 【GD32F303紅楓派開發板使用手冊】第十二講 ADC-雙軸按鍵搖桿多通道循環采樣實驗
【GD32F303紅楓派開發板使用手冊】第十二講 ADC-雙軸按鍵搖桿多通道循環采樣實驗
12.1實驗內容
本實驗是通過ADC規則組多通道循環采樣方式實現雙軸按鍵搖桿傳感器x和y軸電壓值的讀取,通過本實驗主要學習以下內容:
- 雙軸按鍵搖桿傳感器工作原理
- DMA原理
- 規則組多通道循環采樣
12.2實驗原理
12.2.1雙軸按鍵搖桿傳感器工作原理
搖桿一般在航模中的無人機、電玩、遙控車、云臺等設備上應用廣泛,很多帶有屏幕的設備也經常使用搖桿作為菜單選擇的輸入控制。
雙軸按鍵搖桿主要由兩個電位器和一個按鍵開關組成,兩個電位器隨著搖桿扭轉角度分別輸出X、Y軸上對應的電壓值,在Z軸方向上按下搖桿可觸發輕觸按鍵,在配套機械結構的作用下,無外力扭動的搖桿初始狀態下,兩個電位器都處在量程的中間位置。
12.2.2DMA原理
本實驗中ADC通道有兩個,分別為搖桿傳感器x軸和y軸電壓,所以我們用規則組多通道采樣實現雙軸的電壓讀取,從上一章內容中可以知道,ADC規則組實現多通道轉換時,必須要用到DMA。下面我們介紹下DMA原理。
DMA(直接存儲器訪問控制器)是一個非常好用的外設,它提供了一種硬件的方式在外設和存儲器之間或者存儲器和存儲器之間傳輸數據,而無需CPU的介入,從而使CPU可以專注在處理其他系統功能上。GD32F303有兩個DMA,其中DMA0有7個通道,DMA1有5個通道。DMA的特性如下:
- 傳輸數據長度可編程配置,最大到 65536;
- 12 個通道,并且每個通道都可配置(DMA0有7個通道,DMA1有5個通道);
- AHB 和APB外設,片上閃存和SRAM都可以作為訪問的源端和目的端;
- 每個通道連接固定的硬件 DMA 請求;
- 支持軟件優先級(低、中、高、極高)和硬件優先級(通道號越低,優先級越高);
- 存儲器和外設的數據傳輸寬度可配置:字節,半字,字;
- 存儲器和外設的數據傳輸支持固定尋址和增量式尋址;
- 支持循環傳輸模式;
- 支持外設到存儲器,存儲器到外設,存儲器到存儲器的數據傳輸;
- 每個通道有 3 種類型的事件標志和獨立的中斷;
- 支持中斷的使能和清除。
DMA實現很簡單,只要配置好以下幾要素即可。
- 源地址和目標地址:DMA進行數據搬運過程為從源地址讀取到數據,再搬運到目標地址。本實驗中,需要把ADC轉換結果搬運到自定義的buffer中,所以源地址就要設置為ADCx_RDATA寄存器地址,目標地址為buffer地址。
- 源和目標的地址增量方式:地址增量方式有固定模式和增量模式兩種,固定模式是指進行一次DMA搬運后,下次搬運的源地址或目標地址保持不變;增量模式指進行一次DMA搬運后,下次搬運的源地址或目標地址會加1。本實驗中,源地址始終都應該為ADCx_RDATA地址,所以源地址增量方式需要設置為固定模式,而目標地址為自定義buffer,我們需要用buffer[0]存儲x軸數據,buffer[1]存儲y軸數據,所以目標地址增量方式需要設置為增量模式。
- DMA傳輸方向:DMA傳輸方向有三種,分別為外設地址->存儲器地址、存儲器地址->外設地址以及存儲器->存儲器。本實驗中源地址是外設地址,目標地址為自定義buffer地址即存儲器地址,故傳輸方向需設置為外設地址->存儲器地址。
- 源和目標數據位寬:源和目標數據位寬表示每次搬運的數據長度,可以設置為8bit、16bit和32bit。本實驗中ADC的數據只占用ADCx_RDATA寄存器的低半字即16bit,所以源和目標位寬選擇16bit即可。
- DMA傳輸個數和循環模式:傳輸個數表示一輪DMA傳輸可以搬運的次數。循環模式表示當一輪DMA傳輸結束后,是否直接進行下一輪搬運,當開啟循環模式后,當上一輪DMA傳輸結束后,源地址和目標地址會恢復到最開始的狀態。本實驗中,需要轉換2個通道ADC,故DMA傳輸個數設置為2,循環模式開啟。
- DMA通道優先級:DMA的每個通道都有一個軟件優先級,當DMA控制器在同一時間接收到多個外設請求時,仲裁器將根據外設請求的優先級來決定響應哪一個外設請求。優先級包括軟件優先級和硬件優先級,優先級規則如下:
軟件優先級:分為4級,低,中,高和極高。可以通過寄存器DMA_CHxCTL的PRIO位域來配置。
硬件優先級:當通道具有相同的軟件優先級時,編號低的通道優先級高。例:通道0和通道2配置為相同的軟件優先級時,通道0的優先級高于通道2。
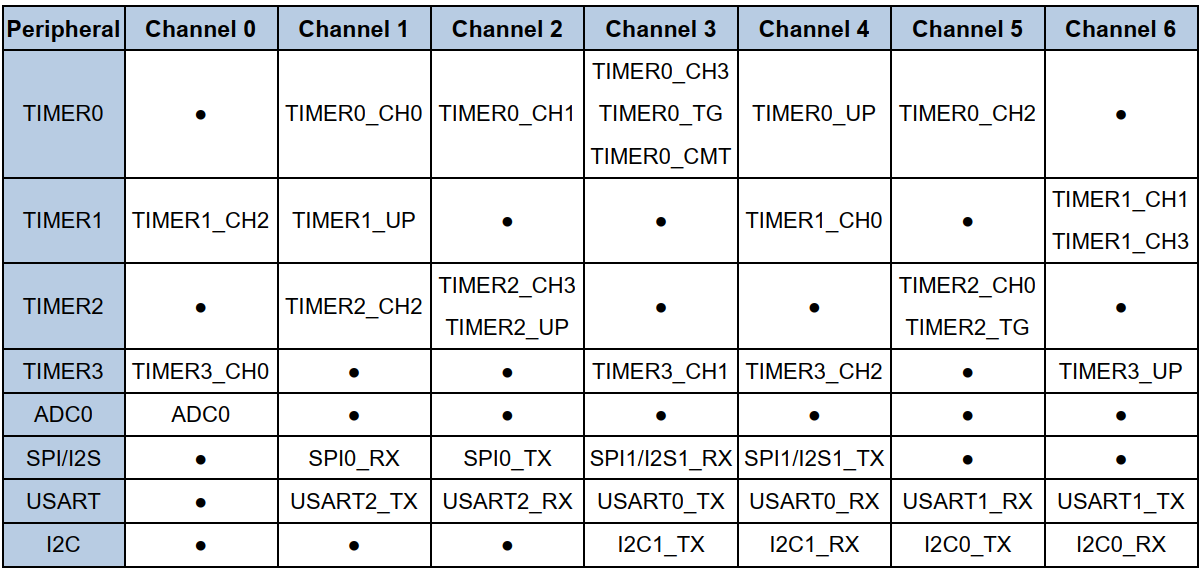
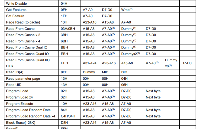
上面描述了DMA配置的一些要素,那么DMA是如何被觸發的呢,我們來看下DMA請求映射表:
DMA0各通道請求表:
DMA1各通道請求表:
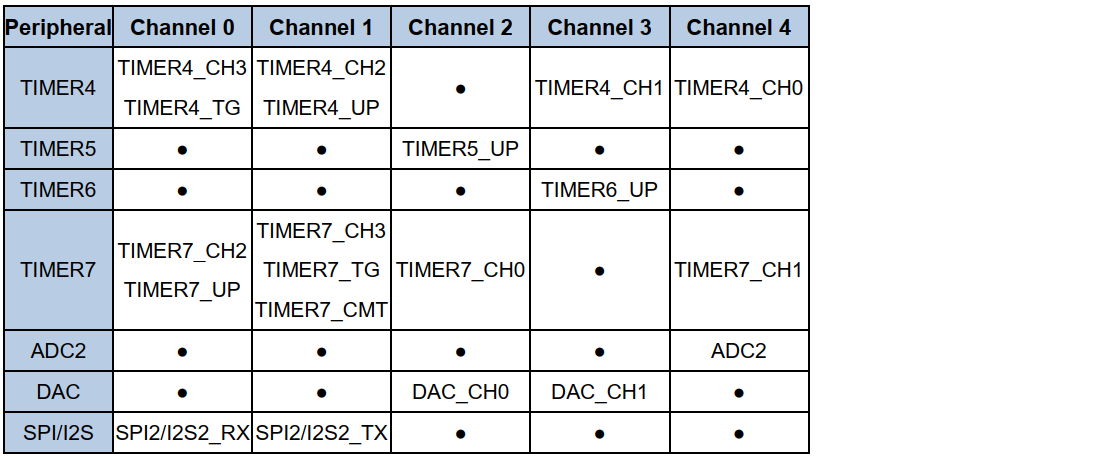

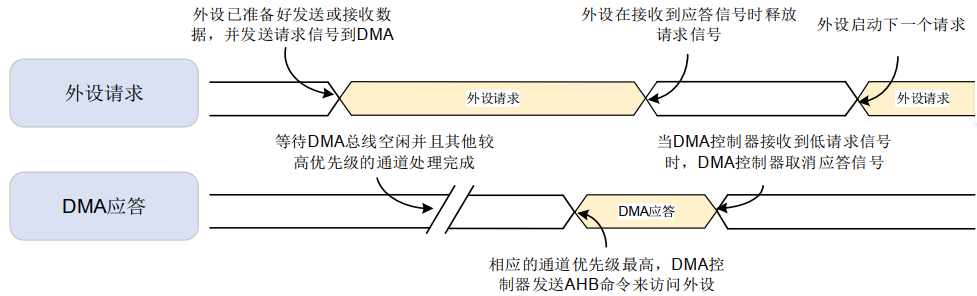
本實驗中是ADC配合DMA來使用,如果使用DMA去搬運ADC0的數據,從上表查詢得知需要使用DMA0的通道0,如果是搬運ADC2的數據,則要用到DMA1的通道4。如現在設置DMA1的通道4去搬運ADC2的數據,當ADC2每轉換一個通道,ADC2_RDATA會更新一次數據,此時ADC2會自動向DMA1的通道4發出一次搬運請求,DMA收到請求后會進行一次數據搬運。DMA的請求和應答方式見下圖:
12.3硬件設計
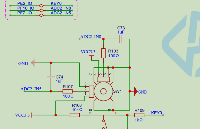
本實驗的原理圖如下:
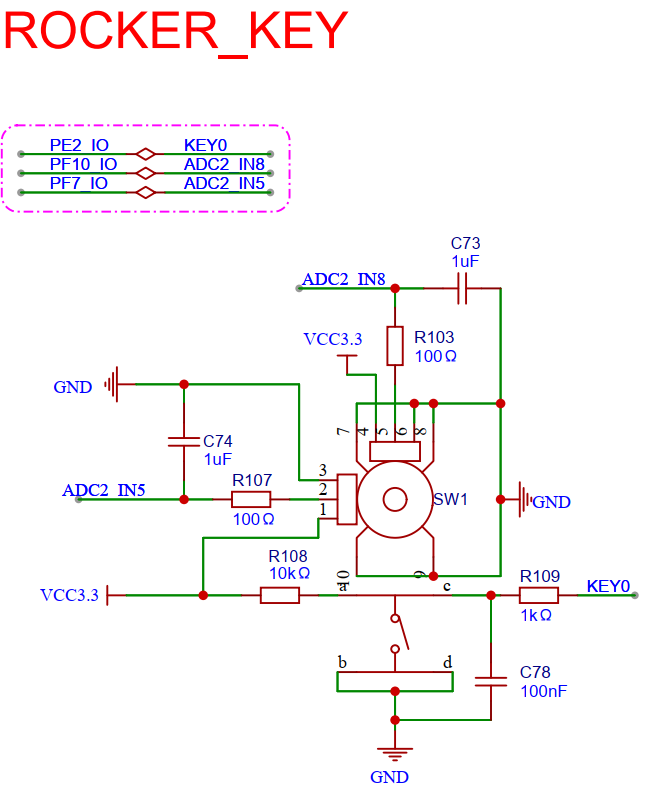
從原理圖中可以看出,搖桿的x、y軸分別接到了PF7和PF8,從Datasheet中可以查到PF7對應ADC2_CH5,PF8對應ADC2_CH6。
12.4代碼解析
本實驗用到兩個ADC2通道,使用ADC2規則組搭配DMA1通道4進行數據轉換和搬運,ADC2規則組和DMA1通道4都開啟循環模式,一旦開始ADC2規則組轉換,會持續對搖桿x、y軸電壓進行轉換和數據搬運。
12.4.1DMA和ADC初始化
在driver_adc.c中定義driver_adc_regular_ch_dma_config函數,該函數實現DMA和ADC的初始化。
| C void driver_adc_regular_ch_dma_config(typdef_adc_ch_general *ADC, typdef_adc_ch_parameter *ADC_CH,void *buffer) { dma_parameter_struct dma_data_parameter; /*DMA時鐘開啟*/ rcu_periph_clock_enable(ADC->dma_parameter.rcu_dma); /*DMA通道參數復位*/ dma_deinit(ADC->dma_parameter.dma_periph, ADC->dma_parameter.dma_channel); /*DMA源地址、目標地址、增量方式、傳輸位寬、傳輸方向、傳輸個數、優先級設置*/ dma_data_parameter.periph_addr = (uint32_t)(&ADC_RDATA(ADC->adc_port)); dma_data_parameter.periph_inc = DMA_PERIPH_INCREASE_DISABLE; dma_data_parameter.memory_addr = (uint32_t)(buffer); dma_data_parameter.memory_inc = DMA_MEMORY_INCREASE_ENABLE; if(ADC->adc_mode == ADC_DAUL_REGULAL_PARALLEL) { dma_data_parameter.periph_width = DMA_PERIPHERAL_WIDTH_32BIT; dma_data_parameter.memory_width = DMA_MEMORY_WIDTH_32BIT; } else { dma_data_parameter.periph_width = DMA_PERIPHERAL_WIDTH_16BIT; dma_data_parameter.memory_width = DMA_MEMORY_WIDTH_16BIT; } dma_data_parameter.direction = DMA_PERIPHERAL_TO_MEMORY; dma_data_parameter.number = ADC->dma_parameter.dma_number; dma_data_parameter.priority = ADC->dma_parameter.dma_priority; dma_init(ADC->dma_parameter.dma_periph, ADC->dma_parameter.dma_channel, &dma_data_parameter); /*DMA循環模式設置*/ if(ADC->dma_parameter.dma_circulation_mode == ENABLE) { dma_circulation_enable(ADC->dma_parameter.dma_periph, ADC->dma_parameter.dma_channel); } else { dma_circulation_disable(ADC->dma_parameter.dma_periph, ADC->dma_parameter.dma_channel); } /*使能DMA*/ dma_channel_enable(ADC->dma_parameter.dma_periph, ADC->dma_parameter.dma_channel); /*ADC初始化*/ driver_adc_config(ADC,ADC_CH); } |
在driver_adc.h中聲明了ADC DMA的結構體:
| C typedef struct __typdef_adc_dma_parameter { rcu_periph_enum rcu_dma;//DMA時鐘 uint32_t dma_periph;//DMA號 dma_channel_enum dma_channel;//DMA通道號 uint32_t dma_number;//DMA傳輸個數 uint32_t dma_priority;//DMA通道優先級 EventStatus dma_circulation_mode;//循環模式 }typdef_adc_dma_parameter; |
這段代碼比較簡單,請讀者按照前面介紹的DMA原理進行解析。
12.4.2搖桿ADC設置所需要的參數及IO口結構體定義
在bsp_adc.c中,對搖桿ADC設置所需要的參數及IO擴結構體數組進行了定義:
| C typdef_adc_ch_general Rocker_ADC= { .rcu_adc = RCU_ADC2,//ADC2的時鐘 .adc_psc = RCU_CKADC_CKAPB2_DIV6,//ADC2設置為APB2 6分頻 .adc_port = ADC2,//ADC口為ADC2 .adc_mode = ADC_MODE_FREE,//ADC模式為獨立模式 .adc_channel_group = ADC_REGULAR_CHANNEL,//使用規則組 .adc_scan_function = ENABLE,//開啟掃描模式 .adc_continuous_function = ENABLE,//開啟循環模式 .ch_count = 2,//轉換長度為2 .dma_parameter = { .rcu_dma = RCU_DMA1,//DMA1的時鐘 .dma_periph = DMA1,//使用DMA1 .dma_channel = DMA_CH4,//使用通道4 .dma_number = 2,//DMA傳輸長度為2 .dma_priority = DMA_PRIORITY_HIGH,//DMA通道優先級 .dma_circulation_mode = ENABLE//DMA循環模式打開 }, .trigger_source = ADC0_1_2_EXTTRIG_REGULAR_NONE,//ADC觸發源選擇為軟件觸發 .DMA_mode = ENABLE//使用DMA }; typdef_adc_ch_parameter Rocker_ch[2] = { { .rcu_port = RCU_GPIOF,//GPIOF時鐘 .port = GPIOF,//GPIO port .pin = GPIO_PIN_7,//PF7 .gpio_speed = GPIO_OSPEED_10MHZ,//PF7速度設置為10MHz .adc_channel = ADC_CHANNEL_5,//PF7是ADC2的通道5 .sample_time = ADC_SAMPLETIME_55POINT5//設置采樣周期為55.5 } , { .rcu_port = RCU_GPIOF,//GPIOF時鐘 .port = GPIOF,//GPIO port .pin = GPIO_PIN_8,//PF8 .gpio_speed = GPIO_OSPEED_10MHZ,//PF8速度設置為10MHz .adc_channel = ADC_CHANNEL_6,//PF8是ADC2的通道6 .sample_time = ADC_SAMPLETIME_55POINT5//設置采樣周期為55.5 } };//ADC通道參數配置,包括IO口,和對應通道以及采樣周期 |
12.4.3搖桿 ADC初始化和觸發ADC轉換的具體實現函數
在bsp_adc.c中定義了搖桿DMA和ADC初始化和觸發ADC轉換的函數:
| C uint16_t Rocker_data[2] ; void bsp_Rocker_ADC_config() { driver_adc_regular_ch_dma_config(&Rocker_ADC,Rocker_ch,(uint16_t*)Rocker_data); driver_adc_software_trigger_enable(&Rocker_ADC); } |
12.4.4main函數實現
| C int main(void) { delay_init();//延時函數初始化 bsp_uart_init(&BOARD_UART);//BOARD_UART串口初始化 bsp_Rocker_ADC_config();//搖桿ADC配置 while (1) { delay_ms(100);//延時100ms printf(" the Rocker x and y axis data is %d,%d \r\n", Rocker_data[0],Rocker_data[1]);//打印搖桿數據 } } |
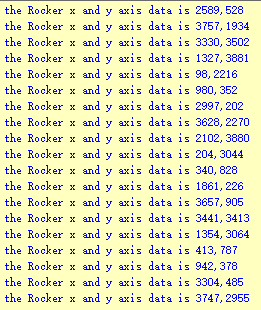
本例程main函數首先進行了延時函數初始化,為了演示實驗結果,這里初始化了BOARD_UART串口,關于串口的使用,請讀者參考串口章節,然后是搖桿ADC配置。在主循環中,每100ms打印一次搖桿x、y軸的ADC轉換數據。
12.5實驗結果
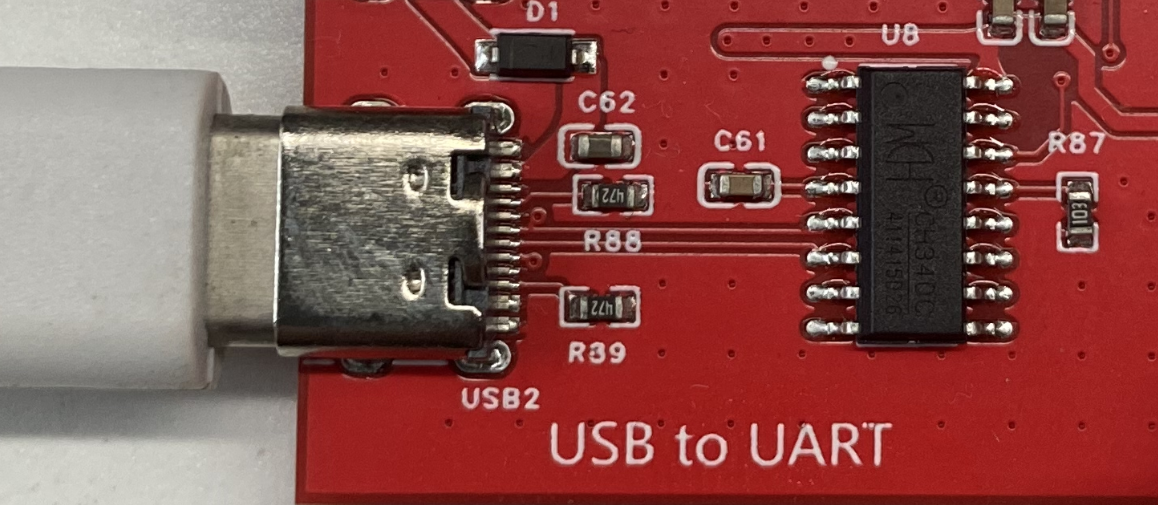
使用USB-TypeC線,連接電腦和板上USB to UART口后,配置好串口調試助手,即可看到搖桿打印數據了,搖動搖桿可以看到x、y軸ADC轉換數據的變化。
-
單片機
+關注
關注
6040文章
44592瀏覽量
636869 -
adc
+關注
關注
98文章
6524瀏覽量
545197 -
開發板
+關注
關注
25文章
5093瀏覽量
97802 -
GD32
+關注
關注
7文章
404瀏覽量
24404
發布評論請先 登錄
相關推薦
【星空派GD32F303開發板試用體驗】開發記錄匯總
【星空派GD32F303開發板試用體驗】開箱+環境搭建
【星空派GD32F303開發板試用體驗】開箱+環境搭建
STM32CUBEMX開發GD32F303(10)----雙ADC輪詢模式掃描多個通道

GD32F303固件庫開發
【GD32F470紫藤派開發板使用手冊】第八講 ADC-規則組多通道采樣實驗
【GD32H757Z海棠派開發板使用手冊】第八講 ADC-規則組多通道采樣實驗
【GD32F303紅楓派開發板使用手冊】第二講 GPIO-流水燈實驗
【GD32F303紅楓派開發板使用手冊】第三講 GPIO-按鍵查詢檢測實驗
【GD32F303紅楓派開發板使用手冊】第五講 FMC-片內Flash擦寫讀實驗

【GD32F303紅楓派開發板使用手冊】第十三講 ADC-內部溫度傳感器和參考電壓采樣實驗
【GD32F303紅楓派開發板使用手冊】第十六講 USART-DMA串口收發實驗
【GD32F303紅楓派開發板使用手冊】第二十講 SPI-SPI NAND FLASH讀寫實驗





 工商網監
工商網監
評論