") 高通自動(dòng)駕駛靠軟件開發(fā)革新力壓英偉達(dá)自動(dòng)駕駛芯片
高通自動(dòng)駕駛靠軟件開發(fā)革新力壓英偉達(dá)自動(dòng)駕駛芯片
拋開價(jià)格不談,英偉達(dá)自動(dòng)駕駛芯片毫無疑問是最強(qiáng)的,設(shè)計(jì)范圍在2019年底確定的Orin至今仍是量產(chǎn)最強(qiáng)的自動(dòng)駕駛芯片,但除了奔馳外的歐美大廠更傾向于選擇高通平臺(tái),這是因?yàn)楦咄ǖ男萝浖_發(fā)體系更符合歐美大廠的需求,直白講就是軟件研發(fā)成本更低,周期更短,從以前的數(shù)年變?yōu)閿?shù)周乃至數(shù)天。這就是高通和亞馬遜AWS聯(lián)合的CI/CD軟件開發(fā)體系。軟件越復(fù)雜,這種開發(fā)體系效率提升越明顯。
傳統(tǒng)汽車軟件開發(fā)的V模式
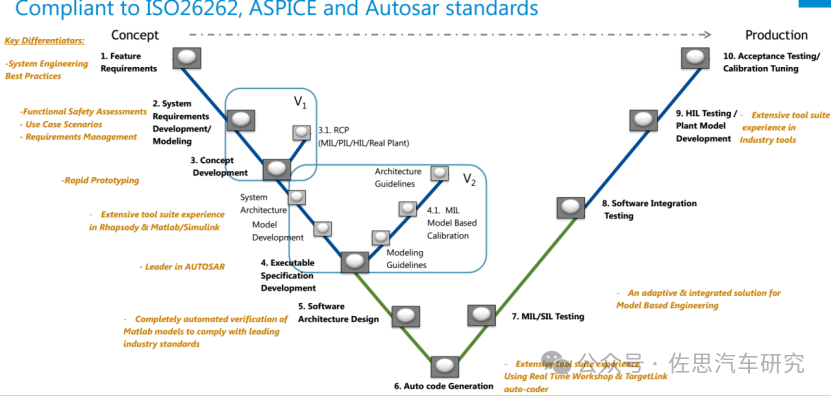
圖片來源:KPIT
傳統(tǒng)汽車軟件開發(fā)的V模式,軟件開發(fā)遵循僵化、遲鈍的瀑布法,并使用高度離散的工具鏈。開發(fā)過程被分割為不同的階段,只有前一個(gè)階段結(jié)束,后一個(gè)階段才會(huì)開始。許多開發(fā)過程都需要手動(dòng)完成。從工具鏈的一個(gè)部分切換到下一個(gè)部分也是如此。采用這種方法,即使很微小的軟件版本升級(jí)都需要耗時(shí)六到八個(gè)月。每換一個(gè)車型或一個(gè)SoC芯片,所有的工作都需要重復(fù)一遍,且軟件上車后,基本就算完成了軟件開發(fā)工作。
傳統(tǒng)的瀑布式,分離軟件開發(fā)體系
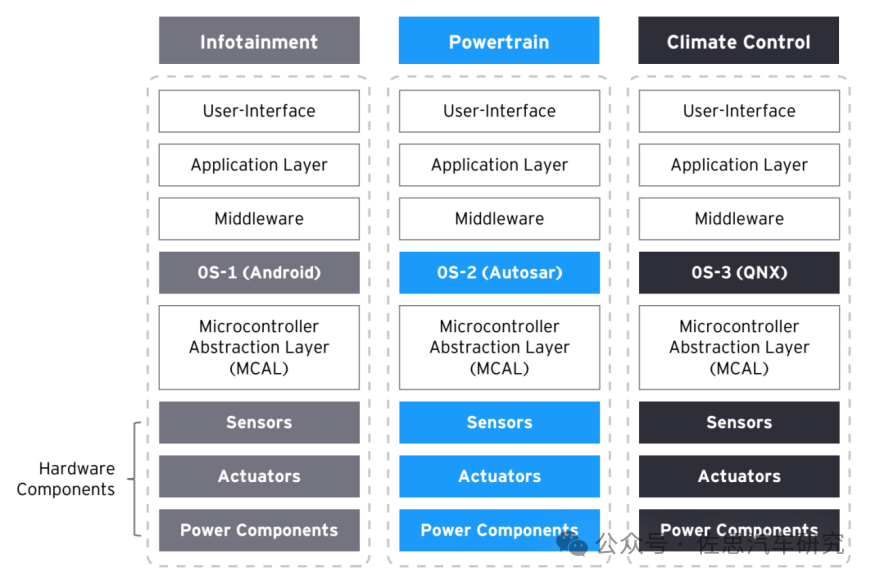
圖片來源:EY
軟件定義汽車如果采用這種傳統(tǒng)方法,會(huì)帶來天價(jià)開發(fā)費(fèi)用和超過數(shù)年的開發(fā)周期,因此汽車行業(yè)借鑒IT行業(yè)的經(jīng)驗(yàn),導(dǎo)入了CI/CD,CI即Continuous Integration,CD即Continuous Deployment或Continuous Delivery,持續(xù)集成/持續(xù)部署(交付),高通和AWS合作最早將CI/CD代入汽車工業(yè),應(yīng)用得最為熟練。智能駕駛領(lǐng)域,軟件異常復(fù)雜,需要大量的仿真測(cè)試,又牽涉到持續(xù)更新,還是數(shù)據(jù)驅(qū)動(dòng)型,是CI/CD的最佳應(yīng)用領(lǐng)域,反過來,智能駕駛領(lǐng)域必須用CI/CD,否則開發(fā)周期和成本都會(huì)很高。
軟件定義汽車的標(biāo)準(zhǔn)化軟件開發(fā)平臺(tái),即軟件工廠架構(gòu)
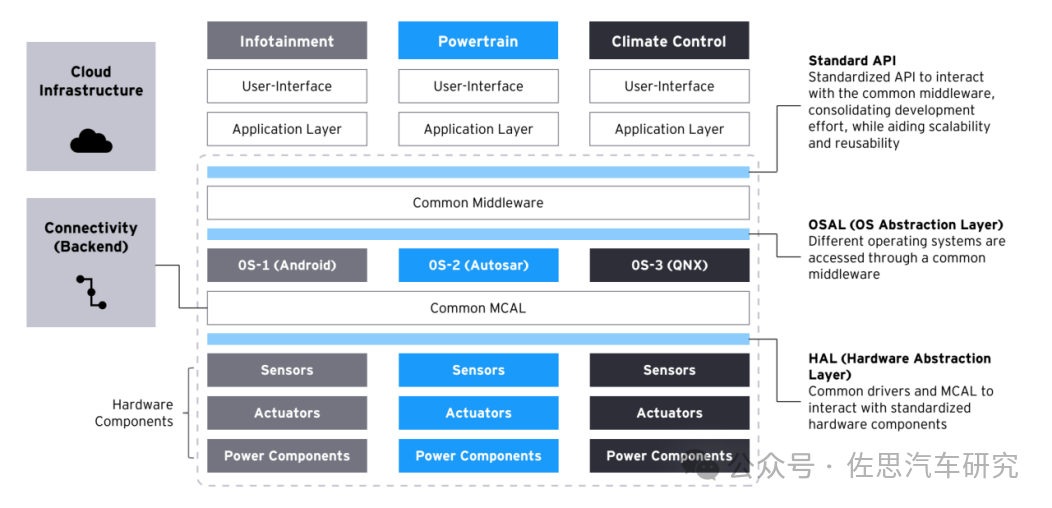
圖片來源:EY
當(dāng)然不僅是智能駕駛領(lǐng)域,整個(gè)汽車軟件領(lǐng)域都能推廣CI/CD。
圖片來源:CY
持續(xù)集成(CI)是指頻繁地(每天至少一次)將代碼集成到主干,其好處主要有:快速發(fā)現(xiàn)錯(cuò)誤;每完成一點(diǎn)更新就集成到主干,可以快速發(fā)現(xiàn)、定位錯(cuò)誤;防止分支大幅偏離主干。如果不是經(jīng)常集成,主干又在不斷更新,會(huì)導(dǎo)致以后集成的難度變大,甚至難以集成。
軟件開發(fā)教父Martin Fowler說過:“持續(xù)集成并不能消除Bug,而是讓它們非常容易被發(fā)現(xiàn)和改正。”持續(xù)集成(CI)開發(fā)人員將會(huì)頻繁地向主干提交代碼,這些新提交的代碼在最終合并到主干前,需要經(jīng)過自動(dòng)化集成、靜態(tài)代碼解析和自動(dòng)化測(cè)試流進(jìn)行驗(yàn)證,目標(biāo)是快速確認(rèn)開發(fā)人員新提交的變更是正確且適合在代碼庫中進(jìn)一步使用的,有助于降低總體構(gòu)建成本,并在開發(fā)周期的早期發(fā)現(xiàn)缺陷。
CI持續(xù)集成架構(gòu)
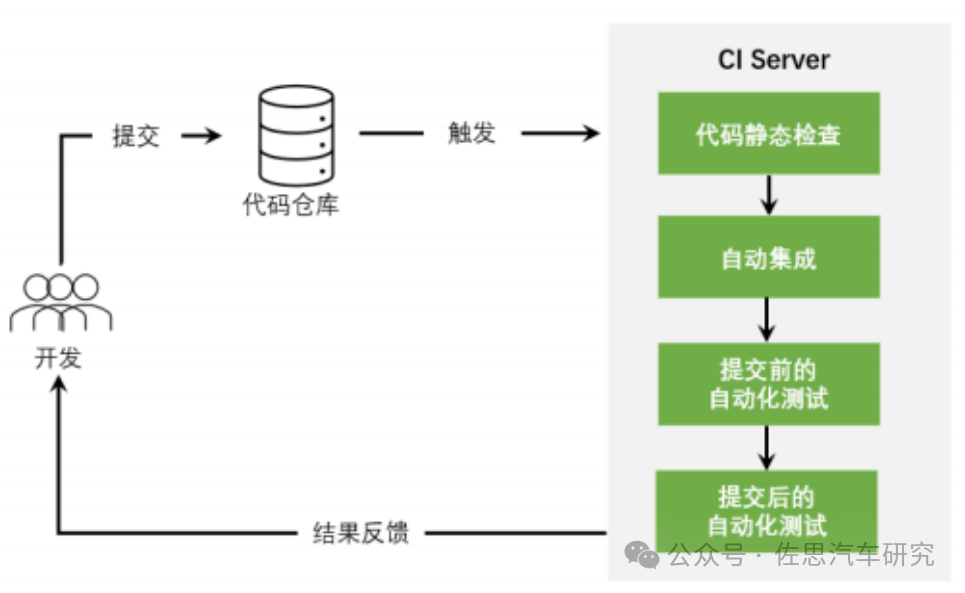
圖片來源:網(wǎng)絡(luò)
在持續(xù)集成(CI)方法中,軟件將實(shí)現(xiàn)自動(dòng)化編譯,軟件開發(fā)的各個(gè)步驟都將包含在 “CI鏈” 中,因?yàn)橐粋€(gè)環(huán)節(jié)的輸出將成為下一個(gè)環(huán)節(jié)的輸入。持續(xù)部署(CD)是指在車輛上市后自動(dòng)部署新的軟件版本。CI/CD以及持續(xù)測(cè)試(CT),現(xiàn)在都可以在汽車上實(shí)現(xiàn),但在汽車行業(yè),測(cè)試新的高級(jí)應(yīng)用程序會(huì)造成獨(dú)特的難題,原因是測(cè)試需要在實(shí)體車輛上或者在測(cè)試臺(tái)上的復(fù)雜模擬環(huán)境中進(jìn)行。例如,想象一下對(duì)特定軟件進(jìn)行測(cè)試有多復(fù)雜,該軟件需要分析來自多個(gè)雷達(dá)和攝像頭的輸入信息,以便自主執(zhí)行操控,如超過公路上慢速行駛的汽車,或者在車輛、行人及其它障礙物遍布的復(fù)雜城市環(huán)境中進(jìn)行導(dǎo)航。
持續(xù)測(cè)試
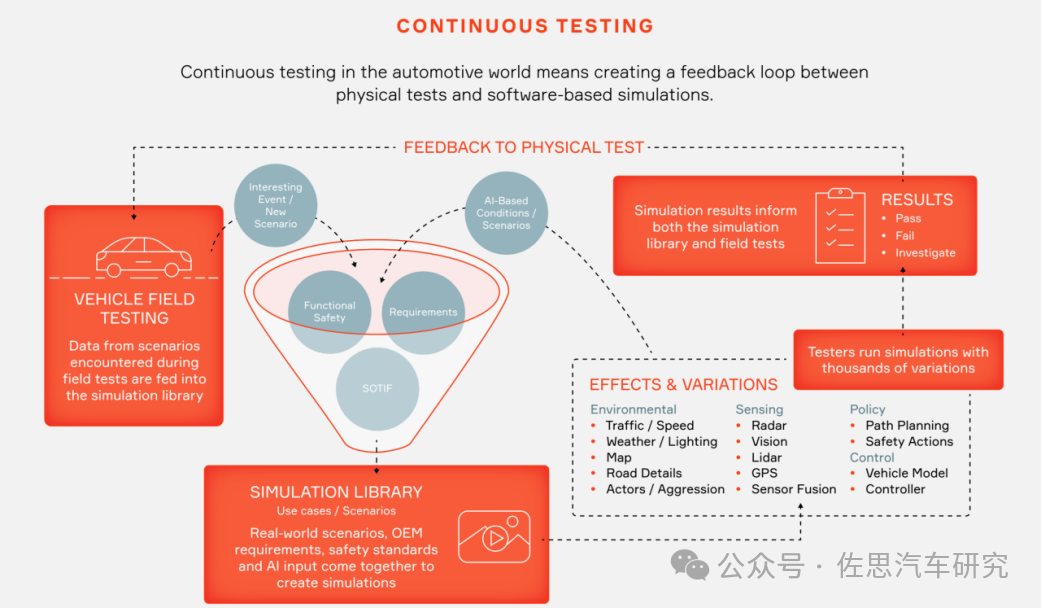
圖片來源:Aptiv
理想的方法是通過基于云的集中化平臺(tái),使開發(fā)人員能夠在位于世界任何測(cè)試中心的相關(guān)測(cè)試臺(tái)上執(zhí)行任何測(cè)試,從而消除開發(fā)和測(cè)試過程中的瓶頸。這些測(cè)試可以安排軟件在環(huán)(SIL)、硬件在環(huán)(HIL)甚至車輛在環(huán)(VIL),以便進(jìn)行更真實(shí)的測(cè)試。此方法可以利用全球資源,達(dá)到處理當(dāng)今艱巨挑戰(zhàn)所需的規(guī)模。
CI/CD的無窮循環(huán)
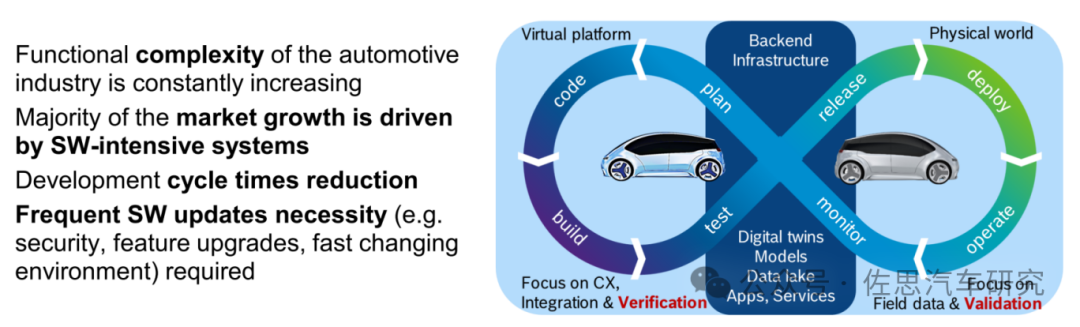
圖片來源:MathWorks
CI/CD的具體執(zhí)行就是DevOps
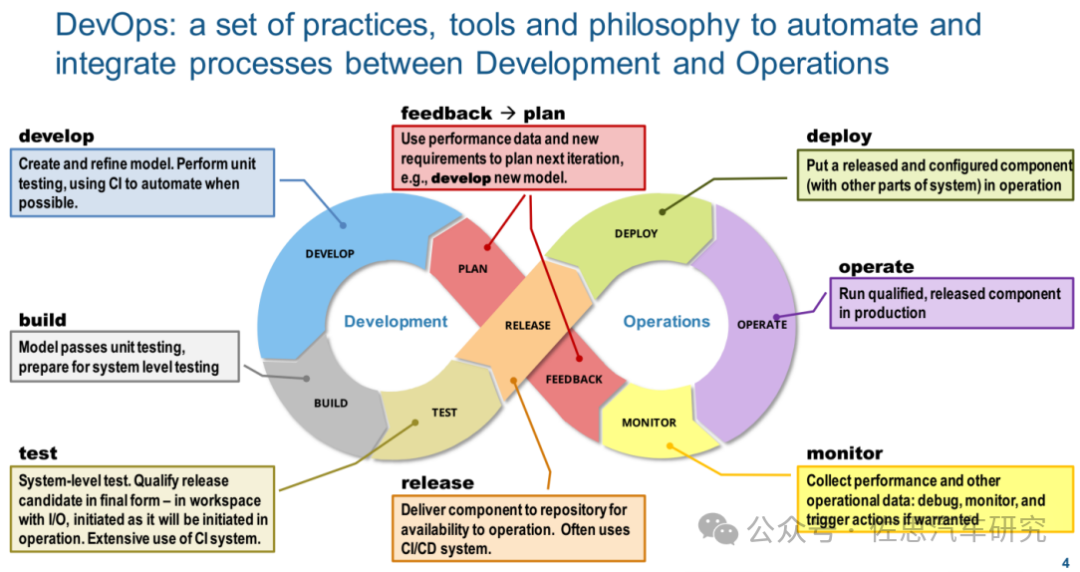
圖片來源:AWS
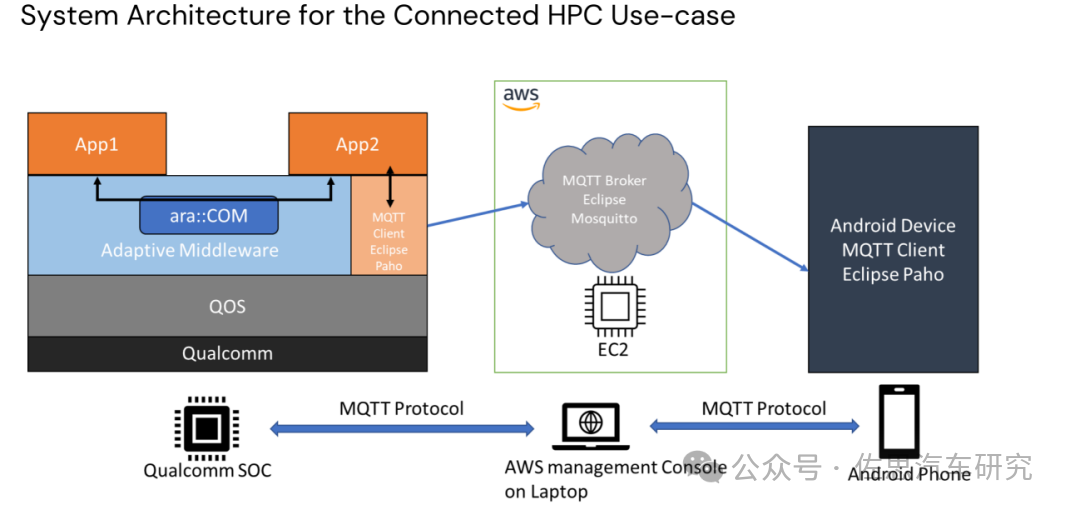
高通與AWS聯(lián)合的云開發(fā)平臺(tái)正是基于CI/CD的理念
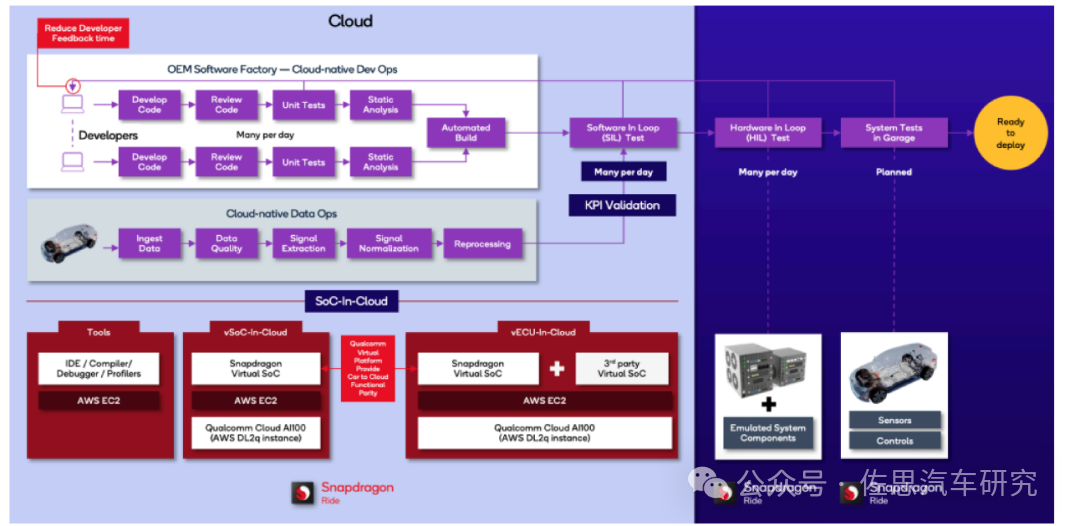
圖片來源:AWS
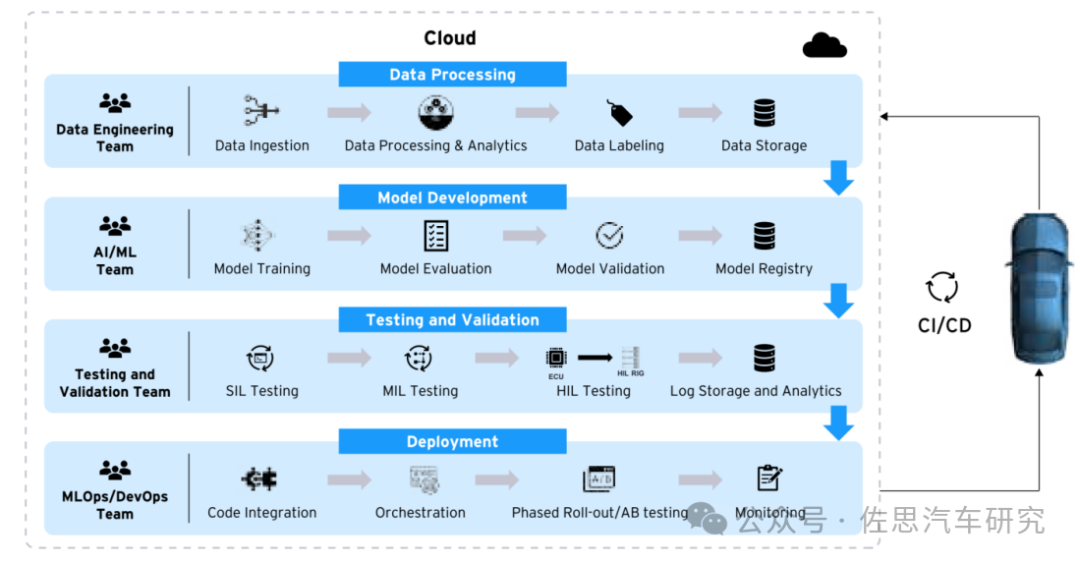
AWS基于云的自動(dòng)駕駛數(shù)據(jù)驅(qū)動(dòng)開發(fā)流程
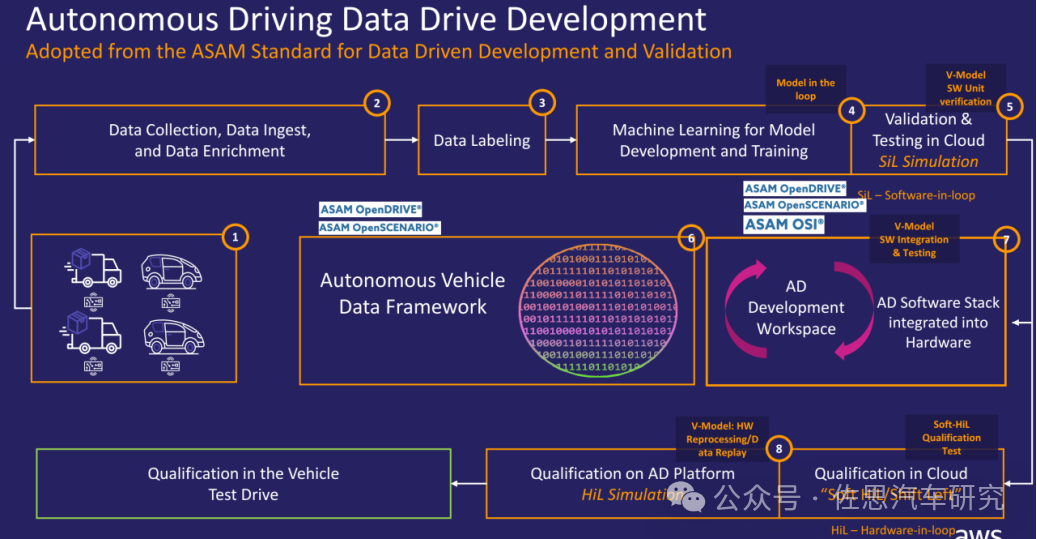
圖片來源:AWS
AWS原生云汽車軟件開發(fā)
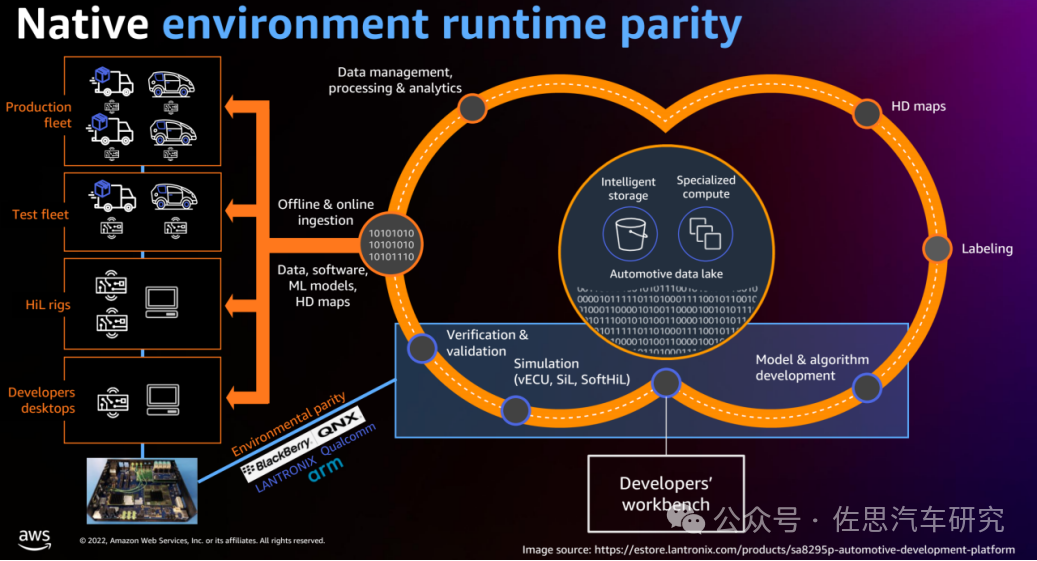
圖片來源:AWS
CI/CD環(huán),省略很多目標(biāo)搭建和基礎(chǔ)測(cè)試
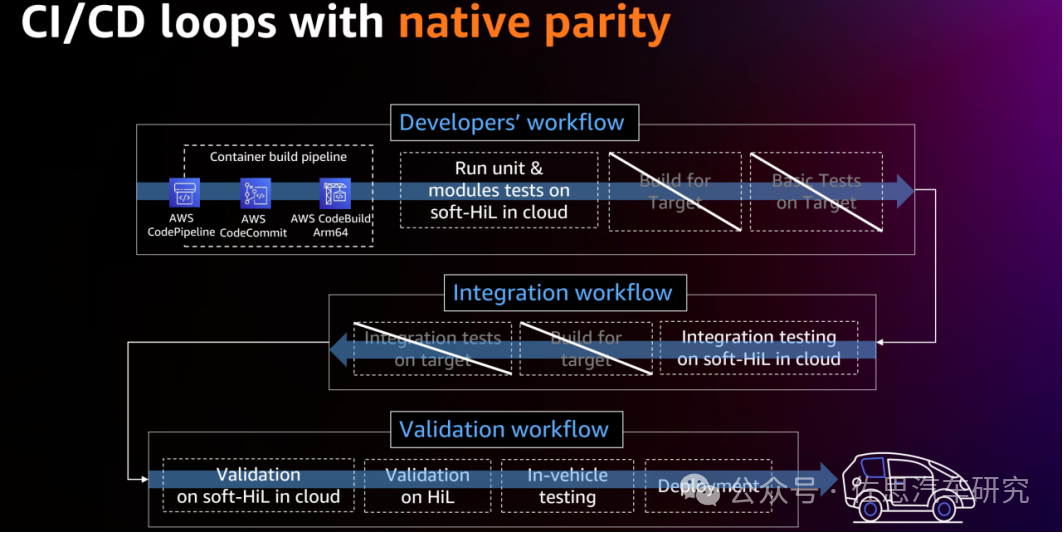
圖片來源:AWS
高通數(shù)字底盤與軟件定義汽車架構(gòu)
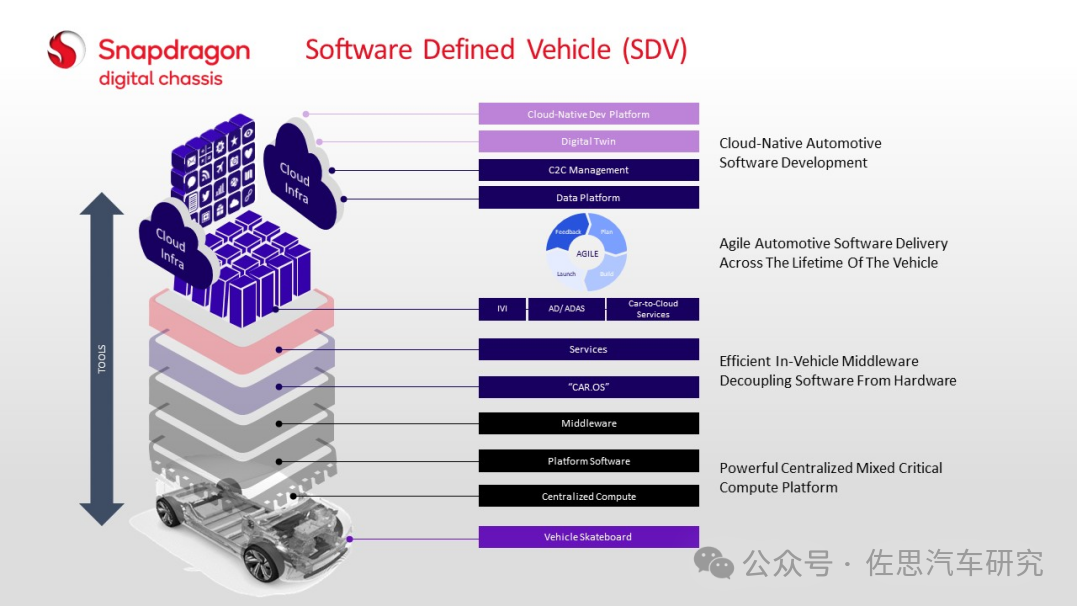
圖片來源:高通
云端的Digital Twin基本上可等同于物理SoC芯片,也有叫虛擬VECU,將SoC完全抽象化。當(dāng)然英偉達(dá)也有Digital Twin,不過那是針對(duì)AI領(lǐng)域的,英偉達(dá)也有云端仿真測(cè)試,即NVIDIA DRIVE Sim,不過那主要還是依靠Omniverse的仿真,不是VECU。Omniverse主要瞄準(zhǔn)游戲開發(fā)和工業(yè)AI領(lǐng)域,與VECU差別很大,順便一提digital twin最早還是英偉達(dá)提出來的。
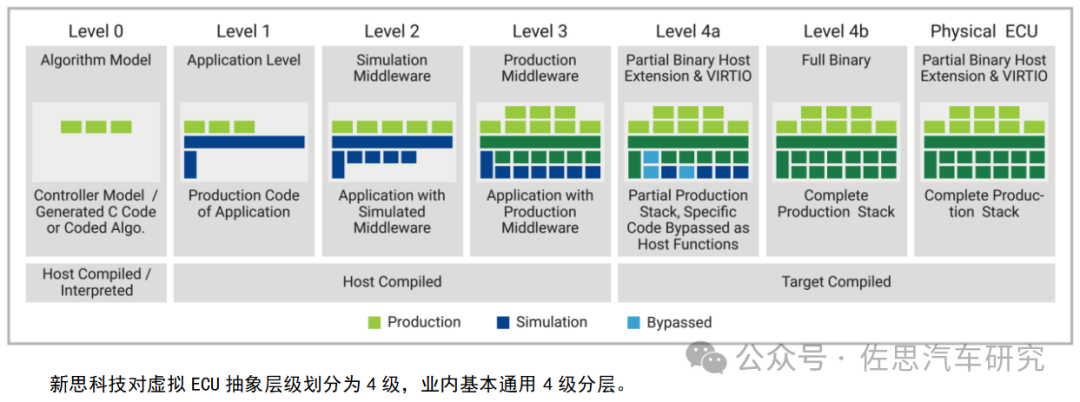
圖片來源:新思科技
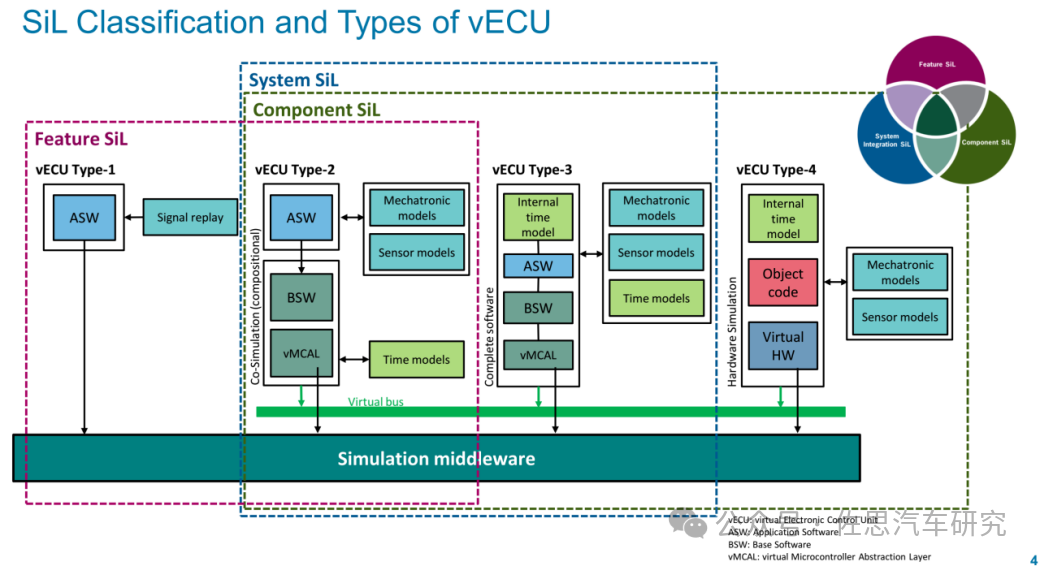
圖片來源:MathWorks
SiL軟件在環(huán)環(huán)節(jié)必備VECU,當(dāng)然這需要SoC芯片廠家配合,做中央計(jì)算軟件定義汽車必備最高的4級(jí)虛擬ECU,即全二進(jìn)制虛擬ECU,實(shí)際上這樣需要ARM這樣的內(nèi)核架構(gòu)供應(yīng)商協(xié)助。
圖片來源:TATA
高通自5G網(wǎng)絡(luò)部署時(shí)期對(duì)DevOps已經(jīng)具備非常深厚的基礎(chǔ),基本上高通把那一套搬到了汽車領(lǐng)域,而芯片從一開始就考慮原生云開發(fā),就考慮了和AWS合作,這是高通足以抗衡英偉達(dá)的原因。不過在中國,軟件開發(fā)人力資源充沛,軟件開發(fā)成本低,且大多是全新開發(fā)項(xiàng)目,讓基于原生云和CI/CD(DevOps)的軟件開發(fā)優(yōu)勢(shì)不明顯,但對(duì)老牌歐美廠家和大型Tier1來說,原生云和CI/CD(DevOps)的軟件開發(fā)幾乎是必備的,大眾、寶馬、奧迪、通用、三星哈曼、博世、法雷奧、馬瑞利、松下、ZF、麥格納、電裝、黑莓、大陸汽車、LG基本都是如此。芯片廠家提供必要的支持,芯片廠家目前主要有高通和NXP。這些廠家和Tier1基本都選擇了高通平臺(tái)作為主力平臺(tái)。
審核編輯:劉清
-
SoC芯片
+關(guān)注
關(guān)注
1文章
615瀏覽量
34966 -
智能駕駛
+關(guān)注
關(guān)注
3文章
2561瀏覽量
48821 -
英偉達(dá)
+關(guān)注
關(guān)注
22文章
3810瀏覽量
91443 -
AWS
+關(guān)注
關(guān)注
0文章
432瀏覽量
24417 -
自動(dòng)駕駛芯片
+關(guān)注
關(guān)注
3文章
48瀏覽量
5097
原文標(biāo)題:高通自動(dòng)駕駛靠軟件開發(fā)革新力壓英偉達(dá)
文章出處:【微信號(hào):zuosiqiche,微信公眾號(hào):佐思汽車研究】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
黃仁勛宣布:豐田與英偉達(dá)攜手打造下一代自動(dòng)駕駛汽車
從《自動(dòng)駕駛地圖數(shù)據(jù)規(guī)范》聊高精地圖在自動(dòng)駕駛中的重要性


什么是自動(dòng)駕駛場(chǎng)景仿真軟件——VTD(Virtial Test Drive)?#ADAS #智能駕駛
使用PVA引擎優(yōu)化自動(dòng)駕駛汽車CV開發(fā)流水線

自動(dòng)駕駛汽車安全嗎?


自動(dòng)駕駛HiL測(cè)試方案案例分析--ADS HiL測(cè)試系統(tǒng)#ADAS #自動(dòng)駕駛 #VTHiL

自動(dòng)駕駛HiL測(cè)試方案介紹#ADAS #自動(dòng)駕駛 #VTHiL
FPGA在自動(dòng)駕駛領(lǐng)域有哪些優(yōu)勢(shì)?
FPGA在自動(dòng)駕駛領(lǐng)域有哪些應(yīng)用?
自動(dòng)駕駛仿真測(cè)試實(shí)踐:高精地圖仿真






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論