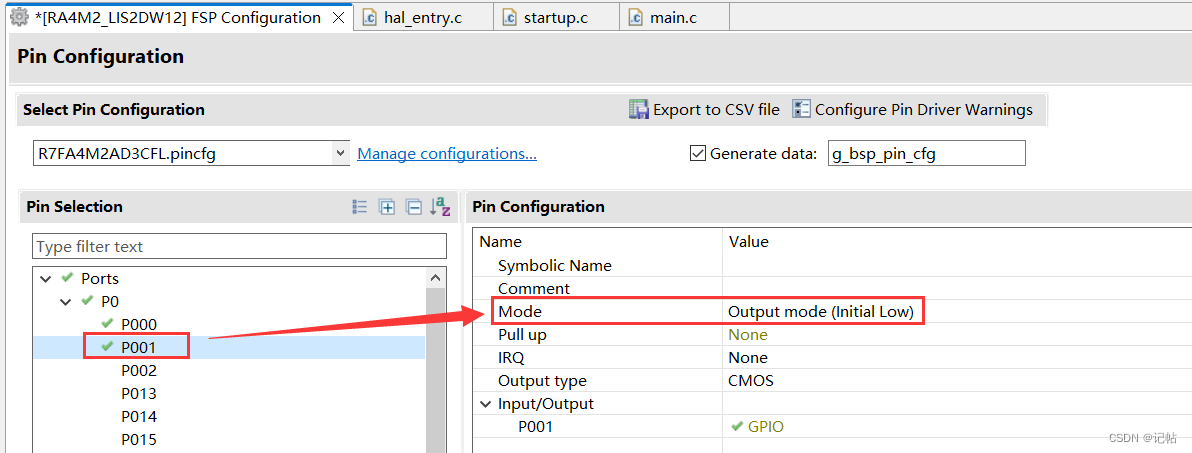
配置SA0為低電平。
R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_00_PIN_00, BSP_IO_LEVEL_HIGH);
R_IOPORT_PinWrite(&g_ioport_ctrl, BSP_IO_PORT_00_PIN_01, BSP_IO_LEVEL_LOW);
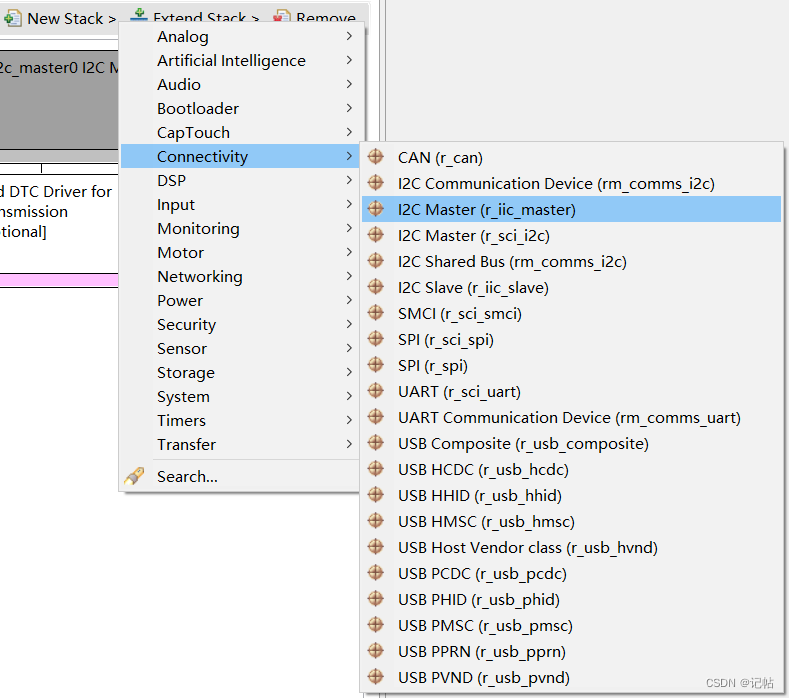
IIC配置
配置RA4M2的I2C接口,使其作為I2C master進行通信。 查看開發板原理圖,對應的IIC為P407和P408。
點擊Stacks->New Stack->Connectivity -> I2C Master(r_iic_master)。
設置IIC的配置,需要注意從機的地址。
R_IIC_MASTER_Open()函數原型
R_IIC_MASTER_Open()函數為執行IIC初始化,開啟配置如下所示。
/* Initialize the I2C module */
err = R_IIC_MASTER_Open(&g_i2c_master0_ctrl, &g_i2c_master0_cfg);
/* Handle any errors. This function should be defined by the user. */
assert(FSP_SUCCESS == err);
R_IIC_MASTER_Write()函數原型
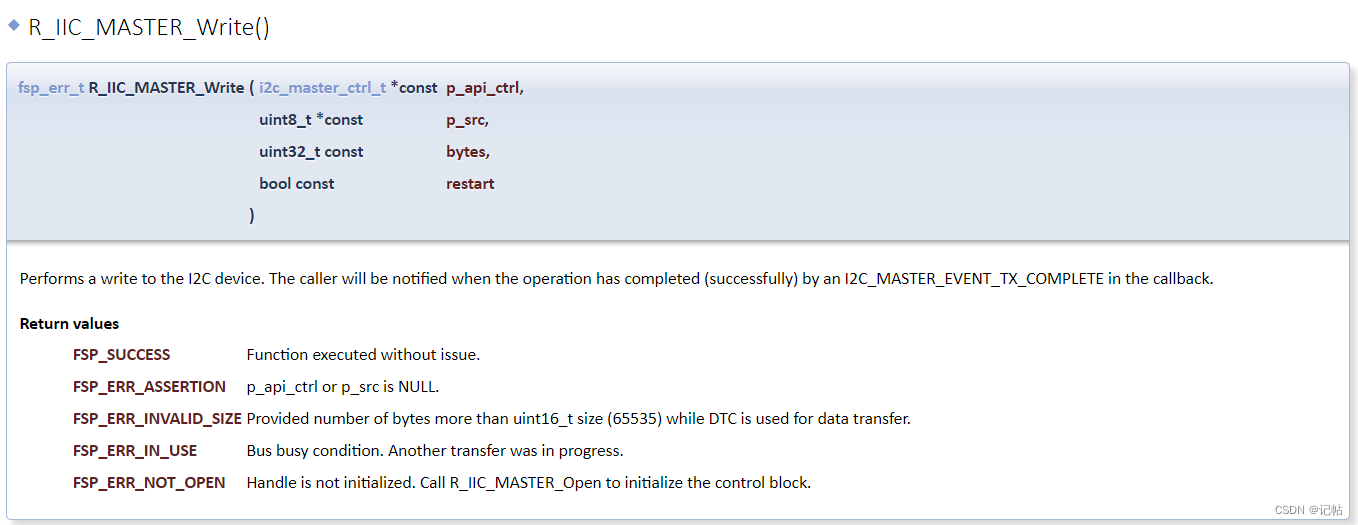
R_IIC_MASTER_Write()函數是向IIC設備中寫入數據,寫入格式如下所示。
err = R_IIC_MASTER_Write(&g_i2c_master0_ctrl, ®, 1, true);
assert(FSP_SUCCESS == err);
R_IIC_MASTER_Read()函數原型
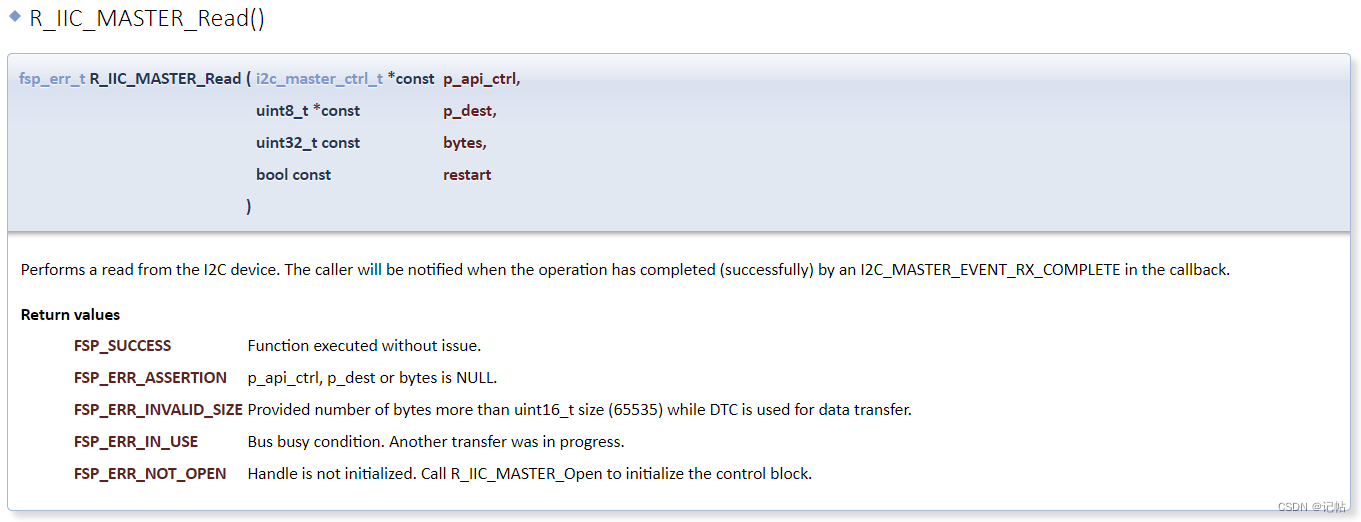
R_SCI_I2C_Read()函數是向IIC設備中讀取數據,讀取格式如下所示。
/* Read data from I2C slave */
err = R_IIC_MASTER_Read(&g_i2c_master0_ctrl, bufp, len, false);
assert(FSP_SUCCESS == err);
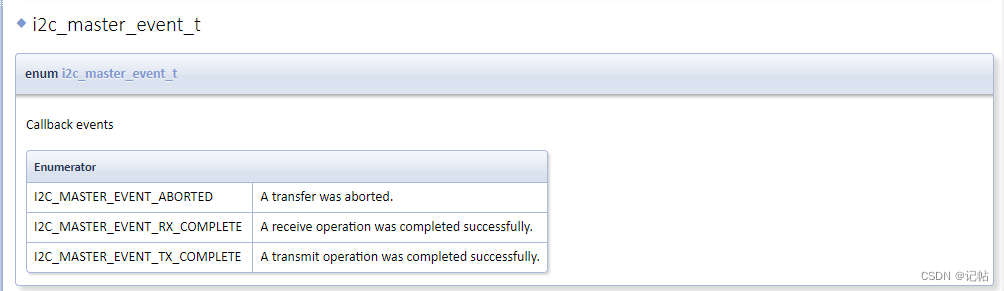
sci_i2c_master_callback()回調函數
對于數據是否發送完畢,可以查看是否獲取到I2C_MASTER_EVENT_TX_COMPLETE字段。
/* Callback function */
i2c_master_event_t i2c_event = I2C_MASTER_EVENT_ABORTED;
uint32_t timeout_ms = 100000;
void sci_i2c_master_callback(i2c_master_callback_args_t *p_args)
{
i2c_event = I2C_MASTER_EVENT_ABORTED;
if (NULL != p_args)
{
/* capture callback event for validating the i2c transfer event*/
i2c_event = p_args- >event;
}
}
參考程序
[https://github.com/STMicroelectronics/lis2dw12-pid]
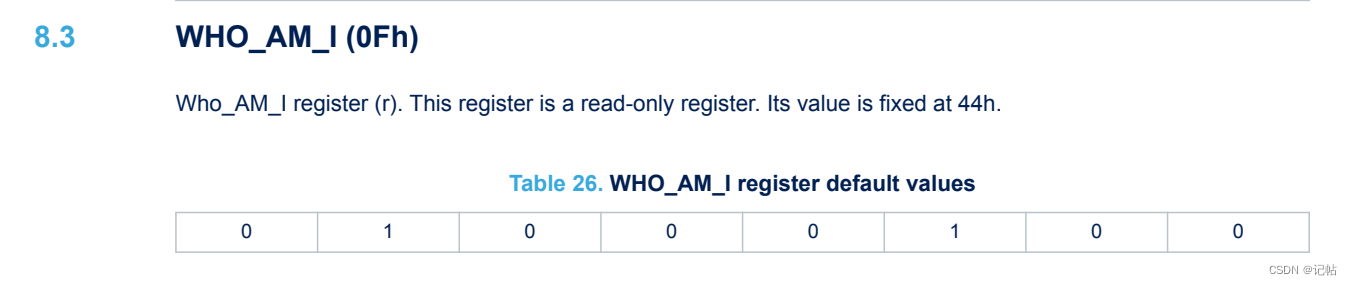
獲取ID
我們可以向WHO_AM_I (0Fh)獲取固定值,判斷是否為0x44。
lis2dw12_device_id_get為獲取函數。
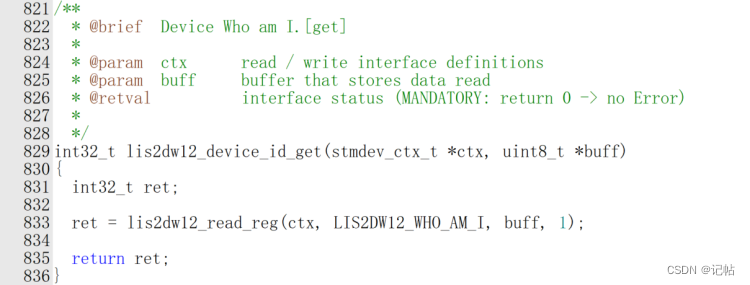
對應的獲取ID驅動程序,如下所示。
/* Initialize mems driver interface */
stmdev_ctx_t dev_ctx;
dev_ctx.write_reg = platform_write;
dev_ctx.read_reg = platform_read;
dev_ctx.handle = &SENSOR_BUS;
/* Wait sensor boot time */
platform_delay(BOOT_TIME);
/* Check device ID */
lis2dw12_device_id_get(&dev_ctx, &whoamI);
printf("LIS2DW12_ID=0x%x,whoamI=0x%xn",LIS2DW12_ID,whoamI);
if (whoamI != LIS2DW12_ID)
while (1) {
/* manage here device not found */
}
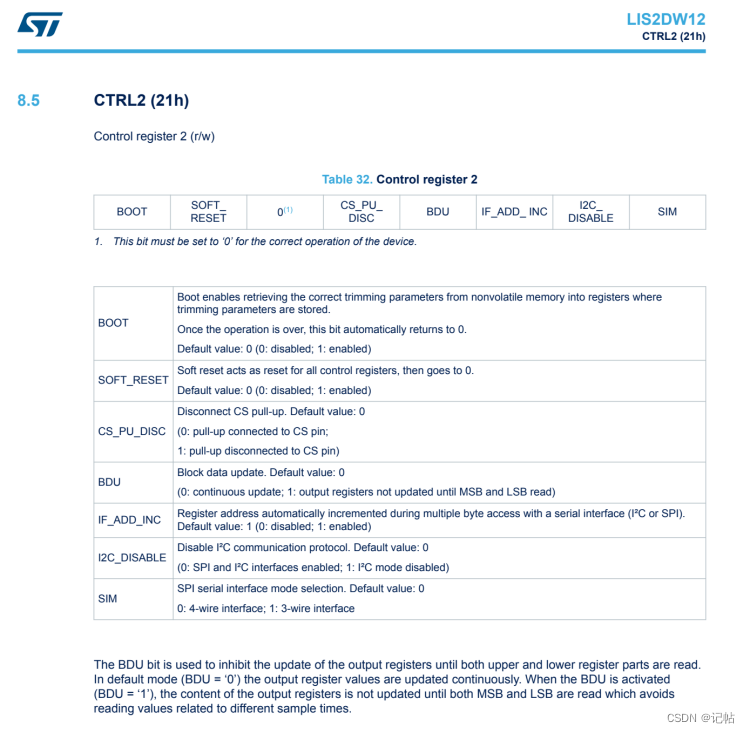
復位操作
可以向CTRL2 (21h)的SOFT_RESET寄存器寫入1進行復位。
lis2dw12_reset_set為重置函數。
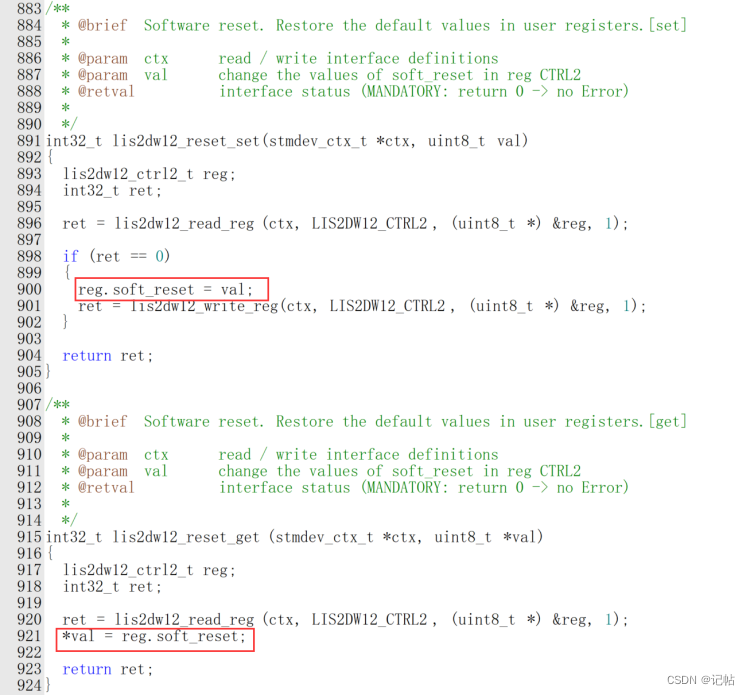
對應的驅動程序,如下所示。
/* Restore default configuration */
lis2dw12_reset_set(&dev_ctx, PROPERTY_ENABLE);
do {
lis2dw12_reset_get(&dev_ctx, &rst);
} while (rst);
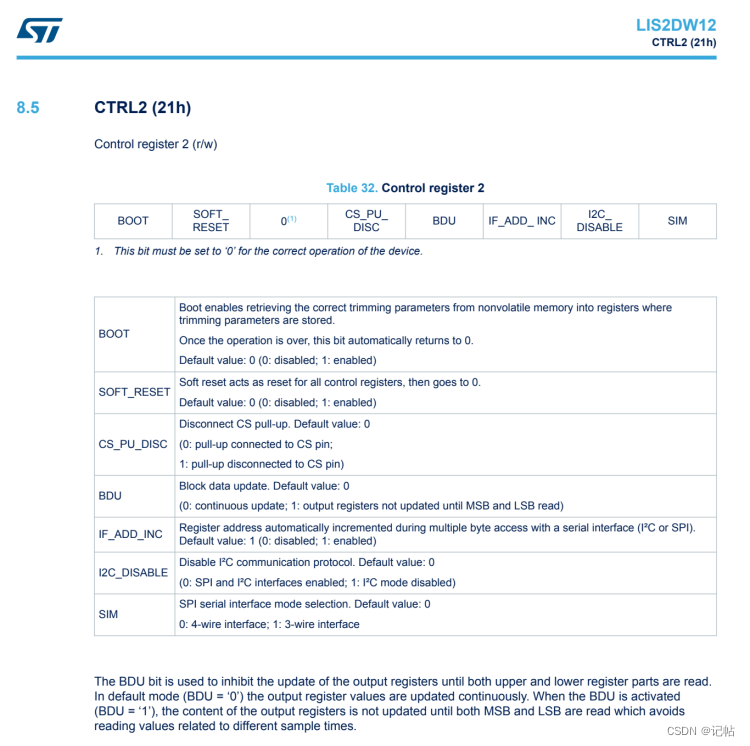
BDU設置
在很多傳感器中,數據通常被存儲在輸出寄存器中,這些寄存器分為兩部分:MSB和LSB。這兩部分共同表示一個完整的數據值。例如,在一個加速度計中,MSB和LSB可能共同表示一個加速度的測量值。
連續更新模式(BDU = ‘0’):在默認模式下,輸出寄存器的值會持續不斷地被更新。這意味著在你讀取MSB和LSB的時候,寄存器中的數據可能會因為新的測量數據而更新。這可能導致一個問題:當你讀取MSB時,如果寄存器更新了,接下來讀取的LSB可能就是新的測量值的一部分,而不是與MSB相對應的值。這樣,你得到的就是一個“拼湊”的數據,它可能無法準確代表任何實際的測量時刻。
塊數據更新(BDU)模式(BDU = ‘1’):當激活BDU功能時,輸出寄存器中的內容不會在讀取MSB和LSB之間更新。這就意味著一旦開始讀取數據(無論是先讀MSB還是LSB),寄存器中的那一組數據就被“鎖定”,直到兩部分都被讀取完畢。這樣可以確保你讀取的MSB和LSB是同一測量時刻的數據,避免了讀取到代表不同采樣時刻的數據。
簡而言之,BDU位的作用是確保在讀取數據時,輸出寄存器的內容保持穩定,從而避免讀取到拼湊或錯誤的數據。這對于需要高精度和穩定性的應用尤為重要。
可以向CTRL2 (21h)的BDU寄存器寫入1進行開啟。
對應的驅動程序,如下所示。
/* Enable Block Data Update */
lis2dw12_block_data_update_set(&dev_ctx, PROPERTY_ENABLE);
設置傳感器的量程
FS[1:0] - 全量程選擇:這兩個位用于設置傳感器的量程。量程決定了傳感器可以測量的最大加速度值。例如,量程可以設置為±2g、±4g、±8g或±16g。這允許用戶根據應用的特定需求調整傳感器的靈敏度。 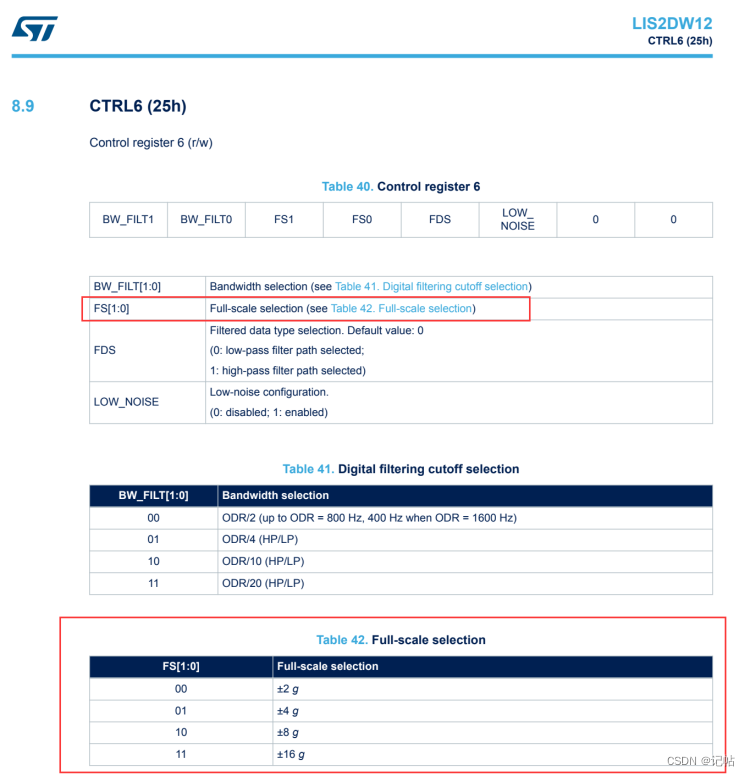
對應的驅動程序,如下所示。
/* Set full scale */
lis2dw12_full_scale_set(&dev_ctx, LIS2DW12_2g);
配置過濾器鏈
lis2dw12_filter_path_set(&dev_ctx, LIS2DW12_LPF_ON_OUT);:設置加速度計輸出的過濾器路徑。這里選擇了輸出上的低通濾波器(LPF),用于去除高頻噪聲。 lis2dw12_filter_bandwidth_set(&dev_ctx, LIS2DW12_ODR_DIV_4);:設置過濾器的帶寬。這里的設置是將輸出數據率(ODR)除以4,進一步決定了濾波器的截止頻率。
配置電源模式
lis2dw12_power_mode_set(&dev_ctx, LIS2DW12_HIGH_PERFORMANCE);:這個調用設置加速度計的電源模式為高性能模式。這通常意味著更高的功耗,但提供更精確的測量。
設置輸出數據速率
lis2dw12_data_rate_set(&dev_ctx, LIS2DW12_XL_ODR_25Hz);:設置加速度計的輸出數據速率為每秒25次。輸出數據速率決定了傳感器多久采集一次數據,并影響數據的實時性和功耗。
/* Enable Block Data Update */
lis2dw12_block_data_update_set(&dev_ctx, PROPERTY_ENABLE);
/* Set full scale */
lis2dw12_full_scale_set(&dev_ctx, LIS2DW12_2g);
/* Configure filtering chain
* Accelerometer - filter path / bandwidth
*/
lis2dw12_filter_path_set(&dev_ctx, LIS2DW12_LPF_ON_OUT);
lis2dw12_filter_bandwidth_set(&dev_ctx, LIS2DW12_ODR_DIV_4);
/* Configure power mode */
lis2dw12_power_mode_set(&dev_ctx, LIS2DW12_HIGH_PERFORMANCE);
/* Set Output Data Rate */
lis2dw12_data_rate_set(&dev_ctx, LIS2DW12_XL_ODR_25Hz);
輪詢獲取加速度
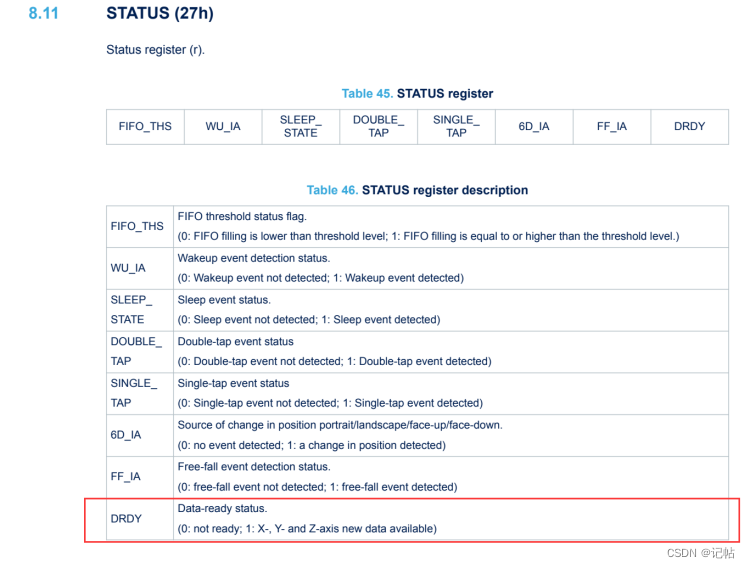
檢查新數據是否可用: lis2dw12_flag_data_ready_get(&dev_ctx, ®);:這個函數調用檢查加速度計是否有新的數據可讀。如果有新數據,reg 變量將被設置為非零值。 主要為讀取STATUS (27h)的DRDY位。
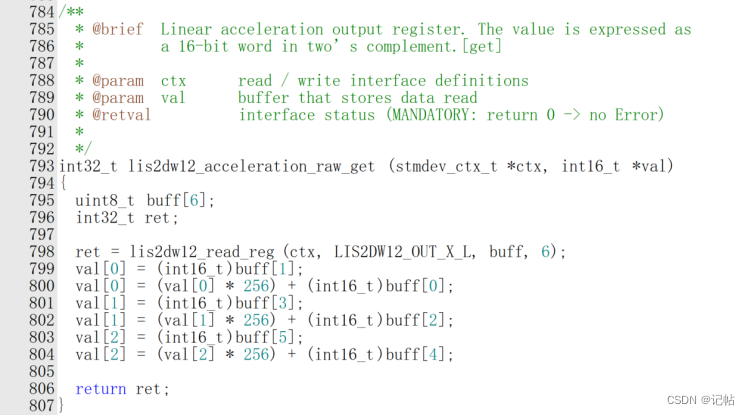
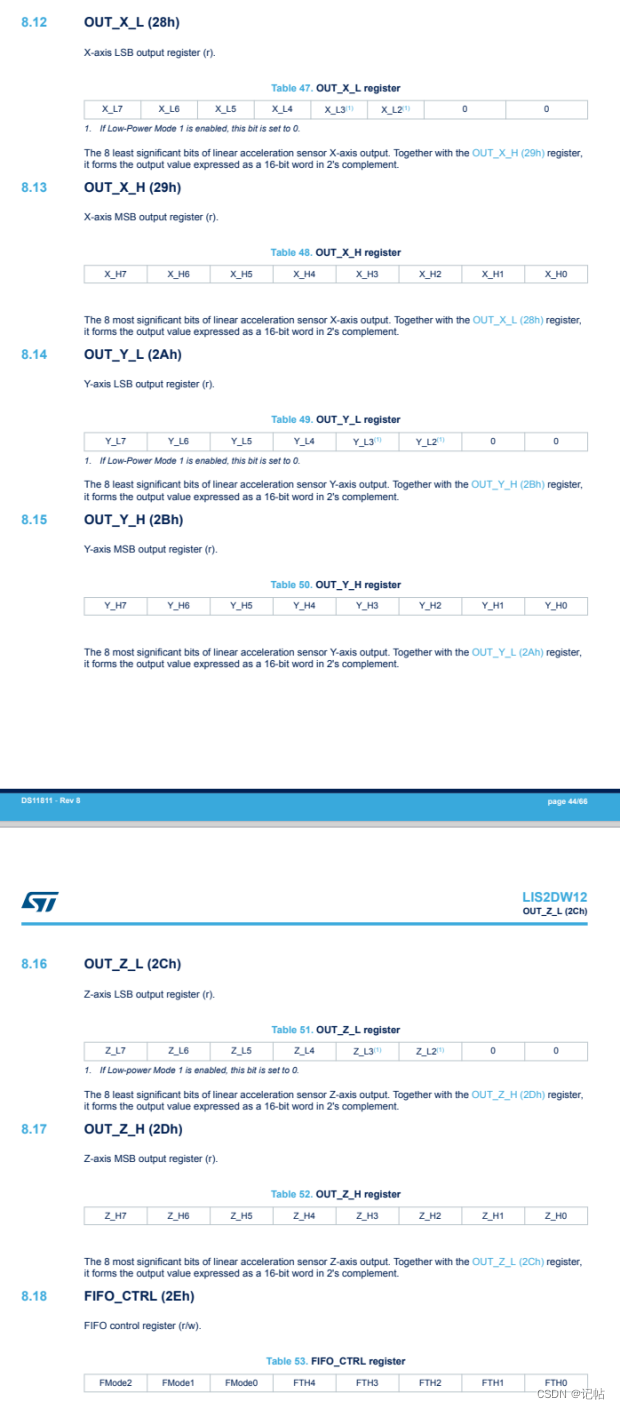
如果 reg 是非零的,說明有新的加速度數據可讀。 lis2dw12_acceleration_raw_get(&dev_ctx, data_raw_acceleration);:這個函數調用實際讀取加速度計的原始數據,并存儲在 data_raw_acceleration 數組中。 數據在28h-2Dh中。
加速度數據首先以原始格式(通常是整數)讀取,然后需要轉換為更有意義的單位,如毫重力(mg)。這里的轉換函數 lis2dw12_from_fs2_to_mg() 根據加速度計的量程(這里假設為±2g)將原始數據轉換為毫重力單位。 acceleration_mg[0] = lis2dw12_from_fs2_to_mg(data_raw_acceleration[0]); 等三行代碼分別轉換 X、Y、Z 軸的加速度數據。

● LIS2DW12 加速度計通常會有一個固定的位分辨率,比如 16 位(即輸出值是一個 16 位的整數)。這意味著加速度計可以輸出的不同值的總數是 2^16=65536。這些值均勻地分布在 -2g 到 +2g 的范圍內。
● 因此,這個范圍(4g 或者 4000 mg)被分成了 65536 個步長。
● 每個步長的大小是 4000 mg/65536≈0.061 mg/LSB
所以,函數中的乘法 ((float_t)lsb) * 0.061f 是將原始的整數值轉換為以毫重力(mg)為單位的加速度值。這個轉換對于將加速度計的原始讀數轉換為實際的物理測量值是必需的。
while (1)
{
uint8_t reg;
/* Read output only if new value is available */
lis2dw12_flag_data_ready_get(&dev_ctx, ®);
if (reg) {
/* Read acceleration data */
memset(data_raw_acceleration, 0x00, 3 * sizeof(int16_t));
lis2dw12_acceleration_raw_get(&dev_ctx, data_raw_acceleration);
//acceleration_mg[0] = lis2dw12_from_fs8_lp1_to_mg(data_raw_acceleration[0]);
//acceleration_mg[1] = lis2dw12_from_fs8_lp1_to_mg(data_raw_acceleration[1]);
//acceleration_mg[2] = lis2dw12_from_fs8_lp1_to_mg(data_raw_acceleration[2]);
acceleration_mg[0] = lis2dw12_from_fs2_to_mg(
data_raw_acceleration[0]);
acceleration_mg[1] = lis2dw12_from_fs2_to_mg(
data_raw_acceleration[1]);
acceleration_mg[2] = lis2dw12_from_fs2_to_mg(
data_raw_acceleration[2]);
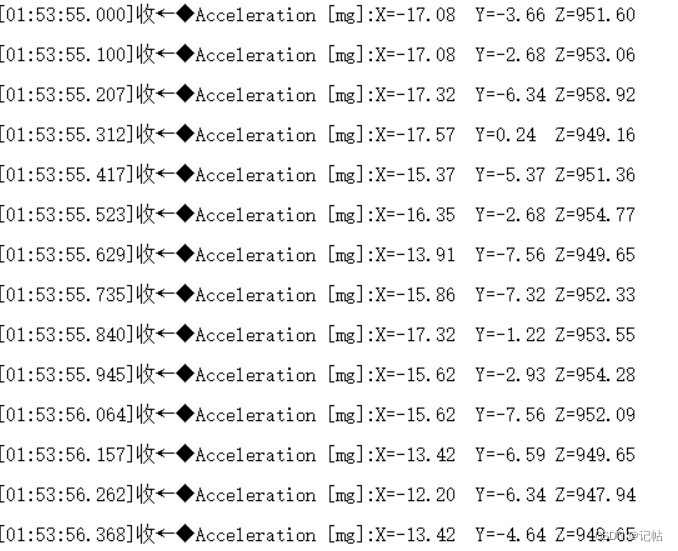
printf("Acceleration [mg]:X=%4.2ftY=%4.2ftZ=%4.2frn",acceleration_mg[0], acceleration_mg[1], acceleration_mg[2]);
}
R_BSP_SoftwareDelay(100, BSP_DELAY_UNITS_MILLISECONDS);
}
演示
審核編輯 黃宇
-
傳感器
+關注
關注
2551文章
51099瀏覽量
753572 -
加速度計
+關注
關注
6文章
702瀏覽量
45897
發布評論請先 登錄
相關推薦
三軸加速度計LIS2DW12開發(2)----基于中斷信號獲取加速度數據
e2studio開發三軸加速度計LIS2DW12(2)----基于中斷信號獲取加速度數據
e2studio開發三軸加速度計LIS2DW12(3)----檢測活動和靜止狀態

e2studio開發三軸加速度計LIS2DW12(4)----測量傾斜度
三軸加速度計LIS2DUX12開發(1)----輪詢獲取加速度數據
e2studio開發三軸加速度計LIS2DW12(1)----輪詢獲取加速度數據

設計具有成本效益的加速度計
LIS2DW12的應用筆記

三軸加速度計LIS2DW12開發(4)----測量傾斜度
e2studio開發三軸加速度計LIS2DW12(2)----基于中斷信號獲取加速度數據
e2studio開發三軸加速度計LIS2DW12(3)----檢測活動和靜止狀態
e2studio開發三軸加速度計LIS2DW12(4)----測量傾斜度





 工商網監
工商網監
評論