 基于鴻道(Intewell?)操作系統研發的農業機器人操作系統
基于鴻道(Intewell?)操作系統研發的農業機器人操作系統
推動農業科技發展、強化農機裝備自主研制和高端智能農機裝備研發制造既是黨和政府關注的重點,也是實現鄉村全面振興、加快建設農業強國的內在要求和迫切需要。
江蘇大學與科東軟件聯合研發“農業機器人操作系統”,并成立“農業機器人操作系統”聯合實驗室,奮力推進我國農業智能化,推動農業科技創新。“農業機器人操作系統”的技術革新,對提高農業生產效率、保護環境、應對農業勞動力短缺及促進智慧農業發展等方面都有著重要的戰略意義。
農業機器人操作系統
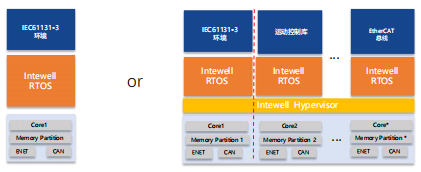
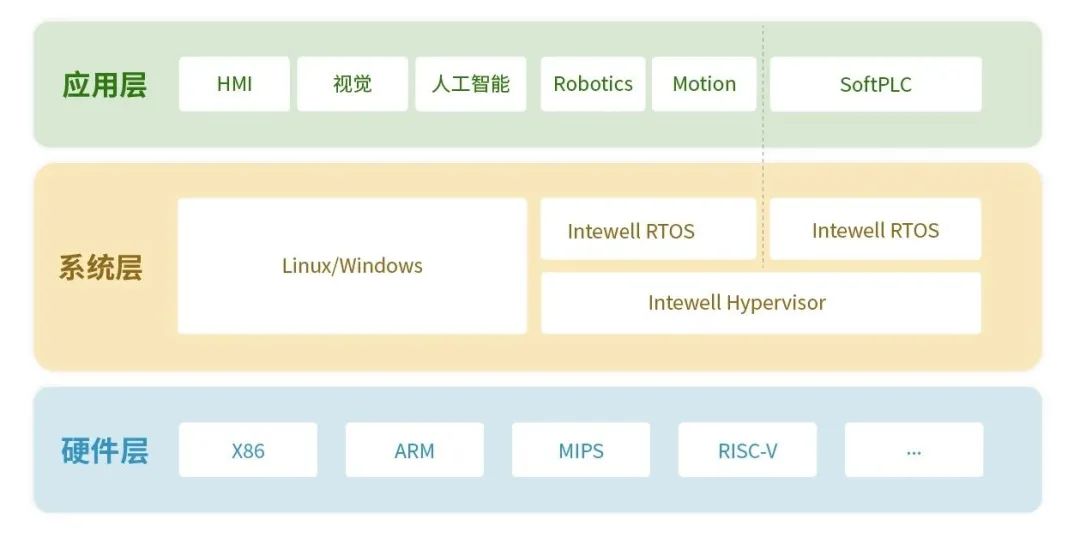
農業機器人控制操作系統是一個復雜的集成系統,涉及多個關鍵技術和組件,旨在實現農業生產的自動化和智能化。
核心亮點
自主可控:
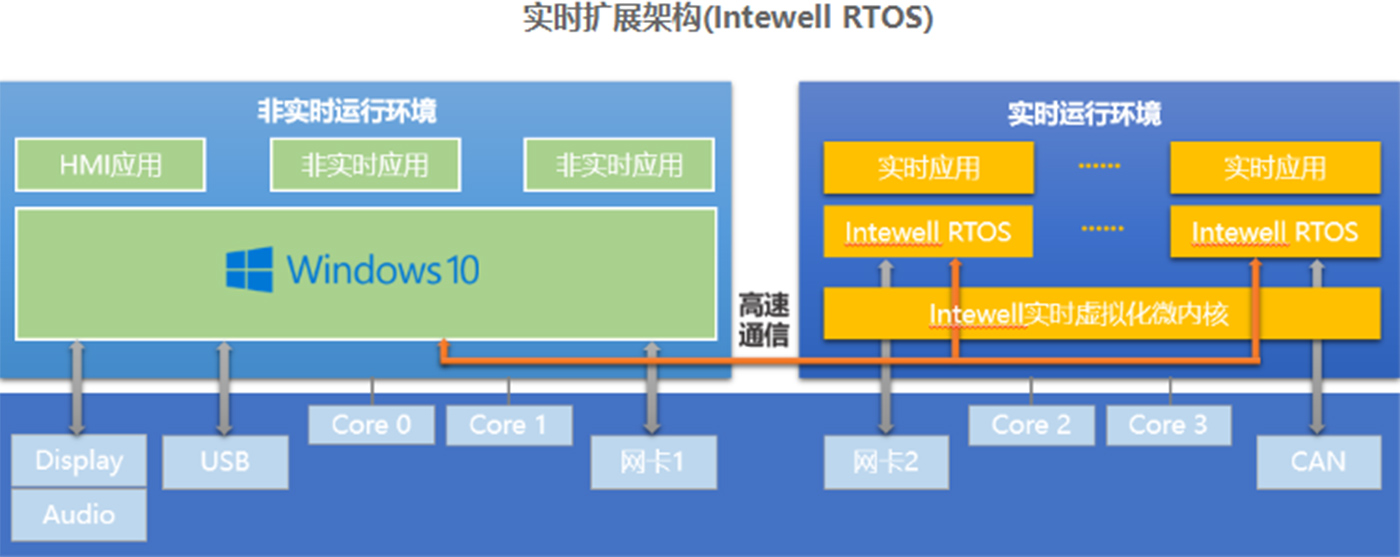
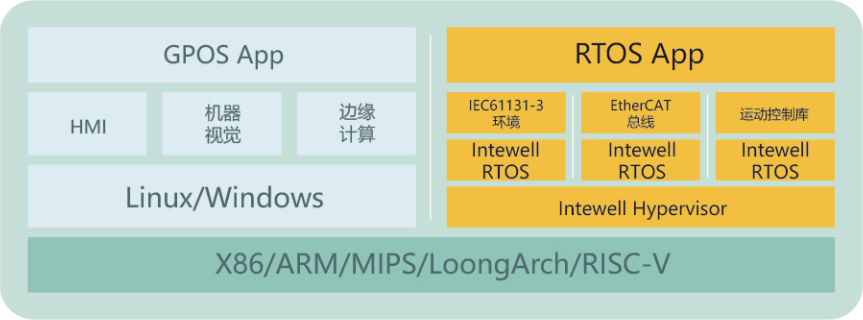
基于鴻道(Intewel?)操作系統研發的農業機器人操作系統,真正實現自主可控,避免卡脖子問題,同時具備高安全性和穩走性。
運動控制技術:
農業機器人的運動控制是實現其自主運動和執行任務的關鍵。通過精確的運動控制,機器人可以準確地到達指定位置并執行相應的農業操作。
決策與控制算法:
基于感知到的環境信息和預設的任務要求,農業機器人需要利用決策與控制算法來自主規劃行動路徑和執行操作。這些算法涉及機器學習、人工智能等技術,以提高機器人的決策能力和作業效率。
人機交互界面:
為了方便用戶對農業機器人進行監控和管理,我們可以通過人機交互界面,查看機器人的實時狀態、作業進度等信息,并可以對機器人進行遠程控制和調整。
感知技術:
農業機器人通過各種傳感器獲取農田環境信息,如土壤濕度、溫度、光照強度以及作物生長狀況等。這些傳感器安裝在機器人的不同部位,通過采集環境信息并利用算法進行分析和處理,使機器人能夠更好地適應不同的農業環境。
審核編輯 黃宇
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
211文章
28418瀏覽量
207095 -
操作系統
+關注
關注
37文章
6825瀏覽量
123331
發布評論請先 登錄
相關推薦
鴻道Intewell-C純實時構型,適合有功能安全認證需求的工業操作系統
鴻道Intewell-C是一款工業實時微內核操作系統,由科東軟件自主研發,具有超低延遲和最小抖動,保障工業設備可以高效處理時間敏感的現場業務
鴻道Intewell操作系統:引領工業創新的軟硬件方案
針對不同的行業應用,鴻道(Intewell)操作系統平臺提供全實時、實時與非實時混合等構型,滿足不同行業的需求,形成可復制推廣的解決方案。鴻

低空經濟的第一助推力,基于鴻道Intewell操作系統的無人機控制系統
鴻道Intewell操作系統在無人機控制系統中發揮了關鍵作用。其高效的實時性和可靠性使得無人機在復雜環境下能夠穩定運行。同時,該
鴻道(Intewell)操作系統應用于工業機器人項目案例分享
和鴻道(Intewell)虛擬化混合架構的優勢,實現了工業機器人與PLC控制功能的集成,不僅提升了工業機器人產品的競爭力,還提高了
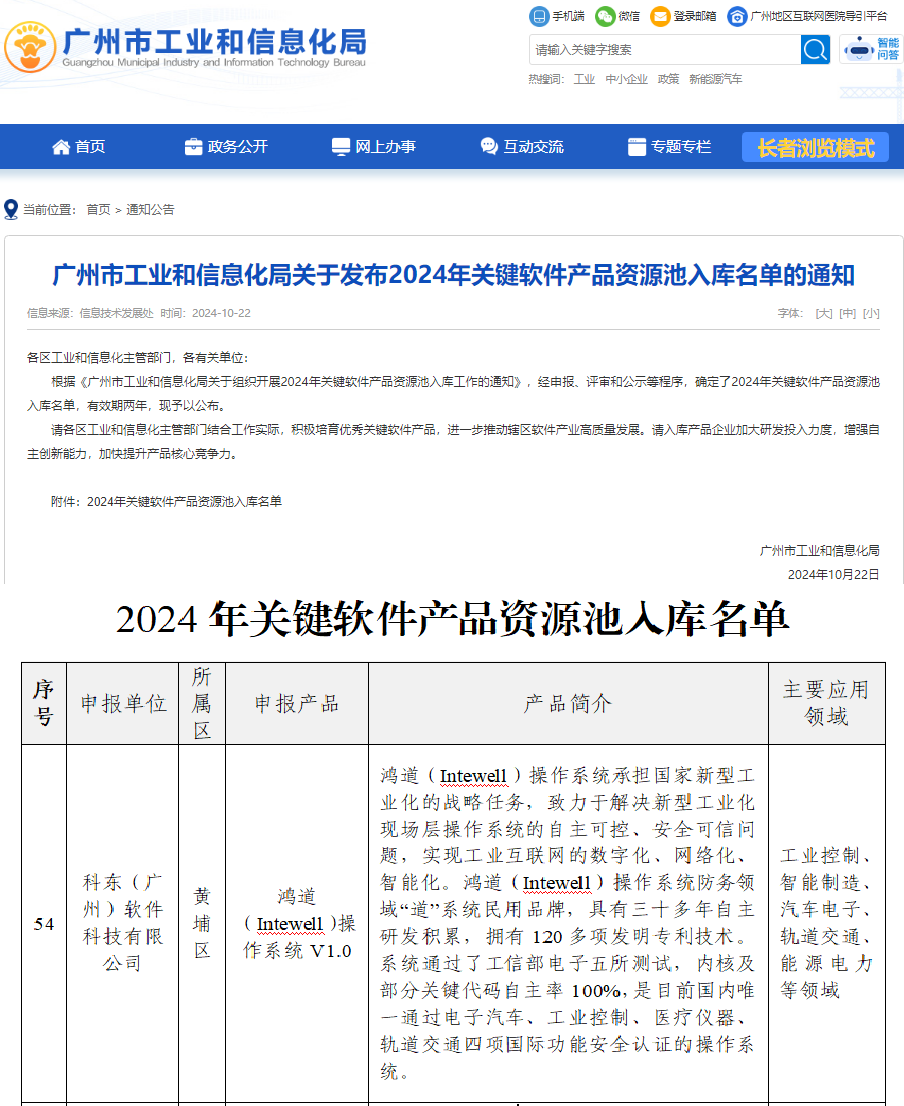
實力認證:鴻道(Intewell)操作系統入庫2024年廣州市工信局關鍵軟件產品資源池
科東軟件憑借鴻道(Intewell)操作系統成功入庫廣州市2024年關鍵軟件產品資源池,這一榮譽不僅是對鴻
國產力量崛起!鴻道Intewell操作系統推動我國制造業不斷升級
“將A處所有不同形狀不同顏色的小方塊移動到B處,并整齊堆疊。”在鴻道Intewell操作系統展區,記者看到,工作人員對著眼前一臺機械臂模樣的工業機器
基于鴻道Intewell操作系統的運動控制系統方案
鴻道Intewell工業實時操作系統運動控制解決方案,采用業界獨有的虛擬化技術,融合了實時與非實時業務的應用,滿足高集成、高性能實時運動控制的需求。在實時
鴻道Intewell操作系統X86生態之:Intel J1900
在當今數字化轉型的浪潮中,工業自動化和智能制造的需求日益增長,對實時操作系統的性能和可靠性提出了更高的要求。鴻道Intewell操作系統正是
嵌入式實時操作系統:Intewell操作系統與VxWorks操作系統有啥區別
Intewell操作系統和VxWorks操作系統都是工業領域常用的操作系統,它們各有特點和優勢。以下是它們之間的一些主要區別:

工業實時操作系統對比:鴻道Intewell跟rt-linux有啥區別
Intewell和RT-Linux是兩種不同的實時操作系統(RTOS),它們具有各自獨特的特點和優勢。以下是Intewell操作系統的一些關鍵特性,以及與RT-Linux的比較:

ARM架構:鴻道Intewell操作系統芯生態之·瑞芯微RK3399
通過瑞芯微RK3399芯片與鴻道Intewell操作系統的結合,可以構建出高性能、靈活多樣的嵌入式系統解決方案,滿足各類復雜應用的需求。





 工商網監
工商網監
評論