 運動控制的三種控制方式
運動控制的三種控制方式
來源:巷控
非標項目中有非常多的運動控制,根據系統配置、電機類型以及精度需求的不同主要有三種控制方式:開環控制、半閉環控制、全閉環控制。
全閉環控制(Closed-Loop Control)是最可靠的閉環形式,當需要高精度時,請使用全閉環控制。使用線性編碼器直接讀取機器(工件或工作臺)的位置并將讀取的位置與命令值(目標值)進行比較,從而控制電機。因此,無需補償電機與機械系統之間的齒輪齒隙、進給螺桿螺距誤差或因進給螺桿扭轉或膨脹引起的誤差。
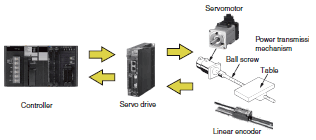
半閉環控制(Semi Closed-Loop Control)和全閉環控制最大的區別就是檢測器的安裝位置。編碼器或其他檢測器連接在電機后面,編碼器檢測進給絲杠(滾珠絲杠)的旋轉角度,并將其作為機器(工件或工作臺)行進位置的反饋,這意味著不能直接檢測到機器的位置。這里有一個誤區,就是很多人認為使用了伺服電機就是全閉環控制,雖然伺服電機自身是閉環系統,但是在運動控制中,沒有直接檢測運動部件的檢測器接到控制器上頂多只能算半閉環控制。如果連編碼器的反饋都沒接到控制器上,雖然使用了伺服電機,也只是開環控制,伺服電機的閉環跟控制無關。

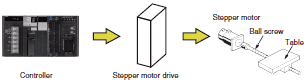
開環控制(Open-Loop Control)一般是使用步進電機代替伺服電機,沒有反饋編碼器,整體結構簡單,可以較低成本的進行定位控制,但是無法補償齒輪和滾珠絲杠的背隙和螺距誤差。當步進電機失速時可能產生丟步,命令值與實際運動之間會產生誤差。因此,開環控制僅適用于低精度、低速和較小負載變化的應用。
審核編輯:湯梓紅
-
電機
+關注
關注
142文章
9020瀏覽量
145481 -
運動控制
+關注
關注
4文章
581瀏覽量
32870 -
開環控制
+關注
關注
2文章
29瀏覽量
5117
原文標題:運動控制——開環、半閉環、全閉環
文章出處:【微信號:旺材伺服與運動控制,微信公眾號:旺材伺服與運動控制】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦


變頻器的三種控制方式 | 變頻器三種控制方式的優缺點






 工商網監
工商網監
評論