 道路千萬條,安全第一條,如何讓機器人更安全?
道路千萬條,安全第一條,如何讓機器人更安全?
停的住,停的穩,該避就避,該停就停。
商用機器人實現落地的前提有很多,但安全問題毫無疑問是重中之重。尤其隨著機器人的應用場景開始向復雜化、小型化方向拓展,對機器人的安全能力要求更是與日俱增。如何保證機器人在場景中安全穩定運行,成為了行業較大的難題。
從市場調查看到,商用場景有著場景復雜、人員流動性大等特征,機器人面對商用場景中常見的高透類障礙物(玻璃護欄、玻璃墻等)、高危場景(自動扶梯、轉門等)以及超市中的狹窄通道、貨架等類似障礙物或場景,加之行人的隨機性,往往有著極大挑戰,導致避障“失靈”的情況常有發生。
作為國內最大的機器人技術公司之一,INDEMIND在長期研發中,一直把安全技術放在核心,通過大膽嘗試前沿視覺技術,積累了大量先進經驗。目前,在安全技術研發上,得益于視覺導航技術路線的天然優勢,INDEMIND開發了一套獨有的安全決策引擎。通過從傳感器、識別算法、語義地圖、策略執行4個層面出發,建立各單元聯動機制,充分釋放系統硬件潛力,顯著提升機器人的安全表現。
l 多傳感器融合,提升信息獲取能力:傳感器采用雙目視覺模組、Lidar、ToF、跌落傳感器、碰撞傳感器;
l AI識別算法,精準識別場景信息:基于ToF 3D數據,基于camera 2D環境圖像數據、基于Lidar 2D平面數據等的物體及場景識別及基于跌落、碰撞等傳感器的概率判別;
l 3D語義地圖,賦予“人眼”感官:基于識別得到的語義信息結合機器人位姿信息,構建環境語義地圖;
l 策略執行,模仿“人腦”決策:對構建的語義地圖疊加決策屬性信息,進行安全決策執行。
同時,INDEMIND擁有超過100個使用場景的海量數據,對不同商用場景有著深度理解,并基于此分類做了整體化安全策略,機器人無需再根據不同場景做針對性處理,縮短安全決策流程,大大提升機器人的適應能力及作業效率,如行人識別及規避的安全策略、跌落場景識別及規避的安全策略等。
需要提到的是,市面上大多數機器人的避障方案主要是借助激光、ToF、結構光、雙目等傳感器采集場景內障礙物的點云信息,構建場景柵格地圖,然后對障礙物進行避障,此類方案雖然能夠實現避障,但主動性不足,反應較為呆板,“能用”卻不“好用”。同時,還存在傳感器成本高(多線激光雷達)、視場角小(如ToF)等問題。
不只是字面上的領先
實際場景中,環境變化有很大的不可預測性,隨時插路的行人、鉆出的兒童車、玩具、拋物或跌落物等等,機器人需要具備靈敏的隨機應變能力,做到停的住,停的穩,該避就避,該停就停。而INDEMIND在技術上實現了實時檢測拋物、行人、快速移動物體外,還能夠實時進行潛在風險判斷(行人等),并根據風險分類,提前做出規避策略,實現主動安全。
? 行人匯入,穩健規避

? 滾動玩具,果斷急停

? 闖入運行路線的兒童車,穩健規避

? 拋物急停和避障


對于讓機器人頭疼的高反障礙物,如玻璃護欄等,是最難解決的難題之一,由于玻璃透光性高,激光傳感器難以正常工作,往往需要融合其他傳感器,如超聲,不過因為技術研發難度較高,市面上并沒有太多成熟的技術方案。而INDEMIND基于多年積累,在高反障礙物避障方面實現率先突破。
? 全玻璃過道,穩健通過,實現行業領先

? 移動玻璃,實時規避

? 透明高臺,穩健防跌

與此同時,對于擁有展臺這類頂部延伸的蘑菇場景,也是機器人避障過程中的一大難點,INDEMIND對這類物體同樣進行了避障適配。
? 蘑菇場景,穩健規避

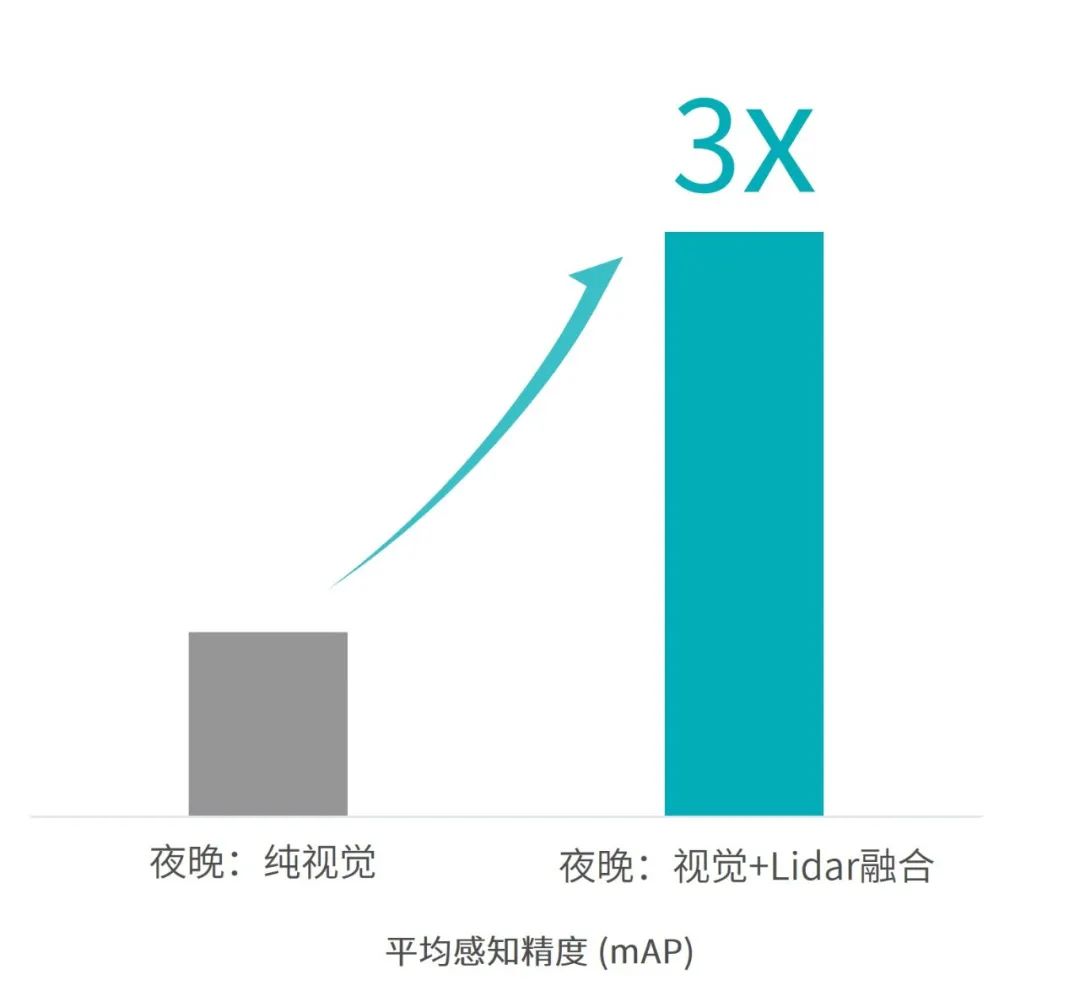
此外,面對不同光線條件,機器人同樣能夠穩定避障。基于INDEMIND的強光規避策略和硬件上內置的亮度補光、紋理補光兩種紅外補光設備(均符合人眼安全等級C1等級要求),機器人滿足強光直射、無光源、昏暗等特殊光照環境下的無差異工作要求。

審核編輯 黃宇
-
傳感器
+關注
關注
2552文章
51227瀏覽量
754644 -
機器人
+關注
關注
211文章
28512瀏覽量
207496
發布評論請先 登錄
相關推薦
《具身智能機器人系統》第10-13章閱讀心得之具身智能機器人計算挑戰
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統」閱讀體驗】1.全書概覽與第一章學習
安全光柵在工業機器人上的應用

優寶特機器人完成數千萬元融資
如何借助恩智浦MCX系列MCU糾錯功能,打造可靠安全的移動機器人?

安防巡檢機器人:守護安全的智能衛士

ROS讓機器人開發更便捷,基于RK3568J+Debian系統發布!
亞馬遜停止生產企業安全機器人,專注家用機器人
Ex1-C6防爆巡檢機器人——工業安全的守護者






 工商網監
工商網監
評論