 集成微流控功能模塊的可重編程磁控柔性驅動器制備工藝
集成微流控功能模塊的可重編程磁控柔性驅動器制備工藝
磁控柔性驅動器通常由具備磁響應變形能力的柔性復合材料制備獲得,在外加磁場的驅動、控制、引導下,可實現非接觸式的連續形變、靈活運動、物質遞送等功能。磁場驅動憑借其中低頻磁場安全性高、可穿透人體組織而不發生明顯衰減、通過電信號可實現精準控制等優勢,近年來在生物醫療領域展現了廣闊的應用前景,也逐漸成為了學科交叉和前沿探索的研究熱點。然而,傳統的磁控柔性驅動器在制備后其磁分布也隨之確定,所以目前缺乏一種具備可重編程能力、能夠高效集成其他功能模塊的磁控柔性驅動器。
近日,清華大學深圳國際研究生院彌勝利教授團隊報道了一種像素組裝式的磁控柔性驅動器的制備工藝,可應用于低成本、可回收、可重編程的磁控驅動器的構建,實現定制化結構變形與仿生運動(抓取、游泳、蠕動等),并集成微流控功能模塊,可用于開關閥控制、曲率調節、動態芯片結構與液體藥物遞送機器人等。
相關研究成果以“Reprogrammable Magnetic Soft Actuators with Microfluidic Functional Modules via Pixel-Assembly”為題發表在《Small》期刊上。本文通訊作者為清華大學深圳國際研究生院彌勝利教授。第一作者為清華大學深圳國際研究生院2023級博士生趙笑宇。該工作得到了國家自然科學基金委和深圳市發展和改革委員會戰略性新興產業發展專項資金扶持計劃的支持。
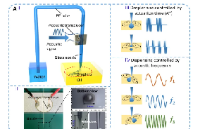
在該項工作中,團隊利用PDMS-NdFeB混合物所制備的像素點與硅膠薄膜之間基于倫敦色散力可逆粘附作用,通過運用旋涂、打孔、充磁的方法建立了磁性像素點的基本單元庫。根據預期變形設計結構的磁分布,進而基于粘貼組裝的簡易方式構建了具備重編程能力的磁驅動柔性驅動器,如圖1所示。
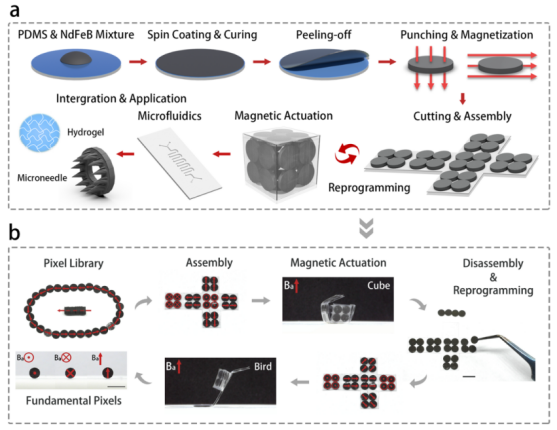
圖1 像素化組裝磁控柔性驅動器
隨后,研究團隊構建了多樣化功能的磁控柔性驅動器,實現了折紙、剪紙、圖案化變形(圖2),以及六爪抓取、樹葉飄動、章魚游泳、蠕蟲蠕動等仿生運動(圖3)。
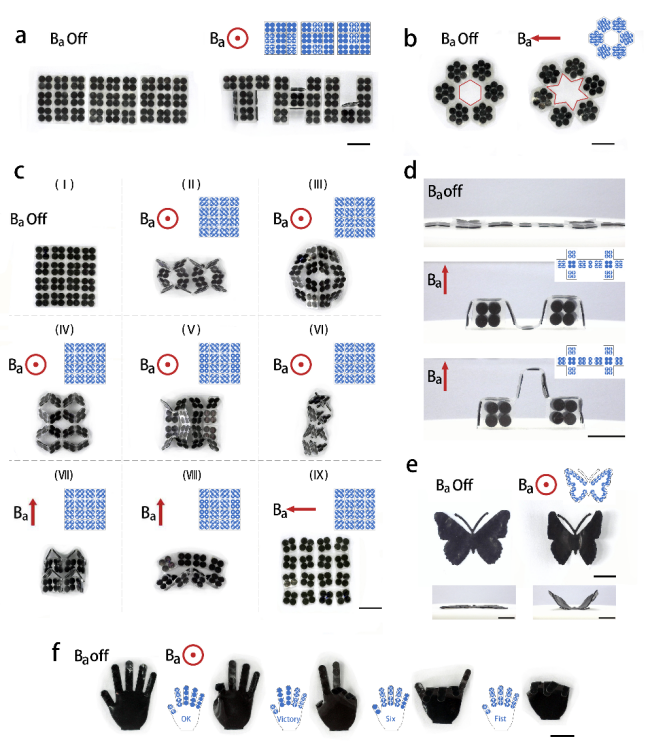
圖2 具備不同磁分布的磁控柔性驅動器在磁場響應下的變形
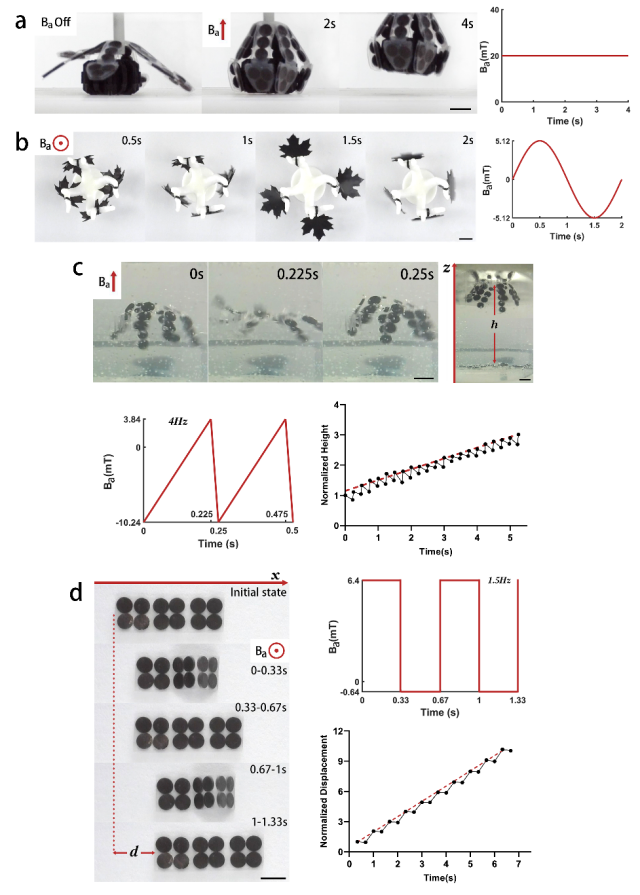
圖3 多種運動模式的仿生磁控驅動器
接著,研究團隊將微流控功能模塊集成到硅膠基底層,應用于微流控芯片的開關閥控制、芯片曲率調節、流體混合、動態微流控芯片結構的構建,并開發了一款用于液態藥物遞送的磁驅動爬行機器人。該機器人結合毒牙式微針,具備體內定點藥物釋放的應用潛力,如圖4所示。該微針陣列的12根微針均勻分布在圓環基底上,單個針體呈圓錐形毒牙狀,底部直徑為250 μm,高度為450 μm,SEM圖像顯示了微針的毒牙狀形貌(圖4g)。
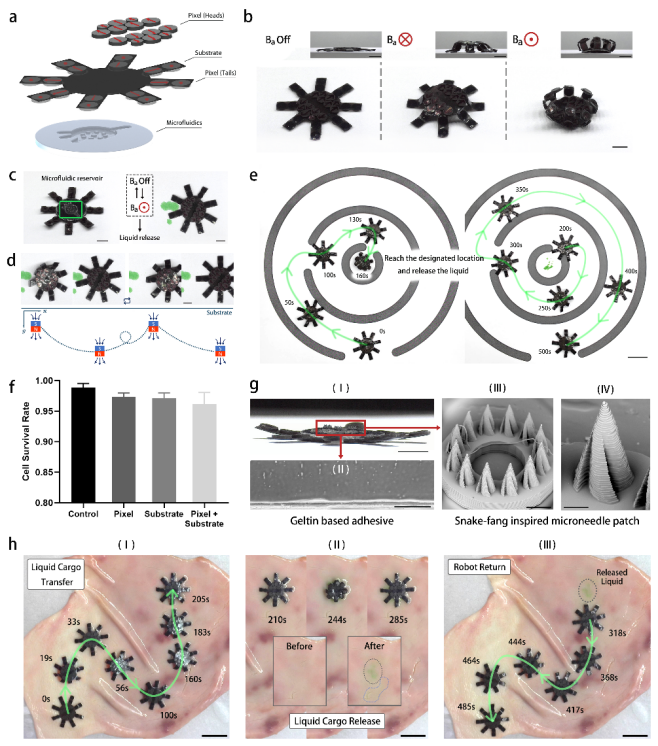
圖4 磁驅動液態藥物遞送機器人
綜上所述,本研究提出了一種基于像素化組裝的磁控柔性驅動器的制備工藝,建立了磁性像素點所構成的基本單元庫,通過粘貼組裝的方式構建具備各類可重編程磁分布的結構。這些結構展現了多樣化、可拓展的變形與仿生運動,同時為微流控功能模塊的集成提供了接口,從而在磁場驅動下實現了開關閥、曲率控制、流體混合、動態三維微流控結構和液體遞送機器人等應用。然而,為實現更廣泛的應用,還需要解決一些限制因素:利用自動化設備來取代繁瑣的手工裝配;提高像素的精度,并實現批量生產;通過更精密的磁驅動平臺實現復雜任務中的高精度磁場操縱等。
論文鏈接:
https://doi.org/10.1002/smll.202310009
審核編輯:劉清
-
驅動器
+關注
關注
53文章
8252瀏覽量
146449 -
機器人
+關注
關注
211文章
28455瀏覽量
207266 -
微流控芯片
+關注
關注
13文章
274瀏覽量
18844 -
電信號
+關注
關注
1文章
818瀏覽量
20596
原文標題:集成微流控功能模塊的可重編程磁控柔性驅動器
文章出處:【微信號:Micro-Fluidics,微信公眾號:微流控】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
LED驅動器常見故障解決
ATA-1372A寬帶功率放大器在超聲驅動噴嘴微液滴制備中的應用
NS1716 ESOP-8封裝 內置 MOS 管開關降壓型 LED 恒流驅動器

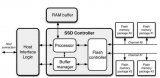
SSD架構與功能模塊詳解
plc控制伺服驅動器編程實例介紹
中微愛芯推出單通道低邊柵驅動器AiP44175
微芯科技為eVTOL飛機開發集成驅動電源解決方案

JYS5331手電筒/電動車/全亮、暗亮、爆閃三功能開關LED恒流驅動芯片

Microchip推出3.3 kV XIFM 即插即用mSiC? 柵極驅動器 進一步擴展其mSiC 解決方案,加速高壓SiC 電源模塊采用
淺談微流控芯片技術






 工商網監
工商網監
評論