") 超高性?xún)r(jià)比 ARM Cortex -A53教學(xué)實(shí)驗(yàn)箱快來(lái)提走
超高性?xún)r(jià)比 ARM Cortex -A53教學(xué)實(shí)驗(yàn)箱快來(lái)提走
基于Samsung S5P6818,ARM Cortex-A53八核處理器,主頻1.4GHz,集成Mali-400 MP4圖形處理器,支持3D圖形流暢運(yùn)行,支持1080P大尺寸高清視頻播放。

實(shí)驗(yàn)箱含實(shí)驗(yàn)板、7寸觸摸屏、7寸全鍵盤(pán),可選20多種拓展模塊。
實(shí)驗(yàn)箱支持:音頻輸入輸出接口、攝像頭接口、電機(jī)接口、ADC、Ethernet、UART、RTC、LCD、HDMI、USB HOST、USB OTG、SPI、IIC、GPIO、SD等外設(shè)與接口。適用于嵌入式系統(tǒng)、物聯(lián)網(wǎng)、無(wú)線傳感器、人工智能等教學(xué)領(lǐng)域。


丨?
實(shí)驗(yàn)內(nèi)容豐富,滿足多場(chǎng)景教學(xué)需求
創(chuàng)龍教儀提供豐富的教學(xué)實(shí)驗(yàn)案例,讓學(xué)生更全面地了解 ARM 人工智能、傳感器、物聯(lián)網(wǎng)相關(guān)知識(shí)與應(yīng)用,實(shí)驗(yàn)類(lèi)別如下表:
第一章 | Linux 實(shí)驗(yàn)環(huán)境搭建與 Linux 開(kāi)發(fā)基礎(chǔ) |
第二章 | Linux 系統(tǒng)移植開(kāi)發(fā)實(shí)驗(yàn) |
第三章 | Linux 驅(qū)動(dòng)開(kāi)發(fā)實(shí)驗(yàn) |
第四章 | Linux應(yīng)用開(kāi)發(fā)實(shí)驗(yàn) |
第五章 | Linux Qt 形界面開(kāi)發(fā)實(shí)驗(yàn) |
創(chuàng)龍教儀提供保姆式實(shí)驗(yàn)操作教程,提供教學(xué)實(shí)驗(yàn)手冊(cè)、教學(xué)實(shí)驗(yàn)視頻,在明確重點(diǎn)知識(shí)的前提下,指導(dǎo)學(xué)生一步步操作,幫助快速打好專(zhuān)業(yè)基礎(chǔ)。手冊(cè)內(nèi)容如下表:
實(shí)驗(yàn)?zāi)康?/strong> | 幫助學(xué)生理解實(shí)驗(yàn)重點(diǎn)并掌握知識(shí)點(diǎn)運(yùn)用。 |
實(shí)驗(yàn)原理 | 包含模塊原理圖、源碼解析、現(xiàn)象原理等,幫助學(xué)生理解實(shí)驗(yàn)現(xiàn)象的實(shí)現(xiàn)方式。 |
實(shí)驗(yàn)設(shè)備 | 介紹實(shí)驗(yàn)所需的硬件設(shè)備、軟件設(shè)備等,讓學(xué)生提前做好實(shí)驗(yàn)準(zhǔn)備,節(jié)約時(shí)間成本。 |
實(shí)驗(yàn)步驟 | 詳細(xì)介紹實(shí)驗(yàn)操作步驟,包含源碼編譯、硬件連接、軟件操作等,幫助學(xué)生快速上手。 |


向下滑動(dòng)查看所有內(nèi)容
這是一條分割線
丨?
案例分享:3-2 PWM 驅(qū)動(dòng)實(shí)驗(yàn)
一、實(shí)驗(yàn)?zāi)康?/strong>
熟悉基本字符設(shè)備的驅(qū)動(dòng)程序設(shè)計(jì),掌握在Linux系統(tǒng)下PWM的使用方法并通過(guò)應(yīng)用程序驗(yàn)證蜂鳴器驅(qū)動(dòng)。
二、實(shí)驗(yàn)原理
根據(jù)原理圖,可知使用的是無(wú)源蜂鳴器。
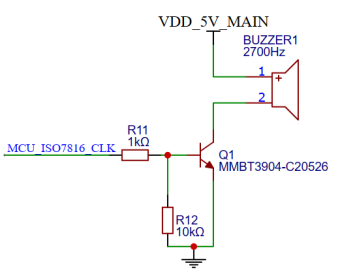
PWM控制
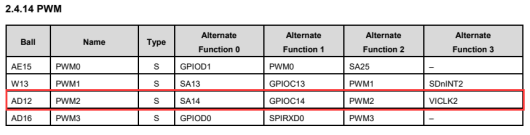
通過(guò)輸出PWM控制蜂鳴器,MCU_ISO7816_CLK管腳為SA14/GPIOC14/PWM2/VICLK2,可以查看數(shù)據(jù)冊(cè)"Datasheet\CPU\Nexell-S5P6818.pdf"查看PWM管腳的相關(guān)介紹。
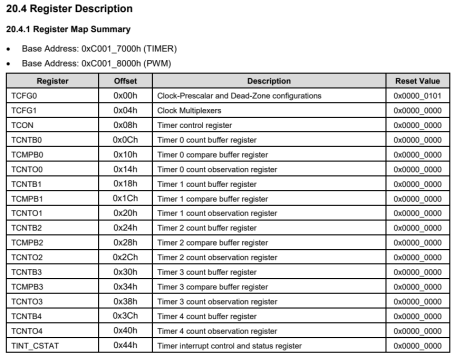
PWM輸出腳,默認(rèn)為低電平,PWM計(jì)數(shù)器TCNTn的初始值等于TCNTBn,當(dāng)TCNTn的值遞減到等于TCMPBn的值時(shí),PWM輸出高電平,當(dāng)PWM計(jì)數(shù)器的遞減到0時(shí),輸出又變?yōu)榈碗娖剑绱酥芏鴱?fù)始。
程序框架
1、可以在Ubuntu中查看相關(guān)驅(qū)動(dòng)代碼。
2、打開(kāi)驅(qū)動(dòng)代碼。蜂鳴器驅(qū)動(dòng)實(shí)現(xiàn)為一個(gè)字符設(shè)備,通過(guò) ioctl 函數(shù)來(lái)設(shè)置相關(guān)寄存器的值以此來(lái)實(shí)現(xiàn)PWM 波形的輸出與禁止。
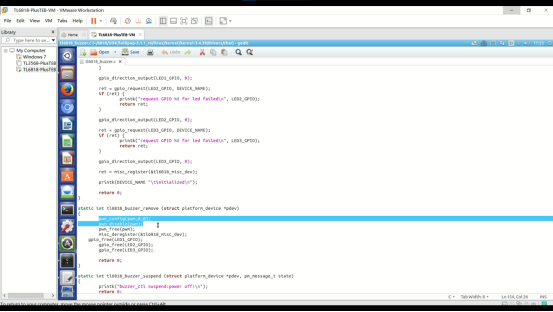
3、首先查看驅(qū)動(dòng)入口函數(shù),在入口函數(shù)中申請(qǐng)了PWM。
4、接著為防止驅(qū)動(dòng)加載后直接響起,則使用了pwm_config和pwm_disable,分別是將占空比設(shè)置為0和禁用此PWM。
5、當(dāng)在應(yīng)用層使用ioctl的時(shí)候,會(huì)對(duì)應(yīng)到函數(shù)操作,這里的pwm_config,第一個(gè)參數(shù)是設(shè)置占空比是以有效時(shí)間,第二個(gè)參數(shù)是設(shè)置周期。pwm_enable則為啟用此PWM。
三、實(shí)驗(yàn)步驟實(shí)驗(yàn)設(shè)備
本實(shí)驗(yàn)中使用的軟件為VMware17+Ubuntu 14.04 和串口調(diào)試工具Xshell。
本實(shí)驗(yàn)中使用的是TL6818-PlusTEB實(shí)驗(yàn)箱,所需的配件為Micro SD卡、讀卡器、電源、Micro USB、RS232 交叉串口母線和USB 轉(zhuǎn) RS232 串口線。

編譯源碼
(1)打開(kāi)Ubuntu,將Demo文件夾拷貝到6818目錄下。
(2)執(zhí)行指令進(jìn)入內(nèi)核文件夾里面,然后輸入命令進(jìn)入內(nèi)核菜單。
(3)在內(nèi)核菜單,通過(guò)電腦鍵盤(pán)的上下左右按鍵、Enter鍵控制進(jìn)入相應(yīng)目錄。
(4)選擇BUZZER驅(qū)動(dòng),關(guān)閉motor驅(qū)動(dòng)。“*”代表選擇,通過(guò)空格鍵控制。
(5)然后選擇exit,按下enter鍵不斷退出。
(6)退出到最后提示是否保存,選擇Yes,按下enter鍵退出。
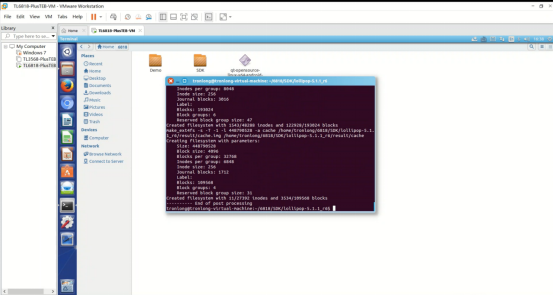
(7)然后執(zhí)行命令返回SDK目錄,編譯整個(gè)SDK。
(8)等待編譯完成,生成新的uImage。
文件拷貝
(1)將SD系統(tǒng)啟動(dòng)卡通過(guò)讀卡器連接到計(jì)算機(jī),虛擬機(jī)Ubuntu系統(tǒng)會(huì)自動(dòng)識(shí)別SD系統(tǒng)啟動(dòng)卡,點(diǎn)擊連接到Ubuntu。
(2)進(jìn)入uImage目錄,然后輸入命令將uImage更新到卡里面。
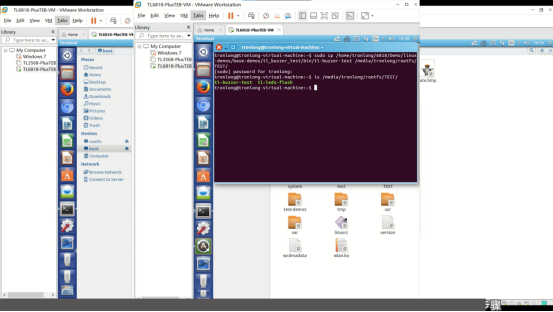
(3)在Ubuntu中,執(zhí)行以下命令,在SD卡內(nèi)建立一個(gè)目錄用于放置執(zhí)行文件,如果已有相應(yīng)的文件夾,則跳過(guò)創(chuàng)建文件夾的步驟。
(4)將測(cè)試文件拷貝到SD的目錄。
(5) 拷貝完成后,彈出SD卡。
硬件連接
(1)插入SD卡。
(2)使用RS232交叉串口母線和USB轉(zhuǎn)RS232串口線連接實(shí)驗(yàn)箱的UART0和電腦的USB口。
(3)設(shè)置撥碼開(kāi)關(guān)為SD卡啟動(dòng)模式100。
(4)使用Micro USB線連接實(shí)驗(yàn)箱的USB OTG和電腦的USB口。
(5)連接電源線,先不要上電。

軟件操作
接著進(jìn)行軟件部分操作。
(1)先在設(shè)備管理器查看串口的端口號(hào)。
(2)再設(shè)置串口調(diào)試工具,波特率設(shè)置為115200,點(diǎn)擊連接,在Xshell調(diào)試終端會(huì)顯示連接成功。
(3)連接成功后,撥動(dòng)實(shí)驗(yàn)箱的電源開(kāi)關(guān),將實(shí)驗(yàn)箱上電。
(4)等待系統(tǒng)登錄SD卡系統(tǒng)。
(5)登錄成功后,在串口調(diào)試窗口執(zhí)行以下命令,進(jìn)入測(cè)試程序所在目錄,運(yùn)行程序。
(6)程序運(yùn)行后蜂鳴器響起4聲,說(shuō)明蜂鳴器驅(qū)動(dòng)正常。同時(shí)串口調(diào)試窗口打印相關(guān)信息。
(7)實(shí)結(jié)束后,實(shí)驗(yàn)箱斷電,取下SD卡,將SD系統(tǒng)啟動(dòng)卡通過(guò)讀卡器連接到計(jì)算機(jī),連接到Ubuntu,執(zhí)行命今替換回原來(lái)的ulmage文件。

-
處理器
+關(guān)注
關(guān)注
68文章
19286瀏覽量
229841 -
ARM
+關(guān)注
關(guān)注
134文章
9097瀏覽量
367552 -
Cortex
+關(guān)注
關(guān)注
2文章
202瀏覽量
46498
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
智能機(jī)械臂人臉識(shí)別特效丨國(guó)產(chǎn)Cortex-A55人工智能實(shí)驗(yàn)箱案例分享

智能目標(biāo)顏色識(shí)別抓取丨國(guó)產(chǎn)Cortex-A55人工智能實(shí)驗(yàn)箱機(jī)械臂案例分享
國(guó)產(chǎn)Cortex-A55高性能人工智能實(shí)驗(yàn)箱機(jī)械臂姿態(tài)識(shí)別案例
為什么更推薦Cortex-A55教學(xué)實(shí)驗(yàn)箱?我來(lái)告訴您!
高校嵌入式教學(xué)實(shí)驗(yàn)箱,開(kāi)啟智慧教學(xué)新篇章
ARM Cortex-A53嵌入式開(kāi)發(fā)平臺(tái)Android手冊(cè)
雙DSP C2000+C5000高性?xún)r(jià)比教學(xué)實(shí)驗(yàn)箱
適用于ARM Cortex?—A53處理器和FPGA TPS65219 數(shù)據(jù)表

適用于 ARM Cortex?—A53 處理器TPS65219-Q1數(shù)據(jù)表
適用于ARM Cortex?—A53處理器A53處理器和FPGA的集成電源管理IC TPS65220數(shù)據(jù)表
創(chuàng)龍教儀基于瑞芯微3568的ARM Cortex A-55教學(xué)實(shí)驗(yàn)箱 適用于人工智能 傳感器 物聯(lián)網(wǎng)等領(lǐng)域
適用于ARM Cortex?—A53處理器和 FPGA的集成電源管理IC TPS65220數(shù)據(jù)表
適用于ARM Cortex—A53處理器和FPGA TPS65219數(shù)據(jù)表
適用于ARM Cortex?—A53 處理器TPS65219-Q1數(shù)據(jù)表
適用于AM64x Arm?Cortex?-A53 處理器的TPS6521855 電源管理 IC數(shù)據(jù)表





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論