 外國牛人DIY超聲波傳感器檢測避障機器人(圖文)
外國牛人DIY超聲波傳感器檢測避障機器人(圖文)
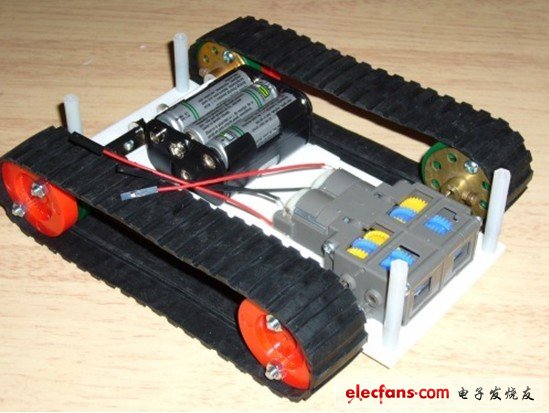
電子發燒友網訊:這是我做的第一個機器人,我會詳細記錄下每個程序,以方便那些初學者借鑒,準確說來我做的是一個履帶式的,由picaxe28x1控制,超聲波傳感器檢測的障礙物躲避機器人。
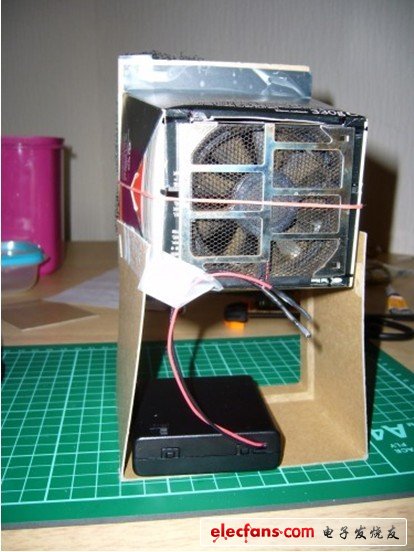
首先我焊接了一個排煙裝置。這個風扇我是從一個報廢的筆記本上拆下來的,我把它通過一個盒子將其連接到一個碳纖維金魚缸過濾器上,之后接上電池盒。
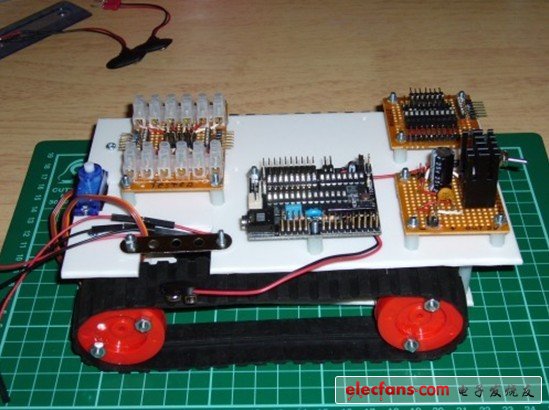
因為我是用F/F跳線連接模塊的,因此我需要焊接出相關的針腳,我會在picaxe上面額外添加一些插針,需要注意的是要注意針腳焊接的準確位置和角度。

因為HC-SR04超聲波傳感器明確的額定電壓是5V,而picaxe28X1也是在5V的電壓下工作狀態才是最佳的,同時我們用到的電機L294D的需要,因此我還做了一個5V的電壓調節器去保證超聲波傳感器免受電壓波動影響。這樣就可以保證我們機器人模組能工作在一個很穩定的電壓狀況下。具體做法就是我用一個工作電流1A的,5V固定電壓調節器,并將其連接到6個AA電池去提供一個7.2V輸入,5V輸出的電壓。

因為需要我搞了一個線轉針的轉換器。最初我想用切掉的線芯把焊點連接起來,但這樣很容易造成兩點之間的流錫。根據我失敗的經驗可以提醒各位,在做的時候最好是用到實心線。然后我用萬用表去確認我的連接都是沒問題的,當然,用電池和LED也可以完成同樣的工作。
同時我還想要做一個可以允許電線暫時轉換成pin接口的模組,其他的線和單獨模擬板類型的元器件可以插入,也可以把萬用表通過利用短塊和F/F跳線的方式插入插槽。以下就是我做的轉換器。
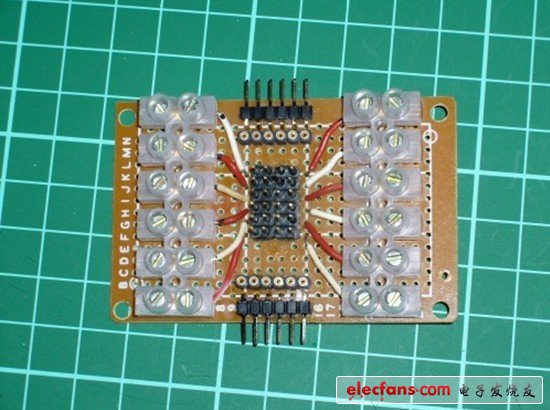
我還做了一個DIP轉陣腳的轉換器,這樣的話就可以在有需要的時候插入額外的IC。

做以上的準備主要是考驗了我焊接的能力,在過程有各種悲劇,不過終于還是完成了。
實際上這個履帶的輪子是由兩半組成的,我不確定是把它們固定在軸上或者是用膠水固定在指定點上面。因此我買了一些螺絲,并買了一些模型搞出了以下的東西。

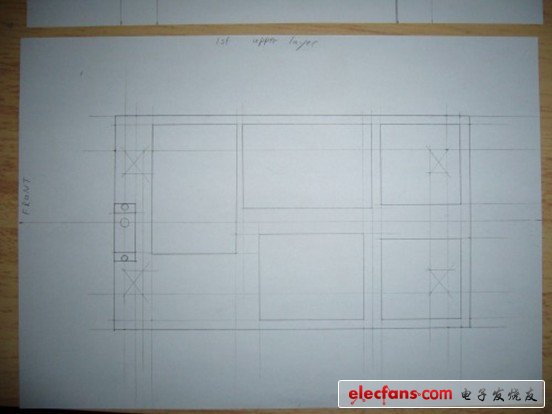
我用紙筆畫出了相應的模型圖及位置圖,下底部如下所示,這只是為了支撐,同時放電源和引擎的。
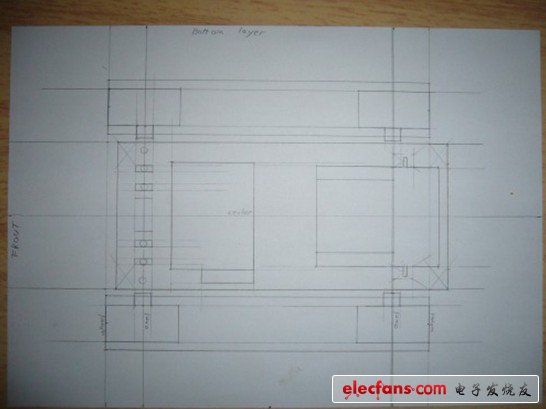
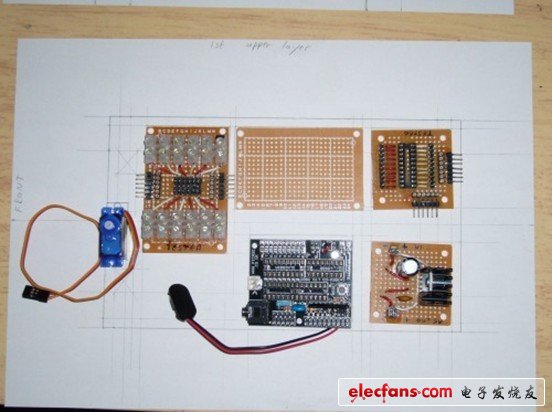
上部是控制、感應和可變的,因此需要空間放picaxe28x1,電壓穩壓器,線針轉換器,超聲波檢測器,同時還需要為之后添加額外的DIP芯片預留空間。
接下來就是組裝
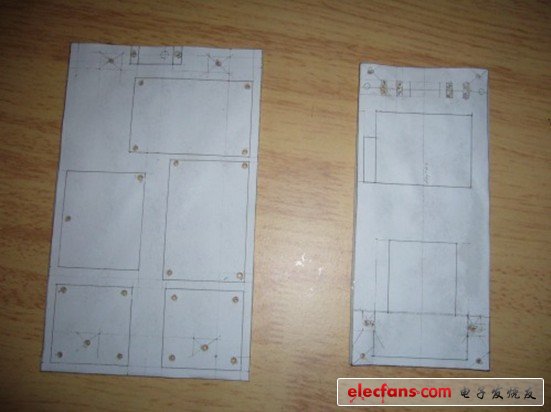
我用一些便宜的塑料板裁剪成我需要的形狀,我畫出了一個圖紙,并將它當做我鉆孔的指導。
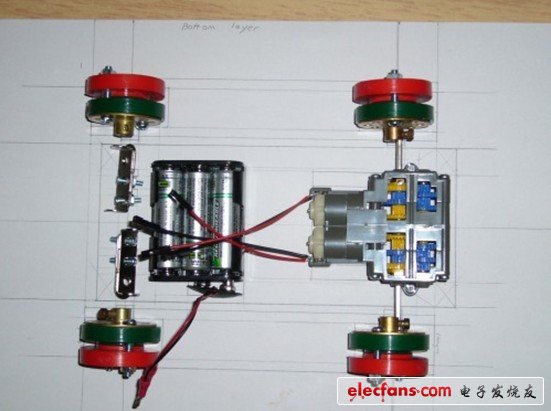
完成了之后我就可以裝配機器人的底部了,底部看起來是傾斜的,因此我我需要使用一種手段去保證上部的水平。我在電池槽離岸邊搞了些粘膠泡沫去固定它。但看起來還是能夠移動。
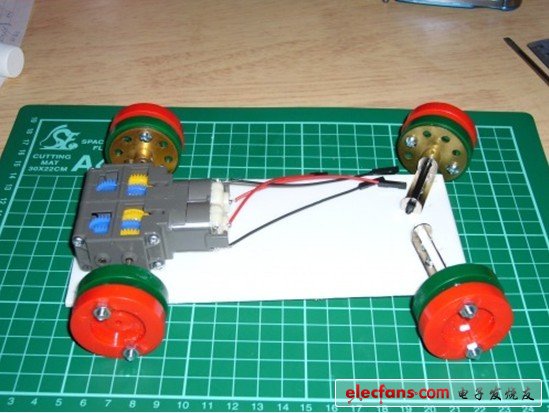
完成了組裝以后就得出了以下的一個模型。
之后就回到電氣和程序方面的工作
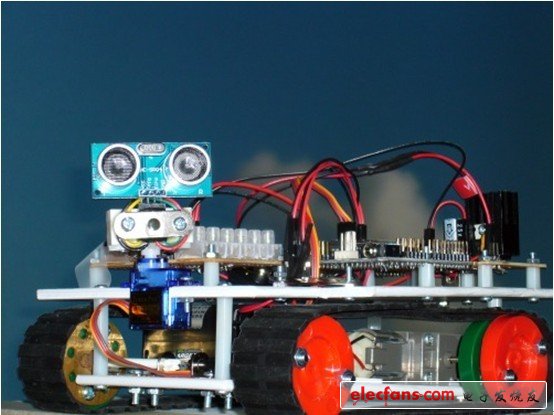
我需要去搞出一些一些容納伺服電機的空間以便可以轉動機器人的“頭部”。我又繼續用到那個便宜的塑料板,我同時會制造一些孔槽保證那些線遠離履帶,然后將間隔器放在適當的位置,這樣的話可以抬高PCB,并將它們固定。

接下來就是安裝頂部,安裝好電機以后,我在電池和穩壓器間裝個開關,這樣的話我就可以斷開所有的元器件,那樣在我把機器人停下來的時候就不需要拔掉任何東西。

然后就放上PCB,在安裝之前,我們需要檢查過所有的東西都是沒問題的,以避免給后面的工作帶來麻煩。
接下來是我一直糾結的問題,我究竟該怎樣把超聲波傳感器連接到電機上,并要有一定的角度保證其向前,并要盡量使傳感器在更低的位置,以保證它能看到更小的物體,從而能夠避開。我最后決定在一個塑料疊層板上DIY,將那些板以一定的角度連接,并連上一個4pin的接收器,在上面加些東西使其頭部能夠輕易轉動,在一定位置鞏固螺栓,以便可以在上面使用環氧樹脂膠。接下來就是線的問題,相對于我的剝線器來說,這些線實在太小了。但我最終用打火機搞定。然后就連接上了相對應的線路。記住要用到適合的線。否則焊接的時候你就會感到悲劇了。
我把那些線都分開,同時在適當的位置裝上擴展針槽。

最后將他們組裝在一起,下面是它的成品圖
為了方便焊接,我買了一個放大鏡,如下圖所示

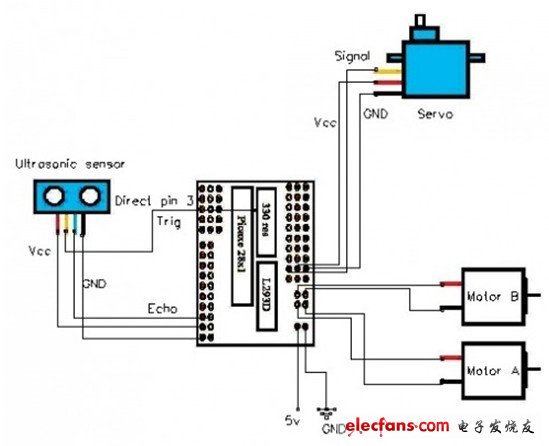
然后我決定去畫一個電路圖,
之后我進行了編程,并在調試的過程中發現并解決了一些小問題。在完成所有的工作之后去測試我的機器人,可得知,在光滑的路面上,機器人的抓地能力都是不錯的,機器人在木質地板上轉360度僅僅需要9秒鐘。
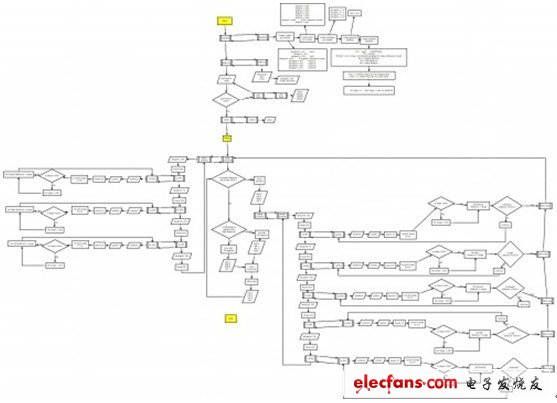
作者用DIA流程圖軟件去調試,并發現了一些問題,但由于LMR軟件不允許作者上傳實際的DIA版本,因此做了一個迷你的總體流程圖。
-
傳感器
+關注
關注
2552文章
51383瀏覽量
756012 -
機器人
+關注
關注
211文章
28632瀏覽量
208096 -
DIY
+關注
關注
176文章
888瀏覽量
349023 -
電子制作
+關注
關注
142文章
310瀏覽量
151155 -
超聲波傳感器
+關注
關注
18文章
586瀏覽量
35985 -
避障機器人
+關注
關注
0文章
18瀏覽量
7719
發布評論請先 登錄
相關推薦
Sonair推出用于機器人避障的3D超聲波傳感器
第七章-V1.5 STM32超聲波測距STM32F103C8t6超聲波避障小車 超聲波避障模塊 STM32超聲波測距

解讀工業機器人避障常用的視覺傳感器、激光傳感器、紅外傳感器、超聲波傳感器

水下測距傳感器:泳池清潔機器人精準定位的必備智能感知“神器”






 工商網監
工商網監
評論