 自動駕駛領域的數據集匯總
自動駕駛領域的數據集匯總
來源:3D視覺工坊
1. 寫在前面
發自動駕駛論文哪少的了數據集,今天筆者將為大家推薦一篇最新的綜述,總結了200多個自動駕駛領域的數據集,大家堆工作量的時候也可以找一些小眾的數據集刷榜~
下面一起來閱讀一下這項工作
2. 摘要
近年來,隨著硬件和深度學習方法的發展,自動駕駛技術得到了快速發展,并表現出良好的性能。高質量的數據集是開發可靠的自動駕駛算法的基礎。以前的數據集調查試圖審查數據集,但要么集中在有限的數量上,要么缺乏對數據集特征的詳細調查。為此,我們從多個角度對超過200個自動駕駛數據集進行了詳盡的研究,包括傳感器模態、數據大小、任務和上下文條件。我們引入了一個新的度量來評估每個數據集的影響,這也可以作為建立新數據集的指南。我們進一步分析了數據集的標注過程和標注質量。此外,我們對幾個重要數據集的數據分布進行了深入分析。最后,討論了未來自動駕駛數據集的發展趨勢。
3. 和其他綜述的對比
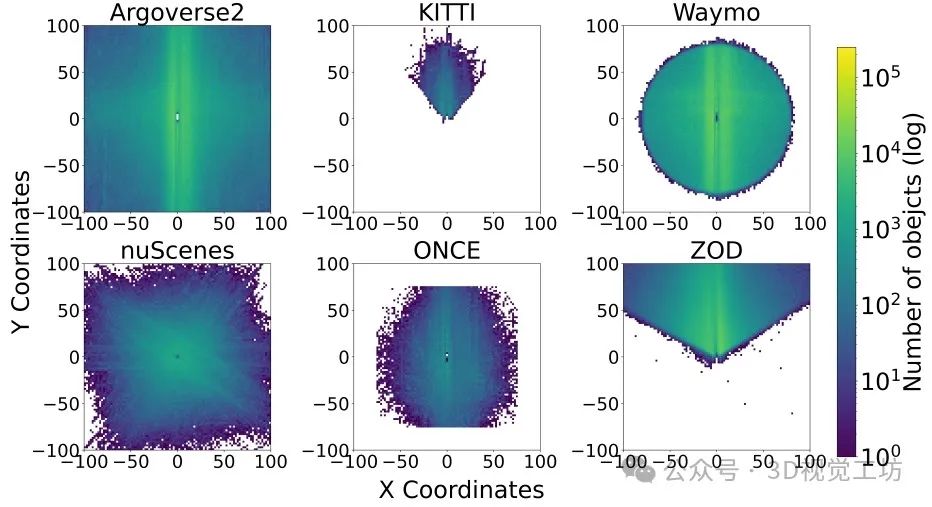
先看一下主流數據集的BEV對象分布。每個熱力圖對應一個以X和Y坐標繪制的數據集,Y是自車的行駛方向。每個數據集特有的標注特征體現在邊界框的分布范圍、密度和數量上。
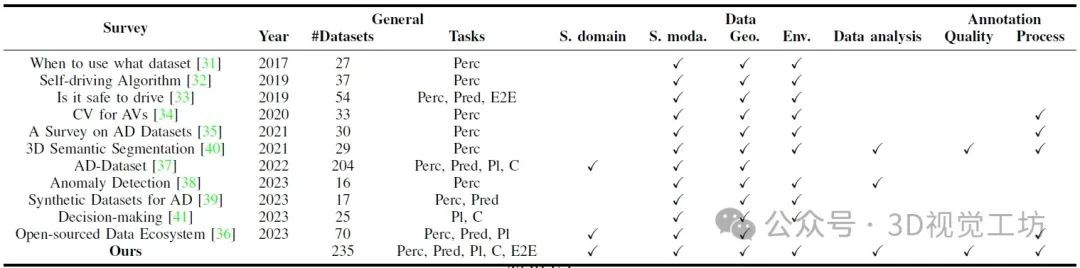
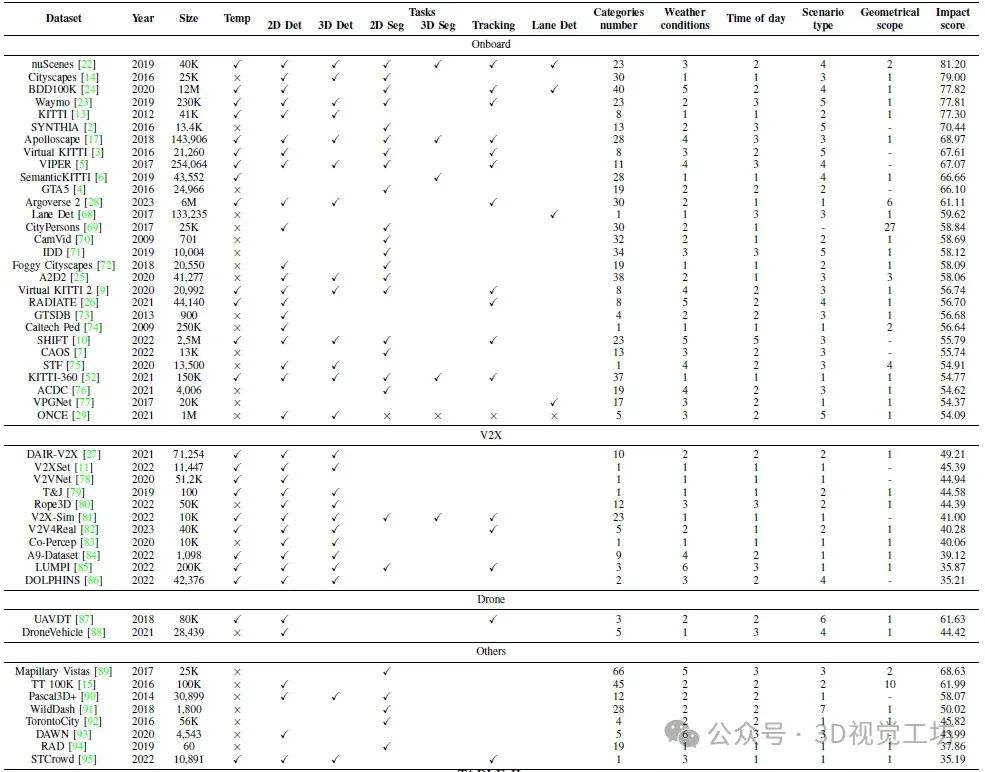
和其他數據集綜述的對比:包括收集的數據集數量(Dataset )、相關任務(Tasks)、傳感域( S.domain )、傳感器模態( S.Moda . )、幾何條件( Geo . )、環境條件( Env . )、數據分布(Data Analysis)、標注質量和過程。任務類型用粗粒度來描述,包括感知( Perc . )、預測( Pred . )、規劃( PL . )、控制( C . )、端到端 ( E2E )。
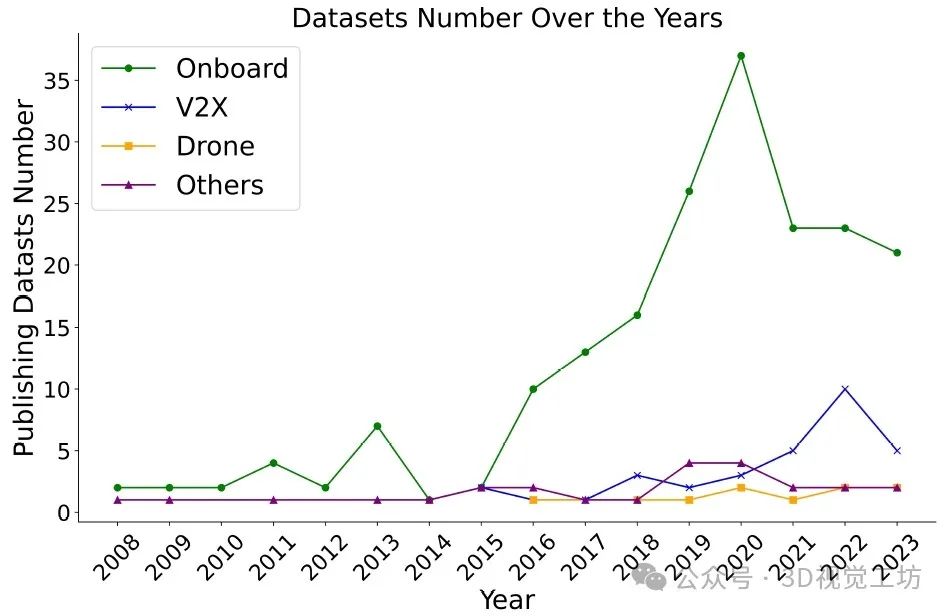
總結了自動駕駛數據集發布的趨勢。自動駕駛數據集在2015年至2020快速增長,然后緩慢下降。相比之下,V2X數據集有增加的趨勢,顯示了協作感知系統的研究趨勢。
4. 文章結構
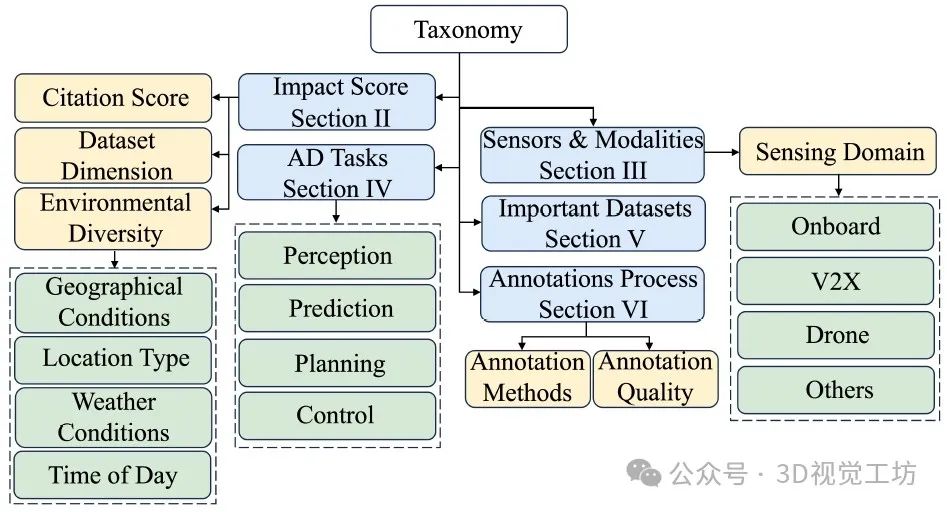
這篇綜述主要分類包括影響評分、傳感器和模態、自動駕駛任務、重要數據集和標注過程。
自動駕駛任務中使用傳感器的模態總結。
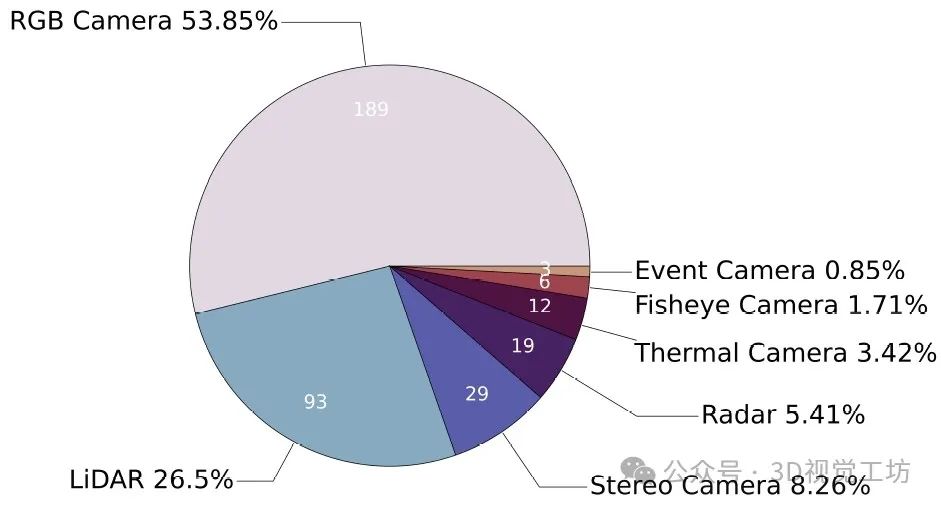
傳感器數量分布,RGB相機和激光雷達是自動駕駛數據集中使用最多的傳感器。
自動駕駛pipeline總結:自動駕駛系統可以分為兩種類型:基于模塊的和端到端的。
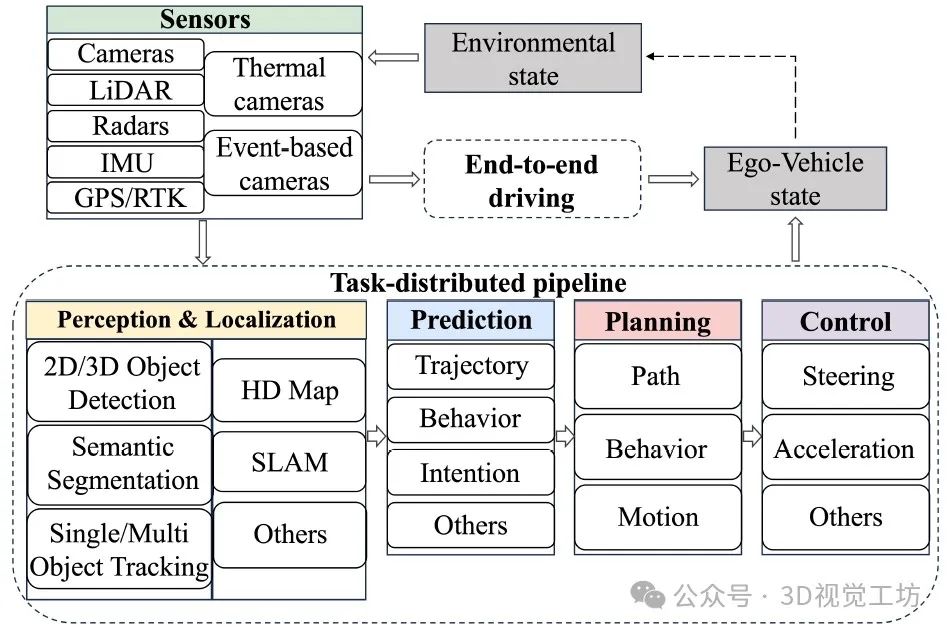
自動駕駛任務的總結。
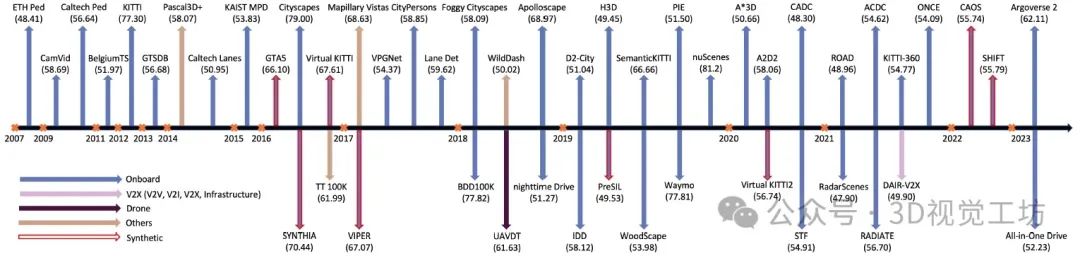
2007年到2023年的數據集發布的時間線。
高影響感知數據集的總結。
5. 總結
這篇文章對200多個現有的自動駕駛數據集進行了全面系統的回顧和分析。從與自動駕駛數據集相關的傳感器類型和模態、感知域和任務入手。為了驗證感知數據集的影響力和重要性,引入了一個新的評價指標- -影響評分。之后展示了幾個涉及感知、預測、規劃、控制和端到端自動駕駛的高影響力數據集。還對自動駕駛數據集的標注方法進行了說明,并對影響標注質量的因素進行了研究。
審核編輯:湯梓紅
-
數據集
+關注
關注
4文章
1208瀏覽量
24703 -
自動駕駛
+關注
關注
784文章
13812瀏覽量
166461 -
深度學習
+關注
關注
73文章
5503瀏覽量
121170
原文標題:200+自動駕駛數據集匯總!
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論