 數控機床的運動方式采用什么原則
數控機床的運動方式采用什么原則
數控機床(Computer Numerical Control Machine Tool,簡稱CNC機床)是一種通過計算機程序控制的自動化機床。數控機床的運動方式是實現加工精度和效率的關鍵因素之一。本文將詳細介紹數控機床的運動方式采用的原則,包括運動控制、運動學、動力學和結構設計等方面。
一、運動控制原則
1.1 開環控制與閉環控制
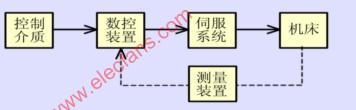
數控機床的運動控制可以分為開環控制和閉環控制兩種方式。開環控制是指數控系統根據輸入的程序指令,直接控制伺服電機驅動機床運動,而不需要對運動過程進行實時監控。開環控制的優點是結構簡單、成本較低,但精度和穩定性相對較差。
閉環控制則是在開環控制的基礎上,增加了對機床運動狀態的實時監測和反饋。通過安裝在機床上的傳感器,實時檢測機床的運動狀態,并將信息反饋給數控系統。數控系統根據反饋信息調整伺服電機的控制信號,以實現更高精度和穩定性的運動控制。閉環控制的優點是精度高、穩定性好,但成本相對較高。
1.2 脈沖編碼器與絕對編碼器
在數控機床的運動控制中,編碼器是實現位置反饋的關鍵元件。編碼器可以分為脈沖編碼器和絕對編碼器兩種類型。
脈沖編碼器是一種增量式編碼器,它通過測量伺服電機的旋轉角度來實現位置反饋。脈沖編碼器的優點是結構簡單、成本較低,但需要在每次開機時進行零點校準。
絕對編碼器則是一種絕對式編碼器,它可以直接測量機床的絕對位置。絕對編碼器的優點是無需零點校準,精度和穩定性更高,但成本相對較高。
1.3 伺服電機與步進電機
數控機床的運動控制通常采用伺服電機或步進電機作為驅動元件。伺服電機具有高響應性、高精度和高穩定性的特點,適用于高速、高精度的數控機床。步進電機則具有結構簡單、成本較低的優點,適用于低速、低精度的數控機床。
二、運動學原則
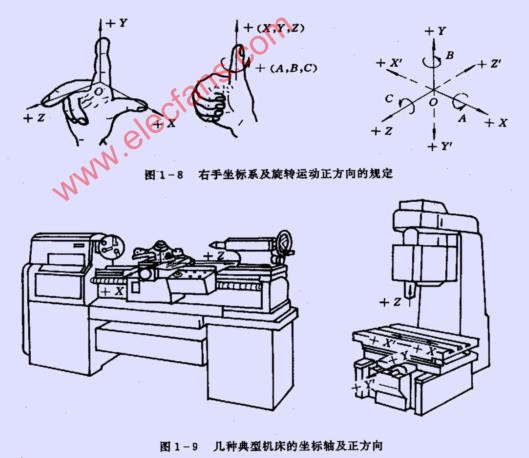
2.1 直線運動與旋轉運動
數控機床的運動方式主要包括直線運動和旋轉運動。直線運動是指機床的某個軸沿著直線軌跡進行運動,如X軸、Y軸和Z軸。旋轉運動則是指機床的某個軸或工件進行旋轉,如A軸、B軸和C軸。
2.2 運動學模型
為了實現數控機床的精確運動控制,需要建立運動學模型。運動學模型主要包括正運動學和逆運動學。
正運動學是指根據數控系統的輸入指令,計算出機床各軸的實際運動軌跡。逆運動學則是根據工件的加工要求,計算出數控系統需要輸出的指令。
2.3 插補算法
插補算法是數控機床實現復雜運動軌跡的關鍵技術。插補算法的主要任務是根據數控系統的輸入指令,計算出機床各軸的實時運動速度和加速度。
常見的插補算法有線性插補、圓弧插補、樣條插補等。線性插補適用于直線運動,圓弧插補適用于圓弧運動,樣條插補則適用于復雜的曲線運動。
三、動力學原則
3.1 靜力學與動力學
數控機床的運動方式需要考慮靜力學和動力學兩個方面。靜力學主要研究機床在靜止狀態下的受力情況,如切削力、支撐力等。動力學則研究機床在運動過程中的受力情況,如慣性力、離心力等。
3.2 剛度與阻尼
數控機床的運動性能受到剛度和阻尼的影響。剛度是指機床抵抗變形的能力,剛度越高,機床的運動精度和穩定性越好。阻尼則是指機床在運動過程中消耗能量的能力,阻尼越大,機床的振動和噪音越小。
3.3 動態性能分析
為了提高數控機床的運動性能,需要進行動態性能分析。動態性能分析主要包括模態分析、頻率響應分析和時域分析等。
模態分析用于研究機床的固有頻率和振型,以優化機床的結構設計。頻率響應分析用于研究機床在不同頻率下的響應特性,以優化運動控制系統的設計。時域分析則用于研究機床在實際運動過程中的性能表現,以優化機床的運動控制策略。
四、結構設計原則
4.1 剛性與輕量化
數控機床的結構設計需要兼顧剛性和輕量化。剛性是指機床抵抗變形的能力,剛性越高,機床的運動精度和穩定性越好。輕量化則是指在保證剛性的前提下,盡量減輕機床的重量,以提高運動速度和響應性。
4.2 熱穩定性
數控機床在運動過程中會產生熱量,熱量會導致機床的熱變形,影響加工精度。因此,數控機床的結構設計需要考慮熱穩定性,如采用熱對稱結構、設置散熱裝置等。
-
計算機
+關注
關注
19文章
7494瀏覽量
87962 -
伺服電機
+關注
關注
85文章
2048瀏覽量
57875 -
自動化
+關注
關注
29文章
5578瀏覽量
79283 -
數控機床
+關注
關注
19文章
781瀏覽量
46417
發布評論請先 登錄
相關推薦
智能化數控機床的意義
基于RBAC的數控機床信息集成系統
數控機床操作實驗
何謂數控機床,數控機床的英文全稱
數控機床的坐標和運動方向的規定





 工商網監
工商網監
評論