") 激光雷達(dá)LIDAR基本工作原理
激光雷達(dá)LIDAR基本工作原理
一、激光雷達(dá)LiDAR工作原理
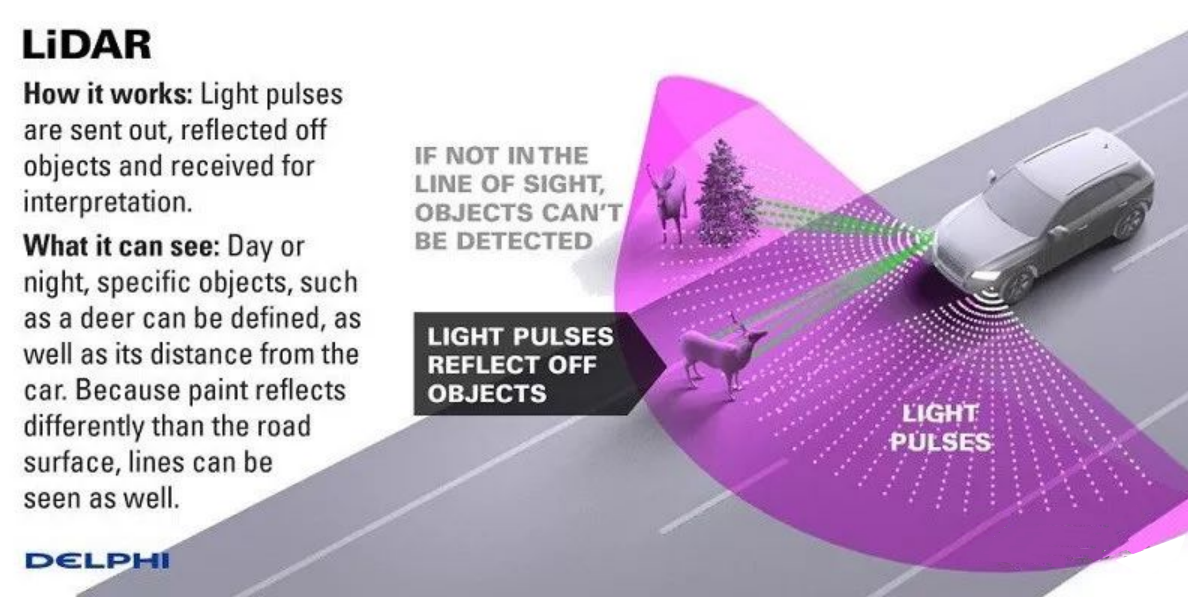
激光雷達(dá)LiDAR的全稱為Light Detection and Ranging激光探測和測距,又稱光學(xué)雷達(dá)。
激光雷達(dá)的工作原理:對人畜無害的紅外光束Light Pluses發(fā)射、反射和接收來探測物體。能探測的對象:白天或黑夜下的特定物體與車之間的距離。甚至由于反射度的不同,車道線和路面也是可以區(qū)分開來的。哪些物體無法探測:光束無法探測到被遮擋的物體。
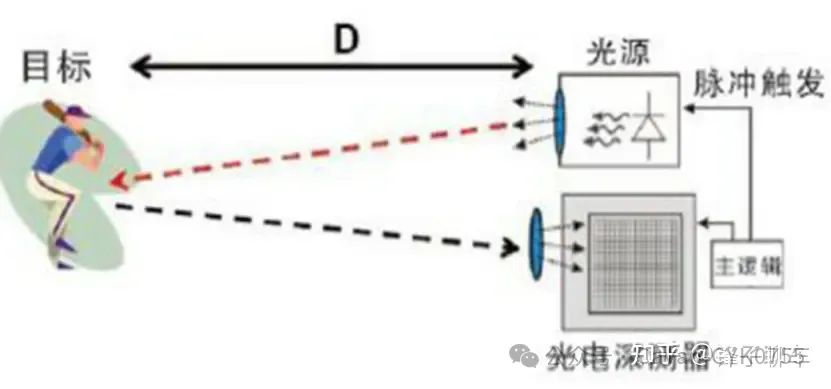
車用激光雷達(dá)工作原理就是蝙蝠測距用的回波時(shí)間(Time of Flight,縮寫為TOF)測量方法。分析目標(biāo)物體表面的反射能量大小、反射波譜的幅度、頻率和相位等信息,輸出點(diǎn)云,從而呈現(xiàn)出目標(biāo)物精確的三維結(jié)構(gòu)信息。
激光雷達(dá)測距及點(diǎn)云
但要知道光速是每秒30萬公里。要區(qū)分目標(biāo)厘米級別的精確距離,那對傳輸時(shí)間測量分辨率必須做到1納秒。要如此精確的測量時(shí)間,因此對應(yīng)的測量系統(tǒng)的成本就很難降到很低,需要使用巧妙的方法降低測量難度。
首先,我們需要明確,激光雷達(dá)并不是獨(dú)立運(yùn)作的,一般是由激光發(fā)射器、接收器和慣性定位導(dǎo)航三個(gè)主要模塊組成。當(dāng)激光雷達(dá)工作的時(shí)候,會(huì)對外發(fā)射激光,在遇到物體后,激光折射回來被CMOS傳感器接收,從而測得本體到障礙物的距離。從原理來看,只要需要知道光速、和從發(fā)射到CMOS感知的時(shí)間就可以測出障礙物的距離,再結(jié)合實(shí)時(shí)GPS、慣性導(dǎo)航信息與計(jì)算激光雷達(dá)發(fā)射出去角度,系統(tǒng)就可以得到前方物體的坐標(biāo)方位和距離信息。
緊接著,一個(gè)激光雷達(dá)如果能在同一個(gè)空間內(nèi),按照設(shè)定好的角度發(fā)射多條激光,就能得到多條基于障礙物的反射信號。再配合時(shí)間范圍、激光的掃描角度、GPS 位置和 INS 信息,經(jīng)過數(shù)據(jù)處理后,這些信息配合x,y,z坐標(biāo),就會(huì)成為具有距離信息、空間位置信息等的三維立體信號,再基于軟件算法組合起來,系統(tǒng)就可以得到線、面、體等各種相關(guān)參數(shù),以此建立三維點(diǎn)云圖,繪制出環(huán)境地圖,就能變成汽車的“眼睛”。
激光雷達(dá)是由激光發(fā)射單元和激光接收單元組成,發(fā)射單元的工作方式是向外發(fā)射激光束層,層數(shù)越多,精度也越高(如下圖所示),不過這也意味著傳感器尺寸越大。發(fā)射單元將激光發(fā)射出去后,當(dāng)激光遇到障礙物會(huì)反射,從而被接收器接收,接收器根據(jù)每束激光發(fā)射和返回的時(shí)間,創(chuàng)建一組點(diǎn)云,高質(zhì)量的激光雷達(dá),每秒最多可以發(fā)出200多束激光。
不同激光束形成的激光點(diǎn)云
對于激光的波長,目前主要使用使用波長為905nm和1550nm的激光發(fā)射器,波長為1550nm的光線不容易在人眼液體中傳輸。故1550nm可在保證安全的前提下大大提高發(fā)射功率。大功率能得到更遠(yuǎn)的探測距離,長波長也能提高抗干擾能力。但是1550nm激光需使用InGaAs,目前量產(chǎn)困難。故當(dāng)前更多使用Si材質(zhì)量產(chǎn)905nm的LiDAR。通過限制功率和脈沖時(shí)間來保證安全性。
1.1 技術(shù)原理
激光雷達(dá)探測的具體技術(shù)可以分為TOF飛行時(shí)間法與相干探測方法。其中ToF方法可以進(jìn)一步區(qū)分為iToF和dToF方法;
1.1.1飛行時(shí)間(ToF)探測方法
通過直接計(jì)算發(fā)射及接收電磁波的時(shí)間差測量被測目標(biāo)的距離;
1.1.2 相干探測方法(如:FMCW)
通過測量發(fā)射電磁波與返回電磁波的頻率變化解調(diào)出被測目標(biāo)的距離及速度;
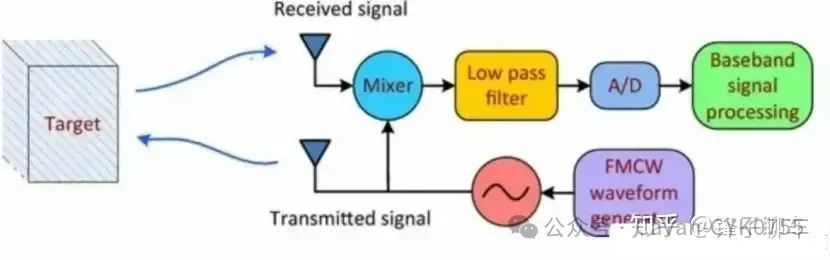
FMCW雷達(dá)原理示意圖
1.2激光雷達(dá)的FOV
FOV指激光雷達(dá)能夠探測到的視場范圍,可以從垂直和水平兩個(gè)維度以角度來衡量范圍大小,下圖比較形象的展示了激光雷達(dá)FOV范圍,之所以要提到FOV是因?yàn)楹竺娌煌募夹g(shù)路線基本都是為了能夠?qū)崿F(xiàn)對FOV區(qū)域內(nèi)探測。
垂直FOV:常見的車載激光雷達(dá)通常在25°,形狀呈扇形;
水平FOV:常見的機(jī)械式激光雷達(dá)可以達(dá)到360°范圍,通常布置于車頂;常見的車載半固態(tài)激光雷達(dá)通常可以達(dá)到120°范圍,形狀呈扇形,可布置于車身或車頂;
1.3 激光雷達(dá)在L2+的性能要求
對于激光雷達(dá)在L2+的性能要求如下:
a、測距距離有要求,高速場景下至少有150米以上的探測距離
b、具有120FOV寬視角,滿足十字路口等特殊場景的檢測;
c、測距的精準(zhǔn)度,滿足≤3cm,角分辨率越小越好,水平和垂直≤0.3°
d、具備100線以上的掃描效果和百萬級別點(diǎn)頻,這樣遇到150米以外的物體也能反射回足夠多的激光點(diǎn)云用于識(shí)別
e、具有車規(guī)級標(biāo)準(zhǔn)的工作溫度,能夠規(guī)模化生產(chǎn)
f、體積一定要小,方便車企的造型設(shè)計(jì)
二、激光雷達(dá)結(jié)構(gòu)
激光雷達(dá)的關(guān)鍵部件按照信號處理的信號鏈包括控制硬件DSP(數(shù)字信號處理器)、激光驅(qū)動(dòng)、激光發(fā)射發(fā)光二極管、發(fā)射光學(xué)鏡頭、接收光學(xué)鏡頭、APD(雪崩光學(xué)二極管)、TIA(可變跨導(dǎo)放大器)和探測器,如下圖所示。其中除了發(fā)射和接收光學(xué)鏡頭外,都是電子部件。隨著半導(dǎo)體技術(shù)的快速演進(jìn),性能逐步提升的同時(shí)成本迅速降低。但是光學(xué)組件和旋轉(zhuǎn)機(jī)械則占具了激光雷達(dá)的大部分成本。
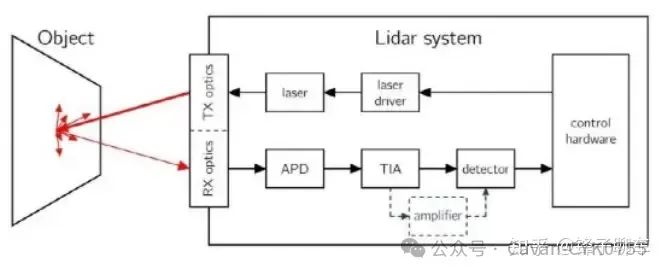
激光雷達(dá)的關(guān)鍵部件
三、激光雷達(dá)的種類
把激光雷達(dá)按照掃描方式來分類,目前有機(jī)械式激光雷達(dá)、半固態(tài)激光雷達(dá)和固態(tài)激光雷達(dá)三大類。其中機(jī)械式激光雷達(dá)最為常用,固態(tài)激光雷達(dá)為未來業(yè)界大力發(fā)展方向,半固態(tài)激光雷達(dá)是機(jī)械式和純固態(tài)式的折中方案,屬于目前階段量產(chǎn)裝車的主力軍。

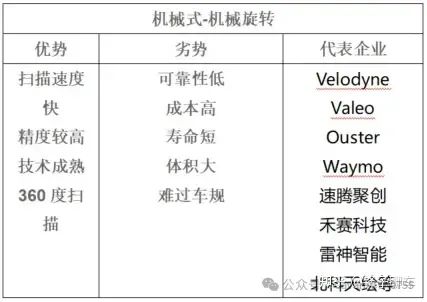
3.1機(jī)械式激光雷達(dá)
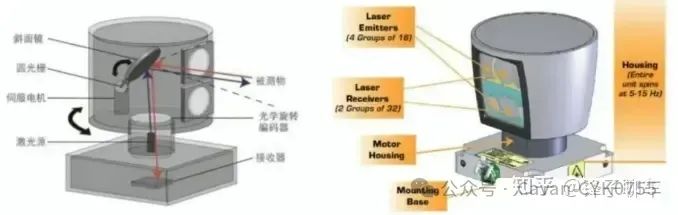
3.1.1 工作原理
發(fā)射和接收模塊被電機(jī)電動(dòng)進(jìn)行360度旋轉(zhuǎn)。在豎直方向上排布多組激光線束,發(fā)射模塊以一定頻率發(fā)射激光線,通過不斷旋轉(zhuǎn)發(fā)射頭實(shí)現(xiàn)動(dòng)態(tài)掃描。
3.1.2 優(yōu)劣勢分析
優(yōu)勢:機(jī)械式激光雷達(dá)作為最早裝車的產(chǎn)品,技術(shù)已經(jīng)比較成熟,因?yàn)槠涫怯?a target="_blank">電機(jī)控制旋轉(zhuǎn),所以可以長時(shí)間內(nèi)保持轉(zhuǎn)速穩(wěn)定,每次掃描的速度都是線性的。并且由于『站得高』,機(jī)械式激光雷達(dá)可以對周圍環(huán)境進(jìn)行精度夠高并且清晰穩(wěn)定的360度環(huán)境重構(gòu)。
劣勢:雖然技術(shù)成熟,但因?yàn)槠鋬?nèi)部的激光收發(fā)模組線束多,并且需要復(fù)雜的人工調(diào)教,制造周期長,所以成本并不低,并且可靠性差,導(dǎo)致可量產(chǎn)性不高。其次,機(jī)械式激光雷達(dá)體積過大,消費(fèi)者接受度不高。最后,它的壽命大約在1000h~3000h,而汽車廠商的要求是至少13000h,這也決定了其很難走向C端市場。
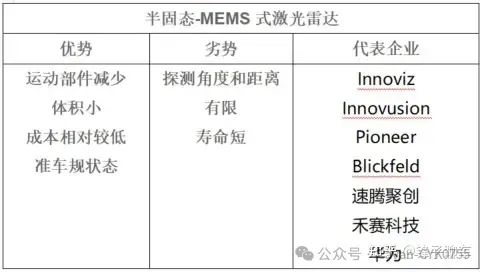
3.2 半固態(tài)—MEMS式激光雷達(dá)
MEMS全稱Micro-Electro-Mechanical System(微機(jī)電系統(tǒng)),是將原本激光雷達(dá)的機(jī)械結(jié)構(gòu)通過微電子技術(shù)集成到硅基芯片上。本質(zhì)上而言MEMS激光雷達(dá)并沒有做到完全取消機(jī)械結(jié)構(gòu),所以它是一種半固態(tài)激光雷達(dá)。
3.2.1 工作原理
MEMS在硅基芯片上集成了體積十分精巧的微振鏡,其核心結(jié)構(gòu)是尺寸很小的懸臂梁——通過控制微小的鏡面平動(dòng)和扭轉(zhuǎn)往復(fù)運(yùn)動(dòng),將激光管反射到不同的角度完成掃描,而激光發(fā)生器本身固定不動(dòng)。
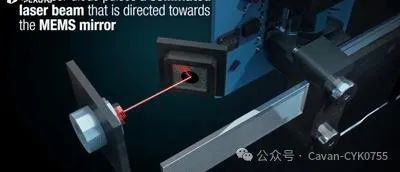
MEMS激光雷達(dá)微振鏡模塊
3.2.2 優(yōu)劣勢分析
優(yōu)勢:MEMS激光雷達(dá)因?yàn)閿[脫了笨重的「旋轉(zhuǎn)電機(jī)」和「掃描鏡」等機(jī)械運(yùn)動(dòng)裝置,去除了金屬機(jī)械結(jié)構(gòu)部件,同時(shí)配備的是毫米級的微振鏡,這大大減少了MEMS激光雷達(dá)的尺寸,與傳統(tǒng)的光學(xué)掃描鏡相比,在光學(xué)、機(jī)械性能和功耗方面表現(xiàn)更為突出。其次,得益于激光收發(fā)單元的數(shù)量的減少,同時(shí)MEMS振鏡整體結(jié)構(gòu)所使用的硅基材料還有降價(jià)空間,因此MEMS激光雷達(dá)的整體成本有望進(jìn)一步降低。
劣勢:MEMS激光雷達(dá)的「微振鏡」屬于振動(dòng)敏感性器件,同時(shí)硅基MEMS的懸臂梁結(jié)構(gòu)非常脆弱,外界的振動(dòng)或沖擊極易直接致其斷裂,車載環(huán)境很容易對其使用壽命和工作穩(wěn)定性產(chǎn)生影響。其次,MEMS的振動(dòng)角度有限導(dǎo)致視場角比較小(小于120度),同時(shí)受限于MEMS微振鏡的鏡面尺寸,傳統(tǒng)MEMS技術(shù)的有效探測距離只有50米,F(xiàn)OV角度只能達(dá)到30度,多用于近距離補(bǔ)盲或者前向探測。
目前,由于MEMS上游供應(yīng)鏈已經(jīng)相對成熟,比如Luminar的MEMS半固態(tài)激光雷達(dá)已將制造成本降低到了500-1000美元,使規(guī)模量產(chǎn)成為了可能。國內(nèi)方面,速騰聚創(chuàng)和廣汽埃安、威馬、極氪等11家車企建立了合作,同時(shí)其產(chǎn)品「RS-LiDAR-M1」已于2020年12月開始批量出貨,成為全球首款批量交付的車規(guī)級MEMS激光雷達(dá)。海外方面,Luminar在全球范圍內(nèi)已擁有50多位行業(yè)合作伙伴,其中包括沃爾沃、上汽飛凡汽車、小馬智行等。
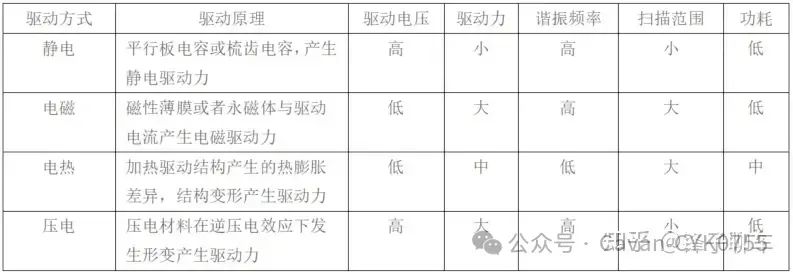
3.2.3 微震鏡不同驅(qū)動(dòng)方式特點(diǎn)
3.3 半固態(tài)—轉(zhuǎn)鏡式激光雷達(dá)
轉(zhuǎn)鏡式激光雷達(dá)與MEMS激光雷達(dá)差異在于,前者的掃描鏡是圍繞著圓心旋轉(zhuǎn),后者則是圍繞著某條直徑上下振動(dòng)。相比之下,轉(zhuǎn)鏡式激光雷達(dá)的功耗更低,散熱難度更低,因而也更容易擁有比較高的可靠性。
3.3.1 工作原理
與MEMS微振鏡平動(dòng)和扭轉(zhuǎn)的形式不同,轉(zhuǎn)鏡是反射鏡面圍繞圓心不斷旋轉(zhuǎn),從而實(shí)現(xiàn)激光的掃描。在轉(zhuǎn)鏡方案中,也存在一面掃描鏡(一維轉(zhuǎn)鏡)和一縱一橫兩面掃描鏡(二維轉(zhuǎn)鏡)兩種技術(shù)路線。一維轉(zhuǎn)鏡線束與激光發(fā)生器數(shù)量一致,而二維轉(zhuǎn)鏡可以實(shí)現(xiàn)等效更多的線束,在集成難度和成本控制上存在優(yōu)勢。
簡而言之,使用轉(zhuǎn)鏡折射光線實(shí)現(xiàn)激光在FOV區(qū)域內(nèi)的覆蓋,通常與線光源配合使用,形成FOV面的覆蓋,也可以與振鏡組合使用,配合點(diǎn)光源形成FOV面的覆蓋;
3.3.2 優(yōu)劣勢分析
優(yōu)勢:轉(zhuǎn)鏡式激光雷達(dá)的激光發(fā)射和接收裝置是固定的,所以即使有「旋轉(zhuǎn)機(jī)構(gòu)」,也可以把產(chǎn)品體積做小,進(jìn)而降低成本。并且旋轉(zhuǎn)機(jī)構(gòu)只有反射鏡,整體重量輕,電機(jī)軸承的負(fù)荷小,系統(tǒng)運(yùn)行起來更穩(wěn)定,壽命更長,是符合車規(guī)量產(chǎn)的優(yōu)勢條件。
劣勢:因?yàn)橛小感D(zhuǎn)機(jī)構(gòu)」這樣的機(jī)械形式的存在,便不可避免地在長期運(yùn)行之后,激光雷達(dá)的穩(wěn)定性、準(zhǔn)確度會(huì)受到影響。其次,一維式的掃描線數(shù)少,掃描角度不能到360度。
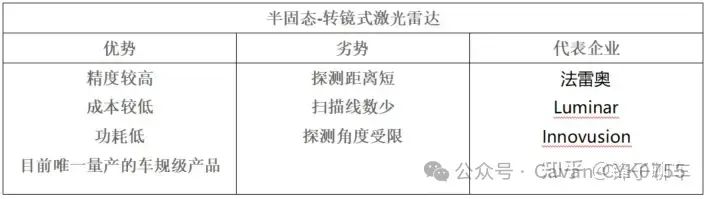
從應(yīng)用看,具備車規(guī)級量產(chǎn)實(shí)力的Tier1供貨商有法雷奧(Scala)、鐳神智能(CH32),Innovusion(Falcon)。2017年,奧迪A8為全球首款量產(chǎn)的L3級別自動(dòng)駕駛的乘用車,其搭載的激光雷達(dá)便是法雷奧和Ibeo聯(lián)合研發(fā)的4線旋轉(zhuǎn)掃描鏡激光雷達(dá)。2020年,鐳神智能自主研發(fā)的CH32面世,成為全球第二款獲得車規(guī)級認(rèn)證的轉(zhuǎn)鏡式激光雷達(dá),目前已經(jīng)規(guī)模化交付東風(fēng)悅享量產(chǎn)前裝車型生產(chǎn)。2022年,搭載Innovusion Falcon激光雷達(dá)的蔚來ET7上市,該款激光雷達(dá)為1550nm方案,等效300線數(shù)。從售價(jià)看,法雷奧Scala 2為900歐元(約6500元人民幣),已經(jīng)下降至車企可接受的價(jià)格范圍。
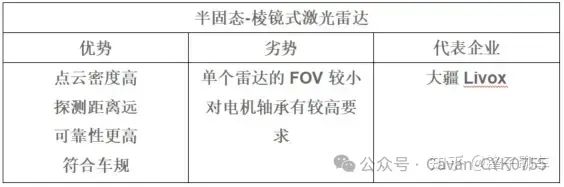
3.4 半固態(tài)-棱鏡式激光雷達(dá)
無人機(jī)龍頭廠商大疆孵化覽沃科技(Livox)入局激光雷達(dá),便是采用的棱鏡式掃描方案,大疆利用其在無人機(jī)領(lǐng)域積累的電機(jī)精準(zhǔn)調(diào)控技術(shù)及自動(dòng)化產(chǎn)線,有信心克服棱鏡軸承或襯套壽命的難題,也為其激光雷達(dá)技術(shù)構(gòu)筑護(hù)城河。
3.4.1 工作原理
棱鏡式激光雷達(dá)也稱為雙楔形棱鏡式激光雷達(dá),內(nèi)部包括兩個(gè)楔形棱鏡,激光在通過第一個(gè)楔形棱鏡后發(fā)生一次偏轉(zhuǎn),通過第二個(gè)楔形棱鏡后再一次發(fā)生偏轉(zhuǎn)。控制兩面棱鏡的相對轉(zhuǎn)速便可以控制激光束的掃描形態(tài)。與前面提到的掃描形式不同,棱鏡激光雷達(dá)累積的掃描圖案形狀狀若菊花,而并非一行一列的點(diǎn)云狀態(tài)。這樣的好處是只要相對速度控制得當(dāng),在同一位置長時(shí)間掃描幾乎可以覆蓋整個(gè)區(qū)域。
棱鏡式激光雷達(dá)工作示意圖
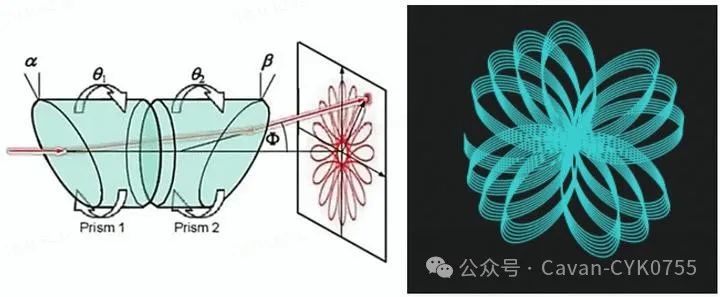
棱鏡及點(diǎn)云掃描示意圖
棱鏡式激光雷達(dá)工作圖
3.4.2 優(yōu)劣勢分析
優(yōu)勢:首先,該設(shè)計(jì)減少了激光發(fā)射和接收的線數(shù)以實(shí)現(xiàn)一幀之內(nèi)更高的線數(shù),也隨之降低了對焦與標(biāo)定的復(fù)雜度,因此生產(chǎn)效率得以大幅提升,并且相比于傳統(tǒng)機(jī)械式激光雷達(dá),棱鏡式的成本有了大幅的下降。其次,只要掃描時(shí)間夠久,就能得到精度極高的點(diǎn)云以及環(huán)境建模,分辨率幾乎沒有上限,且可達(dá)到近100%的視場覆蓋率。
劣勢:棱鏡式激光雷達(dá)FOV相對較小,且視場中心的掃描點(diǎn)非常密集,雷達(dá)的視場邊緣掃描點(diǎn)比較稀疏,在雷達(dá)啟動(dòng)的短時(shí)間內(nèi)會(huì)有分辨率過低的問題。對于高速移動(dòng)的汽車來說,顯然不存在長時(shí)間掃描的情況,不過可以通過增加激光線束和功率實(shí)現(xiàn)更高的精度和更遠(yuǎn)的探測距離,但機(jī)械結(jié)構(gòu)也相對更加復(fù)雜,體積讓前兩者更難以控制,存在軸承或襯套的磨損等風(fēng)險(xiǎn)。
從車規(guī)級應(yīng)用來看,小鵬P5配備2顆大疆Livox車規(guī)級棱鏡式激光雷達(dá),另外大疆Livox也獲得了一汽解放量產(chǎn)項(xiàng)目的定點(diǎn) 。針對單顆棱鏡式中心區(qū)域點(diǎn)云密集。兩側(cè)點(diǎn)云相對稀疏的情況,小鵬P5選擇在車前部署了2顆激光雷達(dá),前方提高至 180度的超寬點(diǎn)云視野,提高應(yīng)對近處車輛加塞、十字路口拐彎等復(fù)雜路況的通行能力。
小鵬P5上搭載的大疆Livox 棱鏡式激光雷達(dá)
3.5 固態(tài)-OPA激光雷達(dá)
針對車規(guī)級設(shè)備需要在連續(xù)振動(dòng)、高低溫、高濕高鹽等環(huán)境下連續(xù)工作的特點(diǎn),固態(tài)激光雷達(dá)成為了較為可行的發(fā)展方向。
3.5.1 工作原理
利用光的相干性質(zhì),通過人為控制相位差實(shí)現(xiàn)不同方向的光發(fā)射效果;
我們知道光和電磁波一樣也表現(xiàn)出波的特性,因此同樣可以利用相位差控制干涉讓激光“轉(zhuǎn)向”特定的角度,往復(fù)控制實(shí)現(xiàn)掃描效果。
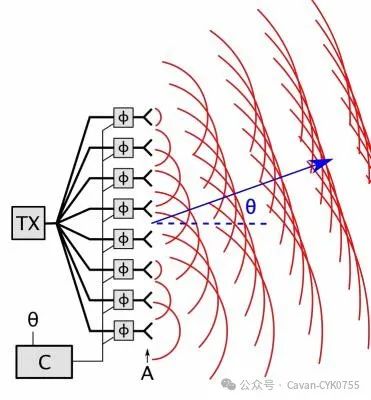
OPA光學(xué)相控工作原理示意圖
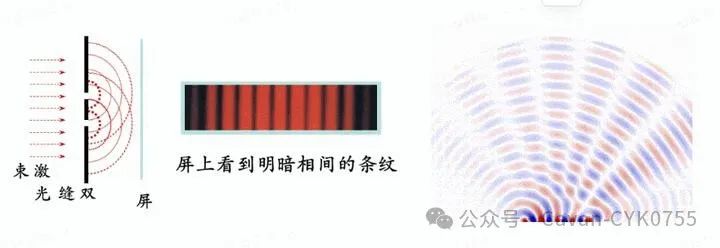
相干與掃描原理圖示意圖
3.5.2 優(yōu)劣勢分析
優(yōu)勢:OPA激光雷達(dá)發(fā)射機(jī)采用純固態(tài)器件,沒有任何需要活動(dòng)的機(jī)械結(jié)構(gòu),因此在耐久度上表現(xiàn)更出眾;雖然省去機(jī)械掃描結(jié)構(gòu),但卻能做到類似機(jī)械式的全景掃描,同時(shí)在體積上可以做得更小,量產(chǎn)后的成本有望大大降低。
劣勢:OPA激光雷達(dá)對激光調(diào)試、信號處理的運(yùn)算力要求很大,同時(shí),它還要求陣列單元尺寸必須不大于半個(gè)波長,因此每個(gè)器件尺寸僅500nm左右,對材料和工藝的要求都極為苛刻,由于技術(shù)難度高,上游產(chǎn)業(yè)鏈不成熟,導(dǎo)致 OPA 方案短期內(nèi)難以車規(guī)級量產(chǎn),目前也很少有專注開發(fā)OPA激光雷達(dá)的Tier1供應(yīng)商。
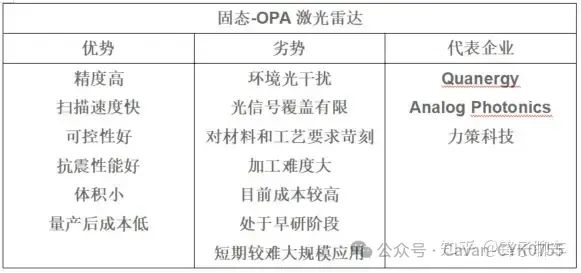
應(yīng)用層面,目前暫無車規(guī)級量產(chǎn)案例,OPA方案的代表企業(yè)為Quanergy。2021年8月,Quanergy對其OPA固達(dá)態(tài)激光雷達(dá)S3系列完成駕駛實(shí)測演示。測試結(jié)果顯示,S3系列固態(tài)激光雷達(dá)可以提供超過10萬小時(shí)的平均無故障時(shí)間(MTBF),在全光照下實(shí)現(xiàn)100米的探測性能,大規(guī)模量產(chǎn)后的目標(biāo)價(jià)格為500美元。
3.6 固態(tài)-FLASH激光雷達(dá)
由于結(jié)構(gòu)簡單,F(xiàn)lash閃光激光雷達(dá)是目前純固態(tài)激光雷達(dá)最主流的技術(shù)方案。但是由于短時(shí)間內(nèi)發(fā)射大面積的激光,因此在探測精度和探測距離上會(huì)受到較大的影響,主要用于較低速的無人駕駛車輛,例如無人外賣車、無人物流車等,對探測距離要求較低的自動(dòng)駕駛解決方案中。
3.6.1 工作原理
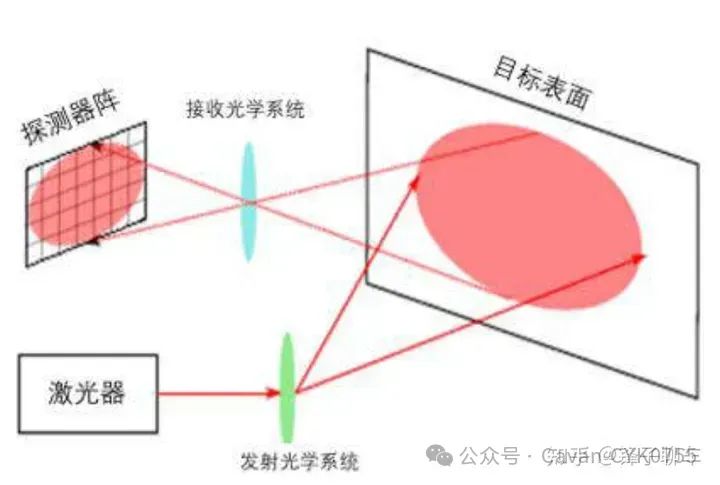
Flash原本的意思為快閃。而Flash激光雷達(dá)的原理也是快閃,不像MEMS或OPA的方案會(huì)去進(jìn)行掃描,而是短時(shí)間直接發(fā)射出一大片覆蓋探測區(qū)域的激光,再以高度靈敏的接收器,來完成對環(huán)境周圍圖像的繪制。因此,F(xiàn)lash固態(tài)激光雷達(dá)屬于非掃描式雷達(dá),發(fā)射面陣光,是以2維或3維圖像為重點(diǎn)輸出內(nèi)容的激光雷達(dá)。某種意義上,它有些類似于黑夜中的照相機(jī),光源由自己主動(dòng)發(fā)出。
Flash激光雷達(dá)的成像原理是發(fā)射大面積激光一次照亮整個(gè)場景,然后使用多個(gè)傳感器接收檢測和反射光。但最大的問題是,這種工作模式需要非常高的激光功率。在體積限制下,F(xiàn)lash激光雷達(dá)的功率密度不能很高。因此,F(xiàn)lash激光雷達(dá)目前的問題是,由于功率密度的限制,無法考慮三個(gè)參數(shù):視場角、檢測距離和分辨率,即如果檢測距離較遠(yuǎn),則需要犧牲視場角或分辨率;如果需要高分辨率,則需要犧牲視場角或檢測距離。
Flash激光雷達(dá)采用面光源泛光成像,其發(fā)射的光線會(huì)散布在整個(gè)視場內(nèi),因此不需要折射就可以覆蓋FOV區(qū)域了,難點(diǎn)在于如何提升其功率密度從而提升探測精度和距離,目前通常使用VCSEL光源組成二維矩陣形成面光源;
亮道智能的Flash激光雷達(dá)
3.6.2 優(yōu)劣勢分析
優(yōu)點(diǎn):FLASH激光雷達(dá)最大的優(yōu)勢在于可以一次性實(shí)現(xiàn)全局成像來完成探測,且成像速度快。體積小,易安裝,易融入車的整體外觀設(shè)計(jì)。設(shè)計(jì)簡潔,元件極少,成本低。信號處理電路簡單,消耗運(yùn)算資源少,整體成本低。刷新頻率可高達(dá)3MHz,是傳統(tǒng)攝像頭的10萬倍,實(shí)時(shí)性好,因此易過車規(guī)。
缺點(diǎn):不過FLASH激光單點(diǎn)面積比掃描型激光單點(diǎn)大,因此其功率密度較低,進(jìn)而影響到探測精度和探測距離(低于50米)。要改善其性能,需要使用功率更大的激光器,或更先進(jìn)的激光發(fā)射陣列,讓發(fā)光單元按一定模式導(dǎo)通點(diǎn)亮,以取得掃描器的效果。
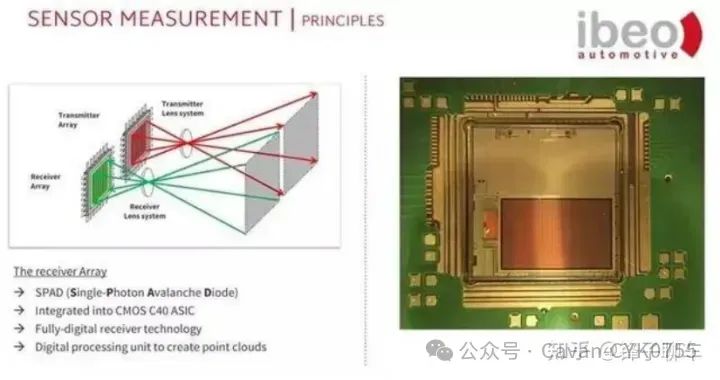
Ibeo FLASH激光雷達(dá)的接收模塊
為了克服探測距離的限制,F(xiàn)LASH激光雷達(dá)的代表廠商Ibeo、LedderTech開始在激光收發(fā)模塊進(jìn)行創(chuàng)新。車規(guī)級激光雷達(dá)鼻祖Ibeo,則一步到位推出了單光子激光雷達(dá),Ibeo稱其為Focal Plane Array焦平面,實(shí)際也可歸為FlASH激光雷達(dá)。2019年8月27日,長城汽車與德國激光雷達(dá)廠商Ibeo正式簽署了激光雷達(dá)技術(shù)戰(zhàn)略合作協(xié)議,三方合作的產(chǎn)品基礎(chǔ)就是ibeonEXT Generic 4D Solid State LiDAR。從長遠(yuǎn)來看,F(xiàn)LASH激光雷達(dá)芯片化程度高,規(guī)模化量產(chǎn)后大概率能拉低成本,隨著技術(shù)的發(fā)展,F(xiàn)LASH激光雷達(dá)有望成為主流的技術(shù)方案。
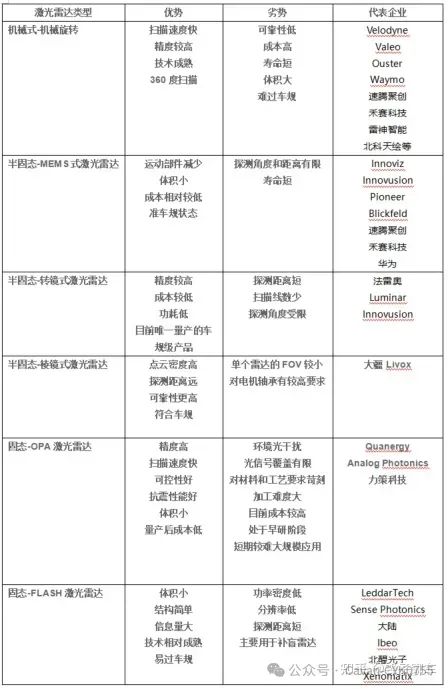
對這幾款激光雷達(dá)優(yōu)劣勢進(jìn)行了匯總:
四、激光光源
由于激光器發(fā)射的光線需要投射至整個(gè)FOV平面區(qū)域內(nèi),除了面光源可以直接發(fā)射整面光線外,點(diǎn)光源則需要做二維掃描覆蓋整個(gè)FOV區(qū)域,線光源需要做一維掃描覆蓋整個(gè)FOV區(qū)域。
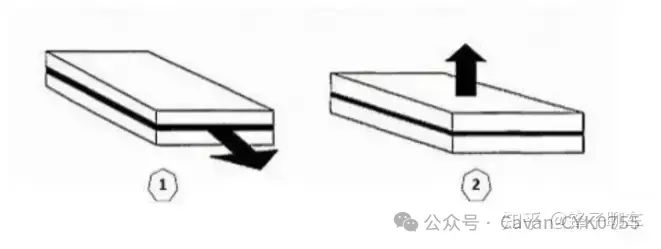
其中點(diǎn)光源根據(jù)光源發(fā)射的形式又可以分為EEL(Edge-Emitting Laser邊發(fā)射激光器)和VCSEL(Vertical-Cavity Surface-Emitting Laser垂直腔面發(fā)射激光器)兩種,二者區(qū)別在于EEL激光平行于襯底表面發(fā)出(如圖1),VCSEL激光垂直于襯底表面發(fā)出(如圖2)。
其中VCSEL式易于進(jìn)行芯片式陣列布置,通常使用此類光源進(jìn)行陣列式布置形成線光源(一維陣列)或面光源(二維陣列),VCSEL光源剖面圖與二維陣列光源芯片示意圖如下
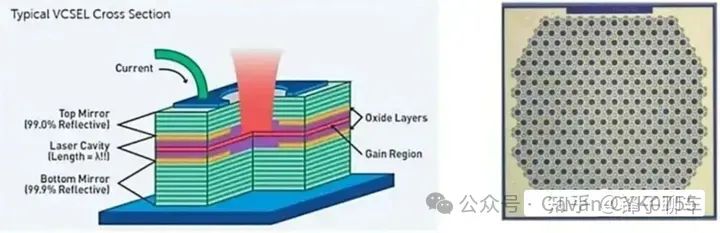
VCSEL剖面與二維陣列示意圖
五、其它常見術(shù)語釋義
測遠(yuǎn)能力:一般指激光雷達(dá)對于10%低反射率目標(biāo)物的最遠(yuǎn)探測距離。
最近測量距離:激光雷達(dá)能夠輸出可靠探測數(shù)據(jù)的最近距離。
測距盲區(qū):從激光雷達(dá)外罩到最近測量距離之間的范圍,這段距離內(nèi)激光雷達(dá)無法獲取有效的測量信號,無法對目標(biāo)物信息進(jìn)行反饋。
角度盲區(qū):激光雷達(dá)視場角范圍沒有覆蓋的區(qū)域,系統(tǒng)無法獲取這些區(qū)域內(nèi)的目標(biāo)物信息。
角度分辨率:激光雷達(dá)相鄰兩個(gè)探測點(diǎn)之間的角度間隔,分為水平角度分辨率與垂直角度分辨率。相鄰探測點(diǎn)之間角度間隔越小,對目標(biāo)物的細(xì)節(jié)分辨能力越強(qiáng)。
測距精度:激光雷達(dá)對同一距離下的物體多次測試所得數(shù)據(jù)之間的一致程度,精度越高表示測量的隨機(jī)誤差越小。
測距準(zhǔn)度:激光雷達(dá)探測得到距離數(shù)據(jù)與真值之間的差距,準(zhǔn)度越高表示測量結(jié)果與真實(shí)數(shù)據(jù)符合程度越高。
點(diǎn)頻:激光雷達(dá)每秒完成探測并獲取的探測點(diǎn)的數(shù)目。
抗干擾:激光雷達(dá)對工作同一環(huán)境下、采用相同激光波段的其他激光雷達(dá)的干擾信號的抵抗能力,抗干擾能力越強(qiáng)說明在多臺(tái)激光雷達(dá)共同工作的條件下產(chǎn)生的噪點(diǎn)率越低
功耗:激光雷達(dá)系統(tǒng)工作狀態(tài)下所消耗的電功率。
激光雷達(dá)線數(shù):一般指激光雷達(dá)垂直方向上的測量線的數(shù)量,對于一定的角度范圍,線數(shù)越多代表角度分辨率越高,對目標(biāo)物的細(xì)節(jié)分辨能力越強(qiáng)。
多傳感器標(biāo)定:將多傳感器得到的各自局部空間坐標(biāo)下的測量數(shù)據(jù)轉(zhuǎn)換到一個(gè)統(tǒng)一的空間坐標(biāo)系的過程。
可靠性:一般指產(chǎn)品可靠性,是組件、產(chǎn)品、系統(tǒng)在一定時(shí)間內(nèi)、在一定條件下無故障地執(zhí)行指定功能的能力或可能性。
安全性:產(chǎn)品在使用、儲(chǔ)運(yùn)、銷售等過程中,保障人體健康和人身、財(cái)產(chǎn)安全免受傷害或損失的能力或可能性,包括功能安全、網(wǎng)絡(luò)安全、激光安全等。
大生命力的浪潮正推動(dòng)著中國品牌向世界一流的材料方案服務(wù)商邁進(jìn)。
-
傳感器
+關(guān)注
關(guān)注
2551文章
51097瀏覽量
753529 -
激光雷達(dá)
+關(guān)注
關(guān)注
968文章
3972瀏覽量
189917 -
LIDAR
+關(guān)注
關(guān)注
10文章
326瀏覽量
29423
發(fā)布評論請先 登錄
相關(guān)推薦
激光雷達(dá)分類以及應(yīng)用
常見激光雷達(dá)種類
消費(fèi)級激光雷達(dá)的起航
固態(tài)設(shè)計(jì)激光雷達(dá)
激光雷達(dá)和相機(jī)之間的外參標(biāo)定
最佳防護(hù)——激光雷達(dá)與安防監(jiān)控解決方案
由iphone12說說激光雷達(dá) FMCW激光雷達(dá) 精選資料分享
激光雷達(dá)LIDAR的工作原理及特點(diǎn)應(yīng)用分析
LiDAR激光雷達(dá)技術(shù)原理及Arduino示例代碼糾錯(cuò)
Mobility LiDAR系列激光雷達(dá)突破固態(tài)激光雷達(dá)的局限
汽車激光雷達(dá)是什么 工作原理是什么
簡述激光雷達(dá)的結(jié)構(gòu)原理分類及特點(diǎn) TIM320激光雷達(dá)的工作原理
什么是激光雷達(dá)?LiDAR系統(tǒng)的工作原理及解決方案






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論