") 迎來“CASE”時代的汽車趨勢和技術課題(3) ~自動駕駛和識別引擎~
迎來“CASE”時代的汽車趨勢和技術課題(3) ~自動駕駛和識別引擎~
本次作為迎來“CASE”時代的汽車趨勢和技術課題的第三次,我們將介紹面向實際應用和實證實驗突飛猛進的自動駕駛和掌控自動駕駛“認知”的識別引擎概要。
開發(fā)和實證實驗取得進展的自動駕駛功能
自動駕駛功能愈來愈得到了實際應用。2021年7月舉辦的東京奧運會和殘奧會具有里程碑意義。除了已決定在選手村內的移動(循環(huán)線路)中引入自動駕駛車輛(4級)外,在羽田機場周圍和沿海副中心區(qū)域計劃進行各種與自動駕駛相關的實證實驗。
自動駕駛分為幾個級別,目前廣泛使用美國汽車工程師協會(SAE)作為“SAE J3016”規(guī)定的6級(表1)。(在日本,政府發(fā)布的“官民ITS構想和路標圖2019”中總結了相同的定義)
檢測前方障礙物予以輔助制動等所謂的ADAS(先進駕駛輔助系統),一般屬于1級。此外,自適應巡航控制和自動車道保持的同步操作等2級功能也已得到實際應用。雖然已經出現配備3級功能的市售車,但由于法律完善的問題,這種車輛尚未在日本國內銷售。
| 駕駛員的作用 | 功能 | 功能示例 | |
|---|---|---|---|
| SAE級 0 | 駕駛員始終進行駕駛操作,但當輔助功能工作時,則可以將腳從踏板上挪開,或將手從方向盤上松開。 | 僅進行警示和臨時輔助。 | 自動緊急制動、盲點警示、車道偏離警示等 |
| SAE級 1 | 加減速或轉向輔助 | 車道保持或自適應巡航控制 | |
| SAE級 2 | 加減速和轉向輔助 | 車道保持與自適應巡航控制的同步操作 | |
| SAE級 3 | 無需駕駛員進行介入(唯獨3級在系統要求時進行介入)。 | 限定條件下的自動駕駛,在沒有滿足所有條件的狀態(tài)下不能工作 | 交通堵塞時的自動跟隨行駛等 |
| SAE級 4 | 特定區(qū)域內的無人駕駛出租車等 | ||
| SAE級 5 | 所有條件下的自動駕駛 | 不分區(qū)域的無人駕駛出租車等 |
傳感器的主角是攝像頭、雷達和LiDAR(激光雷達)
ADAS和自動駕駛主要通過(A)認知、(B)判斷、(C)操作這三個功能來實現(駕駛員進行駕駛也相同)。
其中,(A)識別是由傳感器和識別引擎(識別處理器)進行的,除了對車輛前方的行人、自行車、迎面車、停放車輛、障礙物、車道、標志、交通燈等進行識別外,還對在車后和車側行駛的超越車輛、相鄰車道上的并行車輛等進行適當識別,并將該信息提供給后續(xù)的判斷功能。
作為傳感器,使用攝像頭、雷達、LiDAR等。
攝像頭
攝像頭包括單眼攝像頭、根據視差獲取深度信息的立體攝像頭(雙眼)、將立體攝像頭與不同焦距的單眼攝像頭組合而成的三眼攝像頭。按大致記載的順序感測精度提高,但成本也會隨之上升。
即使使用單眼攝像頭,如果自身的車輛在移動,也可以根據某一幀及其后續(xù)幀的視差來弄清至行人或物體的距離。因此,低成本的單眼攝像頭現在仍被廣泛使用。
圖1 借助攝像頭拍攝到的障礙物檢測圖像
雷達(RADAR : RAdio Detection And Ranging)
LiDAR是一項輻射毫米波或微波,根據其反射來感測周圍的人、物體的距離和位置的技術。幾年前,人們曾預測24GHz雷達將成為主流,但由于受電波頻段分配的制約,頻段窄至200MHz,所以人們將重點放在了可以使用4GHz左右的頻段也可以實現天線模塊小型化的77GHz頻段上。最近,還出現了使用低成本CMOS工藝的解決方案,毫無疑問,它將成為未來的主流。
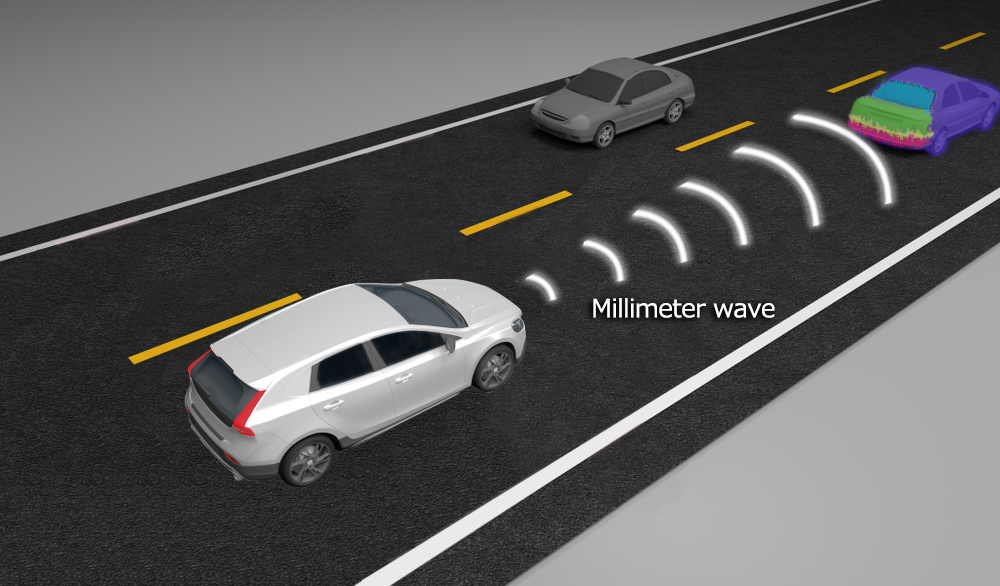
圖2 借助雷達拍攝到的障礙物檢測圖像
LiDAR (Light Detection and Ranging 或 Laser Imaging Detection and Ranging)
LiDAR是一種使用紅外激光取代電波的雷達。雖然它由于波長比電波短,能夠獲得高分辨率,但它也面臨著易受雨和霧等氣象條件影響的課題。
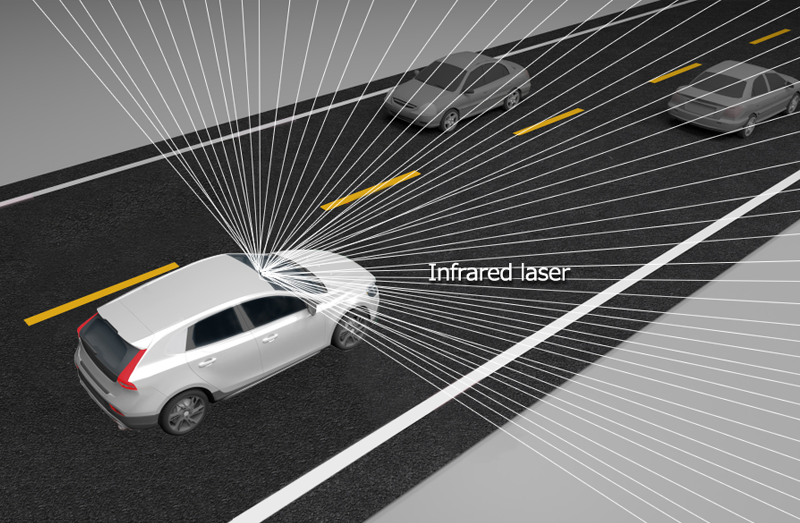
圖3 借助LiDAR拍攝到的障礙物檢測圖像
由于各自的感測方式都有其優(yōu)缺點 (表2),因而也采用將兩種以上的技術融合(fusion) 起來的“傳感器融合”方式。譬如,據說一輛擁有超過2級的先進功能的豪華車,在車前、車側和車后總共配備了8個攝像頭和5個雷達。
| 攝像頭 | 雷達 | LiDAR | |
|---|---|---|---|
| 分辨率 | 〇 | △ | 〇 |
| 距離分辨率 | △ | 〇 | 〇 |
| 惡劣天氣 | △ | 〇 | △ |
| 夜間 | △ | 〇 | 〇 |
| 其他 | 由于圖像可由人來確認,易于評估,成本低 | 77GHz頻段成為主流 | 截至到現在成本依然很高 |
由圖像處理加速器和推斷器構成的識別引擎
識別引擎或圖像識別處理器根據來自攝像頭等傳感器的信息(圖像信息)識別前方和周圍狀況。雖然已出現專用的ASSP和SoC,但也可使用通用的FPGA和GPU。特別是可以重寫內部邏輯電路的FPGA,適合于在試制中進行算法驗證。
識別引擎由以高性能處理器內核為中心的各種圖像處理加速器構成(圖4)。譬如,包括進行圖像旋轉、放大或縮小的仿射變換加速器,白線識別所需的邊緣檢測加速器,獲取圖像亮度分布的直方圖加速器等。
為確保安全,識別處理必須在系統規(guī)定的時間內完成,且必須將該識別結果傳遞給后續(xù)的判斷系統。因此,各自的處理是并行執(zhí)行的,而不是依序執(zhí)行的。
連接到識別引擎的內存系統的性能也很重要,通常使用DDR2或DDR4等高速內存。
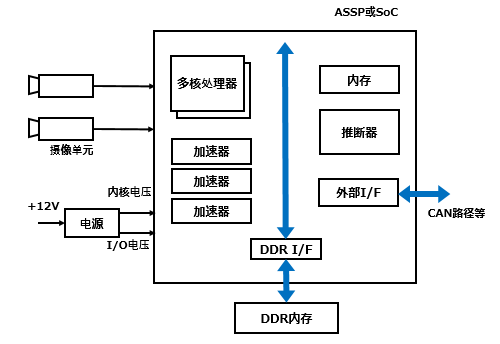
圖4.識別引擎的概略方框圖
此外,近年來也安裝了深度學習(deep learning)的推斷器。目的是通過與傳統的匹配手法相結合來提高識別精度。
在不同的國家或地區(qū)、氣象條件、道路狀況下,將車輛行駛時收集到的大量攝像圖像和雷達圖像提供給高性能的深度學習系統(云等)以構建神經網絡模型,并作為推斷器安裝到識別引擎上。但是,由于高精確的推斷器需要大量的電路邏輯,關鍵是如何實現輕量化,包括減少位數和裁剪 (pruning) 等措施。
保證在高溫下運行,抑制發(fā)熱是關鍵
在安裝由攝像單元、識別引擎等構成的系統(ECU:電子控制單元)時應予注意的是溫度。因高速處理大量數據而導致功率增大,零部件發(fā)熱使得整個ECU(電子控制單元)趨于高溫化。此外,該ECU一般安裝在靠近室內后視鏡的背面,用于前方監(jiān)控。特別是在炎熱的夏天,車輛內部會成為高溫,ECU即使從該狀態(tài)啟動也必須正常工作。
需要選定溫度特性優(yōu)異、且在“電源電路的基礎知識(4)”中介紹的AEC (Automotive Electronics Council) 定義的0級和1級等工作溫度范圍廣的零部件。
為了抑制溫度升高,降低ECU本身的功耗也很重要。如果想提高識別引擎的性能,相應地還需要更多的邏輯,功耗也會增大,所以需要選定一個均衡的解決方案。此外,在選定用于外圍電路的無源零部件、攝像頭(圖像傳感器)和DDR內存時,還必須考慮功耗。
(2) 低電壓/大電流電源電路不可或缺
還需要注意電源。隨著識別引擎過程節(jié)點的微細化,內核電壓已經降至1.0V左右。假設功耗為10W,則需要準備輸出為1.0V/10A的電源電路。如果額定電壓降低,則允許電壓范圍也會變窄,因此需要一個沒有變動的穩(wěn)定的電源電路。
還需要注意安裝表面的電磁干擾。如果干擾疊加在攝像圖像或雷達圖像上,可能會導致識別錯誤。需要適當選擇開關電源(DC/DC轉換器)的開關頻率,并設法使得電流隨著開關操作切換的回路(熱回路)面積最小化。此外,在安裝包括圖像傳感器在內的傳感器輸出的配線和模擬前端時,還需要使它們不易受外部噪波的影響。
另外,駕駛員負責駕駛至2級,但3級以上則由系統控制駕駛,因此,為了即使在電路和電源等發(fā)生故障(缺陷)的情況下也能保持安全性,必須進行諸如使電力系統冗余化(雙重化)等方面的應對。
深度學習的進一步活用將促進自動駕駛
雖然需要解決法律完善和社會共識的問題,但毫無疑問,3級或4級等自動駕駛功能在不久的將來將被投入實際應用。為了實現這個目標,除了進一步提升模式匹配等傳統技術外,深度學習肯定將是關鍵技術之一。找元器件現貨上唯樣商城
另一方面,從電子產品的角度來看,兼顧識別引擎和感測系統的高性能化和低功耗化則將成為一個課題。如果提高性能,通常會導致功耗增加,發(fā)熱增大,電池的消耗也會加快。如何使性能和功率取得平衡似乎是未來的關鍵。
迎來“CASE”時代的汽車趨勢和技術課題(3)~自動駕駛和識別引擎~ - 松下電器機電(中國)有限公司 官方網站 (panasonic.cn)
Related product information
6軸車載慣性傳感器(6in1傳感器)
審核編輯 黃宇
-
雷達
+關注
關注
50文章
2936瀏覽量
117532 -
ecu
+關注
關注
14文章
886瀏覽量
54504 -
adas
+關注
關注
309文章
2184瀏覽量
208650 -
Case
+關注
關注
0文章
27瀏覽量
13367 -
自動駕駛
+關注
關注
784文章
13812瀏覽量
166457
發(fā)布評論請先 登錄
相關推薦





 工商網監(jiān)
工商網監(jiān)
評論