") 基于PSpice System Option接口的直流電機控制系統(tǒng)設計
基于PSpice System Option接口的直流電機控制系統(tǒng)設計
概述
基于仿真速度和結(jié)果精度之間的權衡,在設計的第一階段使用高精度模型不是一種有效的方法。高精度模型會使仿真速度變的非常慢,建議在設計過程中的每個階段使用合適的模型。可能會發(fā)現(xiàn),合適的模型會更容易優(yōu)化系統(tǒng)參數(shù)。
本文將用實例的方式演示以分段建模的方式優(yōu)化直流電機控制系統(tǒng)。
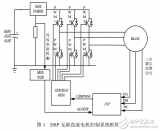
下面是直流電機控制系統(tǒng)的示意圖:
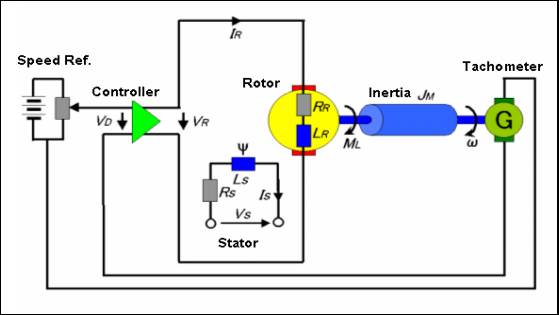
圖1 直流電機控制系統(tǒng)
該圖由定子或勵磁繞組組成,該繞組產(chǎn)生恒定的勵磁磁通量。該繞組由電感Ls和電阻Rs建模。當電壓Vs施加到定子繞組時,電流is流動,產(chǎn)生磁通Ψ。轉(zhuǎn)子繞組也通過其電感LR和電阻RR來建模。當電壓VR施加到轉(zhuǎn)子繞組時,電流IR流動。VR是由差分輸入電壓VD驅(qū)動的控制器的輸出。信號流是從VD到VR,但不是在相反的方向上。因此,轉(zhuǎn)子和定子之間的電樞反作用被忽略。
定子
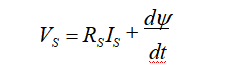
首先,我們寫出定子繞組的數(shù)學方程式:
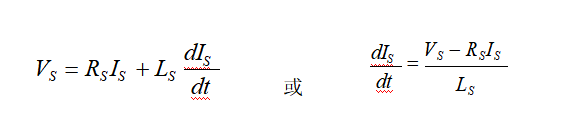
通常,磁通量Ψ是定子電流Is的非線性函數(shù)。為了簡單起見,我們假設Ψ是Is的線性函數(shù):
y=LSIS
因此我們可以得到:
轉(zhuǎn)子
對于轉(zhuǎn)子繞組的數(shù)學方程,我們得到

VI是當轉(zhuǎn)子繞組在勵磁場中旋轉(zhuǎn)時在轉(zhuǎn)子繞組中感應的相反的電動勢。VI可以寫成常數(shù)C1、通量Ψ和角速度ω的乘積。
V1=C1yw
機械動力學
對于轉(zhuǎn)子軸上的力矩,我們可以寫出平衡方程:
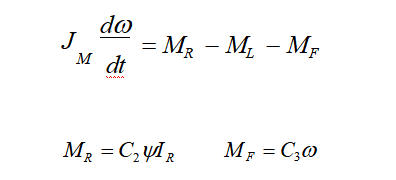
MR是轉(zhuǎn)子驅(qū)動轉(zhuǎn)矩,它是勵磁磁通Ψ和轉(zhuǎn)子電流IR乘以常數(shù)C2的線性函數(shù)。ML是給定的負載力矩,MF是電機的內(nèi)摩擦力矩,假設它是角速度ω乘以常數(shù)C3的線性函數(shù)。JM是與轉(zhuǎn)子機械連接的所有旋轉(zhuǎn)質(zhì)量的慣性矩。控制器
控制器由設置的標稱角速度ωS的速度電位器電壓和與角速度ω成正比的轉(zhuǎn)速表電壓之間的電壓差VD驅(qū)動。我們可以將VD寫成角速度之差乘以常數(shù)C4:
VD=C4(ωS-ω)
對于控制器,我們使用PI特性,其描述如下:
Simulink 模型
首先,我們在Simulink中對整個系統(tǒng)進行建模。
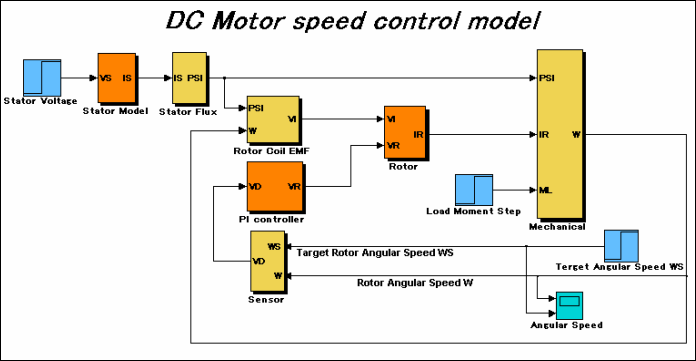
圖2 Simulink模型
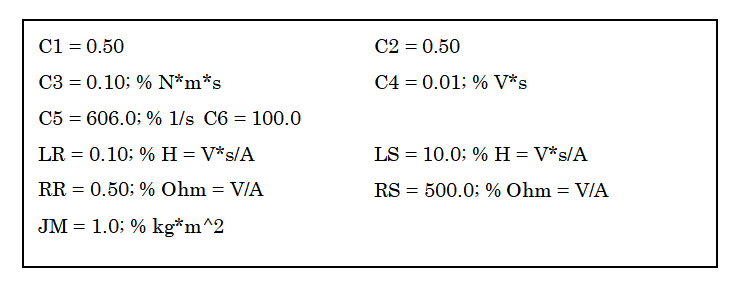
參數(shù)
Simulink 模型結(jié)果
角速度ωS(t)和ω(t)的曲線如下所示。定子電壓VS在時間t=1s處被接通。ωS在2s時設置為50 rad/S,轉(zhuǎn)子開始轉(zhuǎn)動。在t=6s左右,ω達到50 rad/s的穩(wěn)態(tài)。
在t=7s時,施加50 Nm的負載力矩,轉(zhuǎn)子速度降至43.6 rad/s。因此,控制器增加VR,在t=10s左右再次達到ωs=50 rad/s的新穩(wěn)態(tài)。
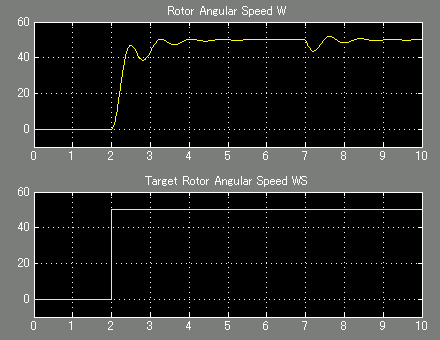
圖3.Angularvelocitiesω(t)andωS(t)
Simulink-PSpice 模型(理想運放)
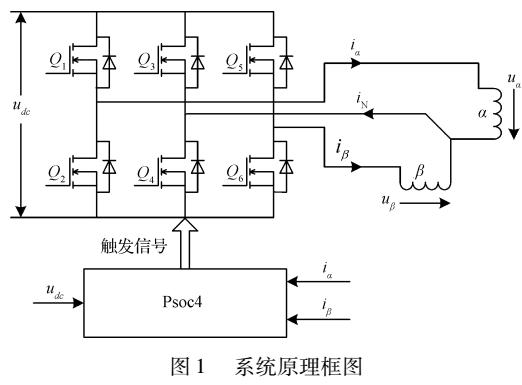
參考Simulink模型的仿真結(jié)果,我們現(xiàn)在將把一些Simulink塊替換為PSpice電路。下面是系統(tǒng)框圖
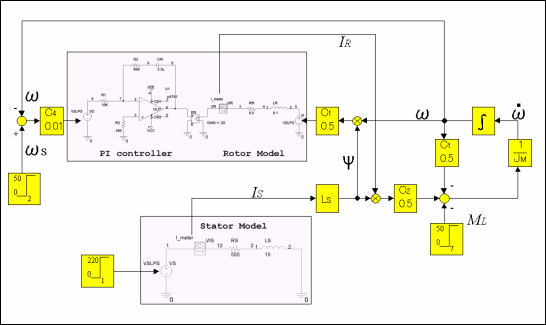
圖4.系統(tǒng)框圖
Simulink 模型(理想運放)
下面是Simulink模型,其中包括使用SLPS的PSpice電路。
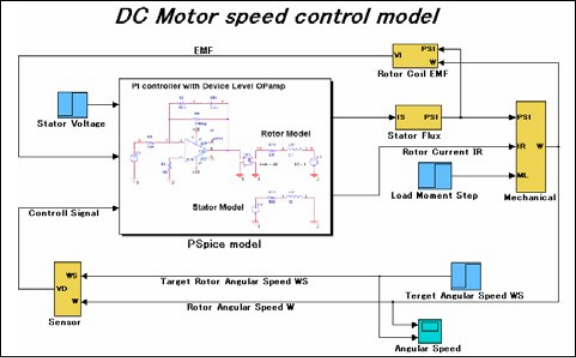
圖5.Simulink模型
PSpice 電路(理想運放)
定子、轉(zhuǎn)子和PI控制器采用PSpice建模,如下所示。
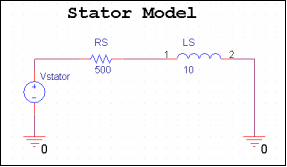
圖6.定子電路
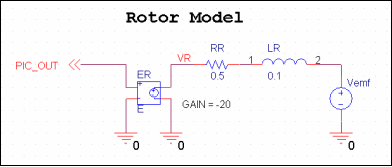
圖7.轉(zhuǎn)子電路
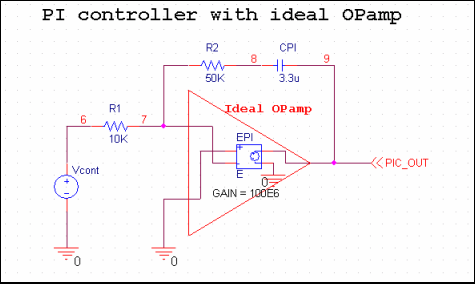
圖8.PI控制電路
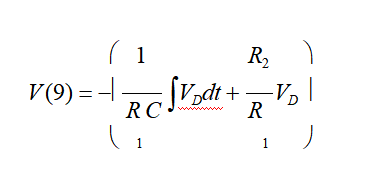
電路元件VS、RS、LS和ER、RR、LR實現(xiàn)dIs/dt和dIR/dt的等式。對于PI控制器中的運算放大器,我們首先使用一個理想的模型,該模型具有很高的開環(huán)增益、無限輸入電阻、零輸出電阻、零輸入偏置電壓、零輸入偏移和偏置電流,并且沒有輸出電壓飽和。這種行為很容易在PSPICE中通過線性電壓控制電壓源進行建模。PI控制器輸出電壓V(9)(PIC_OUT)由以下等式給出。
有了這些因素

I和P特性相交的角頻率f0為:

電壓V(9)控制增益值為-20的電壓控制電壓源ER。因此,我們得到

將此方程與Simulink模型中的VR方程進行比較,我們注意到兩者是相同的,因為常數(shù)C5=606和C6=100。因此,PSpice控制器電路在Simulink模型中實現(xiàn)了與子系統(tǒng)PI控制器相同的VR方程。
Simulink-PSpice模型仿真結(jié)果
仿真結(jié)果如下:
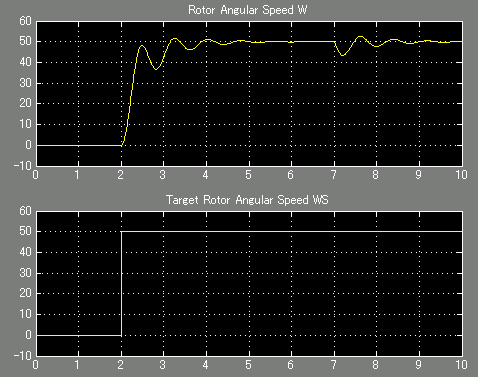
圖9 理想放大下的PI控制器的ω(t)和ωS(t)f
Simulink-PSpice 模型(實際運放)
PSpice電路(實際運放)
我們現(xiàn)在用標準μA741 OPamp的設備級模型取代PI控制器中的理想OPamp模型。
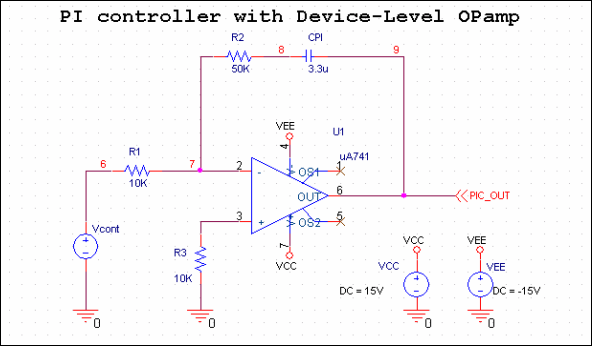
圖10.使用μA741的PI控制器電路
Simulink-PSpice 仿真結(jié)果(實際運放)
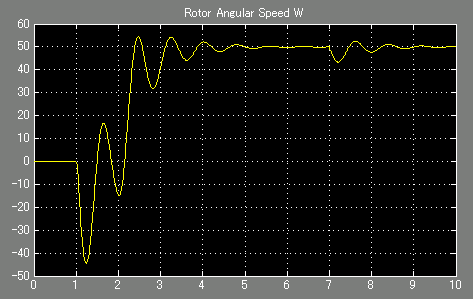
圖11.使用μA741的PI控制器的ωS(t)
在1s點開啟激勵后,電機開始反向轉(zhuǎn)動。顯然,設備級模型的行為與控制器中使用的理想運放模型不同。這是因為在t=0直流工作點計算時,由于輸入失調(diào)電壓和非常高的開環(huán)增益,運放輸出進入飽和狀態(tài)。
PSpice電路(直流反饋)為了避免偏移問題,在反饋回路中加入了10MΩ電阻器R4,將直流增益限制在1000。
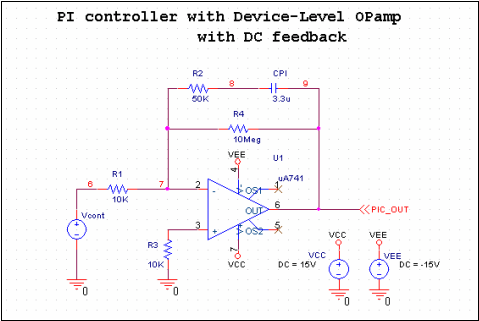
圖12.帶直流反饋的PI控制電路
Simulink-PSpice 仿真結(jié)果(直流反饋)
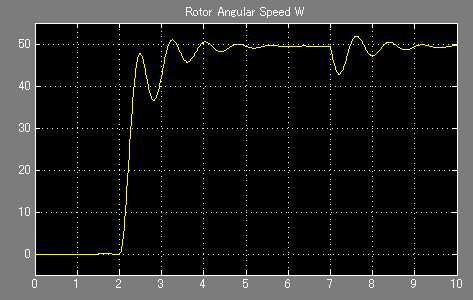
圖13.ωS(t)(R4=10MΩ)
由于運放輸出偏置電壓降低,相反方向的初始瞬態(tài)也降低。直流增益降低的負面影響是ω(t)的穩(wěn)態(tài)響應與50 rad/s略有不同。
通過在設計過程的每個階段選擇不同的模型,您可以快速查找并解決問題。首先用理想模型建模,就可以確定近似參數(shù)。然后,您可以將這些理想模型替換為線性電子元件,然后再替換為非線性器件,以進行最終電路驗證。在Simulink中使用PSpice (SLPS)可以減少設計修改的次數(shù),并使您的設計周期更短。
總結(jié)
PSpice System Option軟件模塊將cadence仿真技術和MathWork 的Simulink-MATLAB仿真包整合在一起形成一個強大的聯(lián)合仿真環(huán)境。
Simulink是一個多領域仿真和基于模型的動態(tài)系統(tǒng)仿真平臺,與PSpice軟件緊密集成,這允許設計人員執(zhí)行系統(tǒng)級仿真,其中包括物理器件的實際電氣模型,在早期的設計過程中也可以發(fā)現(xiàn)設計和集成問題,減少原型設計的迭代次數(shù)。集成還能夠使機電系統(tǒng)的設計人員(如控制塊,傳感器和功率轉(zhuǎn)換器)能夠?qū)崿F(xiàn)集成系統(tǒng)和電路仿真。
-
電機控制
+關注
關注
3534文章
1879瀏覽量
268800 -
直流電機
+關注
關注
36文章
1710瀏覽量
70183 -
模型
+關注
關注
1文章
3243瀏覽量
48836
發(fā)布評論請先 登錄
相關推薦
智能小車的直流電機控制
基于TL494的直流電機控制系統(tǒng)設計
兩相無刷直流電機矢量控制系統(tǒng)
基于SENT協(xié)議的有刷直流電機控制系統(tǒng)設計

基于單片機的直流電機控制系統(tǒng)設計





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論