") XV7011BB可為智能割草機的導航系統(tǒng)提供新的解決方案
XV7011BB可為智能割草機的導航系統(tǒng)提供新的解決方案
智能割草機作為現(xiàn)代家庭和商業(yè)草坪維護保養(yǎng)的重要工具,其精確的定位和導航系統(tǒng)對于提高機器工作效率和確保安全運行至關重要。在智能割草機的發(fā)展歷程中,定位和導航技術一直是關鍵的創(chuàng)新點。
傳統(tǒng)的基于RTK(實時動態(tài)差分定位技術)技術的割草機雖然在開闊地帶表現(xiàn)出色,但在家庭花園等封閉或半封閉空間中,其性能受限于GPS信號的遮擋和干擾,導致定位不準確引起位置漂移,甚至頻繁丟失信號。此外,RTK系統(tǒng)一般由基準站、數(shù)據(jù)鏈、流動站三部分組成,系統(tǒng)復雜、成本高昂、維護及校準數(shù)據(jù)門檻高等原因也限制了RTK系統(tǒng)智能割草機的普及。
針對這些挑戰(zhàn),EPSON單軸陀螺儀XV7011BB可為智能割草機的導航系統(tǒng)提供新的解決方案。該產(chǎn)品支持SPI/I2C 輸出接口,16/24bit角速度輸出:工作溫度范圍 -20°C to +80°C(選項:-40°C to +85°C),具有非常出色的零偏穩(wěn)定性,內(nèi)置溫度傳感器及可選擇的數(shù)字濾波器,進一步確保信號的穩(wěn)定輸出;工作電壓范圍在2.7~3.6V之間,提供SPI/I2C輸出接口,封裝尺寸僅為5mm*3.2mm*1.3mm,方便控制系統(tǒng)集成。
相比于傳統(tǒng)的RTK系統(tǒng),XV7011BB單軸陀螺儀在封閉或半封閉空間中表現(xiàn)出更高的穩(wěn)定性和準確性。其+100“/s的測量范圍能夠滿足割草機在正常工作條件下可能遇到的各種角速度變化,而在16位分辨率下,能夠檢測到最小為0.00305°/s的角速度變化,在24位分辨率下更是降低至0.0000119°/s,保證了極高的測量精度。這意味著即使在樹木繁茂或墻壁環(huán)繞的環(huán)境中,XV7011BB也能提供穩(wěn)定的角速度數(shù)據(jù),確保割草機的導航系統(tǒng)持續(xù)工作。
此外,在割草機應用中通過對角速度數(shù)據(jù)的實時分析,控制系統(tǒng)可以計算出機器的實際姿態(tài)和運動趨勢。這包括檢測旋轉、側傾、轉彎或其他非直線運動。再結合其他傳感器(如超聲波、紅外或攝像頭)的數(shù)據(jù),割草機的控制系統(tǒng)可以精確地調(diào)整方向和速度,以避免碰撞并繼續(xù)沿著預定的路徑割草,同時也為避障系統(tǒng)提供了必要的數(shù)據(jù)支持。
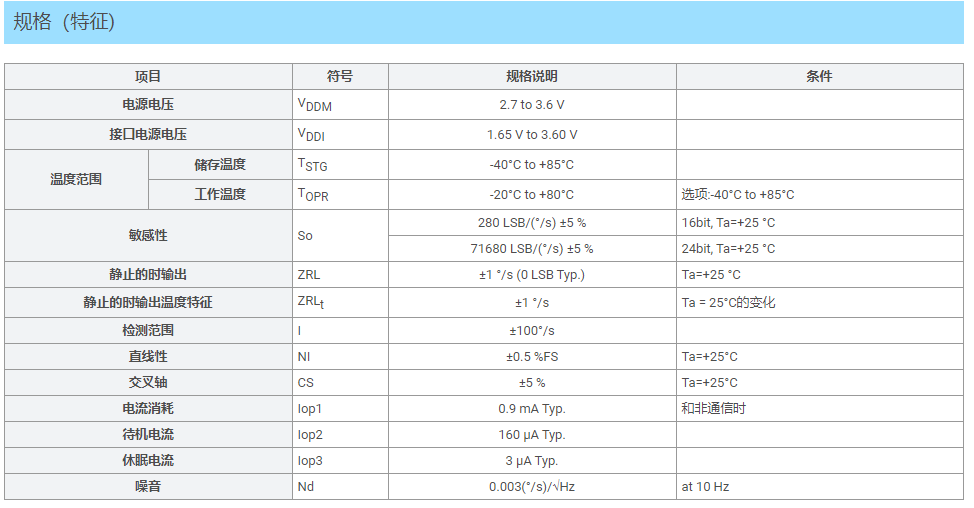
相對于RTK系統(tǒng)需要持續(xù)接收和處理復雜的GPS信號通常具有較高的功耗(工作態(tài)電流消耗在幾百毫安左右),單軸陀螺儀XV7011BB的低功耗特性對于電池供電的割草機來說是一個顯著優(yōu)勢。XV7011BB芯片由于不依賴外部信號,在非通信狀態(tài)下典型電流消耗為0.9mA,待機電流僅為160μA,休眠電流更是低至3μA。在功耗和電流消耗方面,XV7011BB單軸陀螺儀明顯優(yōu)于RTK系統(tǒng)定位模塊。這有助于延長割草機的工作時間,減少充電頻率,提高用戶的便利性。
0.003(°/s)/Hz at 10Hz低噪聲特性,減少運行誤判
低噪聲特性是陀螺儀性能的一個重要指標,噪聲會導致陀螺儀輸出的信號與實際角速度之間的誤差,從而降低測量的精度。
對于消費級和工業(yè)級MEMS陀螺儀,聲水平通常在以下范圍內(nèi):
消費級陀螺儀:噪聲水平可能在0.01(°/s)NHz到0.1(°/s)/Hz之間,這些陀螺儀通常用于游戲控制器、智能手機和其他低成本應用。
工業(yè)級陀螺儀:噪聲水平可能在0.01(°/s)NHz以下,這些陀螺儀適用于需要更高精度的工業(yè)和應用。
高精度陀螺儀:對于高精度應用,如性導航系統(tǒng),聲水平可能更低,甚至可以達到
0.001(°/s)/VHz或更低。
XV7011BB單軸陀螺儀的噪聲參數(shù)為0.003(°/s)/Hz at 10Hz,這個值在工業(yè)級和高精度應用中是比較低的。意味著XV7011BB單軸陀螺儀在這個頻率下輸出的角速度信號變化在0.003°/s的范圍內(nèi),確保了陀螺儀輸出的信號更加接近實際的角速度變化,可減少了因聲引起的誤判,提高了避障系統(tǒng)的準確性。
-
陀螺儀
+關注
關注
44文章
784瀏覽量
98716 -
導航系統(tǒng)
+關注
關注
2文章
266瀏覽量
30713 -
割草機器人
+關注
關注
0文章
16瀏覽量
795
發(fā)布評論請先 登錄
相關推薦
割草機器人工作中常見障礙物及避障解決方案

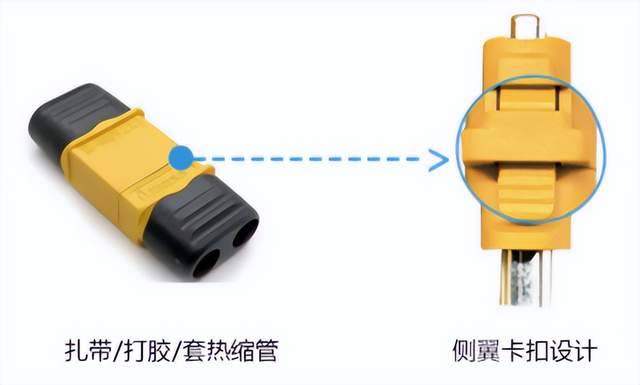
智能割草機成出海熱門:應選擇什么連接器
基于RK3588的割草機器人應用解決方案

愛普生(EPSON)高穩(wěn)定性陀螺儀傳感器:XV7181BB 51.000kHz F(X2A0004011002)
愛普生(EPSON) 慣性測量單元(IMU)、陀螺儀傳感器等模塊應用領域選型介紹

廣和通智能割草機行業(yè)解決方案亮相SPOGA+GAFA,盡展AI領潮者風范

XV7181BB陀螺儀傳感器在自動割草機中的應用

愛普生開發(fā)出全新X2A0002710002 XV7011BB陀螺儀傳感器用于高精設備行業(yè)

XV4001系列陀螺儀傳感器廣泛用于車載導航系統(tǒng)
XV7011BB陀螺儀傳感器廣泛用于工業(yè)應用
用于自動化機器的數(shù)字輸出型陀螺儀傳感器:XV7081BB
用于AGV物流機器人的愛普生陀螺儀傳感器XV7000系列:XV7001BB,XV7011BB

陀螺儀傳感器,IMU和加速度計的產(chǎn)品和選型
愛普生高精度慣性導航模塊賦能無人割草機新賽道






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論