") 巡線機(jī)器人電路圖 巡線機(jī)器人的工作原理和應(yīng)用領(lǐng)域
巡線機(jī)器人電路圖 巡線機(jī)器人的工作原理和應(yīng)用領(lǐng)域
引言
巡線機(jī)器人,作為一種先進(jìn)的智能巡檢設(shè)備,近年來在多個(gè)領(lǐng)域得到了廣泛應(yīng)用。它以移動(dòng)機(jī)器人為載體,搭載多種檢測(cè)儀器,通過機(jī)器視覺、電磁場(chǎng)、GPS、GIS等多場(chǎng)信息融合技術(shù),實(shí)現(xiàn)自主移動(dòng)、自主巡檢與數(shù)據(jù)分析。本文將詳細(xì)闡述巡線機(jī)器人的定義、工作原理及其在多個(gè)領(lǐng)域的應(yīng)用,以及還將分享一些巡線機(jī)器人電路圖,以期為讀者提供一個(gè)全面而深入的了解。
一、巡線機(jī)器人的定義
巡線機(jī)器人,顧名思義,是一種專門用于沿著特定線路(如電力線路、鐵路軌道、管道走廊等)進(jìn)行巡檢的機(jī)器人。它以移動(dòng)機(jī)器人作為載體,通過搭載可見光攝像機(jī)、紅外熱成像儀、激光雷達(dá)等多種傳感器和檢測(cè)儀器,實(shí)現(xiàn)對(duì)目標(biāo)線路及其周圍環(huán)境的全面監(jiān)控與檢測(cè)。巡線機(jī)器人不僅具備自主移動(dòng)與導(dǎo)航能力,還能進(jìn)行障礙物檢測(cè)識(shí)別、自主作業(yè)規(guī)劃、自主越障等復(fù)雜操作,是工業(yè)自動(dòng)化、智能巡檢領(lǐng)域的重要?jiǎng)?chuàng)新成果。
二、巡線機(jī)器人的工作原理
1. 導(dǎo)航與定位
巡線機(jī)器人的核心在于其自主導(dǎo)航與定位能力。這主要依賴于機(jī)器視覺、電磁場(chǎng)檢測(cè)、GPS定位以及GIS地理信息系統(tǒng)等多種技術(shù)的綜合應(yīng)用。在巡檢過程中,機(jī)器人首先通過視覺傳感器捕捉線路標(biāo)志或周圍環(huán)境特征,利用圖像處理技術(shù)識(shí)別并定位自身位置。同時(shí),結(jié)合GPS信號(hào)和GIS地圖信息,機(jī)器人能夠?qū)崟r(shí)更新自身位置,確保沿著預(yù)定線路準(zhǔn)確行進(jìn)。
2. 障礙物檢測(cè)與識(shí)別
為了保障巡檢任務(wù)的順利進(jìn)行,巡線機(jī)器人還具備強(qiáng)大的障礙物檢測(cè)與識(shí)別能力。這主要通過激光雷達(dá)、超聲波傳感器等測(cè)距設(shè)備實(shí)現(xiàn)。在行進(jìn)過程中,機(jī)器人會(huì)不斷掃描周圍環(huán)境,檢測(cè)并識(shí)別出可能存在的障礙物(如樹木、建筑物、其他設(shè)施等)。一旦發(fā)現(xiàn)障礙物,機(jī)器人會(huì)立即啟動(dòng)避障算法,規(guī)劃出安全的繞行路徑,確保巡檢任務(wù)不受影響。
3. 自主作業(yè)規(guī)劃與執(zhí)行
巡線機(jī)器人不僅具備自主導(dǎo)航和避障能力,還能根據(jù)巡檢任務(wù)的具體要求,自主規(guī)劃作業(yè)流程并執(zhí)行相應(yīng)操作。這包括設(shè)定巡檢路線、調(diào)整檢測(cè)參數(shù)、啟動(dòng)檢測(cè)儀器等。通過嵌入式計(jì)算機(jī)作為控制系統(tǒng)的軟硬件開發(fā)平臺(tái),機(jī)器人能夠?qū)崟r(shí)處理傳感器數(shù)據(jù),分析巡檢結(jié)果,并根據(jù)分析結(jié)果調(diào)整后續(xù)巡檢策略。
4. 數(shù)據(jù)采集與傳輸
巡線機(jī)器人在巡檢過程中會(huì)收集大量圖像、視頻、溫度、濕度等數(shù)據(jù)信息。這些數(shù)據(jù)通過機(jī)器人內(nèi)部的存儲(chǔ)系統(tǒng)進(jìn)行自動(dòng)存儲(chǔ),并通過無線通信技術(shù)實(shí)時(shí)傳輸至遠(yuǎn)程監(jiān)控中心。監(jiān)控中心的工作人員可以通過電腦或移動(dòng)設(shè)備遠(yuǎn)程查看巡檢畫面和數(shù)據(jù)報(bào)告,及時(shí)了解線路運(yùn)行狀態(tài)和潛在問題。
5. 自主越障與適應(yīng)性調(diào)整
面對(duì)復(fù)雜多變的巡檢環(huán)境,巡線機(jī)器人還具備自主越障和適應(yīng)性調(diào)整的能力。通過機(jī)械臂、履帶或輪腿等結(jié)構(gòu)設(shè)計(jì),機(jī)器人能夠輕松跨越溝壑、樓梯、障礙物等復(fù)雜地形。同時(shí),機(jī)器人還具備自動(dòng)調(diào)節(jié)高度、角度和速度等參數(shù)的能力,以適應(yīng)不同的巡檢場(chǎng)景和需求。
三、巡線機(jī)器人的應(yīng)用領(lǐng)域
1. 電力行業(yè)
在電力行業(yè),巡線機(jī)器人被廣泛應(yīng)用于電力線路的巡檢和維護(hù)工作。它們能夠沿著高壓線路、變電站等區(qū)域進(jìn)行自主巡檢,檢測(cè)線路故障、設(shè)備老化、溫度異常等問題。通過紅外熱成像儀等檢測(cè)設(shè)備,機(jī)器人還能及時(shí)發(fā)現(xiàn)并預(yù)警潛在的火災(zāi)隱患和過熱現(xiàn)象。此外,巡線機(jī)器人還能在惡劣天氣條件下進(jìn)行巡檢工作,大大提高了電力巡檢的效率和安全性。
2. 鐵路和交通運(yùn)輸業(yè)
在鐵路和交通運(yùn)輸領(lǐng)域,巡線機(jī)器人同樣發(fā)揮著重要作用。它們可以在鐵路軌道上自主巡檢信號(hào)燈、軌道、道岔等設(shè)施的運(yùn)行狀態(tài),及時(shí)發(fā)現(xiàn)并解決故障和安全隱患。通過機(jī)器視覺技術(shù),機(jī)器人還能對(duì)軌道進(jìn)行高精度測(cè)量和定位,為鐵路維護(hù)提供精確的數(shù)據(jù)支持。此外,在交通運(yùn)輸樞紐內(nèi),巡線機(jī)器人還能協(xié)助進(jìn)行車輛調(diào)度和安全管理等工作。
3. 石油和天然氣行業(yè)
在石油和天然氣行業(yè),巡線機(jī)器人被用于巡檢管道、儲(chǔ)罐和井場(chǎng)等設(shè)施。它們能夠沿著管道走廊自主行進(jìn),檢測(cè)管道泄漏、腐蝕、破損等問題。通過搭載的氣體檢測(cè)傳感器和紅外熱成像儀等設(shè)備,機(jī)器人還能實(shí)時(shí)監(jiān)測(cè)管道周圍的環(huán)境參數(shù)和潛在危險(xiǎn)源。這有助于及時(shí)發(fā)現(xiàn)并處理安全隱患,保障石油和天然氣行業(yè)的安全生產(chǎn)。
4. 制造業(yè)
在制造業(yè)領(lǐng)域,巡線機(jī)器人被應(yīng)用于生產(chǎn)線上的設(shè)備巡檢和產(chǎn)品質(zhì)量檢測(cè)。它們能夠沿著生產(chǎn)線自主行進(jìn),檢測(cè)設(shè)備的運(yùn)行狀態(tài)和性能參數(shù)。通過機(jī)器視覺技術(shù),機(jī)器人還能對(duì)產(chǎn)品進(jìn)行外觀檢測(cè)和尺寸測(cè)量等工作。這有助于及時(shí)發(fā)現(xiàn)并解決設(shè)備故障和產(chǎn)品質(zhì)量問題,提高生產(chǎn)效率和產(chǎn)品質(zhì)量。
5. 建筑業(yè)
在建筑業(yè)中,巡線機(jī)器人扮演著重要角色,特別是在大型建筑項(xiàng)目如橋梁、隧道、高樓等的施工和維護(hù)階段。這些機(jī)器人能夠進(jìn)入人類難以到達(dá)或危險(xiǎn)的區(qū)域進(jìn)行巡檢,如檢查鋼結(jié)構(gòu)焊縫的完整性、混凝土結(jié)構(gòu)的強(qiáng)度以及防水層的完好性等。通過高精度傳感器和數(shù)據(jù)分析,它們能及時(shí)發(fā)現(xiàn)潛在的結(jié)構(gòu)問題,為工程師提供關(guān)鍵數(shù)據(jù)支持,確保建筑的安全性和耐久性。
此外,巡線機(jī)器人還能在建筑物內(nèi)部進(jìn)行巡檢,如檢查電梯井、管道井、電纜井等區(qū)域的設(shè)備狀況。這些機(jī)器人通常具備靈活的運(yùn)動(dòng)能力,能夠輕松穿越狹窄空間,并進(jìn)行詳細(xì)的視覺和物理檢查,減少了對(duì)人工巡檢的依賴,提高了巡檢效率和安全性。
6. 物流業(yè)
在物流行業(yè)中,巡線機(jī)器人被應(yīng)用于倉庫管理和貨物追蹤。它們可以在倉庫內(nèi)部自主導(dǎo)航,對(duì)貨物進(jìn)行盤點(diǎn)、分類和定位。通過掃描條形碼或RFID標(biāo)簽,機(jī)器人能夠快速準(zhǔn)確地識(shí)別貨物信息,并將其上傳至物流管理系統(tǒng)。這不僅提高了倉庫管理的自動(dòng)化水平,還減少了人為錯(cuò)誤,提高了物流效率。
此外,巡線機(jī)器人還能在運(yùn)輸過程中進(jìn)行貨物監(jiān)控,確保貨物在運(yùn)輸過程中的安全和完整。它們可以安裝在運(yùn)輸車輛上,實(shí)時(shí)檢測(cè)車輛的行駛狀態(tài)、貨物溫度、濕度等環(huán)境參數(shù),并在異常情況下及時(shí)發(fā)出警報(bào),通知相關(guān)人員進(jìn)行處理。
7. 農(nóng)業(yè)
在農(nóng)業(yè)領(lǐng)域,巡線機(jī)器人被用于農(nóng)田的巡檢和作物生長監(jiān)測(cè)。它們可以沿著預(yù)設(shè)的路線在田間地頭自主行駛,利用高清攝像頭和光譜傳感器等設(shè)備對(duì)作物進(jìn)行拍攝和分析。通過分析作物的生長狀態(tài)、葉片顏色、病蟲害情況等數(shù)據(jù),機(jī)器人能夠?yàn)檗r(nóng)民提供精準(zhǔn)的農(nóng)事建議,如灌溉、施肥、病蟲害防治等。
此外,巡線機(jī)器人還能在農(nóng)業(yè)大棚內(nèi)進(jìn)行巡檢,監(jiān)測(cè)溫室內(nèi)的溫度、濕度、光照等環(huán)境參數(shù),確保作物在最佳的生長環(huán)境下生長。這有助于提高農(nóng)作物的產(chǎn)量和品質(zhì),減少資源浪費(fèi),促進(jìn)農(nóng)業(yè)可持續(xù)發(fā)展。
8. 公共安全
在公共安全領(lǐng)域,巡線機(jī)器人發(fā)揮著不可替代的作用。它們可以被部署在重要場(chǎng)所如機(jī)場(chǎng)、火車站、地鐵站等進(jìn)行巡邏和監(jiān)控。通過搭載高清攝像頭、紅外熱成像儀等設(shè)備,機(jī)器人能夠?qū)崟r(shí)捕捉現(xiàn)場(chǎng)畫面并傳輸至監(jiān)控中心,為安全人員提供實(shí)時(shí)信息支持。
在災(zāi)難救援現(xiàn)場(chǎng),巡線機(jī)器人能夠進(jìn)入危險(xiǎn)區(qū)域進(jìn)行偵查和搜救工作。它們能夠穿越廢墟、隧道等復(fù)雜地形,利用傳感器探測(cè)生命跡象和有害物質(zhì)濃度等信息,為救援人員提供寶貴的信息支持。此外,機(jī)器人還能攜帶必要的救援物資和設(shè)備進(jìn)入災(zāi)區(qū),為被困人員提供緊急援助。
巡線機(jī)器人在多個(gè)領(lǐng)域展現(xiàn)出了廣泛的應(yīng)用前景和巨大的價(jià)值。它們通過自主導(dǎo)航、障礙物檢測(cè)、數(shù)據(jù)采集與傳輸?shù)认冗M(jìn)技術(shù)實(shí)現(xiàn)了對(duì)目標(biāo)線路的全面監(jiān)控與檢測(cè),提高了巡檢效率和安全性。隨著技術(shù)的不斷進(jìn)步和應(yīng)用場(chǎng)景的不斷拓展,巡線機(jī)器人將在更多領(lǐng)域發(fā)揮重要作用,為社會(huì)的智能化和可持續(xù)發(fā)展貢獻(xiàn)力量。未來,我們可以期待巡線機(jī)器人在技術(shù)性能、智能化水平以及與其他系統(tǒng)的集成能力方面取得更大的突破和創(chuàng)新。
四、巡線機(jī)器人電路圖
1、使用L293D的巡線機(jī)器人電路圖(1)
這里給出了簡(jiǎn)單的循線機(jī)器人電路,它是使用L293D IC 構(gòu)建的,它是一個(gè)四路高電流半 H 橋驅(qū)動(dòng)器。其設(shè)計(jì)目的是提供雙向?qū)С鲭娏鳌?/p>
通過使用該電路,您可以構(gòu)建巡線機(jī)器人,而無需任何微控制器或任何程序代碼。
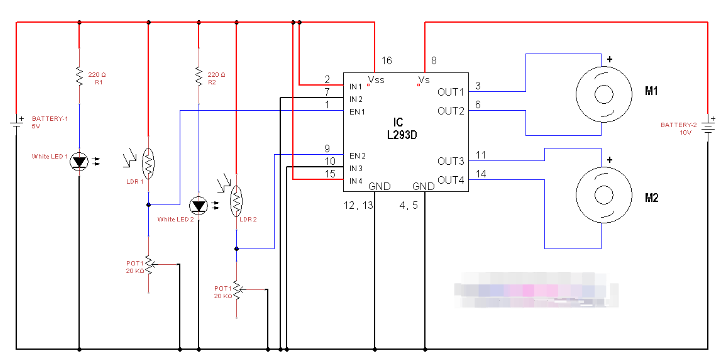
兩個(gè)電機(jī)連接為 M1 和 M2,這兩個(gè)電機(jī)將充當(dāng)左側(cè)和右側(cè)電機(jī),這些電機(jī)的旋轉(zhuǎn)由 ICL293D 使能輸入 1 和 2 控制,當(dāng)光強(qiáng)度落在上時(shí),這些電機(jī)直接與兩個(gè)LDR(光電管)連接LDR變化意味著電機(jī)(M1,M2)方向會(huì)改變,因此機(jī)器人不斷沿著線軌跡移動(dòng),使用黑色線作為軌跡。
2、使用L293D的巡線機(jī)器人電路圖(2)
如今,巡線機(jī)器人非常常見。基本上,這些機(jī)器人遵循或運(yùn)行在特定的黑色線路軌道上。在工業(yè)層面,這些機(jī)器人有很多實(shí)際應(yīng)用。例如,他們可以輕松執(zhí)行物料搬運(yùn)過程。此外,該機(jī)器人可以成為一種令人印象深刻的車輛,可以將貨物從一個(gè)地方運(yùn)輸?shù)搅硪粋€(gè)地方,從而節(jié)省時(shí)間。我們可以用不同的方式制造這種機(jī)器人。它可以通過使用微控制器和 IR 來構(gòu)建。然而,并不是每個(gè)人都理解并執(zhí)行編程。既然如此,我們就來制作這個(gè)機(jī)器人,無需編程。因此,在本教程中,我們將“使用 L293D 的巡線機(jī)器人”

對(duì)于這個(gè)項(xiàng)目,首先,您需要繪制黑線軌道。現(xiàn)在,在使用 L293D 的機(jī)器人的這條生產(chǎn)線上,我們連接了兩個(gè)名為 M1 和 M2 的電機(jī)。因此,這兩個(gè)電機(jī)分別作為左側(cè)電機(jī)和右側(cè)電機(jī)工作。 L293D IC 控制這些電機(jī)的旋轉(zhuǎn)。 IC 的使能引腳(引腳 1 和 9)與 LDR 連接。我們都知道LDR的工作原理。當(dāng)沒有光照射到其上時(shí),電流就會(huì)流過電路。換句話說,你可以說LDR電路在黑暗中工作。因此,該機(jī)器人可以輕松地跟隨黑光(黑暗)。因此,當(dāng)落在 LDR 上的光線發(fā)生變化時(shí),有線電機(jī)就會(huì)改變方向。結(jié)果,機(jī)器人連續(xù)地沿著線軌道行駛。
3、使用L293D的巡線機(jī)器人電路圖(3)
巡線機(jī)器人(通常稱為 LFR)基本上是一種智能設(shè)備,可以檢測(cè)線路并遵循地板上的路徑。該路徑通常可以是地板上可見的黑線,也可以是具有高對(duì)比度顏色的白色地板。 LFR 的基本原理是基于光在表面上的入射。
巡線機(jī)器人是最常見的,通常也是學(xué)生在學(xué)術(shù)中制作的第一個(gè)基于機(jī)器人的項(xiàng)目。巡線機(jī)器人的基本工作原理是沿著白色表面上的黑線移動(dòng)。這意味著黑線作為機(jī)器人的軌跡。在這篇文章中,我們使用 IC L293D 來驅(qū)動(dòng)兩個(gè)電機(jī)。

該機(jī)器人的基本原理是沿著黑色膠帶制成的軌道行駛。機(jī)器人在驅(qū)動(dòng)器IC L293D驅(qū)動(dòng)的電機(jī)的幫助下向前、向左、向右移動(dòng)。 LDR1和LDR2分別放置在機(jī)器人的左側(cè)和右側(cè)。白色表面反射最大的光,而黑色表面吸收最大的光。因此,當(dāng)兩個(gè) LDR 檢測(cè)到白色表面時(shí),機(jī)器人會(huì)向前移動(dòng),因?yàn)?LDR 將允許 EN1 和 EN2 引腳上的電壓通過(高強(qiáng)度光下的低電阻),從而使電機(jī)驅(qū)動(dòng)器驅(qū)動(dòng)兩個(gè)電機(jī)。當(dāng)左側(cè) LDR (LDR1) 檢測(cè)到一條黑線時(shí),其上的光強(qiáng)度非常小。
因此,其電阻變高,使 EN1 處的電壓為零,從而使左側(cè)電機(jī)停止,因此當(dāng)只有右側(cè)電機(jī)運(yùn)行時(shí),它會(huì)自動(dòng)將機(jī)器人轉(zhuǎn)向左側(cè)。當(dāng) LDR2 檢測(cè)到黑線導(dǎo)致機(jī)器人向右轉(zhuǎn)向使其沿著黑線行駛時(shí),此過程將相同。
4、使用8051微控制器的巡線機(jī)器人電路圖
巡線機(jī)器人在機(jī)器人愛好者和建造者中非常熟悉,因?yàn)閹缀趺總€(gè)人都是從這個(gè)簡(jiǎn)單的項(xiàng)目開始他們的旅程的。不要以它們的簡(jiǎn)單性來判斷,這些機(jī)器人在工業(yè)、機(jī)械等領(lǐng)域被證明非常有用。本文將指導(dǎo)您使用 8051 系列 Atmel AT89S52 微控制器構(gòu)建您的第一個(gè)巡線機(jī)器人。

該 LFR 使用兩個(gè)簡(jiǎn)單的紅外傳感器(包括一個(gè)紅外 LED 和一個(gè)光電二極管)來檢測(cè)鋪設(shè)在表面上的軌道。由于黑色是紅外光束的良好反射器,因此它會(huì)將光束反射回二極管,然后二極管對(duì)其進(jìn)行感應(yīng)。請(qǐng)注意,此 LFR 邏輯僅適用于鋪設(shè)在白色表面上的黑色軌道。
該機(jī)器人根據(jù)固定在底盤兩側(cè)的紅外傳感器發(fā)送到處理軌道性質(zhì)的控制器的反饋信號(hào)進(jìn)行工作。當(dāng)該紅外傳感器檢測(cè)到黑色時(shí),其輸出處于邏輯低 (L) 狀態(tài),反之亦然。 所以在正常情況下(白色地板)傳感器輸出很高。當(dāng)這兩個(gè)傳感器感應(yīng)到白色表面時(shí),即沒有反射時(shí),機(jī)器人就會(huì)直線行駛。但是,當(dāng)左傳感器檢測(cè)到白色且右傳感器檢測(cè)到黑色軌道時(shí),機(jī)器人右轉(zhuǎn);當(dāng)左傳感器檢測(cè)到黑色軌道且右傳感器檢測(cè)到白色時(shí),機(jī)器人左轉(zhuǎn)。
-
微控制器
+關(guān)注
關(guān)注
48文章
7552瀏覽量
151426 -
電路圖
+關(guān)注
關(guān)注
10344文章
10721瀏覽量
530641 -
機(jī)器人
+關(guān)注
關(guān)注
211文章
28418瀏覽量
207102 -
巡線機(jī)器人
+關(guān)注
關(guān)注
0文章
14瀏覽量
6430
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
經(jīng)典巡線機(jī)器人電源系統(tǒng)研究
請(qǐng)問一下怎樣去設(shè)計(jì)一種基于PID算法的巡線機(jī)器人?
怎樣設(shè)計(jì)一個(gè)能避開各種障礙物的巡線機(jī)器人嗎
基于PC104的巡線機(jī)器人控制系統(tǒng)設(shè)計(jì)
110KV輸電線路巡線機(jī)器人控制方法及實(shí)現(xiàn)
基于PC104的巡線機(jī)器人控制系統(tǒng)設(shè)計(jì)
架空電力線路巡線機(jī)器人分析探討

基于仿生原理的架空輸電線路巡線機(jī)器人越障模型
巡線機(jī)器人穩(wěn)定成像控制系統(tǒng)設(shè)計(jì)_王利華
亞太地區(qū)巡線測(cè)試機(jī)器人運(yùn)行展示視頻
設(shè)計(jì)一個(gè)巡線機(jī)器人的競(jìng)賽試題免費(fèi)下載
如何使用樹莓派制作一個(gè)巡線機(jī)器人
基于人工智能(AI)的巡線機(jī)器人






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論