

Nano的創(chuàng)意始于2013年暑假,那時(shí)候它還叫“蛋黃”,當(dāng)時(shí)的想法是制作一個(gè)入門級的自平衡小車(因?yàn)橼s上學(xué)校飛思卡爾比賽,當(dāng)時(shí)報(bào)的平衡組,當(dāng)預(yù)習(xí)功課了),初步的設(shè)想是:基于Arduino制作,可以用PS2手柄遙控,能平衡能走,最好還會(huì)賣萌。
其實(shí)那也是我第一次接觸和使用Arduino,當(dāng)時(shí)少年窮…買了一塊國產(chǎn)的mini pro裸板,感覺有點(diǎn)開心,然后沒多久就被我瞎接電源給霍霍了…
最初版的蛋黃就是用mini pro做的,由于當(dāng)時(shí)還沒有3D打印機(jī)可供差遣,所以所有部件連接基本都是靠萬能的萬能膠,整體結(jié)構(gòu)十分的粗獷,怎么說呢這也許就是蒸汽朋克風(fēng)吧(并不是)。
蛋黃的資料發(fā)在論壇之后引起了不少關(guān)注,很多同學(xué)被順利地帶進(jìn)了自平衡小車的坑…一年多時(shí)間還不斷有人問我相關(guān)的問題,也正因如此,羞愧于靠著這么點(diǎn)干貨應(yīng)付大家許久,加之個(gè)人對自平衡系統(tǒng)有了更深刻的理解…于是決定改進(jìn)初代蛋黃的諸多不足,著手設(shè)計(jì)制作蛋黃的2.0版本。
對于初代的不滿情緒主要集中體現(xiàn)在外表(畢竟顏值就是戰(zhàn)斗力),速度控制(當(dāng)時(shí)幾乎沒有用上速度環(huán),只能靠不斷手動(dòng)調(diào)節(jié)平衡點(diǎn)進(jìn)行移動(dòng)),擴(kuò)展性(初代的外設(shè)太簡陋,沒有完全發(fā)揮處理器的性能),以及外表(可以看出我真的很在意…)。
最后就有了Nano啦~
——————————————————————————————————————–
好啦接下來會(huì)介紹制作一只Nano的詳細(xì)教程,其中包括一些有關(guān)自動(dòng)控制的原理和個(gè)人遇到的一些問題和經(jīng)驗(yàn)總結(jié)。另外值得說明的是,實(shí)現(xiàn)自平衡機(jī)器人的完整控制需要大量的參數(shù)調(diào)試過程,因此本教程會(huì)盡量以通俗的方式介紹原理和調(diào)試方法,但還是需要您擁有一定的電子制作基礎(chǔ)、熟悉 Arduino的使用、較強(qiáng)的動(dòng)手能力,以及堅(jiān)定的極客精神,祝成功:-)
#原理篇
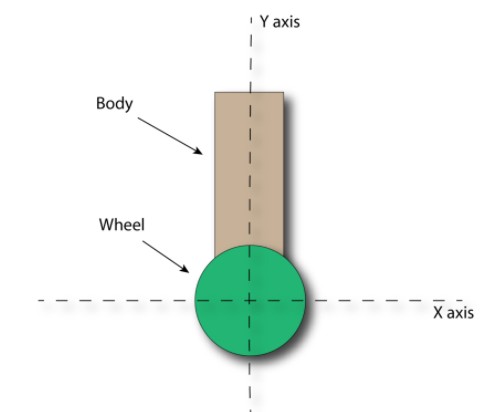
自平衡小車是一種典型的倒立擺控制模型,什么是倒立擺呢,普通的鐘擺相信大家都見過

當(dāng)物體離開垂直的平衡位置之后,便會(huì)受到重力與懸線的作用合力,驅(qū)動(dòng)重物回復(fù)平衡位置,這個(gè)力稱之為回復(fù)力,其大小為
F = ?mgsinθ
在偏移角度 θ很小的情況下, sinθ ≈ θ ,所以回復(fù)力與偏移的角度之間大小成正比關(guān)系,方向相反,在此恢復(fù)力作用下,單擺便進(jìn)行周期運(yùn)動(dòng)。
而考慮在空氣中運(yùn)動(dòng)的單擺,由于受到空氣的阻尼力, 單擺最終會(huì)停止在垂直平衡位置。空氣的阻尼力與單擺運(yùn)動(dòng)的角速度成正比,方向相反。阻尼力越大,單擺越會(huì)盡快在垂直位置穩(wěn)定下來。
現(xiàn)在來看這樣一個(gè)等效模型

我們的車模其實(shí)就相當(dāng)于一個(gè)倒立的鐘擺,可以看到,這時(shí)候重力對于物體的作用是向下的,也就是當(dāng)物體偏移了一點(diǎn)角度之后,重力作用會(huì)和偏移角度方向相同,如果車輪不運(yùn)動(dòng)的話,擺就會(huì)很快倒下。
為了解決這個(gè)問題, 使得倒立擺能夠像單擺一樣,穩(wěn)定在垂直位置,我們有兩個(gè)辦法:(1)改變重力的方向(2)增加額外的受力,使得恢復(fù)力與位移方向相反。
顯然能夠做到的只有第二種方法,為此我們根據(jù)擺的偏移角度控制車輪加減速運(yùn)動(dòng),這樣在小車的坐標(biāo)系(非慣性系)里,擺就會(huì)受到額外的慣性力作用,最終讓擺平衡起來。
再通俗一點(diǎn)說,就是當(dāng)我們發(fā)現(xiàn)小車向前倒的時(shí)候就趕緊讓它輪子加速向前,發(fā)現(xiàn)小車向后倒的時(shí)候就趕緊讓它輪子加速向后,只要這個(gè)過程做得足夠精確和快速,就能實(shí)現(xiàn)小車的自平衡。
#硬件篇
原理里面說了我們要根據(jù)小車偏移的角度來控制輪子的加減速,那么根據(jù)需求這里面需要用到的模塊就有:
Arduino主控板 — 選任何一塊你熟悉的就行,推薦nano,小巧,下載方便
陀螺儀加速度計(jì)模塊 — 用來測量傾角,推薦MPU6050,便宜,使用方便
減速電機(jī) — 尺寸自定,但最終輸出轉(zhuǎn)速為300rpm左右會(huì)比較合適,值得注意的是電機(jī)必須帶編碼器或者碼盤來測速,單相或者兩相的都可以
電機(jī)驅(qū)動(dòng) — 普通尺寸的電機(jī)推薦TB6612驅(qū)動(dòng)芯片,比L298的效率高不易發(fā)熱(平均電流1.2A左右,功率更大請選L298或其他驅(qū)動(dòng));迷你電機(jī)用L9110s模塊即可,便宜也很小巧
藍(lán)牙模塊 — 用于和手機(jī)通信,從模塊或者主從一體的都可以
按鍵 — 任何兩個(gè)腳的按鍵都可以,用來進(jìn)行一些設(shè)置
電池 — 如果是用高于5V的鋰電供電的話就可以直接使用,但如果做迷你車用3.7v的小電池供電,就需要注意得額外加一個(gè)DC升壓模塊,否則Arduino可能無法正常工作在16MHz
額外擴(kuò)展的模塊可以有:
超聲波模塊 — 可用于測距和避障,SR04比較常用,更小巧一點(diǎn)的有RCW-0001,當(dāng)然更小的還可以買收發(fā)一體的自己DIY
距離傳感器 — 夏普的一系列傳感器,比超聲模塊貴一些,但效果也更好
OLED顯示屏 — 用來顯示狀態(tài)數(shù)據(jù)當(dāng)然少不了屏幕,0.96寸的分辨率128×64效果非常好,注意最好買SPI接口的,因?yàn)?a href="http://www.xsypw.cn/tags/i2c/" target="_blank">I2C可能跟MPU6050有沖突(可能是個(gè)例,按理說地址是不沖突的,具體原因沒有深究)
蜂鳴器 — 讓小車發(fā)聲,往往比盯著一個(gè)LED看效果更好,推薦使用有源蜂鳴器
攝像頭 — 準(zhǔn)確的說是紅外光傳感器,由于Arduino的性能不足以進(jìn)行圖像處理所以無法使用一般的攝像頭
此外除一般焊接工具和手工工具外,一把熱熔膠槍會(huì)成為你DIY的得力助手。至于結(jié)構(gòu)件,有3D打印機(jī)的同學(xué)可以直接下載后面的 STL文件自行打印,沒有打印機(jī)的同學(xué)也可以到萬能的橙色網(wǎng)站找到3D打印服務(wù)店。還有一點(diǎn)需要說明的是我當(dāng)時(shí)使用的小電機(jī),是自己改裝過的,原本是一個(gè)數(shù)碼相機(jī)的變焦馬達(dá)所以非常小巧而且可以裝碼盤,改了減速比和增加出軸之后就拿來做小車了,只不過現(xiàn)在好像沒有這款賣了…
不過后來無意找到一款更合適的N20減速小電機(jī),性能比自己改裝的那款好很多,虛位和摩擦損耗都會(huì)更好,出軸也能直接接輪子,而且配備了霍爾測速,長這樣:
有意做超迷你平衡車的同學(xué)可以選用這款。TB鏈接就不發(fā)了…橙網(wǎng)搜 “N20減速電機(jī) 迷你”就能找到的
#軟件篇
軟件篇主要介紹PID算法,可以說PID是整個(gè)項(xiàng)目程序的核心,其使用的好壞決定了你的小車能不能自平衡,以及平衡得穩(wěn)定不穩(wěn)定。 PID的算法和理論分析網(wǎng)絡(luò)上有很多介紹,這里就不詳細(xì)講解了大家可以自行搜索。基于數(shù)學(xué)模型的介紹有點(diǎn)不好理解,本文從控制學(xué)的角度簡單講解一下PID 及其使用方法。
所謂PID就是比例-積分-微分的英文縮寫,但并不是必須同時(shí)具備這三種算法,也可以是PD,PI,甚至只有P算法控制,下面分別介紹每個(gè)參數(shù)的含義:
首先需要明確一個(gè)事實(shí)就是,要實(shí)現(xiàn)PID算法,必須在硬件上具有閉環(huán)控制,就是得有反饋。比如控制一個(gè)電機(jī)的轉(zhuǎn)速,就得有一個(gè)測量轉(zhuǎn)速的傳感器,并將結(jié)果反饋到控制器中,而在自平衡系統(tǒng)中,常用的有三個(gè)控制環(huán) — 角度環(huán)、速度環(huán)、轉(zhuǎn)向環(huán)
大家可以想象出每個(gè)閉環(huán)的反饋元件分別是什么嗎,對就是上面元件清單里面包含的 IMU(陀螺儀+加速度計(jì))、編碼器、攝像頭(或者其他可以確定方位的元件比如陀螺儀,磁場計(jì)等)
P(比例):以小車巡線為例,現(xiàn)在需要讓小車跟隨一條軌跡前進(jìn),用PID算法控制方向環(huán),反饋傳感器就假設(shè)為攝像頭。那么小車行進(jìn)中有這么幾種情況:
1.車通過攝像頭發(fā)現(xiàn)自己處在軌跡的左邊,位置誤差值為正,那么就需要向右轉(zhuǎn)向,轉(zhuǎn)向值為正
2.車通過攝像頭發(fā)現(xiàn)自己處在軌跡的右邊,位置誤差值為負(fù),那么就需要向右轉(zhuǎn)向,轉(zhuǎn)向值為負(fù)
3.車通過攝像頭發(fā)現(xiàn)自己處在軌跡的正中間,位置誤差值為0,很歡快地筆直前行,轉(zhuǎn)向值為0
于是我們發(fā)現(xiàn),小車轉(zhuǎn)向值的輸出可以簡單地通過把位置誤差乘以一個(gè)系數(shù)就得到了,而且顯然,誤差越大,得到的轉(zhuǎn)向值也越大,符合需求。這里面這個(gè)系數(shù),就是P了,而系數(shù)具體的大小,需要根據(jù)實(shí)際情況調(diào)試確定。
我們有了第一個(gè)公式:P_term = kP * error
D(微分):還是以小車巡線為例,依然是那車那線那比例。那么小車行進(jìn)中有這么幾種情況:
在P參數(shù)的作用下
1.小車從左邊向中間逐漸靠攏,終于它到達(dá)了中點(diǎn)……然而,由于慣性,它根本停不下來!于是小車又到了線的右邊
2.小車從右邊向中間逐漸靠攏,終于它到達(dá)了中點(diǎn)……然而,由于慣性,它根本停不下來!于是小車又到了線的左邊
…
這跟說好的不一樣!于是這個(gè)時(shí)候D出場了,想想我們期待的效果是啥,我們希望小車到達(dá)中點(diǎn),此時(shí)不光位置誤差為0,還要轉(zhuǎn)向速度誤差也為0。
那么我們設(shè)定期望的轉(zhuǎn)向速度為0,此時(shí)如果小車轉(zhuǎn)向速度向右的話誤差為+,向左為-
再看前面的情況1,小車的轉(zhuǎn)向速度誤差為+,我們應(yīng)該在P之外再給它一個(gè)向左的轉(zhuǎn)向力,才能保證它在到達(dá)中點(diǎn)時(shí)速度不會(huì)那么快;情況2類似,此時(shí)需要向右的轉(zhuǎn)向力
也就是說,D相當(dāng)于給了小車一個(gè)轉(zhuǎn)向的阻力,而這個(gè)力,又恰好可以通過簡單地把轉(zhuǎn)向速度誤差乘以一個(gè)系數(shù)得到,顯然,轉(zhuǎn)向速度誤差越大,得到的阻力越大,符合需求(值得注意的是這里的轉(zhuǎn)向速度是相對中點(diǎn)的,并不是指小車輸出的轉(zhuǎn)向速度,可以理解為“位置變化的速度”)
我們有了第二個(gè)公式:D_term = kD* (error- last_error)
如果上面的例子還是不好理解的話,考慮前面的單擺模型:P相當(dāng)于重力的作用,讓擺左右往復(fù)運(yùn)動(dòng),而D則相當(dāng)于空氣阻力,讓擺慢慢停在中點(diǎn)。D的大小很理想的情況下,應(yīng)該是大概擺動(dòng)左右各一下之后就停在中點(diǎn),想象把擺放在水中擺動(dòng)的情況。
I(積分)
有的時(shí)候我們會(huì)發(fā)現(xiàn),系統(tǒng)中存在一些固定的阻力,例如,我們用PID控制一個(gè)電機(jī)的轉(zhuǎn)速,當(dāng)給定的目標(biāo)速度很小的時(shí)候,就會(huì)出現(xiàn)這樣的情況:
根據(jù)P_term = kP * error,由于error很小,P的輸出也很小,而由于摩擦力的存在,此時(shí)并不能讓電機(jī)轉(zhuǎn)動(dòng)起來;又由D_term = kD* (error- last_error),由于電機(jī)沒有轉(zhuǎn)動(dòng),顯然(error- last_error)始終為0于是D輸出也為0,那么問題來了,除非改變目標(biāo)值,否則電機(jī)就永遠(yuǎn)轉(zhuǎn)不起來了…
I的作用就是消除這樣的靜態(tài)誤差,它會(huì)將每次的誤差都積累起來,然后同樣也是乘以一個(gè)系數(shù)之后作為輸出。比如上面的情況,雖然誤差很小,但卻不是0,于是在每一輪的計(jì)算中,I項(xiàng)把error逐漸累積,直到超過臨界值讓電機(jī)轉(zhuǎn)起來;而在誤差為0的情況下,I項(xiàng)卻又不會(huì)幫倒忙。
第三個(gè)公式:I_term = kI*(I_term + error)
以上就是PID的全部計(jì)算了,最后三者加起來就得到了:
PID_output = P_term + I_term + D_term
每隔一段固定時(shí)間把它運(yùn)行一遍,就是PID算法了
可以看出,PID的算法實(shí)現(xiàn)其實(shí)非常簡單,不過只有幾行代碼而已,所以非常建議自己實(shí)現(xiàn)一遍PID代碼。Arduino平臺上也是有PID庫的,但庫的名字叫什么我不告訴你,自己去找哦。
#制造篇
如果上面的都可以理解的話就可以開始動(dòng)手制作啦,這里會(huì)以Nano的制作過程為例,但是大家可以根據(jù)實(shí)際情況自行調(diào)整。
網(wǎng)盤老是鏈接失效,所有文件(源代碼+STL模型文件+APP)都發(fā)在與非電路城上(收1元當(dāng)請我吃辣條了…)
價(jià)格可能還在審核,需要下載的可以晚一點(diǎn)再去
對里面文件說明一下:
STL文件是Nano頭部和身體的結(jié)構(gòu)件,底座由于大家使用電機(jī)不同需要自己確定,按照自己買到的電機(jī)的情況制作一個(gè)帶兩個(gè)電機(jī)的底座就行,有熱熔膠槍的幫助應(yīng)該挺簡單的
源碼建議用1.6.5版本的IDE編譯,舊版本的庫文件有些區(qū)別
先看看原理圖(點(diǎn)擊可以打開大圖)
需要說明的是圖里面的電源線是沒有連接的(一正一負(fù)大家都知道),另外IO大家可自己調(diào)換,只要在程序里改一下宏定義就行;另外編碼器分為單相和AB相的,我這里用的是單相,只能測轉(zhuǎn)速不能測方向,所以其實(shí)方向的檢測是通過給電機(jī)的PWM方向近似模擬的,有條件的話還是用雙向的更好。單相編碼器的話直接把信號線接到D2,D3腳,分別屬于中斷0和中斷1;AB相的話則是一根線接到D2或D3另一根線接到一個(gè)普通IO用來判斷方向(這時(shí)候需要修改程序最后的ENCODER_L()和ENCODER_R()函數(shù)內(nèi)容)。
然后就開始按圖連接模塊到外殼里
文件打印好之后按原理圖組合,頭部里面裝了超聲波,Arduino nano板(不帶排針),藍(lán)牙模塊,兩個(gè)LED,攝像頭以及蜂鳴器,注意把所有的IO都用導(dǎo)線引出到脖子部位
正面的樣子
頭部模塊都塞完之后先別急著粘合,之后還有身體的導(dǎo)線要連接到主控板,里面的部件可以先用熱熔膠固定一下。對了導(dǎo)線選擇的話如果技術(shù)好可以用漆包線最省空間,沒有把握的話就用這種FC排線,比較軟去皮容易,比較細(xì)而且是整排一起的會(huì)美觀一些,杜邦線真的很不好用…
身體部分主要放舵機(jī)(如果要用的話),OLED,電機(jī)驅(qū)動(dòng)板及升壓板,OLED塞的時(shí)候注意不要用蠻力不然屏幕玻璃易碎(不要問我怎么知道的…)
如果上面裝頭部的時(shí)候有把導(dǎo)線引出這時(shí)就可以焊在屏幕上了
MPU6050在底部,也用502或者熱熔膠固定
然后是舵機(jī),舵機(jī)用的是最常見的9g舵機(jī),雖然也有更小的但是怕力矩不夠,可以看到由舵機(jī)擺臂推動(dòng)脖子的連接桿就可以讓頭部運(yùn)動(dòng)了。舵機(jī)不是很建議采用,一個(gè)是小機(jī)器人的電池功率比較小,舵機(jī)在堵轉(zhuǎn)的時(shí)候容易造成死機(jī),另一個(gè)頭部重量還是相對比較大,所以運(yùn)動(dòng)的時(shí)候重心變化容易干擾平衡,參數(shù)設(shè)置會(huì)更復(fù)雜
然后是裝身體部分側(cè)面,先把升壓板用熱熔膠固定在一邊,然后蓋上蓋板用502粘合(紅色圈住的是一塊DC-DC升壓板)
這時(shí)候主體就已經(jīng)快完成啦
這時(shí)可以開始制作電機(jī)底座了,一個(gè)參考方案是,用一張廢棄的電話卡或者銀行卡剪裁一下作為基板,然后把兩個(gè)電機(jī)用熱熔膠固定在基板上,這樣基板就可以用膠和身體粘合起來了
現(xiàn)在可以裝電機(jī)驅(qū)動(dòng)了,我用的是L9110S,直接蓋在身體背面
裝上背蓋整個(gè)身體部分就完成啦
最后是電池包,找塊輕薄一點(diǎn)的電池直接粘在背部就行,也可以加上電池蓋
側(cè)面的樣子
小Nano完成了!
當(dāng)然現(xiàn)在它還不會(huì)動(dòng),這時(shí)候還是先別急著把頭部粘合,先寫幾個(gè)小程序逐個(gè)測試一下每個(gè)模塊的工作狀態(tài),比如超聲波是否工作,6050有沒有數(shù)據(jù),這些程序直接去各個(gè)庫里面找到例程改一下定義的引腳運(yùn)行看效果就行。
當(dāng)確定沒有問題之后,用熱熔膠仔細(xì)地固定好每個(gè)部位,準(zhǔn)備開始程序調(diào)試工作了。
打開源程序文件夾里任意一個(gè)文件,就可以看到整個(gè)工程代碼
首先需要修改的是引腳定義,把引腳改成你實(shí)際連接的情況
/*********************引腳定義*********************/
#define LFT 0
#define RHT 1
#define BUZZER 4 //蜂鳴器
#define BUTTON 5 //按鈕
#define LED 11 //臉頰LED
//#define SERVO 13 //舵機(jī),小機(jī)器人不推薦使用,電流易過載
#define TRIG_PIN 8 //超聲波模塊觸發(fā)腳
#define ECHO_PIN 7 //超聲波模塊接收腳
然后再最上面的調(diào)試選項(xiàng)中,取消IMU_OUTPUT的注釋,像這樣

下載程序到主控里,打開串口監(jiān)視器,按一下按鍵,就可以看到輸出的角度數(shù)據(jù)了。
如果數(shù)據(jù)不正常的話需要檢查前面哪里出問題了,這一步是為了獲取機(jī)器人平衡的自然角度:手動(dòng)把機(jī)器人放正,就是大概在自然重心的平衡角度,讀取串口的角度數(shù)據(jù),記錄下這個(gè)值就是angle_setpoint的值了,把66行的 angle_setpoint = 0改成你得到的值。
下一步把IMU_OUTPUT重新注釋掉,開啟MOTOR_ENABLE的注釋,然后用 Motor(char LR, int SPEED)這個(gè)函數(shù)放在setup()的最后面來檢測電機(jī)的正負(fù)極是否正確,也就是當(dāng)給Motor(LFT,100)時(shí)左輪正轉(zhuǎn),Motor(LFT,-100)時(shí)左輪反轉(zhuǎn),Motor(RHT,100)時(shí)右輪正轉(zhuǎn),Motor(RHT,-100)時(shí)右輪反轉(zhuǎn)。
上一步也檢測成功之后,就可以開始調(diào)節(jié)角度環(huán)的PID參數(shù)了
說明一下這里用宏定義了一遍參數(shù)的原因是,如果用的mega328p的芯片的話由于整個(gè)程序代碼量還是挺大的所以會(huì)提示動(dòng)態(tài)內(nèi)存緊張,所以在調(diào)試完參數(shù)之后就把它們用宏固化了節(jié)省SRAM
總體的參數(shù)整定原則是:
先P后D,如果電機(jī)響應(yīng)慢(比如減速級很多的電機(jī)),再調(diào)I,如果PD效果足夠好的話則不需要I
單一變量法,即調(diào)整一個(gè)參數(shù)的時(shí)候其他參數(shù)都固定不變
先定量級再定數(shù)值,比如調(diào)整P的時(shí)候,先從0.0001開始,查看小車反應(yīng),沒有效果的話改為0.001,以此類推,直到確定一個(gè)合適的數(shù)量級,然后才開始在這個(gè)數(shù)量級里微調(diào),這樣其實(shí)就已經(jīng)把調(diào)整的范圍縮小到很小了
先超調(diào)再減小,即所有參數(shù)都先盡量加大,直到系統(tǒng)震蕩,然后再取這個(gè)值的小一點(diǎn)的值作為最合適參數(shù)
調(diào)試過程中盡量讓車處于自然狀態(tài)沒有額外的力作用,即盡量用無線調(diào)試,有線的話找根軟一些的線
好那么調(diào)節(jié)過程中小車什么表現(xiàn)才算是“好”呢?
在角度環(huán)中,當(dāng)P逐漸增大,小車會(huì)開始有恢復(fù)力作用,也就是當(dāng)手扶著往前倒的時(shí)候小車也能大概跟著往前走,但是還是走的很“軟”,再逐漸增大參數(shù),恢復(fù)力越來越大,直到大到一定程度,小車開始前后自主劇烈抖動(dòng),電機(jī)性能好一點(diǎn)的小車即使手不扶著也能大概站立了。
稍微減小剛剛震蕩的參數(shù),作為P值固定在程序里,開始調(diào)節(jié)D值,依然是確定量級之后逐漸增大,在增大的過程中會(huì)發(fā)現(xiàn)小車的震蕩頻率逐漸降低了,增大到一定程度小車基本不再震蕩,這個(gè)值就是需要的D值了
也會(huì)有一部分情況下由于電機(jī)性能原因上面PD的調(diào)整過程中始終無法達(dá)到很好的效果,那么此時(shí)需要加入I,在調(diào)完P(guān)值之后,D值置0,增加 I值,直到小車的恢復(fù)力變得比較“硬”,然后稍微減小P值,直到出現(xiàn)比較理想的直立效果;最后再加D,視效果增加到震蕩為止,再減小到70%左右,這樣角度環(huán)PID所有參數(shù)就整定完成了。
角度環(huán)調(diào)好了,小車可以穩(wěn)定平衡了,可是為啥它一直往一邊跑呢?
因?yàn)榻嵌拳h(huán)的任務(wù)就是維持小車的角度,除此之外就是它能力范圍之外了,角度環(huán)是不關(guān)心小車是靜止著平衡的,還是邊跑邊平衡的 — 如果恰好目標(biāo)平衡點(diǎn)和小車重心平衡點(diǎn)重合,那么小車可以大概靜止,而如果不是,那小車就會(huì)在平衡中不斷加速,直到輪子的速度超出了電機(jī)所能提供的轉(zhuǎn)速,于是小車還是會(huì)倒下。
所以我們需要添加一個(gè)速度環(huán),用編碼器測量速度來作為反饋
在速度環(huán)中,首先確定編碼器獲取的數(shù)值是正確的,在程序中分別是count_L和count_R儲存計(jì)數(shù),打印輸出一下轉(zhuǎn)動(dòng)輪子看數(shù)據(jù)對不對,正確的話,在調(diào)節(jié)好角度環(huán)的基礎(chǔ)上,就可以添加速度環(huán)了。
在調(diào)試選項(xiàng)中取消SPEED_LOOP的注釋,然后這次我們不需要D,速度環(huán)單純靠PI調(diào)節(jié),而且先調(diào) I再調(diào)P,對應(yīng)的表現(xiàn)如下:
先給一個(gè)比較小的P值(因?yàn)镮是P的累加,如果P為0的話I也就沒有意義了),隨著I值逐漸增大,用手輕推小車,小車會(huì)前進(jìn)之后慢慢后退,就說明參數(shù)起作用了。此時(shí)你可以決定到底給一個(gè)更大的 I值還是小的 I值,越大的 I 值對應(yīng)了更快的恢復(fù)速度,在偏離之后會(huì)更劇烈地后退,在更短的距離內(nèi)回到原點(diǎn),但是當(dāng)然這樣也會(huì)降低小車的穩(wěn)定性,而小的參數(shù)則于此相反,需要在前進(jìn)更長的距離之后才會(huì)慢慢回到原點(diǎn),但是也使得抗干擾能力增強(qiáng),也就是不會(huì)被輕易推倒。
只用 I 值的話小車的回復(fù)會(huì)是往復(fù)的,逐漸逼近原點(diǎn),加上P值則可以消除這種來回震蕩,與角度環(huán)調(diào)節(jié)D值的過程一樣,逐漸增加直到推了之后可以在前后各擺動(dòng)一次就回復(fù)到原點(diǎn)靜止,此時(shí)這個(gè)P值便是對應(yīng)于那個(gè) I值的最合適參數(shù)。
這里有個(gè)我之前做的一個(gè)大車的抗干擾視頻,該車的電機(jī)性能非常暴力,因此可以看到其平衡性能非常好
PID參數(shù)的調(diào)整過程大概如此,總之這是一項(xiàng)既需要細(xì)心調(diào)整,但自由度也很大的工作,所謂“大膽假設(shè),小心求證”,在多嘗試幾種參數(shù)組合之后,你會(huì)找到適合你的小車的magic point的~
關(guān)于參數(shù)的調(diào)整本來還有很多可以說,比如調(diào)整的形式上,大家可以在小車上加上幾個(gè)電位器用analogRead讀取后作為參數(shù)值,這樣就可以方便而直觀地觀察到參數(shù)連續(xù)變化帶來的影響;又比如無線調(diào)試的話使用SSH終端的串口協(xié)議方式控制會(huì)比使用串口助手方便很多等等。但我想對于參數(shù)理解最有效的方式還是親手去操作,多嘗試多對比,這里也有一個(gè)更詳細(xì)的參數(shù)整定視頻教程,非常推薦大家繼續(xù)觀看,方向環(huán)的調(diào)試這里面也有詳細(xì)介紹:
-
nano
+關(guān)注
關(guān)注
1文章
158瀏覽量
30865 -
Arduino
+關(guān)注
關(guān)注
188文章
6481瀏覽量
189135 -
平衡機(jī)器人
+關(guān)注
關(guān)注
0文章
8瀏覽量
8069 -
MCU6050
+關(guān)注
關(guān)注
1文章
197瀏覽量
3988
發(fā)布評論請先 登錄
相關(guān)推薦
轉(zhuǎn):NANO—東半球最小的自平衡機(jī)器人(硬件+源碼+3D文件)
關(guān)于兩輪自平衡機(jī)器人載重問題
制作一個(gè)迷你平衡機(jī)器人
基于使用A4988驅(qū)動(dòng)程序和HC-05 bt模塊構(gòu)建自平衡機(jī)器人
基于JJBoover的遠(yuǎn)程控制ARDUNO自平衡機(jī)器人資料下載
如何制作WiFi控制的自平衡機(jī)器人

使用TensorFlow對自平衡機(jī)器人進(jìn)行手勢控制
Magicbit的自平衡機(jī)器人
基于Arduino UNO的自平衡機(jī)器人
使用Arduino的自平衡機(jī)器人
二輪自平衡機(jī)器人開源設(shè)計(jì)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論