 自主移動機器人的電源和電機控制解決方案
自主移動機器人的電源和電機控制解決方案
和電機控制解決方案
自主移動機器人(AMR)為不同領域和行業帶來了諸多優勢,包括提高了安全性和效率。然而,為了使AMR能夠安全、獨立地工作,這些復雜的系統需要精心集成多項技術,像是電源和運動控制這兩個重要組件便至關重要。本文將為您介紹AMR的設計注意事項,以及由安森美(onsemi)所提供的相應解決方案。
AMR的電源與電機控制子系統
扮演關鍵角色
AMR具備和自動駕駛汽車類似的性能,是由一系列子系統構成的復雜設計,機器人能夠在盡可能少的人類交互下,安全地移動、觀測和運行。要打造靈活而智能的AMR,電源和運動控制技術發揮的作用很關鍵。隨著時間推移,單個系統和組件的選擇可對這些先進方案的性能與可靠性產生顯著影響。
首先,AMR中使用的電源系統和電源組件會對其總電池壽命和工作時長產生重大影響。為AMR設計電源系統時需要考慮能量密度、電壓和電流要求、效率、方案尺寸等重要的性能特征和參數。
AMR通常使用鋰離子電池,因為此類電池的能量密度高,使用時間長。同時,電源管理單元可調節從電池到其他組件的功率流。電壓和電流水平通過開關轉換器和穩壓器進行控制。AMR中的電池管理系統可監控電池的狀態、電量、溫度和電流,以確保AMR安全高效地運行,而車載電池充電器的規格取決于電池類型、容量和電壓。智能電源模塊為電機控制系統提供高功率開關,IPM中的功率開關配有柵極驅動器,用于提供相應的信號來打開和關閉開關,功率因數校正(PFC)控制器則可提升電源系統的總效率。
其次,在AMR中,電機驅動型執行器用于移動機器手臂和輪子,因此其選擇至關重要。AMR需要采用效率高且緊湊輕便的高扭矩和高速執行器。選擇執行器時,需要對無刷直流(BLDC)電機、電機控制器、MOSFET、通用控制器板(UCB)和柵極驅動器等組件進行評估。
與有刷電機相比,BLDC電機具有多個優勢。BLDC電機的效率高、噪聲低且高度可靠,可以減少維護工作,因此被廣泛應用于AMR中。然而,控制此類電機需要復雜的算法和適當的驅動器,其中的三相BLDC電機則廣泛用于機器人和工業驅動器。
電機控制器的功能是精確控制AMR執行器中的電機。這些器件可通過嵌入式控制算法來完全集成,也可使用運行電機控制算法的專用微控制器單元(MCU)。AMR中常見的三相電機則是由功率晶體管使用脈寬調制(PWM)開-關信號驅動。這些開關可由硅或寬禁帶材料制成,比如碳化硅(SiC)或氮化鎵(GaN)。
可靠的智能電源與電機控制解決方案
安森美提供了眾多可靠的智能電源、電機控制和傳感方案,最大程度簡化了設計的復雜度,為客戶的設計提供堅實的基礎。從強固、高分辨率的成像系統,到高功率電機控制,再到高效率、緊湊型電池充電方案,這些子系統方案都是建立在安森美深耕汽車行業數十年的經驗技術之上。安森美的系列方案能夠簡化開發流程,并讓AMR即使身處最嚴苛的工作環境也能夠快速適應、可靠運行。
針對電源應用方面,安森美推出多種PFC控制器非常適合AC-DC電源應用,比如圖騰柱無橋PFC前端或基于LLC諧振拓撲的DC-DC級。它們還適用于高電壓DC-DC功率級,可在AMR中實現高效率和高密度快速電池充電器設計。
在BLDC電機控制解決方案方面,安森美提供包括ECS640A ecoSpin電機控制器UCB、NCP81075柵極驅動器,以及可用于加速AMR執行器開發的電源板。
UCB是基于Xilinx Zynq-7000 SoC的系統級模塊(SoM),非常適合精密應用,也可用于先進的人工智能(AI)。此外,安森美提供基于屏蔽柵極溝槽技術的MOSFET(30V至150V),并提供u8FL、SO8-FL、雙面冷卻和頂部冷卻等封裝選項。
基于T10技術的全新30-40V和80V MOSFET支持低壓與中壓應用,T10器件分為兩大類別,分別用于電源轉換和電機控制。用于電機控制的T10M器件提供出色的導通電阻,UIS能力提高10%,并具有優異的體二極管軟恢復性能,可降低電壓尖峰并解決EMI問題。
對于高功率應用中的三相BLDC電機,安森美推薦使用基于PTNG技術的MOSFET(80 V、100 V、120 V和150 V),而NTMTSC1D6N10MC、NTMTSC4D3N15MC、NTBLS1D5N10MC和NTBLS4D3N15MC MOSFET可滿足高性能應用的要求。
高度集成的低功耗三相BLDC電機控制器
安森美推出的ECS640A是ecoSpin可配置電機控制器系列的最新成員,這是一款三相BLDC電機控制器,集成了超低功耗優化的Arm Cortex-M0+微控制器、三個感應放大器和一個參考放大器(NCS20034)、三個自舉二極管和一個專為高壓、高速運行而設計的高壓柵極驅動器,能夠驅動工作電壓高達600V的MOSFET和IGBT(FAN73896)。
ECS640A的六個柵極驅動器輸出為外部電源設備提供350 mA/650 mA(典型值)柵極電流的灌/拉電流。該器件包括霍爾傳感器輸入,支持有傳感器或無傳感器操作,三個獨立的低側源極引腳可實現單路或多路分流測量。ECS640A的保護功能包括欠壓鎖定和逆變器過流跳閘,并具有自動故障清除功能,并提供開漏故障信號來指示已發生故障情況。
ECS640A的直接扭矩和磁通控制(DTFC)固件現已推出,可在Arm Cortex-M0+平臺上實現最佳電機性能。客戶可直接從Theta Power Systems, Intl獲得DTFC代碼許可。ECS640A較小的占地面積和集成度,使該器件非常適合分立功率器件,以最大限度地提高跨平臺的可擴展性,并隨著功率水平的擴展而最大限度地減少面積要求。
ECS640A具有64kB閃存和8kB SRAM的Arm Cortex M0+嵌入式微控制器,支持600V FAN73896柵極驅動器,以及NCS20034的7MHz、高轉換速率、軌到軌四路放大器,采用小尺寸SiP,并具有“易于使用”的用戶環境。
ECS640A常應用于制冷壓縮機和鼓風機、暖通空調(HVAC)鼓風機和冷凝器、泳池水泵、工業驅動器和泵與機器人技術,常見的終端產品包括冰箱、瓶裝飲料冷藏柜、消費類空調機組、暖通空調鼓風機、商用空調機組、白色家電與協作機器人等。
高性能的雙MOSFET柵極驅動器
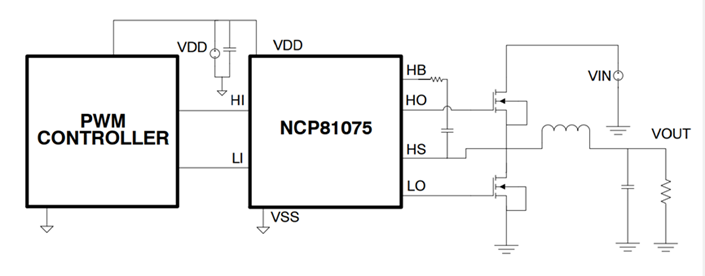
安森美推出的NCP81075是一款高性能雙MOSFET柵極驅動器,經過優化可驅動同步降壓轉換器中高壓側和低壓側功率MOSFET的柵極。NCP81075集成了一個驅動器集成電路和一個自舉二極管,使用片上自舉二極管來消除外部分立二極管,驅動能力高達4A,適用于驅動在高達180 V電壓下運行的高速、高電壓MOSFET,其高壓側和低壓側驅動器可獨立控制,并且彼此匹配的導通和關斷時間間隔為4 ns,并帶有匹配的3.5 ns典型傳播延遲。
NCP81075可驅動高壓側和低壓側的兩個N通道MOSFET,可用于高端柵極驅動的集成自舉二極管,其自舉電源電壓范圍高達180V,開關頻率高達1 MHz,具備4A拉電流、4A灌電流輸出能力,并可以8ns/7 ns的典型上升/下降時間驅動1nF負載,支持8.5V至20V的寬電源電壓范圍,具有快速傳播延遲時間(典型值20 ns)與2 ns延遲匹配(典型值),工作結溫范圍為-40℃至140℃,支持驅動電壓欠壓鎖定(UVLO)保護功能,當驅動電壓低于特定閾值時,強制輸出為低電平。
NCP81075采用SOIC?8 (D)、DFN8 (MN)、WDFN10 (MT)封裝,這些器件不含鉛、不含鹵素/溴化阻燃劑(BFR),并且符合RoHS標準,可廣泛應用于電信和數據通信、高電壓降壓轉換器、隔離電源、D類音頻放大器、雙開關和有源鉗位正激轉換器,NCP81075還可用于太陽能優化器和太陽能逆變器應用。
結語
AMR在眾多產業中的應用持續成長,然而,復雜的AMR系統需要集成多種不同的技術才能自主、可靠、安全地運行。因此,AMR應用能否成功,取決于設計時間是否選擇了合適的技術。安森美不僅可以提供電源與電機控制解決,還可提供各種傳感器(圖像、溫度、LiDAR、旋轉運動、可見光通信等),以及照明與通信等完整的產品解決方案,可確保AMR能夠充分發揮其潛能,將是工程師開發AMR應用的理想合作伙伴。
審核編輯:湯梓紅
-
機器人
+關注
關注
211文章
28418瀏覽量
207083 -
電機控制器
+關注
關注
20文章
525瀏覽量
32063 -
BLDC電機
+關注
關注
7文章
211瀏覽量
21479
原文標題:【技術干貨】自主移動機器人的電源和電機控制解決方案
文章出處:【微信號:艾睿電子,微信公眾號:艾睿電子】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
資料:移動機器人能否自動充電?
Labview My RIO 移動機器人
機器人、協作機器人和移動機器人,你分的清楚嗎
基于超聲波傳感器的自主移動機器人探測系統
基于LPC2119的自主式移動機器人設計方案
家庭移動機器人避障常用傳感器及相關技術
如何實現移動機器人的設計?
什么是移動機器人軟硬件系統問題
差速移動機器人軌跡跟蹤控制方法
【科普】干貨!帶你從0了解移動機器人(三) ——自主導航系統及上位機軟件設計與實現
基于Matlab和VR技術的移動機器人建模及仿真

DRC3000:商用移動機器人整體解決方案






 工商網監
工商網監
評論