 伺服編碼器分辨率是什么意思
伺服編碼器分辨率是什么意思
伺服編碼器分辨率是指編碼器能夠檢測到的最小角度或位置變化。在伺服系統中,編碼器用于測量電機軸或負載的位置和速度,以實現精確控制。分辨率越高,編碼器能夠檢測到的最小變化越小,從而實現更精確的控制。
- 伺服編碼器分辨率的概念
伺服編碼器是一種用于測量電機軸或負載位置和速度的傳感器。它通過將機械位置轉換為電信號,為伺服控制系統提供反饋信息。編碼器的分辨率是指它能夠檢測到的最小角度或位置變化,通常以脈沖數或位表示。
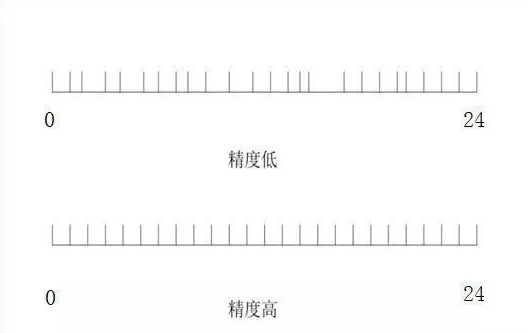
分辨率越高,編碼器能夠檢測到的最小變化越小,從而實現更精確的控制。例如,一個分辨率為1000脈沖/轉的編碼器,每轉能夠檢測到1000個位置變化,而一個分辨率為10000脈沖/轉的編碼度器,每轉能夠檢測到10000個位置變化。
- 伺服編碼器分辨率的分類
伺服編碼器的分辨率可以分為以下幾類:
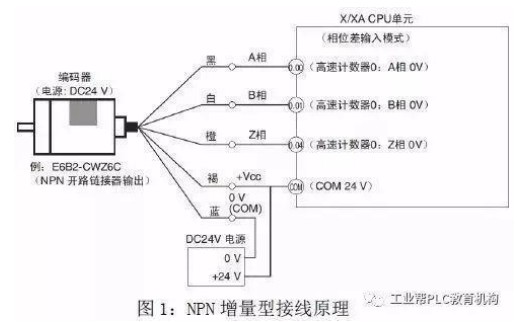
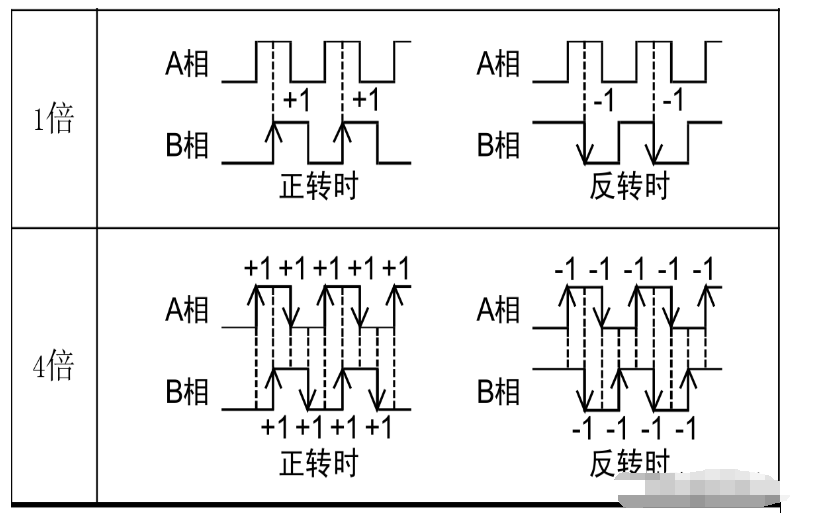
2.1 增量式編碼器
增量式編碼器只能提供相對于某個參考點的位置信息。它通過檢測編碼器軸的旋轉方向和速度,生成脈沖信號。增量式編碼器的分辨率取決于其內部的光柵或磁柵的線數。
2.2 絕對式編碼器
絕對式編碼器能夠提供相對于零點的絕對位置信息。它通過檢測編碼器軸的旋轉角度,生成與位置相對應的數字信號。絕對式編碼器的分辨率取決于其內部的光柵或磁柵的線數以及編碼方式。
2.3 混合式編碼器
混合式編碼器結合了增量式和絕對式編碼器的優點,能夠在斷電后保持位置信息,同時提供高分辨率的位置反饋。
- 影響伺服編碼器分辨率的因素
伺服編碼器分辨率受多種因素影響,包括:
3.1 編碼器類型
不同類型的編碼器具有不同的分辨率。例如,增量式編碼器的分辨率通常較低,而絕對式編碼器的分辨率較高。
3.2 編碼器內部結構
編碼器內部的光柵或磁柵的線數直接影響其分辨率。線數越多,分辨率越高。
3.3 編碼方式
編碼器的編碼方式也會影響其分辨率。例如,二進制編碼方式的分辨率較低,而格雷碼編碼方式的分辨率較高。
3.4 信號處理技術
編碼器輸出的信號需要經過信號處理才能被控制系統識別。信號處理技術的好壞直接影響編碼器的分辨率。
- 伺服編碼器分辨率的測量方法
測量伺服編碼器分辨率的方法有以下幾種:
4.1 直接測量法
直接測量法是通過測量編碼器輸出的脈沖數來確定其分辨率。將編碼器連接到示波器或計數器,然后旋轉編碼器軸,記錄輸出的脈沖數。
4.2 間接測量法
間接測量法是通過測量編碼器的輸出信號與實際位置或角度的偏差來確定其分辨率。將編碼器安裝在測試臺上,然后旋轉編碼器軸,測量實際位置或角度與編碼器輸出信號的偏差。
4.3 比較法
比較法是通過比較不同分辨率的編碼器輸出信號來確定編碼器的分辨率。將兩個不同分辨率的編碼器安裝在同一測試臺上,然后旋轉編碼器軸,比較兩個編碼器輸出信號的差異。
- 伺服編碼器分辨率的應用場景
伺服編碼器分辨率在各種應用場景中都有重要作用,包括:
5.1 工業自動化
在工業自動化領域,伺服編碼器用于控制機器人、機床、輸送帶等設備的位置和速度,以實現精確控制。
5.2 航空航天
在航空航天領域,伺服編碼器用于控制衛星、飛機、導彈等設備的姿態和軌道,以實現精確導航。
5.3 醫療設備
在醫療設備領域,伺服編碼器用于控制手術機器人、CT掃描儀、核磁共振等設備的位置和速度,以實現精確診斷和治療。
5.4 能源領域
在能源領域,伺服編碼器用于控制風力發電機、太陽能跟蹤系統等設備的位置和速度,以實現高效能源利用。
- 伺服編碼器分辨率與其他參數的關系
伺服編碼器分辨率與其他參數之間存在一定的關系,包括:
6.1 分辨率與精度
分辨率越高,編碼器能夠檢測到的最小變化越小,從而實現更精確的控制。但是,實際應用中,系統的精度還受到其他因素的影響,如機械結構、控制系統等。
-
機械
+關注
關注
8文章
1573瀏覽量
40551 -
伺服系統
+關注
關注
14文章
573瀏覽量
39214 -
電信號
+關注
關注
1文章
817瀏覽量
20581 -
伺服編碼器
+關注
關注
5文章
15瀏覽量
3101
發布評論請先 登錄
相關推薦
光學編碼器分辨率的定義方法
伺服電機編碼器精度與分辨率
伺服電機編碼器分辨率
編碼器怎么計算距離,編碼器分辨率是什么
編碼器的分辨率如何理解?
旋轉編碼器的分辨率如何選擇?
影響編碼器分辨率和精度的因素
選擇增量編碼器分辨率的方法,影響增量式編碼器分辨率的因素

伺服編碼器分辨率越高越快嗎
伺服編碼器分辨率越高越快嗎?






 工商網監
工商網監
評論