") EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(fā)(九)
EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(fā)(九)
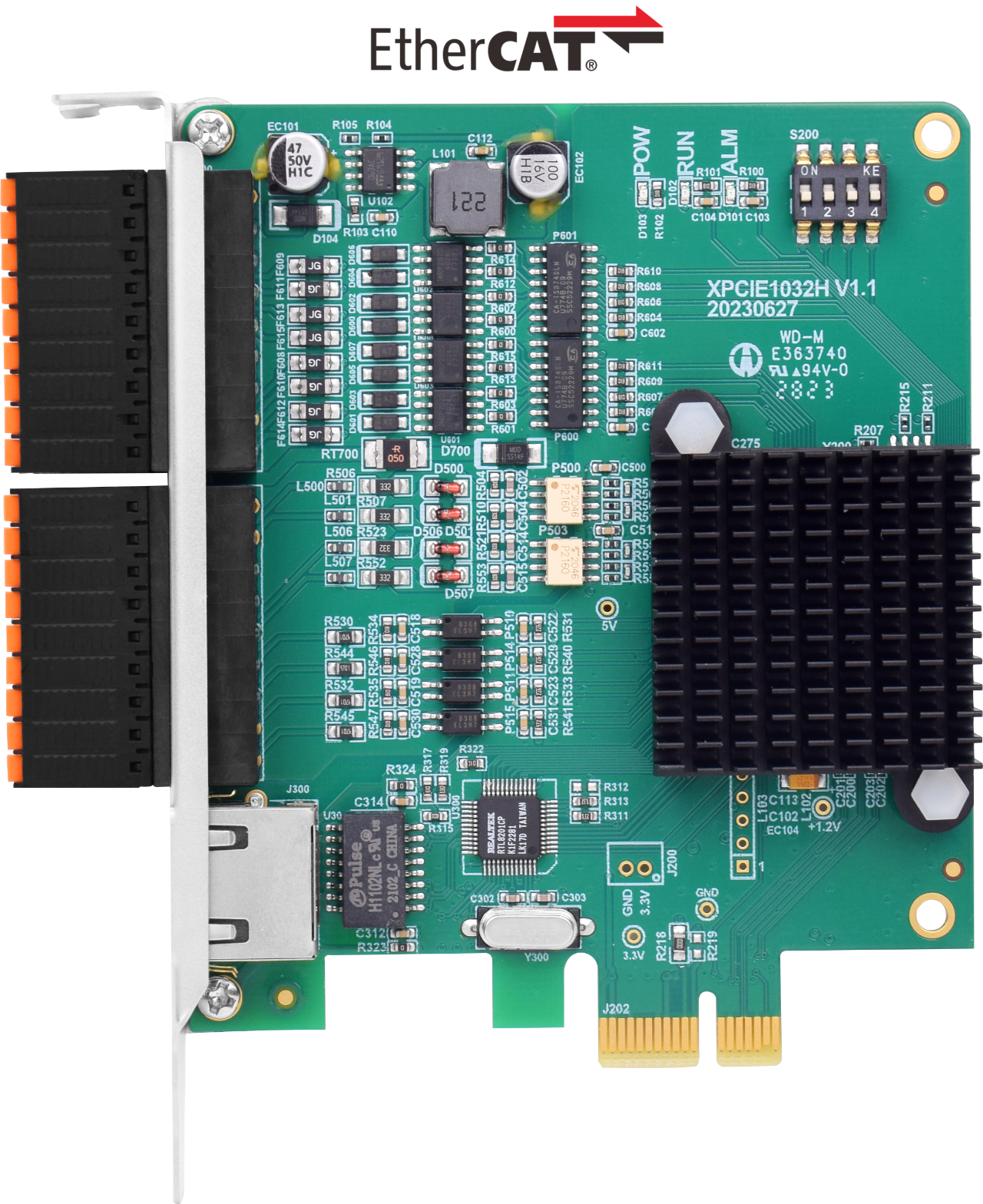
XPCIE1032H功能簡介
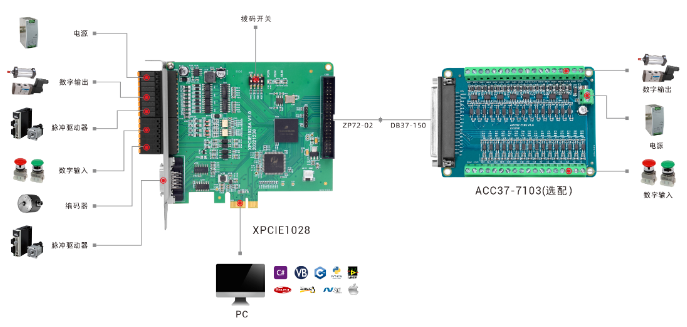
XPCIE1032H是一款基于PCI Express的EtherCAT總線運動控制卡,可選6-64軸運動控制,支持多路高速數(shù)字輸入輸出,可輕松實現(xiàn)多軸同步控制和高速數(shù)據(jù)傳輸。
XPCIE1032H集成了強大的運動控制功能,結合MotionRT7運動控制實時軟核,解決了高速高精應用中,PC Windows開發(fā)的非實時痛點,指令交互速度比傳統(tǒng)的PCI/PCIe快10倍。
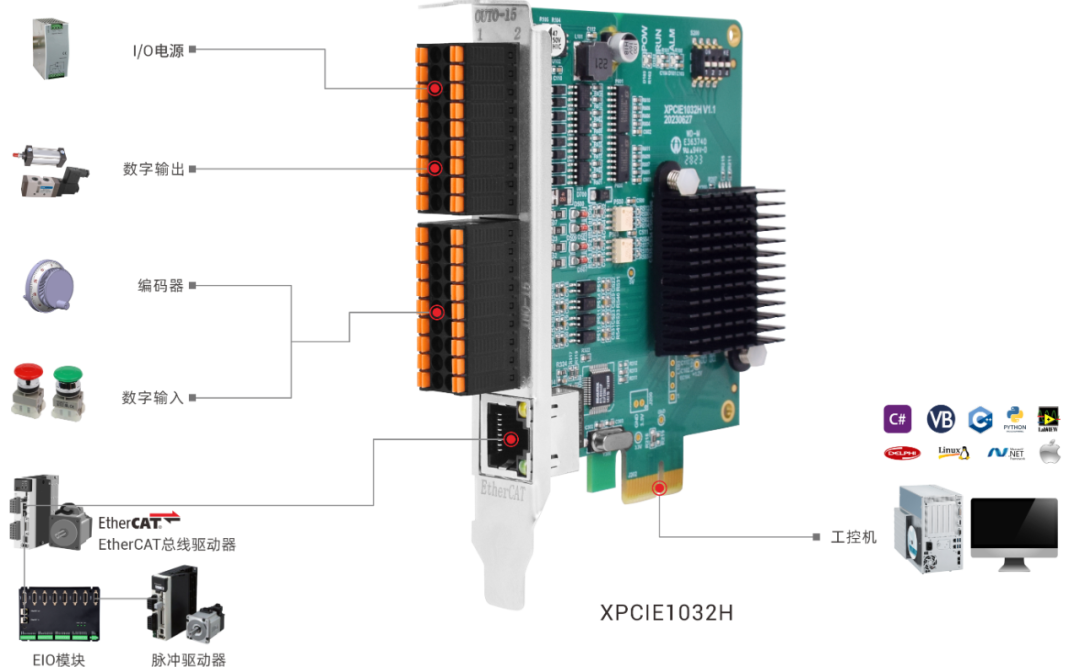
XPCIE1032H支持PWM,PSO功能,板載16進16出通用IO口,其中輸出口全部為高速輸出口,可配置為4路PWM輸出口或者16路高速PSO硬件比較輸出口。輸入口含有8路高速輸入口,可配置為4路高速色標鎖存或兩路編碼器輸入。
XPCIE1032H搭配MotionRT7實時內(nèi)核,使用本地LOCAL接口連接,通過高速的核內(nèi)交互,可以做到更快速的指令交互,單條指令與多條指令一次性交互時間可以達到3-5us左右。
?XPCIE1032H與MotionRT7實時內(nèi)核的配合具有以下優(yōu)勢:
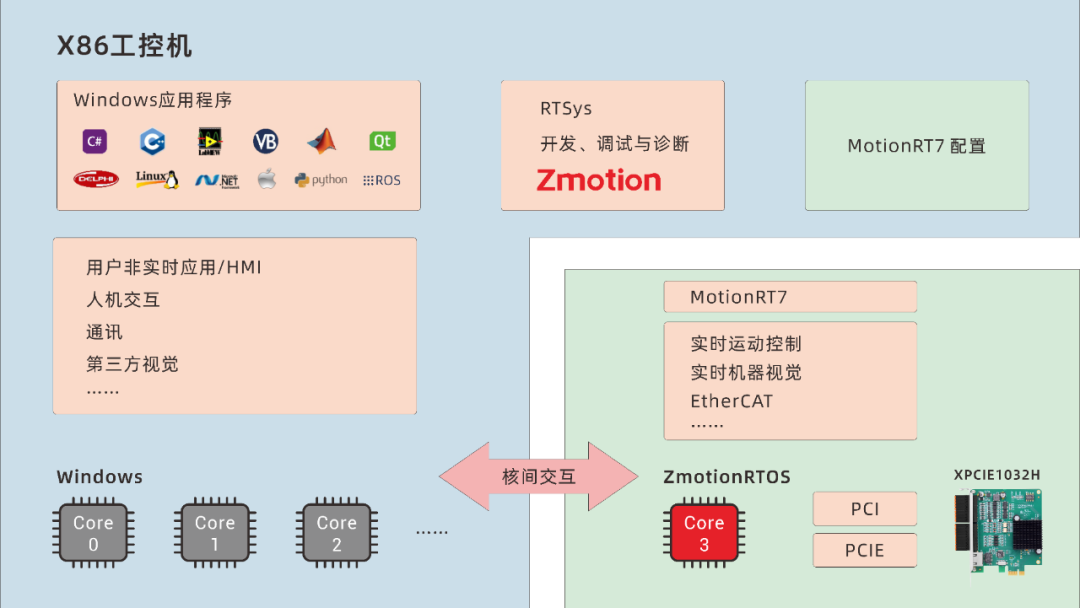
1.支持多種上位機語言開發(fā),所有系列產(chǎn)品均可調(diào)用同一套API函數(shù)庫;
2.借助核內(nèi)交互,可以快速調(diào)用運動指令,響應時間快至微秒級,比傳統(tǒng)PCI/PCIe快10倍;
3.解決傳統(tǒng)PCI/PCIe運動控制卡在Windows環(huán)境下控制系統(tǒng)的非實時性問題;
4.支持一維/二維/三維PSO(高速硬件位置比較輸出),適用于視覺飛拍、精密點膠和激光能量控制等應用;
5.提供高速輸入接口,便于實現(xiàn)位置鎖存;
6.支持EtherCAT總線和脈沖輸出混合聯(lián)動、混合插補。
?使用XPCIE1032H和MotionRT7進行項目開發(fā)時,通常需要進行以下步驟:
1.安裝驅動程序,識別XPCIE1032H;
2.打開并執(zhí)行文件“MotionRT710.exe”,配置參數(shù)和運行運動控制實時內(nèi)核;
3.使用ZDevelop軟件連接到控制器,進行參數(shù)監(jiān)控。連接時請使用PCI/LOCAL方式,并確保ZDevelop軟件版本在3.10以上;
4.完成控制程序開發(fā),通過LOCAL鏈接方式連接到運動控制卡,實現(xiàn)實時運動控制。
?與傳統(tǒng)PCI/PCIe卡和PLC的測試數(shù)據(jù)結果對比:
| 平均值 | C++ LOCAL | C# LOCAL | 傳統(tǒng)PCI/PCIe卡接口交互 | PLC網(wǎng)口通訊交互 |
| 1w次單條讀取交互周期 | 4.70us | 5.3us | 64us | 500us-10ms |
| 10w次單條讀取交互周期 | 3.90us | 5.7us | 65us | 500us-10ms |
| 1w次多條讀取交互周期 | 6.20us | 8.85us | 472us | 500us-10ms |
| 10w次多條讀取交互周期 | 5.50us | 8.37us | 471us | 500us-10ms |
我們可以從測試對比結果看出,XPCIE1032H運動控制卡配合實時運動控制內(nèi)核MotionRT7,在LOCAL鏈接(核內(nèi)交互)的方式下,指令交互的效率是非常穩(wěn)定,當測試數(shù)量從1w增加到10w時,單條指令交互時間與多條指令交互時間波動不大,非常適用于高速高精的應用。 XPCIE1032H控制卡安裝
關閉計算機電源。
打開計算機機箱,選擇一條空閑的XPCIE卡槽,用螺絲刀卸下相應的擋板條。
將運動控制卡插入該槽,擰緊擋板條上的固定螺絲。
一、C#語言進行運動控制項目開發(fā)

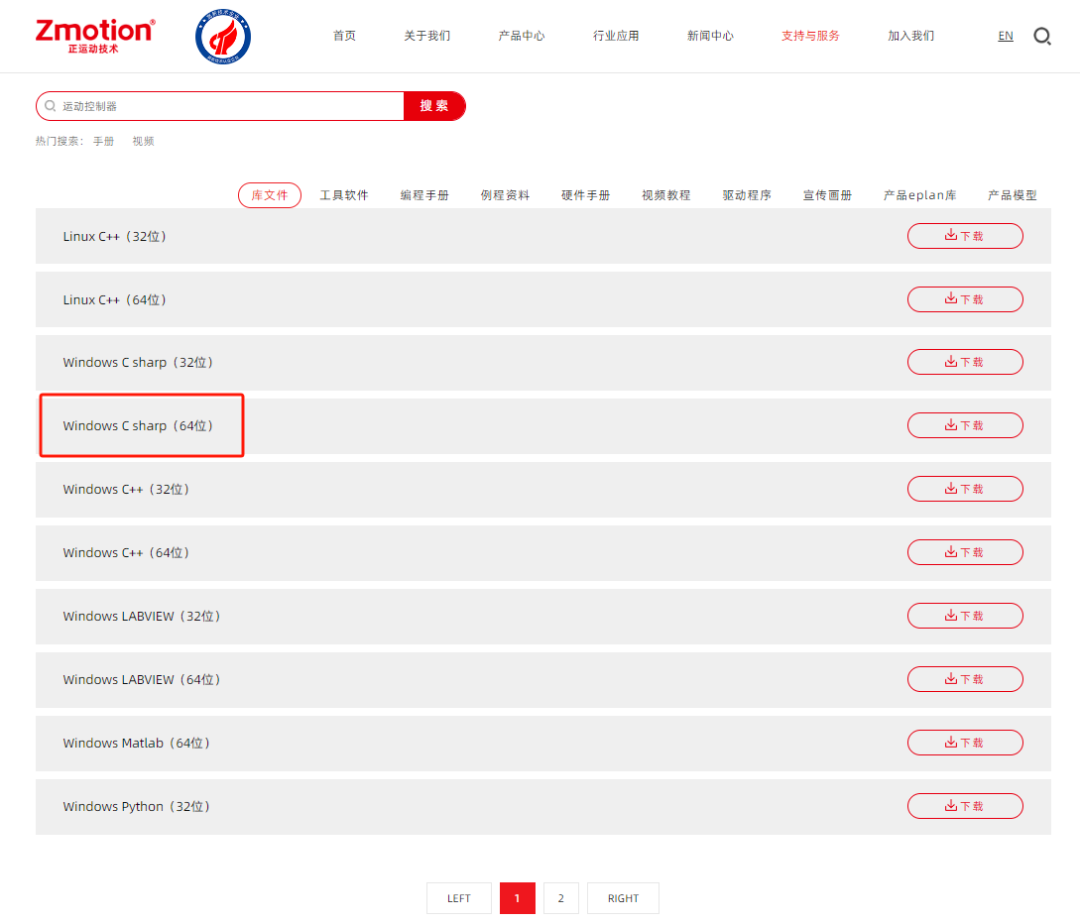
1.到正運動技術官網(wǎng)的下載中心選擇需要的平臺庫文件。
庫文件下載地址:http://www.zmotion.com.cn/download_list_21.html
2.解壓下載的安裝包找到“ Zmcaux.cs ”,“ zauxdll.dll ”,“ zmotion.dll ”放入到項目文件中。
(1)“Zmcaux.cs”放在項目根目錄文件中,與bin目錄同級。
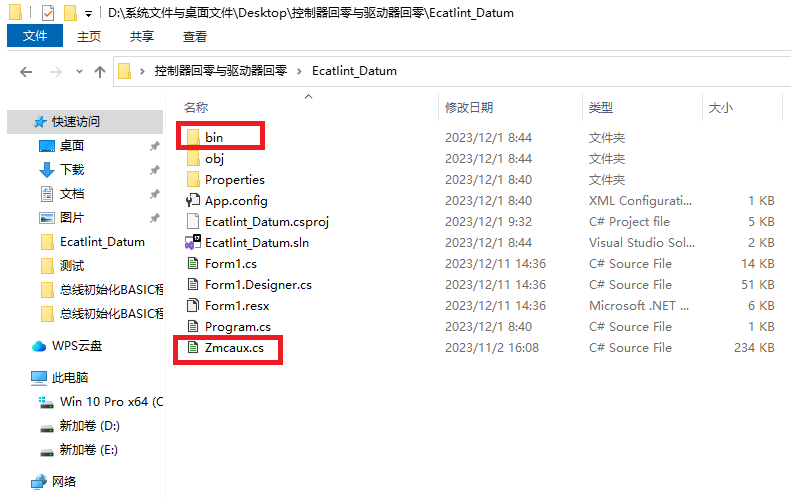
(2)“zauxdll.dll”,“zmotion.dll”放在bin → Debug。

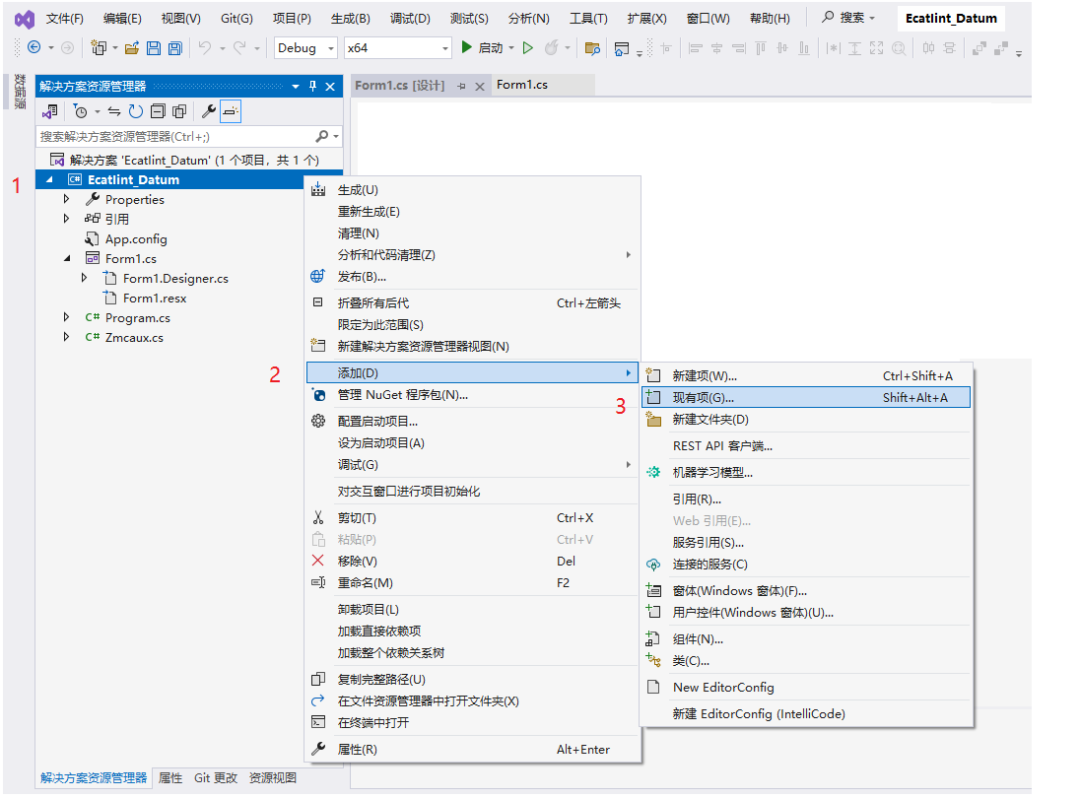
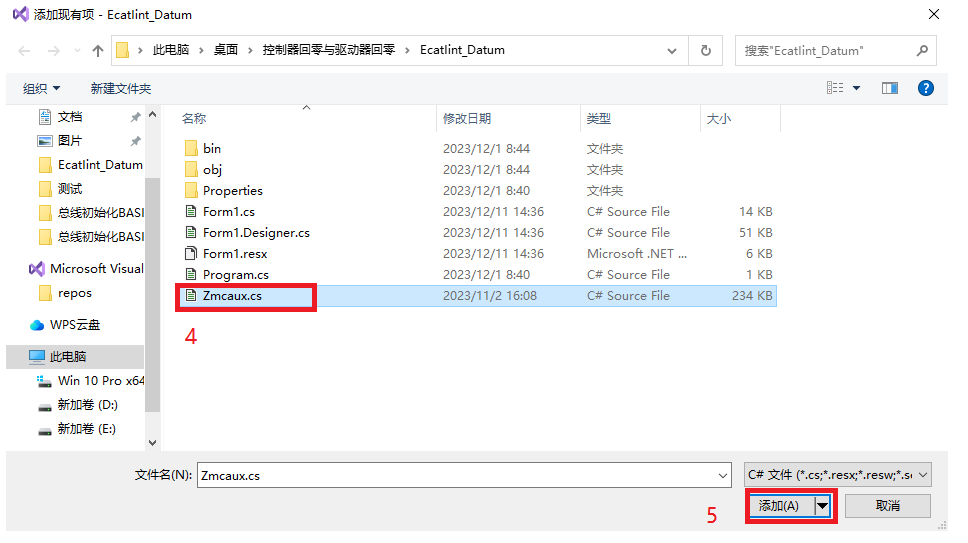
3.用vs打開新建的項目文件,在右邊的解決方案資源管理器中點擊顯示所有,然后鼠標右鍵點擊zmcaux.cs文件,點擊包括在項目中。
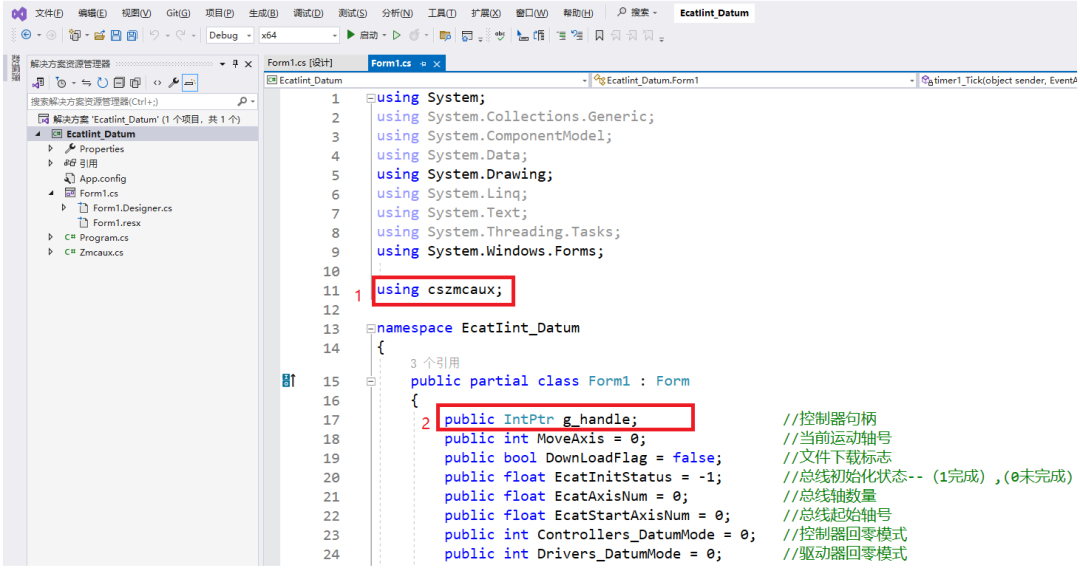
4.雙擊Form1.cs里面的Form1,出現(xiàn)代碼編輯界面,在文件開頭寫入using cszmcaux,并聲明控制器句柄g_handle。
二、PC函數(shù)介紹
相關PC函數(shù)介紹詳情可參考“ZMotion PC函數(shù)庫編程手冊 V2.1.1”。
| 指令11 | ZAux_FastOpen | ||||||||
| 指令原型 | int32 __stdcall ZAux_FastOpen(int type, char *pconnectstring, uint32 uims ,ZMC_HANDLE * phandle) | ||||||||
| 指令說明 | 與控制器建立連接, 可以指定連接的等待時間 | ||||||||
| 輸入?yún)?shù) |
|
||||||||
| 輸出參數(shù) |
|
||||||||
| 返回值 | 成功返回值為0,非0詳見錯誤碼說明。 | ||||||||
| 指令示例 |
串口連接: ZMC_HANDLE phandle;//控制器連接句柄 Char comID[32]= "0";//串口ID ZAux_FastOpen(1, comID,1000 ,&phandle); 網(wǎng)口連接例子: ZMC_HANDLE phandle;//控制器連接句柄 Char EthID[32]= "192.168.0.11";//網(wǎng)口ID ZAux_FastOpen(2, EthID,1000 ,&phandle); LOCAL接口連接例子: ZMC_HANDLE phandle;//控制器連接句柄 ZAux_FastOpen(5, "LOCAL1",1000,&phandle); |
||||||||
| 詳細說明 | type 設置為 5,zmotion.dll 版本要在 3.8.8.50 以上。 |
| 指令103 | ZAux_Direct_Single_Datum | ||||||||||||||||||||
| 指令原型 | int32 __stdcall ZAux_Direct_Single_Datum(ZMC_HANDLE handle, int iaxis, int imode) | ||||||||||||||||||||
| 指令說明 | 單軸回零運動。 | ||||||||||||||||||||
| 輸入?yún)?shù) |
|
||||||||||||||||||||
| 輸出參數(shù) | / | ||||||||||||||||||||
| 返回值 | 成功返回值為0,非0詳見錯誤碼說明。 | ||||||||||||||||||||
| 指令示例 | 單軸回零運動 | ||||||||||||||||||||
| 詳細說明 |
mode:找原點模式,加10表示碰到限位后調(diào)頭反找,不會碰到限位停止,例如13=模式3+限位調(diào)頭反找,用于原點在正中間的情況。
|
| 指令104 | ZAux_BusCmd_Datum | ||||||||
| 指令原型 | int32 __stdcall ZAux_BusCmd_Datum(ZMC_HANDLE handle, uint32 iaxis , uint32 homemode ); | ||||||||
| 指令說明 | 總線驅動器回零 | ||||||||
| 輸入?yún)?shù) |
|
||||||||
| 輸出參數(shù) | / | ||||||||
| 返回值 | 成功返回值為0,非0詳見錯誤碼說明。 | ||||||||
| 指令示例 | / | ||||||||
| 詳細說明 |
設置驅動器回零方式(6098h),缺省0表示使用驅動器當前的回零方式。 會使用軸的SPEED, CREEP, ACCEL, DECEL,乘以UNITS后自動設置驅動器的6099h,609Ah 動作時序: 6098回零方式→6099速度→609A加速度→6060切換當前模式 |
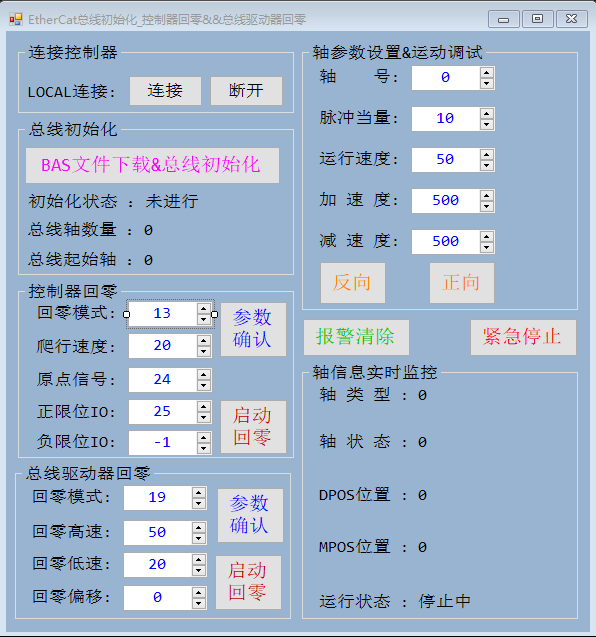
在form設計界面找到需要用到的控件拖拽到窗體中進行UI界面設計,效果如下。
三、相關程序以及設計思路
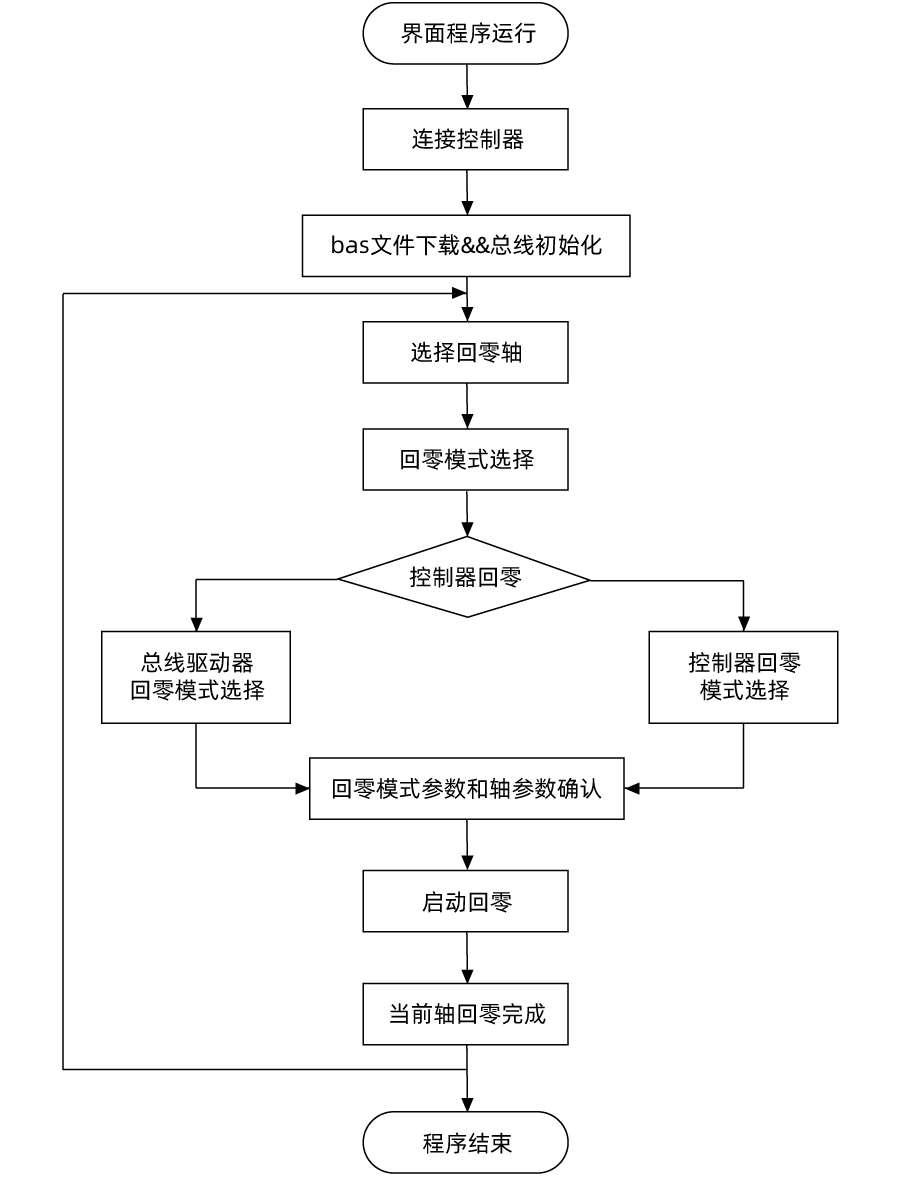
本次設計操作步驟相應的流程圖如下:
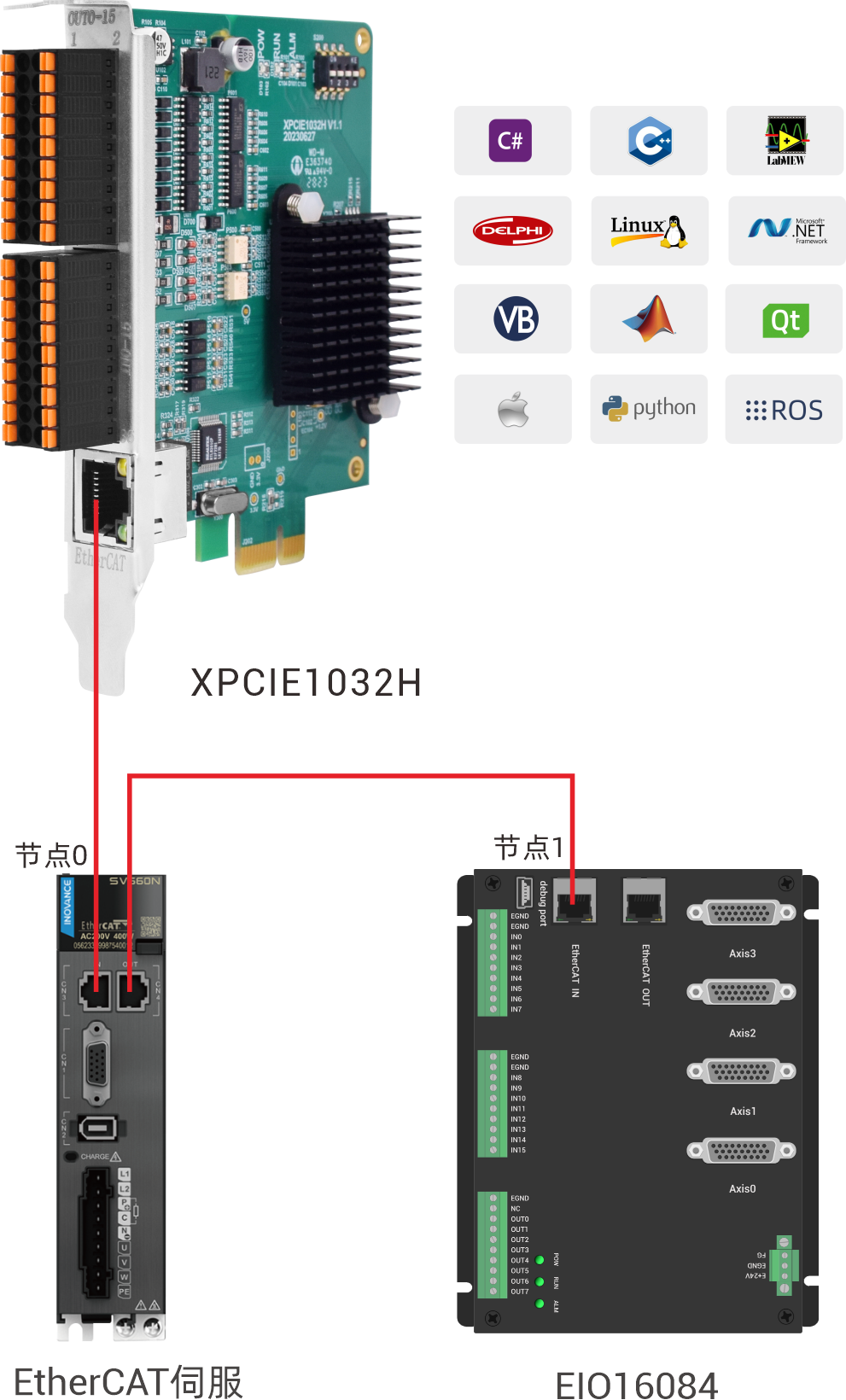
本例程以運動控制卡XPLCIE1032H搭載MotionRT7實時內(nèi)核,通過EthereCAT總線口接節(jié)點0(匯川驅動器-0軸),節(jié)點1(正運動擴展模塊EIO16084)1-4軸映射為總線軸為例:
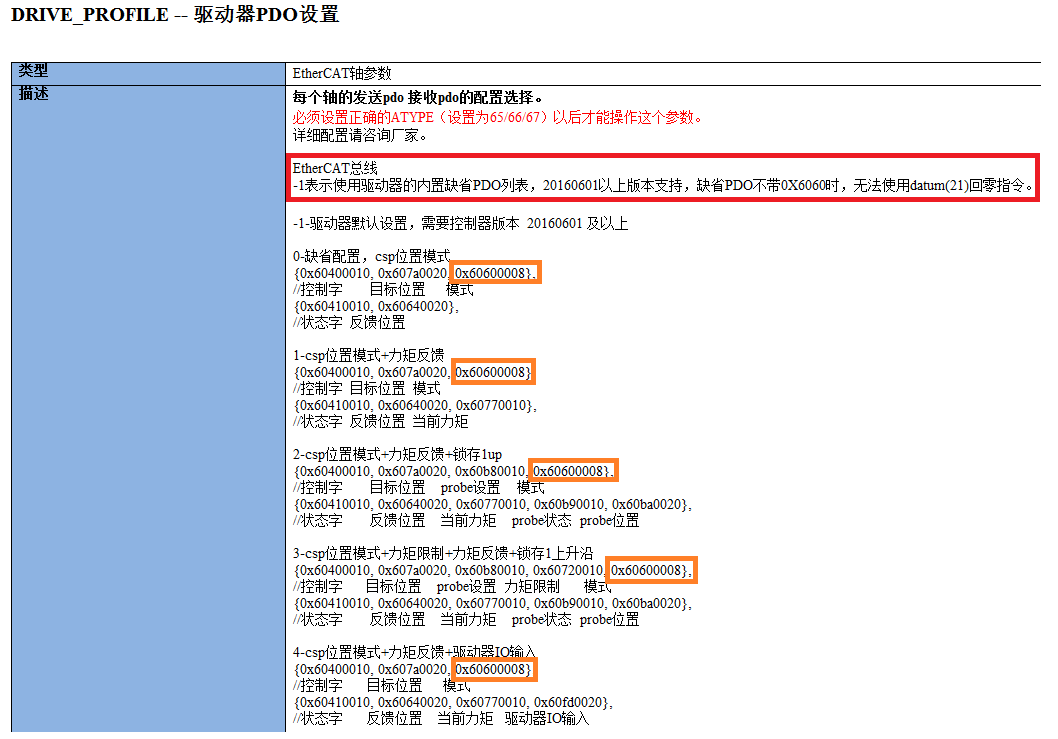
注意:在總線初始化basic程序,驅動器PDO不能設置為-1,因為該PDO列表不含數(shù)據(jù)字典6060,不支持驅動器回零。
關于pdo列表的配置詳細說明,可以查閱basic編程手冊,搜索DRIVE_PROFILE指令。
1、初始化程序執(zhí)行后,通過ZAux_Direct_GetUserVar函數(shù)接口,可以讀取basic程序自定義的變量。
本節(jié)案例獲取的是總線初始化映射軸數(shù)量、總線初始化起始軸號和總線初始化完成狀態(tài)。下圖是事先編輯好的basic程序的自定義變量。
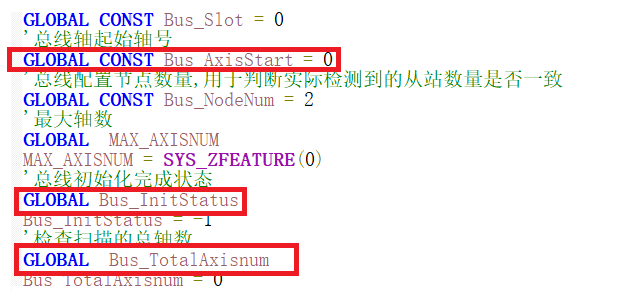
使用定時器將總線軸數(shù)量,總線起始軸號,初始化狀態(tài)等總線初始化信息進行獲取更新。
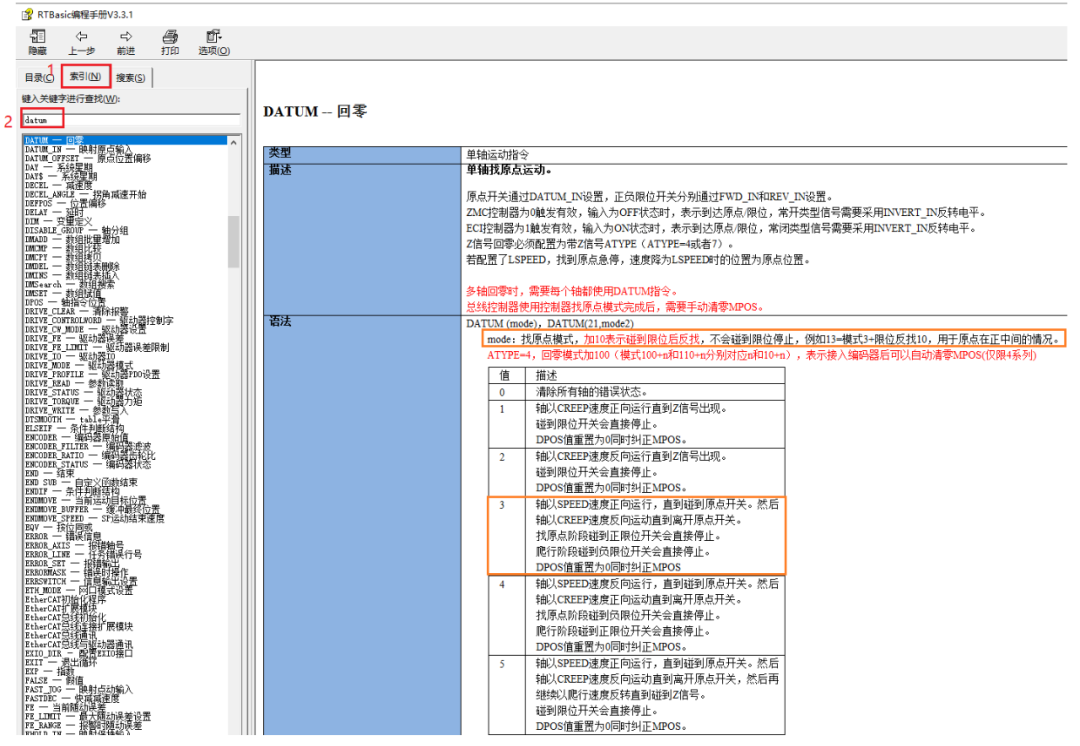
//讀取basic程序自定義變量--總線初始化的總軸數(shù) zmcaux.ZAux_Direct_GetUserVar(g_handle,"Bus_TotalAxisnum",refEcatAxisNum); //讀取basic程序自定義變量--總線初始化的總線起始軸號 zmcaux.ZAux_Direct_GetUserVar(g_handle, "Bus_AxisStart", ref EcatStartAxisNum); //讀取basic程序自定義變量--總線初始化的初始化狀態(tài) zmcaux.ZAux_Direct_GetUserVar(g_handle,"Bus_InitStatus",refEcatInitStatus)2、使用RTsys軟件,點擊軟件菜單欄的幫助→Zbasic幫助→搜索,搜索DATUM指令,選擇回零模式并設置回零模式對應的參數(shù)。
假設回零模式選擇的是13,需要設置原點開關、限位開關、回零速度(SPEED)和爬行速度(CREEP)。
該模式進行回零時軸以SPEED速度正向運行,碰到限位開關會反向查找原點。找到原點后以CREEP速度反向爬行,直到離開原點。
privatevoidControllers_DatumPara_Button_Click(objectsender,EventArgse) { if (g_handle == (IntPtr)0) { MessageBox.Show("未連接到控制器!", "提示"); } else { //軸基本參數(shù)設置,控制器回零的速度是SPEED AxisParaSet(); int[] ret = new int[7]; //設置回零爬行速度 ret[0] = zmcaux.ZAux_Direct_SetCreep(g_handle, MoveAxis, Convert.ToSingle(Datum_Creep_Value.Text)); //配置原點信號。ZMC系列默認OFF時信號有效,常開傳感器需要反轉輸入口為ON ret[1] = zmcaux.ZAux_Direct_SetDatumIn(g_handle, MoveAxis, Convert.ToInt32(DatumIO_Value.Text)); ret[2] = zmcaux.ZAux_Direct_SetInvertIn(g_handle, Convert.ToInt32(DatumIO_Value.Text), 1); //正硬限位IO設置 ret[3] = zmcaux.ZAux_Direct_SetFwdIn(g_handle, MoveAxis, Convert.ToInt32(FWD_IO_Value.Text)); ret[4] = zmcaux.ZAux_Direct_SetInvertIn(g_handle, Convert.ToInt32(FWD_IO_Value.Text), 1); //負硬限位IO設置 ret[5] = zmcaux.ZAux_Direct_SetRevIn(g_handle, MoveAxis, Convert.ToInt32(REV_IO_Value.Text)); ret[6] = zmcaux.ZAux_Direct_SetInvertIn(g_handle, Convert.ToInt32(REV_IO_Value.Text), 1); //設置控制器回零模式 Controllers_DatumMode = Convert.ToInt32(Controllers_DatumMode_Value.Text); //定義臨時的變量記錄各個函數(shù)的返回值 int FinalRet = -1; for(int i = 0; i < 7; ++i) { FinalRet *= ret[i]; } if (FinalRet == 0) //說明所有函數(shù)的返回值都是0,回零等參數(shù)均設置成功 { MessageBox.Show("控制器回零參數(shù)設置成功!", "提示"); } else { MessageBox.Show("控制器回零參數(shù)設置失敗!", "提示"); } } }3、使用ZAux_Direct_Single_Datum函數(shù),函數(shù)語法如下:
語法:ZAux_Direct_Single_Datum(連接句柄,軸號,控制器回零模式)
選擇回零的軸號,模式以及設置完參數(shù),確認參數(shù)按鈕然后點擊回零按鈕,此時軸以控制器回零參數(shù)進行回零。
privatevoidControllers_Datum_Button_Click(objectsender,EventArgse)
{
if (g_handle == (IntPtr)0)
{
MessageBox.Show("未連接到控制器!", "提示");
return;
}
int ret = -1;
//觸發(fā)示波器
zmcaux.ZAux_Trigger(g_handle);
//控制器回零
ret = zmcaux.ZAux_Direct_Single_Datum(g_handle, MoveAxis, Controllers_DatumMode);
if(ret != 0)
{
MessageBox.Show("控制器回零啟動失敗!", "提示");
}
else
{
MessageBox.Show("控制器回零啟動成功!", "提示");
}
}
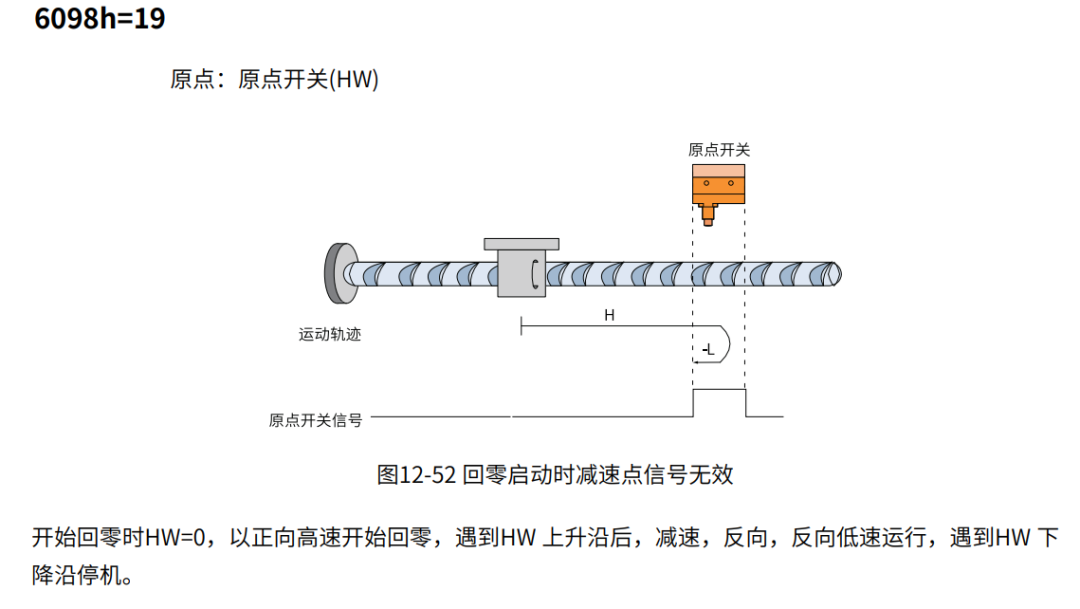
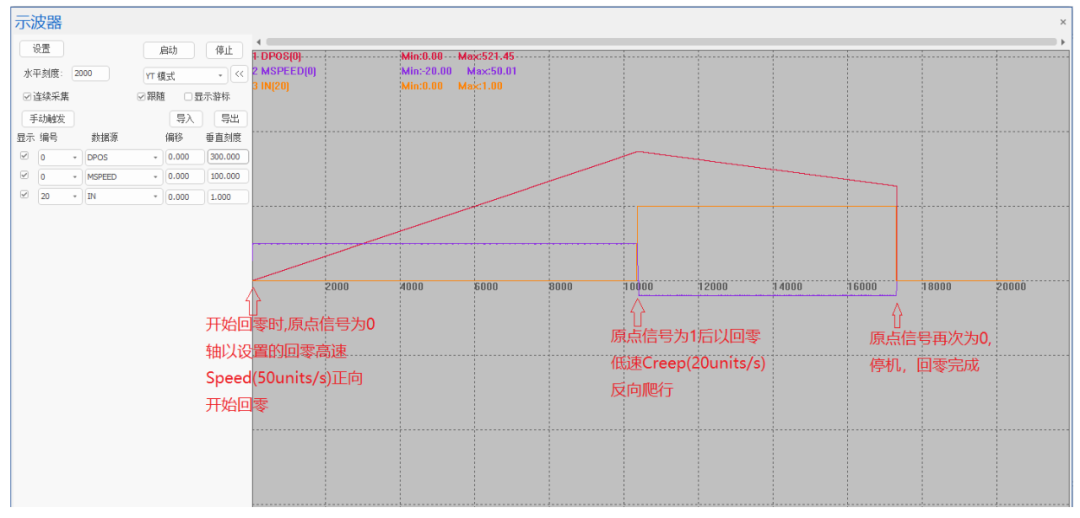
4、查閱驅動器手冊→回零模式介紹,選擇驅動器支持的回零模式(數(shù)據(jù)字典6098),然后設置該回零模式的回零高速,回零低速等參數(shù)。
在本次例程選擇的是模式19,開始回零時原點開關(HW)為0,以設置的回零高速Speed(50units/s)正向開始回零,遇到原點開關(HW)為1后以回零低速Creep(20units/s)反向爬行,直到原點開關(HW)為0時停機,回零完成。
privatevoidDrivers_DatumPara_Button_Click(objectsender,EventArgse)
{
if (g_handle == (IntPtr)0)
{
MessageBox.Show("未連接到控制器!", "提示");
return;
}
int ret1, ret2, ret3;
//設置驅動器回零高速
ret1 = zmcaux.ZAux_Direct_SetSpeed(g_handle, MoveAxis, Convert.ToSingle(Datum_HighSpeed_Value.Text));
//設置驅動器回零低速
ret2 = zmcaux.ZAux_Direct_SetCreep(g_handle, MoveAxis, Convert.ToSingle(Datum_LowSpeed_Value.Text));
//設置驅動器回零偏移
ret3 = zmcaux.ZAux_BusCmd_SetDatumOffpos(g_handle, (uint)MoveAxis, Convert.ToSingle(Datum_OffSet_Value.Text));
//設置驅動器回零模式
Drivers_DatumMode = Convert.ToInt32(Drivers_DatumMode_Value.Text);
if (ret1 == 0 && ret2 == 0 && ret3 == 0)
{
MessageBox.Show("驅動器回零參數(shù)設置成功!", "提示");
}
else
{
MessageBox.Show("驅動器回零參數(shù)設置失敗!", "提示");
}
}
5、使用ZAux_BusCmd_Datum函數(shù),函數(shù)語法如下:
語法:ZAux_BusCmd_Datum(連接句柄,軸號,驅動器回零模式)
選擇回零的軸號,模式以及設置完參數(shù),確認參數(shù)按鈕然后點擊回零按鈕,此時軸以驅動器回零參數(shù)進行回零。
privatevoidDrivers_Datum_Button_Click(objectsender,EventArgse)
{
if (g_handle == (IntPtr)0)
{
MessageBox.Show("未連接到控制器!", "提示");
return;
}
int ret = -1;
//觸發(fā)示波器
zmcaux.ZAux_Trigger(g_handle);
//驅動器回零
ret = zmcaux.ZAux_BusCmd_Datum(g_handle, (uint)MoveAxis, (uint)Drivers_DatumMode);
if (ret != 0)
{
MessageBox.Show("驅動器回零啟動失敗!", "提示");
}
else
{
MessageBox.Show("驅動器回零啟動成功!", "提示");
}
}
四、運行效果
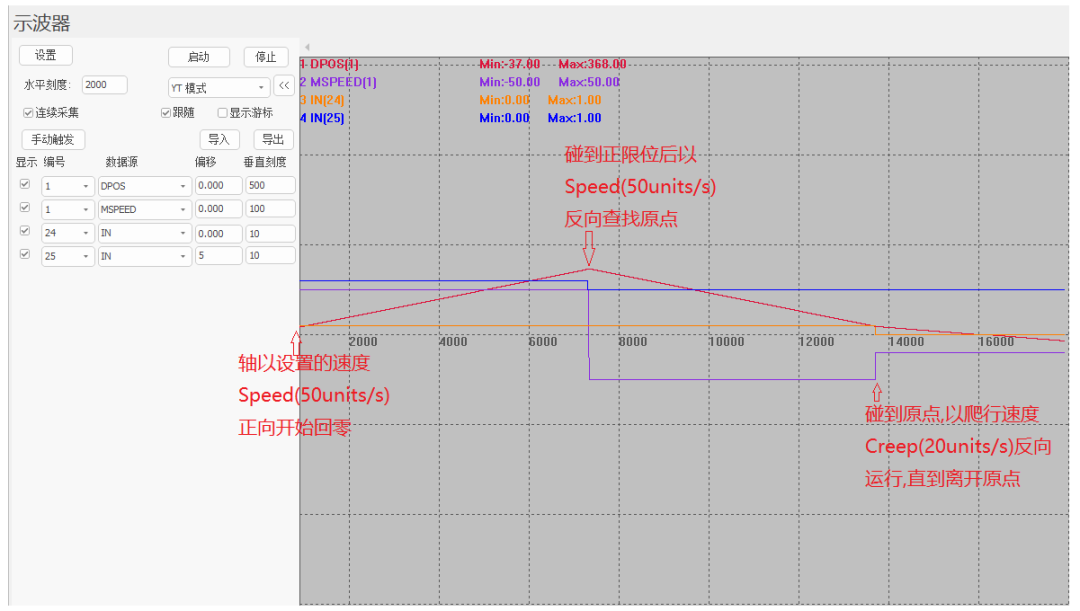
打開RTsys編程軟件,通過Local連接到控制器,同步上位機的軸等等參數(shù)。然后在工具欄→示波器界面,打開示波器觀察波形。
選擇好數(shù)據(jù)源和編號,點擊啟動;在上位機界面點擊回零按鈕,回到RTsys軟件點擊手動觸發(fā),觀察對應回零模式的波形。

⊙控制器回零:以模式13(軸以SPEED速度正向運行,碰到限位開關會反向查找原點。找到原點后以Creep速度反向爬行,直到離開原點)為例,抓取的圖形如下。
⊙總線驅動器回零:查閱驅動器手冊,選擇驅動器支持的回零模式。
這里以模式19為例,回零啟動時,原點信號為0,以回零高速(50units/s)正向回零運行;當原點信號為1時以回零低速Creep(20units/s)反向爬行;再次遇到下降沿將停機,回零完成。
EtherCAT驅動器與控制器回零例程演示。
審核編輯:劉清
-
驅動器
+關注
關注
52文章
8236瀏覽量
146355 -
控制器
+關注
關注
112文章
16361瀏覽量
178030 -
PCI
+關注
關注
4文章
666瀏覽量
130268 -
運動控制
+關注
關注
4文章
581瀏覽量
32869 -
上位機
+關注
關注
27文章
942瀏覽量
54810 -
ethercat
+關注
關注
18文章
690瀏覽量
38699 -
EtherCAT總線
+關注
關注
5文章
72瀏覽量
5383
原文標題:EtherCAT驅動器回零與控制器回零:EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(fā)(九)
文章出處:【微信號:伺服與運動控制,微信公眾號:伺服與運動控制】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦
EtherCAT運動控制卡XPCIE1032H上位機開發(fā)(一):驅動安裝

單軸PSO視覺飛拍與精準輸出:EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(fā)(七)

EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(fā)(十三)
EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(fā)(十四)



EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(fā)(二):EtherCAT總線初始化
EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(fā)(三):EtherCAT總線模式切換

EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(fā)(五):通過RTSys進行調(diào)試與診斷
不止10倍提速!PCIe EtherCAT實時運動控制卡XPCIE1032H 等您評測!

EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(fā)(一):驅動安裝與建立連接
EtherCAT超高速實時運動控制卡(二):EtherCAT總線初始化

EtherCAT驅動器回零與控制器回零:EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(fā)(九)
EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(fā)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論