") 康謀分享|aiSim5激光雷達(dá)LiDAR模型驗(yàn)證方法(二)
康謀分享|aiSim5激光雷達(dá)LiDAR模型驗(yàn)證方法(二)
aiSim中的LiDAR是一種基于光線追蹤的傳感器,能夠模擬真實(shí)LiDAR發(fā)射的激光束,將會(huì)生成LAS v1.4標(biāo)準(zhǔn)格式的3D點(diǎn)云,包含了方位角、俯仰角和距離等。
aiSim能夠模擬LiDAR單態(tài)(Monostatic)和同軸(Coaxial)配置。在aiSim中,LiDAR仿真是將模型建為在某個(gè)方向上發(fā)射單束光線的點(diǎn)光源,因此,單束光線承載了激光的全部功率。
一、與不同形式降水的相互作用
LiDAR傳感器與不同形式的降水有相互作用:
1、雨天
aiSim的LiDAR模型不會(huì)將雨滴視為影響激光反射的幾何形狀,而是基于強(qiáng)度和3D坐標(biāo),添加噪聲,從而模擬降雨對(duì)于ADAS中LiDAR性能的衰減。
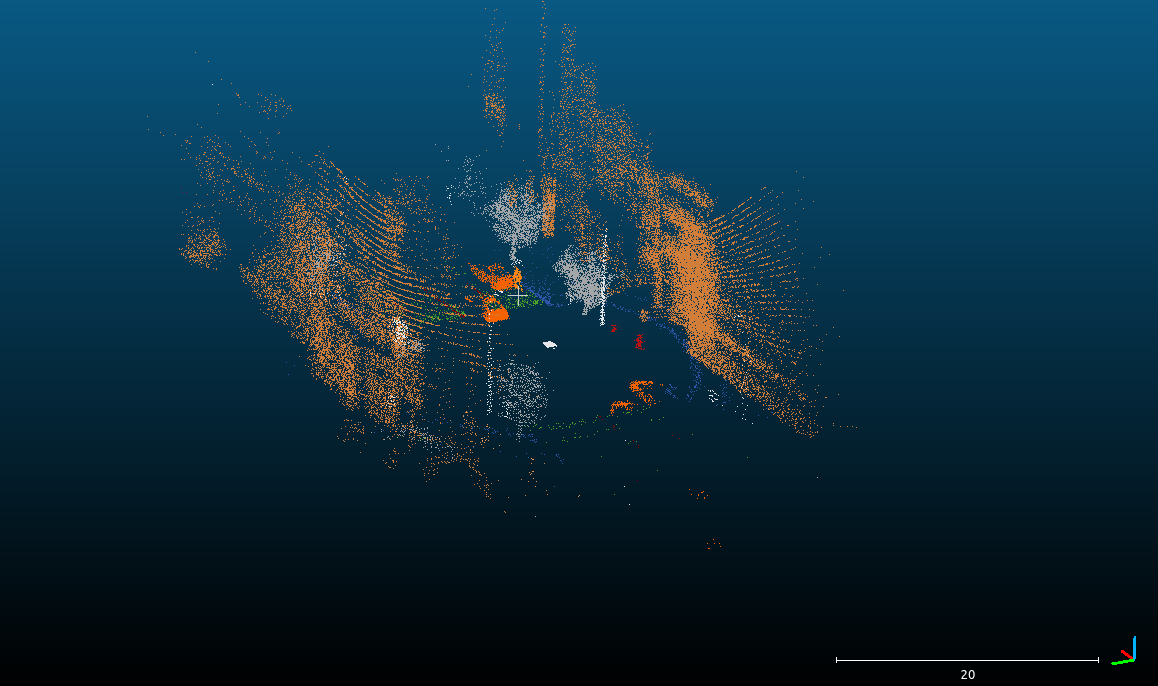 圖1:雨天aiSim5激光雷達(dá)點(diǎn)云(2L)
圖1:雨天aiSim5激光雷達(dá)點(diǎn)云(2L)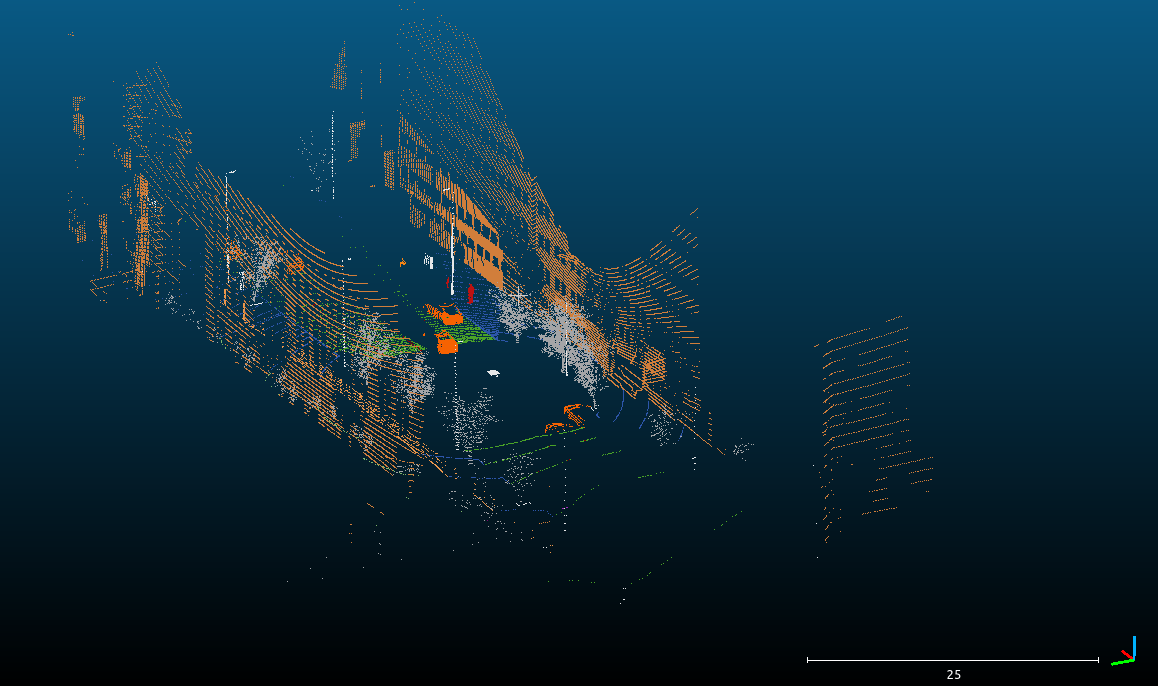 圖2:晴天aiSim5激光雷達(dá)點(diǎn)云(2L)
圖2:晴天aiSim5激光雷達(dá)點(diǎn)云(2L)對(duì)于雨天的衰減,主要使用公式:
e^(-2·R·γ)
其中R是接收器到物體的距離;γ為大氣消光系數(shù),晴天則為0。
2、霧天
aiSim在仿真中設(shè)定“濃霧”中水滴半徑為5μm,可調(diào)整空氣中水滴的數(shù)量來控制霧氣的大小,同樣采用了與雨天相同的衰減公式。
3、雪天
aiSim仿真的激光光束一旦擊中雪花時(shí),aiSim AIR引擎就會(huì)計(jì)算返回光束的強(qiáng)度。考慮雪花表面的不規(guī)則性,其將會(huì)被視為白色漫反射模型,將會(huì)導(dǎo)致光束在多個(gè)方向上散射,從而影響返回信號(hào)的強(qiáng)度和質(zhì)量。
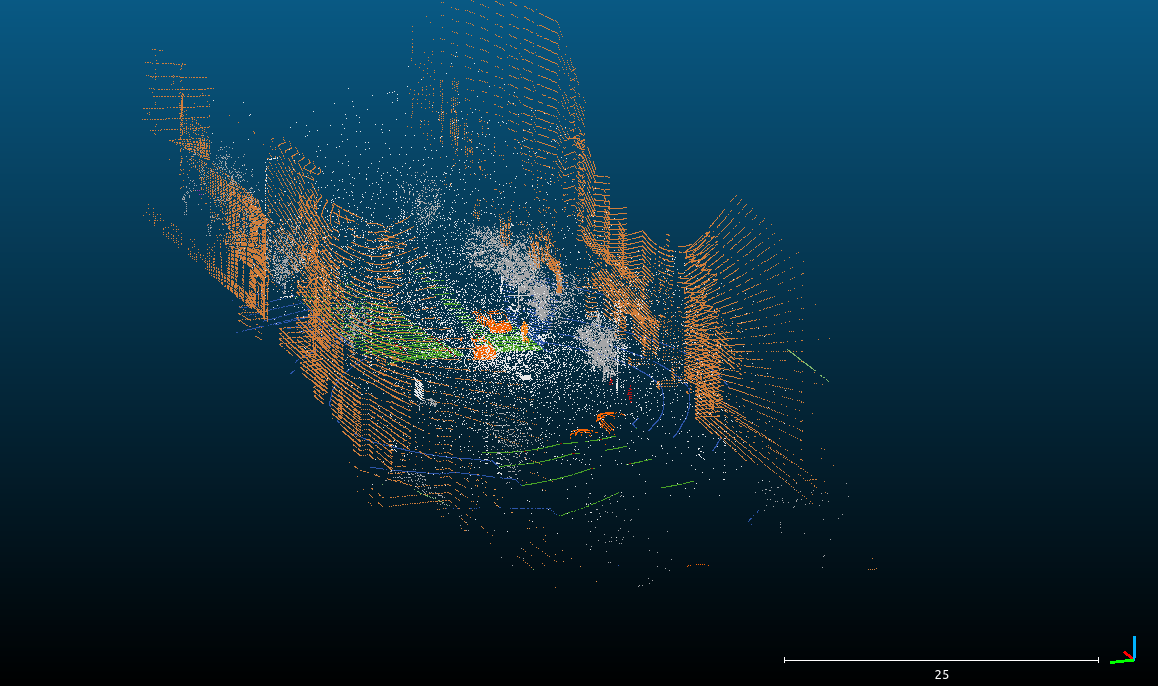 圖3:雪天aiSim5激光雷達(dá)點(diǎn)云(2L)圖2:晴天aiSim5激光雷達(dá)點(diǎn)云(2L)
圖3:雪天aiSim5激光雷達(dá)點(diǎn)云(2L)圖2:晴天aiSim5激光雷達(dá)點(diǎn)云(2L)二、與不同材料的相互作用
aiSim的基于物理的LiDAR模型還會(huì)和不同的材料具有相互作用,與Filament相似,能夠提供高度真實(shí)和準(zhǔn)確的光線與材質(zhì)交互模擬結(jié)果。
考慮到不同材料的反射率(反照率)不同,許多材料的反照率數(shù)據(jù)并不都是在905nm波長(zhǎng)下測(cè)量的,因此aiSim將反照率值基于pbrt-v3模型轉(zhuǎn)換成720nm的波長(zhǎng),接近于905nm。
對(duì)于安全交通標(biāo)識(shí)和和車道線等具有回歸反射(Retro-Reflective)特性的材料來說,能夠?qū)⑤椛淠芰拷^大部分直接反射回接收器。當(dāng)LiDAR的光束擊中這類表面時(shí),信號(hào)損失非常小。
因此,在aiSim的LiDAR傳感器輸出的點(diǎn)云強(qiáng)度中,強(qiáng)度值[0-100]之間為L(zhǎng)ambertian(朗伯)值,而[101-255]則代表回歸反射的目標(biāo)。如圖:當(dāng)值大于100時(shí),車道顯示為紅色。
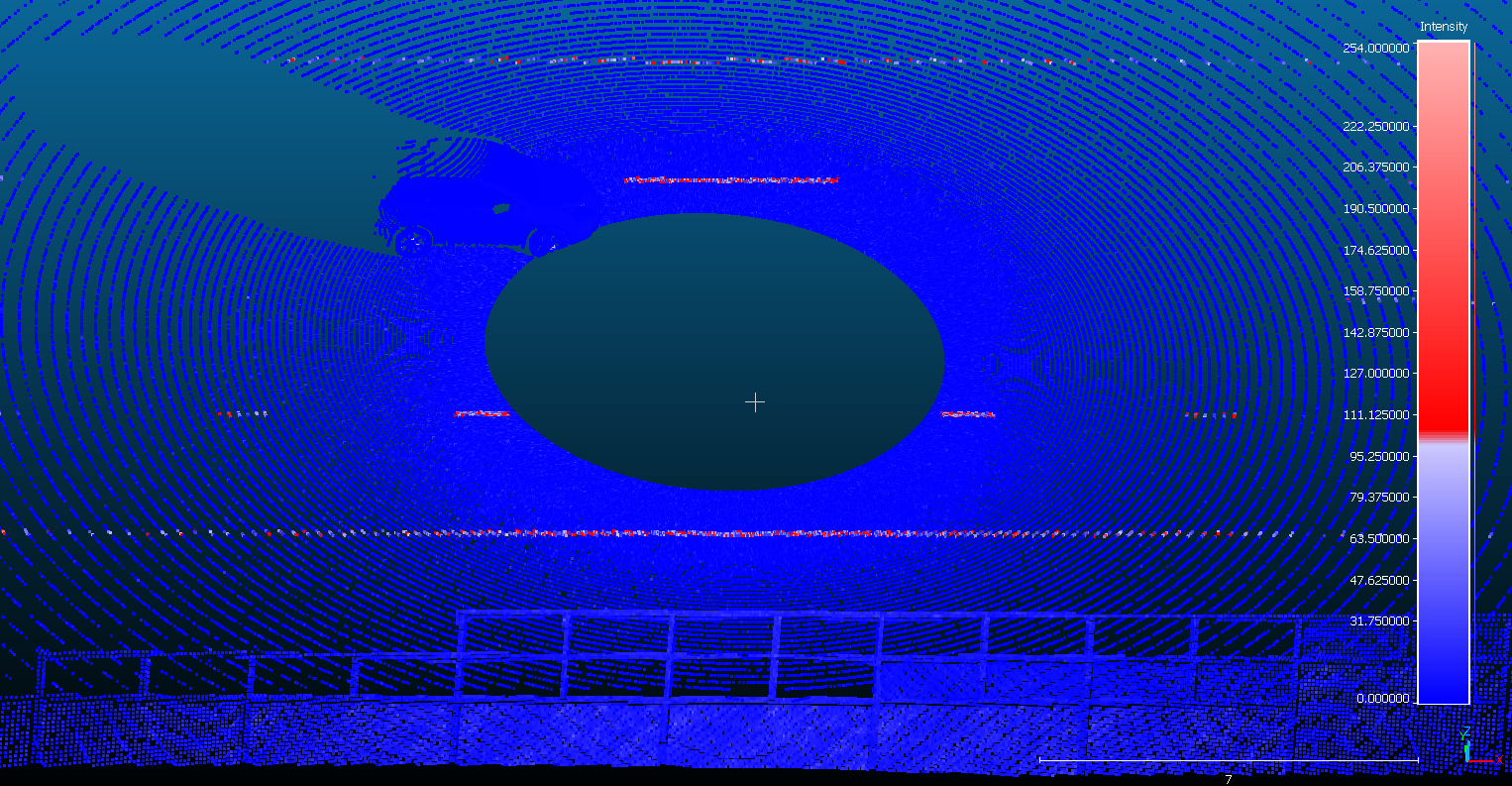 圖4:點(diǎn)云強(qiáng)度值
圖4:點(diǎn)云強(qiáng)度值同時(shí),aiSim也提供了豐富的材料庫,對(duì)于大多數(shù)3D數(shù)字資源來說,可以通過aiSim提供的回歸反射材料,將其附著在3D模型上來實(shí)現(xiàn)逆反射的效果。除逆反射外,aiSim也提供BRDF材料蒙版,即基于雙向反射分布函數(shù)的反射材料,讓不同的3D模型就有不同程度的回歸反射特性,在不同區(qū)域上實(shí)現(xiàn)實(shí)現(xiàn)不同的光學(xué)行為。
由于在大多數(shù)圖像處理系統(tǒng)中,紅色通道是最容易區(qū)分和處理的通道,因此aiSim在紅色通道表示回歸反射的特性,將[0-255]劃分成不同的部分來表示:
[0-15]:基礎(chǔ)反射,表示材料的基礎(chǔ)反射性,即漫反射特性,遵循朗伯特定律,適用于大多數(shù)普通表面,如墻壁等。
[16-32]:回歸反射,表示材料具有逆反射特性,允許光線沿著接近入射角度相反方向反射回去,適用于交通標(biāo)志,施工標(biāo)志,車道線等。
[32-64]:清漆(透明)層,表示材料物體的材質(zhì)將會(huì)模擬出光滑有光澤的表面,通常應(yīng)用于在汽車表面,塑料制品等具有透明保護(hù)層的3D模型。
三、實(shí)際應(yīng)用
在實(shí)際應(yīng)用中,通過場(chǎng)景重建可以比對(duì)驗(yàn)證aiSim中LiDAR模型的置信度:
1、高速公路場(chǎng)景點(diǎn)云
紅色點(diǎn)云為aiSim仿真場(chǎng)景中LiDAR輸出結(jié)果,綠色點(diǎn)云為真實(shí)世界中LiDAR點(diǎn)云數(shù)據(jù),仿真點(diǎn)云的總體形狀與真實(shí)數(shù)據(jù)非常接近。
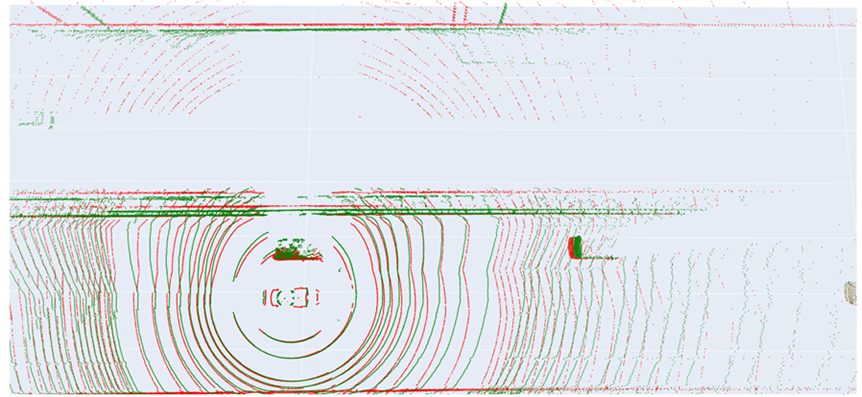 圖5:高速場(chǎng)景對(duì)比1
圖5:高速場(chǎng)景對(duì)比1 圖6:高速場(chǎng)景對(duì)比2
圖6:高速場(chǎng)景對(duì)比22、點(diǎn)云細(xì)節(jié)對(duì)比
- 在同一車道中,遠(yuǎn)距離外部車輛的點(diǎn)云數(shù)據(jù)與實(shí)際情況非常接近。
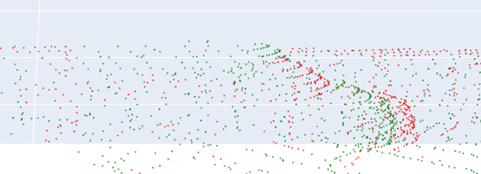 圖7:同車道遠(yuǎn)端車輛點(diǎn)云對(duì)比
圖7:同車道遠(yuǎn)端車輛點(diǎn)云對(duì)比當(dāng)然,在一些場(chǎng)景下,真實(shí)的激光雷達(dá)(綠色)激光束穿透玻璃表面的比例高于仿真(紅色)的結(jié)果。
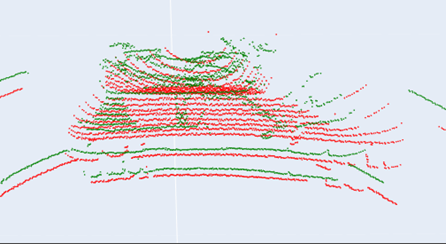 圖8:玻璃材質(zhì)穿透對(duì)比
圖8:玻璃材質(zhì)穿透對(duì)比以上就是驗(yàn)證aiSim激光雷達(dá)LiDAR模型的驗(yàn)證方法。
作者介紹
崔工
康謀科技仿真測(cè)試業(yè)務(wù)技術(shù)主管,擁有超過5年的汽車仿真測(cè)試及自動(dòng)駕駛技術(shù)研發(fā)經(jīng)驗(yàn),熟練掌握仿真測(cè)試工具和平臺(tái),如aiSim、HEEX等,能有效評(píng)估和優(yōu)化自動(dòng)駕駛系統(tǒng)的性能和安全性。擁有出色的跨文化溝通能力,成功帶領(lǐng)團(tuán)隊(duì)完成多項(xiàng)海外技術(shù)合作項(xiàng)目,加速了公司在自動(dòng)駕駛技術(shù)上的國(guó)際化進(jìn)程。作為技術(shù)團(tuán)隊(duì)的核心,領(lǐng)導(dǎo)并實(shí)施過大規(guī)模的自動(dòng)駕駛仿真測(cè)試項(xiàng)目,對(duì)于車輛行為建模、環(huán)境模擬以及故障診斷具有獨(dú)到見解。擅長(zhǎng)運(yùn)用大數(shù)據(jù)分析和人工智能技術(shù),優(yōu)化仿真測(cè)試流程,提高測(cè)試效率和結(jié)果的準(zhǔn)確性。
-
AD
+關(guān)注
關(guān)注
27文章
868瀏覽量
150328 -
adas
+關(guān)注
關(guān)注
309文章
2184瀏覽量
208650 -
激光雷達(dá)
+關(guān)注
關(guān)注
968文章
3972瀏覽量
189923 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
784文章
13812瀏覽量
166457
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
激光雷達(dá)的維護(hù)與故障排查技巧
如何提升激光雷達(dá)數(shù)據(jù)的精度
激光雷達(dá)技術(shù)的發(fā)展趨勢(shì)
LIDAR激光雷達(dá)逆向建模能用到revit當(dāng)中嗎
光學(xué)雷達(dá)和激光雷達(dá)的區(qū)別是什么
lidar激光雷達(dá)掃描儀有什么用
激光雷達(dá)與毫米波雷達(dá)的優(yōu)缺點(diǎn)是什么
康謀分享|aiSim5基于生成式AI擴(kuò)大仿真測(cè)試范圍(終)

康謀分享 | aiSim5仿真場(chǎng)景重建感知置信度評(píng)估(三)

康謀分享 | aiSim5 物理相機(jī)傳感器模型驗(yàn)證方法(一)

LiDAR4D:基于時(shí)空新穎的LiDAR視角合成框架
Phlux推出一種新型傳感器以進(jìn)軍汽車激光雷達(dá)(LiDAR)市場(chǎng)
華為詳細(xì)解讀激光雷達(dá)
激光雷達(dá)LIDAR基本工作原理

康謀產(chǎn)品 | 為ADAS/AD開創(chuàng)的次世代AutoGI仿真工具





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論