") 教你DIY一架拉風(fēng)競速四軸無人機(jī)
教你DIY一架拉風(fēng)競速四軸無人機(jī)
本篇文章中,我們將手把手來教大家來制作競速四軸飛行器。下面先簡單介紹一下關(guān)于四軸飛行器的相關(guān)定義。
什么是四軸飛行器?
四軸飛行器是由具有四個臂的多轉(zhuǎn)子直升機(jī),它每個臂的端部具有一個電機(jī)和一個螺旋槳。在某些方面它與直升機(jī)類似,雖然它們的升力和推力來自4個螺旋槳,而不是僅來自單一的一個。車輛運動的控制是通過改變一個或多個轉(zhuǎn)子輪盤的音調(diào)和/或旋轉(zhuǎn)速度,從而改變其扭矩載荷和推力/升力特性來實現(xiàn)的。
什么是競速四軸飛行器?
四軸飛行器非常實用,并且有多種不同類型。舉例來說:四軸飛行器可以用來拍攝和提升相機(jī)或者內(nèi)置做半空中雜技。競速四軸飛行器則是更加快的四軸飛行器。這里的快是指它的速度極其快。競速四軸飛行器可以根據(jù)不同的規(guī)格參加相應(yīng)的比賽,目前最流行的是250尺寸大小。
競速四軸飛行器昂貴嗎?很難制造嗎?
價格視情況而定,一般一款典型的較便宜的四軸飛行器大約售價在120-200美金左右。但是,另一些昂貴的四軸飛行器可能輕而易舉的就花掉1000美金。實際上,任何有電子設(shè)計背景的人都可以自己動手DIY一個四軸飛行器。
Step 1:視頻學(xué)習(xí)
首先建議讀者多去看視頻了解關(guān)于四軸飛行器相關(guān)的各種信息。
Step 2: 你需要什么?
· 4個1806的電機(jī),
· 4個12A的電子調(diào)速器
· 一個遙控發(fā)射器和接收器
· 1個鋰電池
· 250尺寸大小的四軸飛行器構(gòu)架
· 一些導(dǎo)線
· 安裝有Clean Flight的電腦
· 各種相關(guān)的工具
可供選擇的:
?FPV攝像頭
?FPV發(fā)射機(jī)和接收機(jī)
電子發(fā)燒友《智能工業(yè)特刊》,更多優(yōu)質(zhì)內(nèi)容,馬上下載閱覽
Step 3: 整體構(gòu)架
現(xiàn)在開始制作。
首先粗略地搭建四軸飛行器的整體構(gòu)架,并將電機(jī)固定在飛行器上。
完成這些步驟后,系統(tǒng)整體架構(gòu)應(yīng)和上面最后一張圖片所展示的一樣。
Step 4: 焊接
現(xiàn)在,修剪掉多余的導(dǎo)線,通過焊接將電機(jī)連接到電調(diào)。
建議使用助焊劑粘絲,在沒有看見圖片的情況下焊接很糟糕的終止了,不得不重新啟動并再次焊接。
將電調(diào)扎帶整齊的放置在相應(yīng)的位置。
Step 5:飛行程序控制器
現(xiàn)在來給飛行控制器編程。
在Flash中使用cleanflight,并確保所有的設(shè)置都正確。很難以書面形式解釋這一處理過程,如果你還是想了解這一過程,可以去看YouTube網(wǎng)站上數(shù)以千計的視頻內(nèi)容。
Step 6: 連線
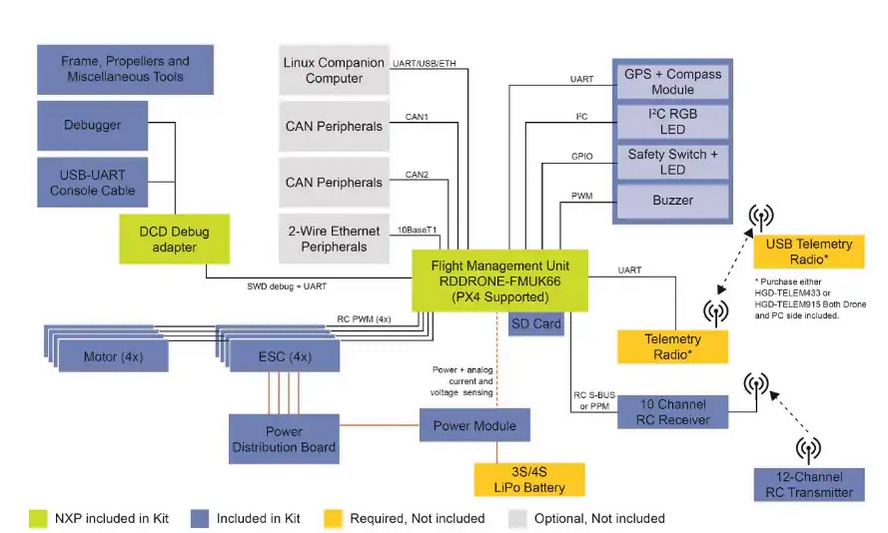
這里可能是會讓各位讀者覺得比較困惑的地方。
在這個過程中,我添加了一個忽略了LED部分的圖表(不是此物原圖)來輔助我連線。
請注意兩條導(dǎo)線已得到扭轉(zhuǎn)。這是為了將其放入空氣開關(guān)上的四軸飛行器電機(jī)方向。
Step 7: 測試與調(diào)試
現(xiàn)在來測試與調(diào)試四軸飛行器:
在 clean flight上使用各種工具, 檢查每個部件是否在正常工作。
最重要的檢查部分:
· 接收器
· 電機(jī)
· 模式設(shè)置
Step 8: 添加電池
現(xiàn)在,只要插上你的電池,讓飛行控制器自己校準(zhǔn)約一分鐘。
很多人把電池放在四軸飛行器的中間,我并不太喜歡這樣做。我更傾向?qū)⒁恍┟舾械碾娮釉旁跇?gòu)架中間以防沖撞(因為有時候在飛行過程中沖撞不可避免),我也相信這會讓它更快,但是好像至今還未實現(xiàn)。
Step 9: 制作完成
已經(jīng)完成四軸飛行器的制作,現(xiàn)在可以試飛了。
一些建議:
· 大多數(shù)變送器有馬達(dá)鎖定和解鎖
· 在空曠開放的領(lǐng)域試飛
· 使用一個lipo報警器
· 對lipo安全充電
· 試飛時請小心謹(jǐn)慎!
然后你就可以試飛你的四軸飛行器了。
-
電機(jī)控制
+關(guān)注
關(guān)注
3534文章
1879瀏覽量
268800 -
無人機(jī)
+關(guān)注
關(guān)注
230文章
10437瀏覽量
180401 -
四軸飛行器
+關(guān)注
關(guān)注
55文章
206瀏覽量
51148 -
智能硬件
+關(guān)注
關(guān)注
205文章
2347瀏覽量
107567
發(fā)布評論請先 登錄
相關(guān)推薦
國際航聯(lián)2024年世界無人機(jī)競速公開賽將在紹興柯橋舉行

DIY了一臺無人機(jī),用全志T113芯片
開源項目!DIY了一臺無人機(jī),用全志T113芯片
2024年FAI世界無人機(jī)競速錦標(biāo)賽 10月31日杭州上演競技之巔

開源項目!用ESP8266 DIY會爬墻的無人機(jī)
TATTU成為2024中國無人機(jī)競速聯(lián)賽技術(shù)服務(wù)商
NXP Semiconductors HoverGames無人機(jī)系統(tǒng)解決方案
第四集 知語云智能科技無人機(jī)反制技術(shù)與應(yīng)用--無人機(jī)的組成與工作原理
第三集 知語云智能科技無人機(jī)反制技術(shù)與應(yīng)用--無人機(jī)的應(yīng)用領(lǐng)域
第二集 知語云智能科技無人機(jī)反制技術(shù)與應(yīng)用--無人機(jī)的發(fā)展歷程
第一集 知語科技無人機(jī)反制技術(shù)與應(yīng)用--無人機(jī)的定義與分類
知語云智能科技揭秘:無人機(jī)威脅如何破解?國家安全新防線!
知語云智能科技無人機(jī)防御系統(tǒng):應(yīng)對新興威脅的先鋒力量
無人機(jī)全景監(jiān)測:空域管理的新革命
四旋翼無人機(jī)飛行原理【其利天下無人機(jī)方案開發(fā)】






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論