") 先楫HPM5300驅(qū)動(dòng)設(shè)計(jì),交錯(cuò)式buck-boost
先楫HPM5300驅(qū)動(dòng)設(shè)計(jì),交錯(cuò)式buck-boost
IT王工 先楫資深 FAE
有著10年AE/FAE工作經(jīng)驗(yàn),既是一個(gè)喜歡與客戶交流探討的人,也是一個(gè)內(nèi)向愛好專研技術(shù)的人。
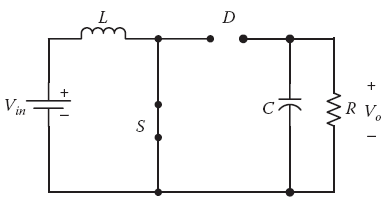
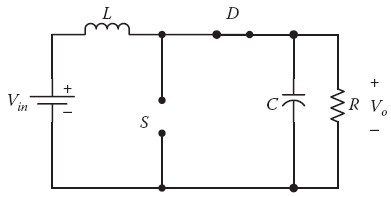
Buck-Boost簡介
Buck-boost是一種非隔離變換器,可以將電源的電壓轉(zhuǎn)換為較高或較低的電壓輸出。它采用開關(guān)控制原理,通過周期性地切換電感和電容的連接方式,改變電感儲(chǔ)能和釋放能量的時(shí)間比例來實(shí)現(xiàn)電壓升降。
Buck-boost優(yōu)點(diǎn):
● 可逆性好,控制簡單。
● 轉(zhuǎn)換效率高。
● 控制精度高,輸出穩(wěn)定性好。
● 電路驅(qū)動(dòng)成本低。
Buck-boost應(yīng)用
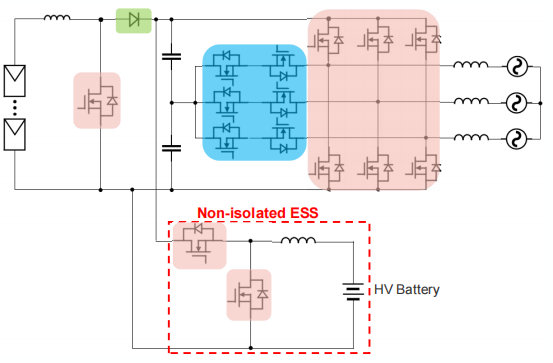
● 非隔離式的電池充放電,例如儲(chǔ)能型微逆、分布式光伏(如下圖)。
● 低壓的高效非隔離升壓或降壓電路。
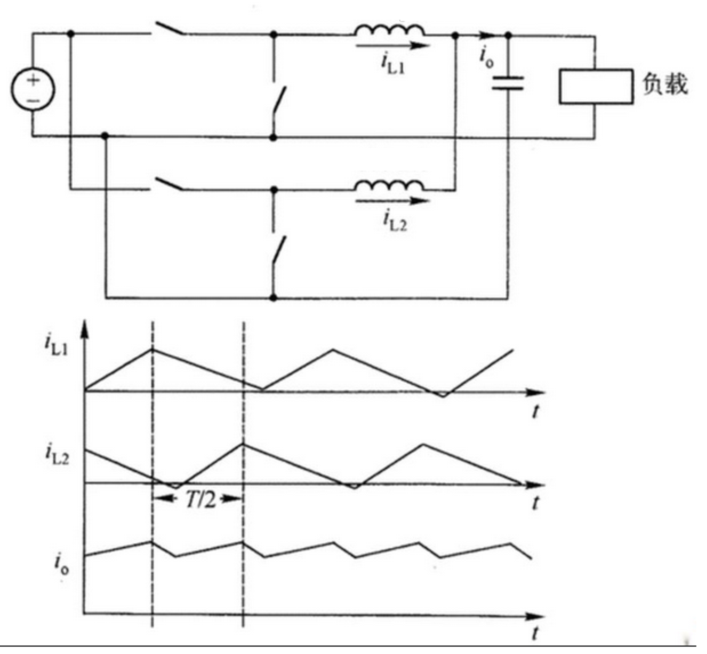
● 為降低電源紋波,多選用多路交錯(cuò)式結(jié)構(gòu)。
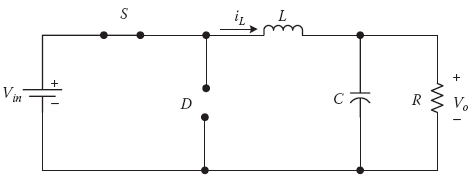
Buck工作模式
當(dāng)直流母線側(cè)給電池充電時(shí)降壓輸出,工作在buck模式。
根據(jù)流過電感L的電流情況(連續(xù)或斷續(xù)),Buck變換器常規(guī)三種工作模式:
● CCM(Continuous Coduction Mode)
● DCM(Discontinuous Conducton Mode)
● BCM(Boundary Conducton Mode)
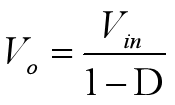
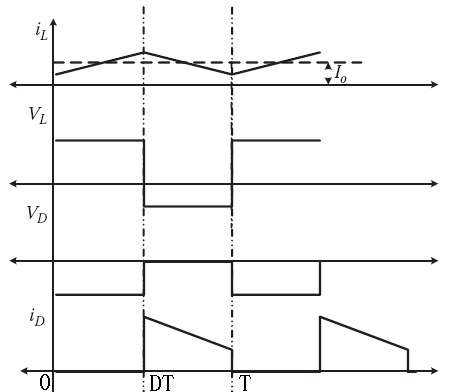
數(shù)字電源中主要以CCM為主,本應(yīng)用重點(diǎn)講述CCM控制實(shí)現(xiàn)。輸出電壓:
這里D為PWM占空比。
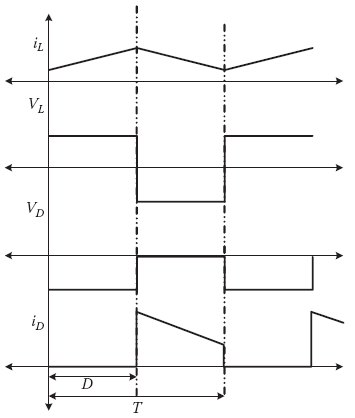
( Buck變換器CCM工作波形)
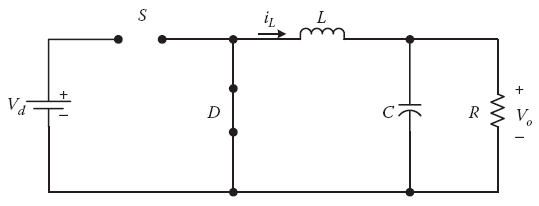
當(dāng)電池向直流母線放電時(shí)升壓輸出,工作在boost模式。
數(shù)字電源中主要以CCM為主,本應(yīng)用重點(diǎn)講述CCM控制實(shí)現(xiàn)。輸出電壓:
這里D為PWM占空比。
( Boost變換器CCM工作波形 )
交錯(cuò)式Buck-Boost工作特點(diǎn)
交錯(cuò)式buck-boost電路是一種多路并聯(lián)的升降壓轉(zhuǎn)換器,利用多個(gè)相同的電路模塊,通過交錯(cuò)控制方式實(shí)現(xiàn)高效率、低紋波、大功率輸出的升降壓轉(zhuǎn)換。本應(yīng)用選用了兩相交錯(cuò)模式,相位角為180°。
Buck-Boost應(yīng)用要求
●buck和boost工作模式的主功率管可以通過軟件切換,對應(yīng)死區(qū)控制也根據(jù)工作模式切換。
● 為了提高效率,buck-boost電路中續(xù)流功率管在續(xù)流狀態(tài)時(shí),需要打開功率管;同時(shí)在續(xù)流電路減小至零點(diǎn)前需要關(guān)閉功率管,防止電流反向。
● 由硬件完成監(jiān)控續(xù)流電流并實(shí)現(xiàn)續(xù)流功率管快速關(guān)閉。
● PWM中有效輸出狀態(tài)有跨越PWM周期的情況,針對該應(yīng)用,PWM輸出應(yīng)不受計(jì)數(shù)器重載影響。
● 選用PWM中心對齊模式,優(yōu)化EMC和電路采樣精度。
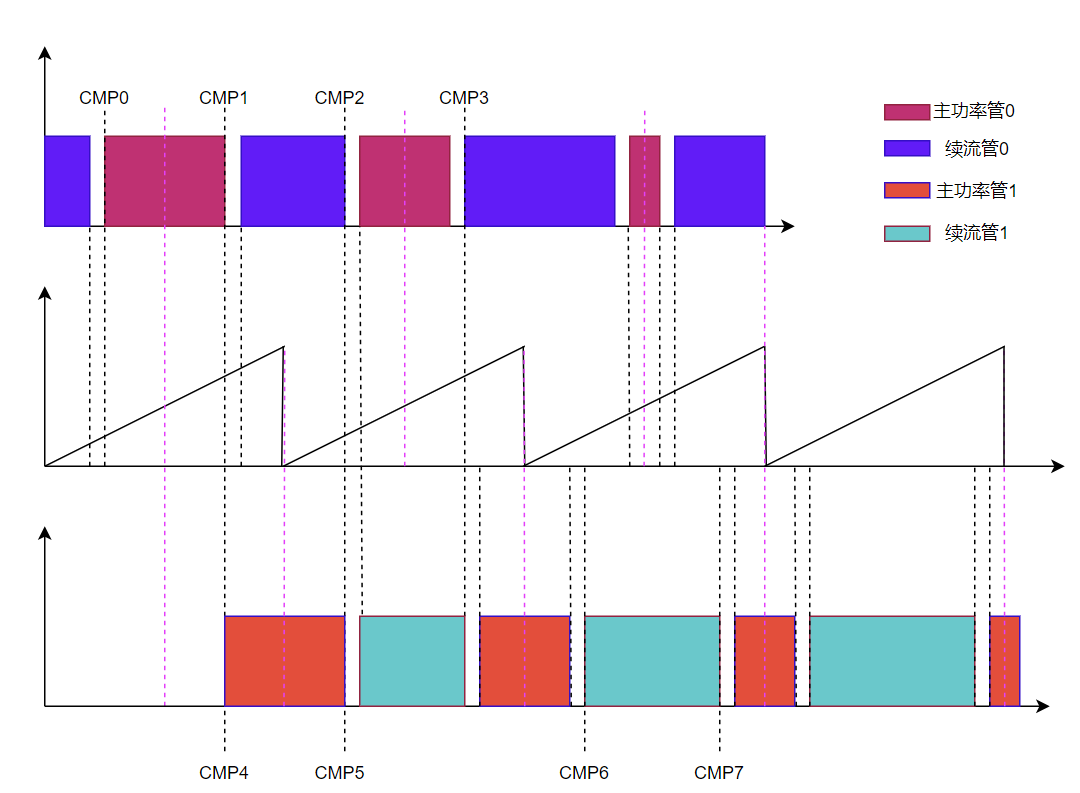
PWM輸出波形
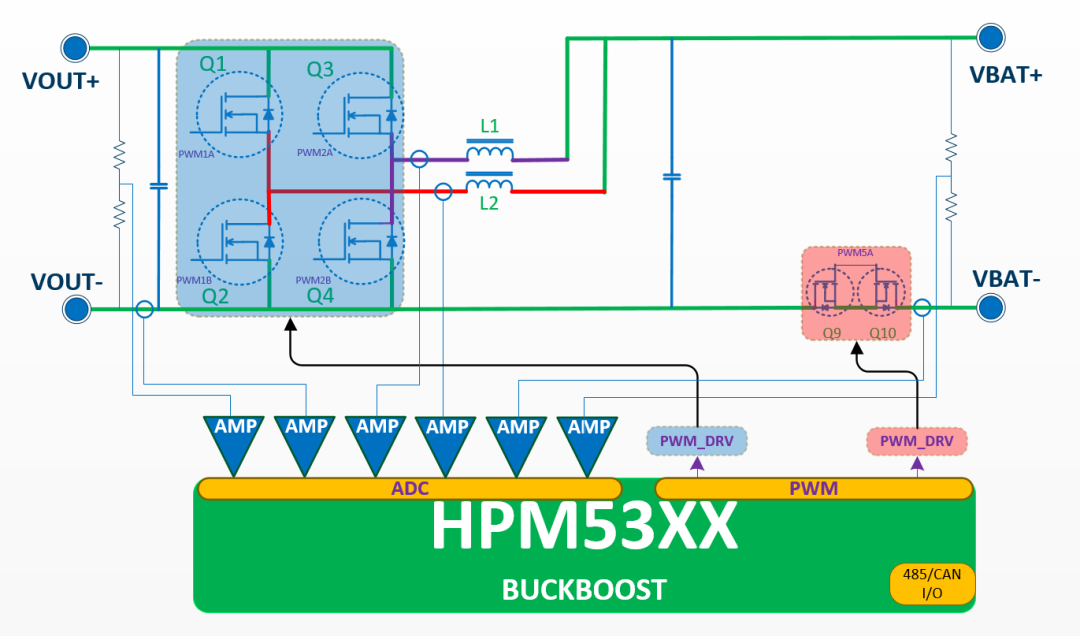
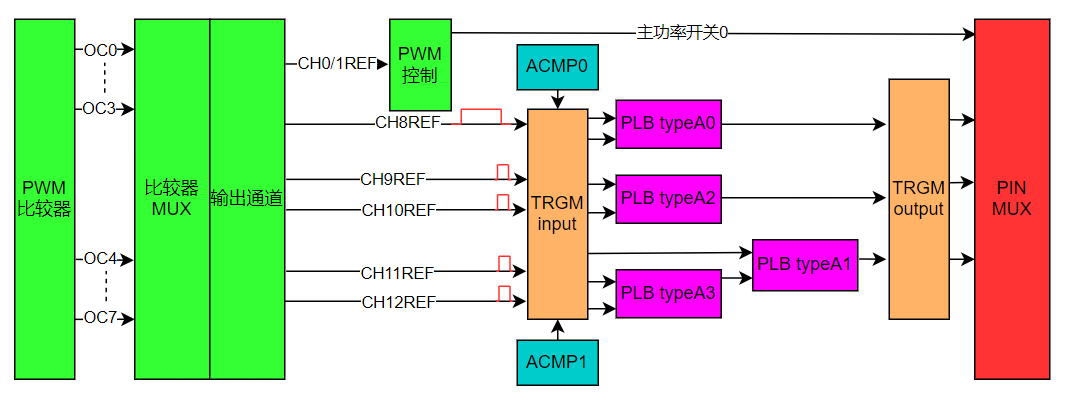
Buck-boost配置框圖
整個(gè)驅(qū)動(dòng)中用到了PWM、TRGM、ACMP、PLB等功能模塊。
外設(shè)配置
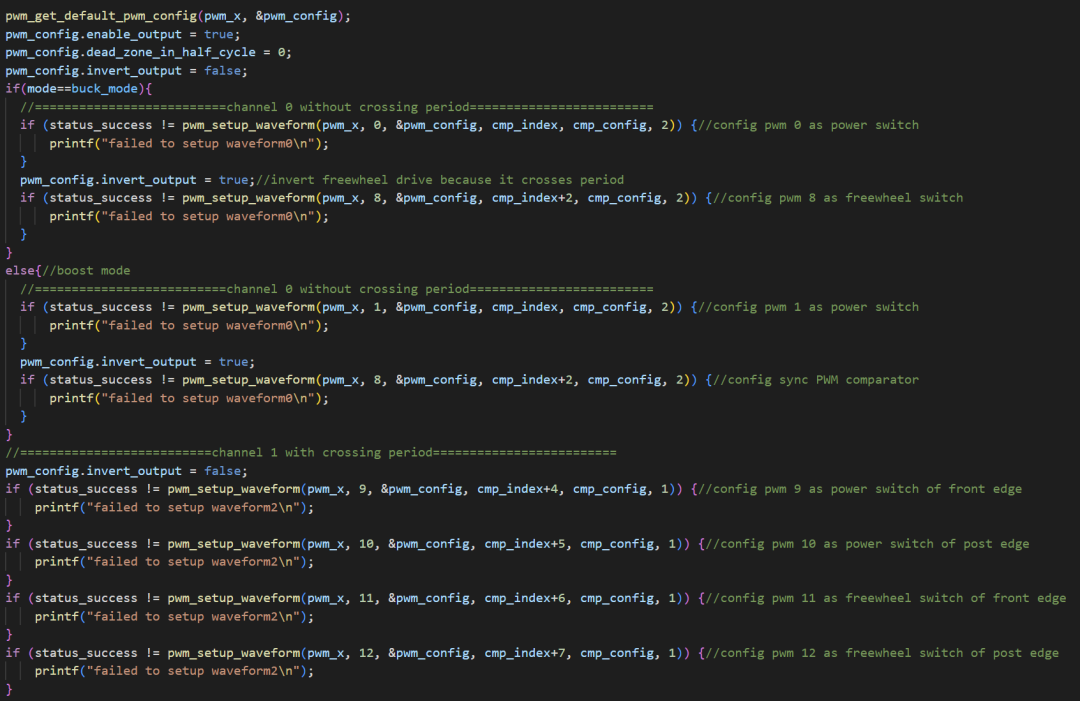
PWM配置
●兩路PWM選擇中心對齊模式,其中通道0的中心點(diǎn)為周期/2,通道1的中心點(diǎn)為周期結(jié)束點(diǎn)。
●通道0的主功率管和續(xù)流功率管由兩個(gè)PWM輸出分別控制。
● buck和boost模式不同,通道0中的主功率開關(guān)對應(yīng)PWM直接輸出通道根據(jù)模式可以在PWM0和PWM1直接切換,PWM工作模式為中心對齊模式。
●通道0中的續(xù)流功率管通過PWM8輸出互聯(lián)管理器,在PLB中與ACMP組合產(chǎn)生最終PWM信號。
●通道1的PWM輸出有跨越周期問題,PWM工作模式為邊沿輸出,由PWM9-PWM12輸出至PLB后,根據(jù)信號重構(gòu)PWM。
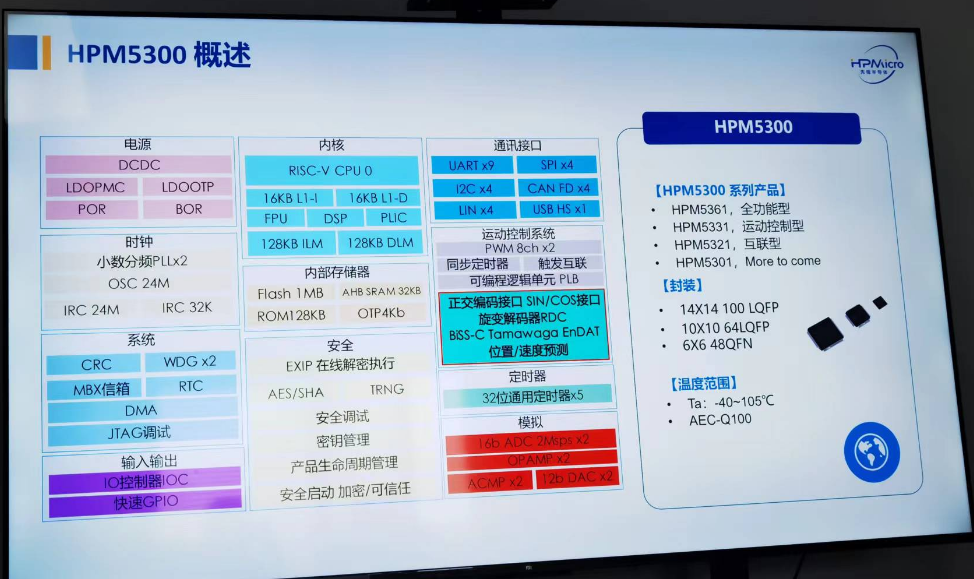
● HPM5300包含2個(gè)模擬比較器。ACMP可以對兩個(gè)模擬電壓輸入 (同相端INP) 和反相端 (INN) 進(jìn)行比較,并輸出比較結(jié)果。
● ACMP支持內(nèi)部8位數(shù)字模擬轉(zhuǎn)換器DAC,支持外部模擬信號與內(nèi)部 DAC 生成的參考信號進(jìn)行比較。
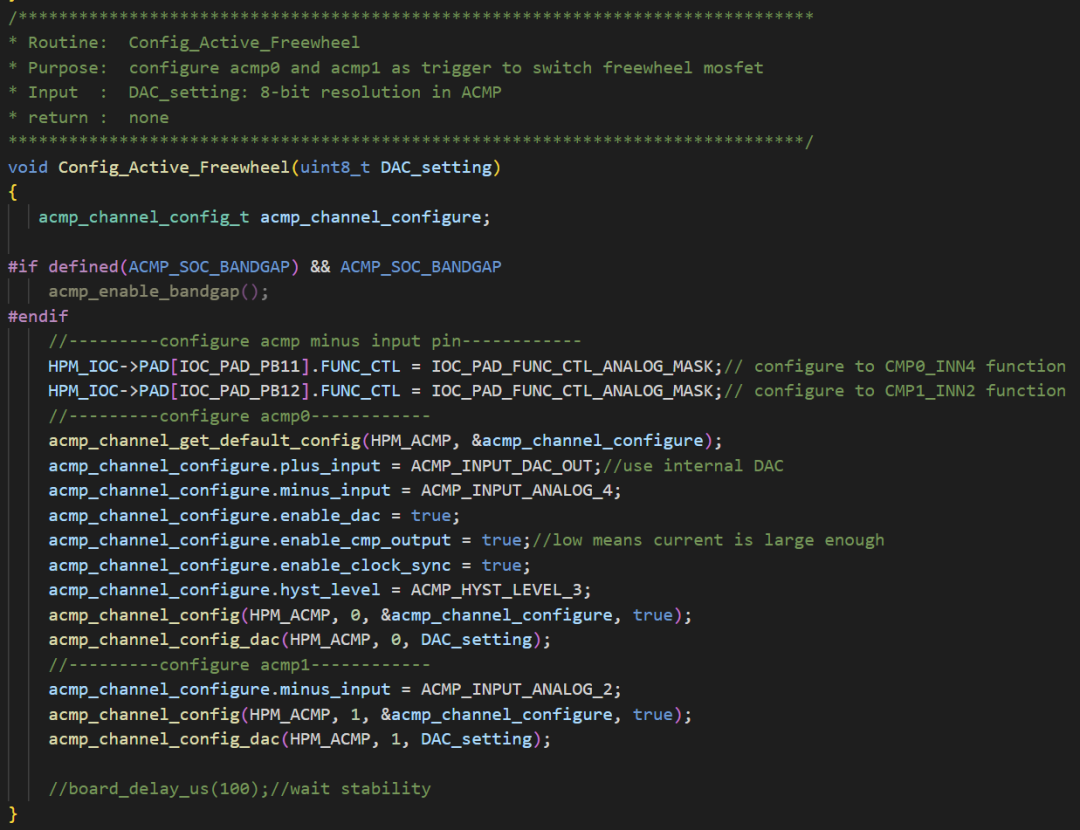
ACMP配置
● ACMP是用于偵測兩通道buck-boost輸出電流大小。
●反饋電流信號輸入作為反相端輸入,內(nèi)置DAC作為同相端輸入。當(dāng)反饋電流信號過小時(shí),ACMP輸出高電平,關(guān)閉續(xù)流功率管的PWM信號。
●考慮到開關(guān)時(shí)干擾,ACMP的回差都設(shè)置為最高。
互聯(lián)管理器TRGM
●互聯(lián)管理器TRGM支持電機(jī)控制單元內(nèi)外各個(gè)設(shè)備的信號間互通互聯(lián),可以把片上各個(gè)外設(shè)整合起來,實(shí)現(xiàn)外設(shè)間相互同步,相互配合。
●互聯(lián)管理器支持多個(gè)輸入,輸入來自于IO,電機(jī)控制單元內(nèi)外的各個(gè)外設(shè)。
●互聯(lián)管理器支持管理電機(jī)控制單元內(nèi)外設(shè)的DMA請求、位置輸入切換等。
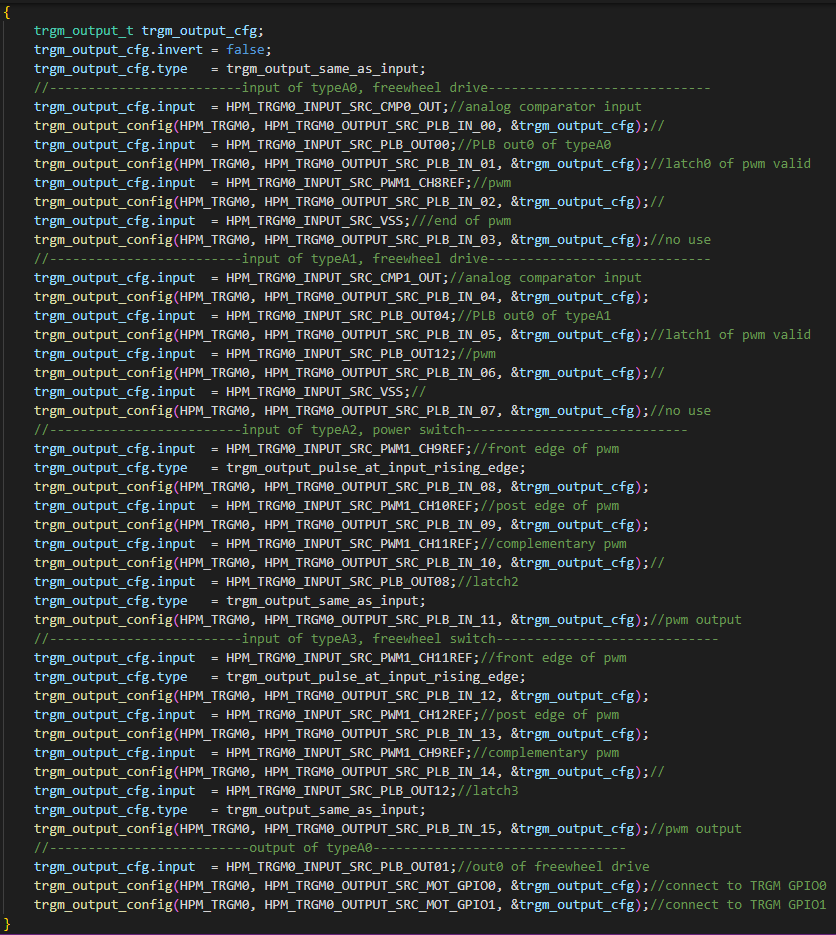
TRGM配置
● PWM8輸入信號的為電平信號。
● ACMP0、ACMP1輸入信號為電平信號。
● PWM9、PWM10、PWM11、PWM12為重構(gòu)PWM信號,輸入信號是上升沿有效。
● PLB的OUT0輸出是與ACMP0組合后的PWM輸出信號,同時(shí)配置給TRGM_IO0和TRGM_IO1,由具體應(yīng)用確定pimmux中配置。
PLB的主要特性:
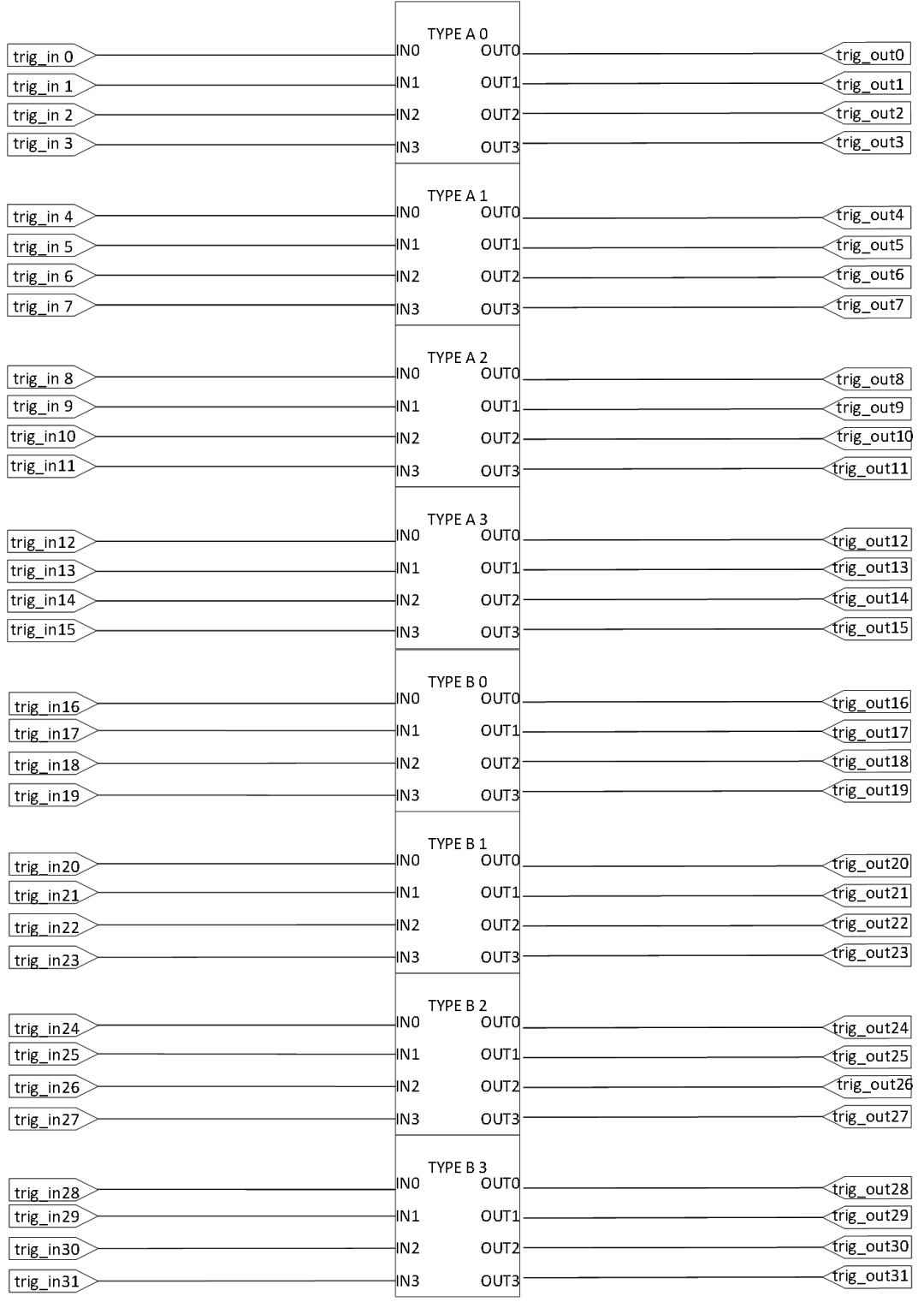
●包含兩種可編程類型:TYPE_A為4輸入、4輸出的查找表,TYPE_B包含4輸入、邏輯處理單元用于時(shí)序控制。
● HPM5300中包含4個(gè)TYPE_A和4個(gè)TYPE_B。
●本應(yīng)用使用了4個(gè)TYPE_A。
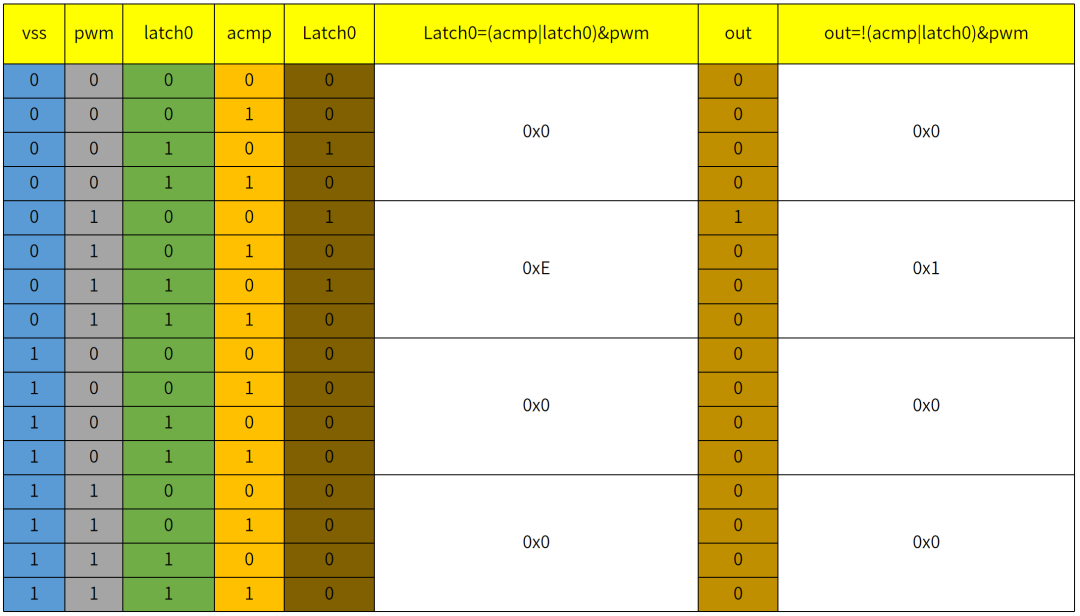
TYPE_A0、TYPE_A1綜合PWM和ACMP
●包含3個(gè)輸入、2個(gè)輸出,其中,3個(gè)輸入為ACMP輸出、自鎖信號、PWM電平信號,2個(gè)輸出為自鎖信號、續(xù)流功率管驅(qū)動(dòng)信號。
●輸出自鎖信號為ACMP輸出的鎖存信號,即一旦ACMP在PWM有效時(shí)間內(nèi)出現(xiàn)有效信號將一直鎖定,直至PWM信號無效時(shí)解除。
●續(xù)流功率管輸出信號由PWM與輸出自鎖組合實(shí)現(xiàn)。
● TYPE_A由查找表實(shí)現(xiàn),需通過真值表完成邏輯配置見下圖。
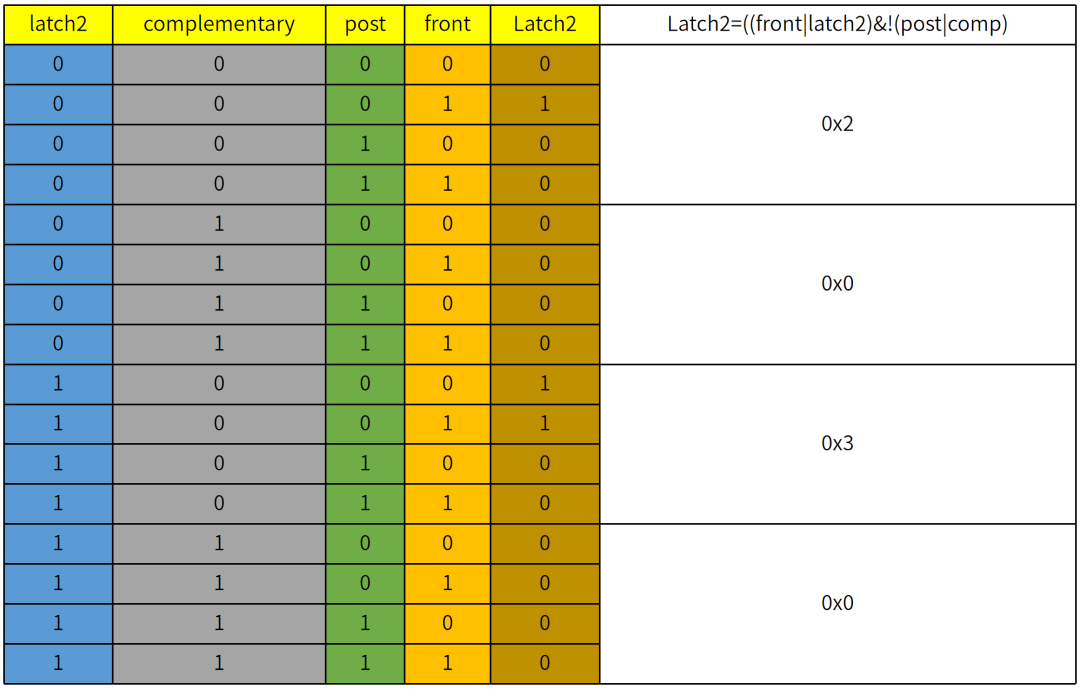
TYPE_A2、TYPE_A3邏輯說明
● PWM中心對齊的模式下要求:STA
● TYPE_A2包含4個(gè)輸入、1個(gè)輸出,4個(gè)輸入為PWM前沿輸出、PWM后沿輸出、PWM互補(bǔ)前沿輸出、自鎖信號,1個(gè)輸出為自鎖信號。
●輸出自鎖信號在PWM前沿輸入后自鎖,在PWM后沿輸入解鎖。其中,PWM互補(bǔ)前沿輸入的用于一個(gè)通道的兩個(gè)功率管驅(qū)動(dòng)信號之間的互鎖。
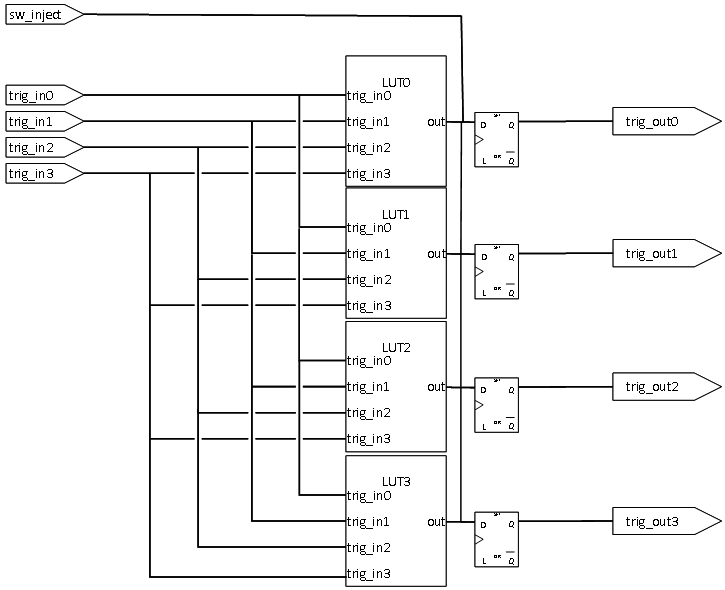
TYPE_A特點(diǎn)
●每個(gè)TYPE A通道有四個(gè)trig_in, 四個(gè)trig_out
●每個(gè)trig_out對應(yīng)一個(gè)查找表LUT
●可通過sw_inject將輸出注入到trig_out
●注入保持一個(gè)時(shí)鐘周期
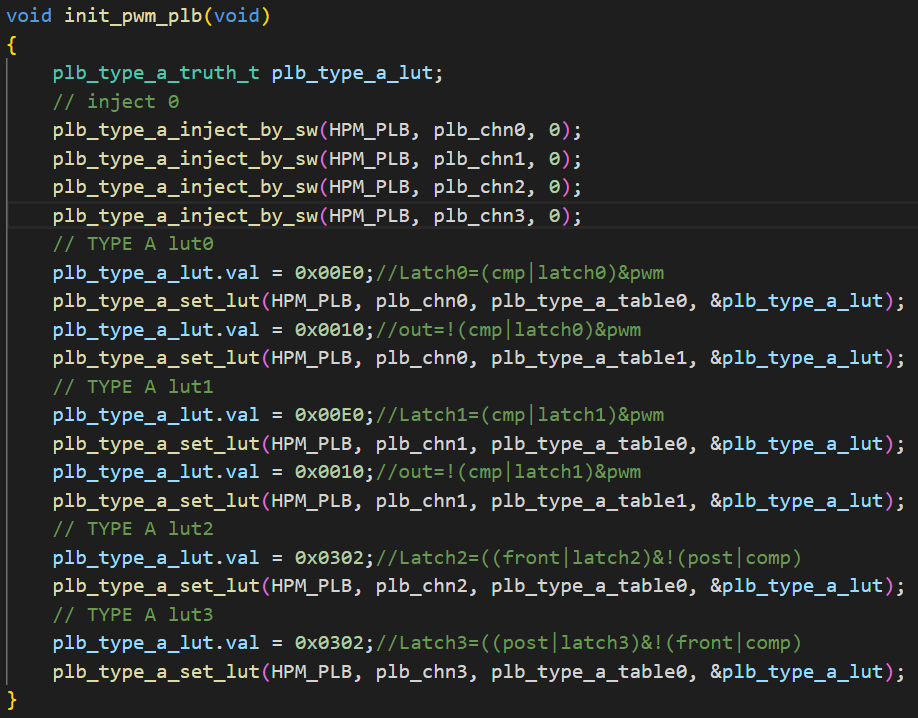
TYPE_A配置
● SDK中plb_type_a_inject_by_sw()函數(shù)完成軟件注入,實(shí)現(xiàn)初始化輸出。
● LUT查找表邏輯賦值函數(shù)為plb_type_a_set_lut(),可以配置不同通道和不同查找表,達(dá)到邏輯輸出功能。
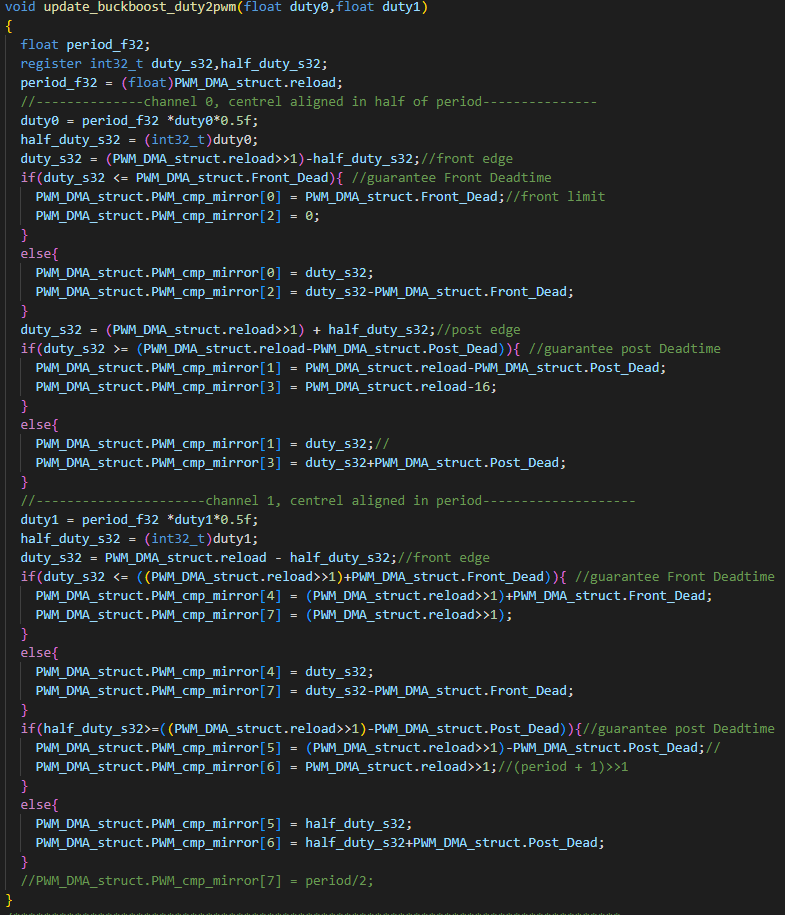
占空比更新
●為了減少CPU的占用,程序?qū)WM中比較器CMP0-CMP7的數(shù)據(jù)存儲(chǔ)于高速RAM中,PWM_DMA_struct.PWM_cmp_mirror[0]-PWM_DMA_struct.PWM_cmp_mirror[7]。通過DMA更新PWM寄存器,限于篇幅限制,本文不再贅述。
●由于PWM沒有配置成互補(bǔ)輸出模式,需要軟件實(shí)現(xiàn)死區(qū)配置,其中前后沿的死區(qū)為單獨(dú)參數(shù),可以配置不同的數(shù)值,PWM_DMA_struct.Front_Dead、PWM_DMA_struct.Post_Dead。此外,例程中包含了占空比限幅,如果在前期計(jì)算時(shí)占空比時(shí)已經(jīng)對占空比限幅,可以忽略相應(yīng)限幅處理。
●浮點(diǎn)運(yùn)算中需在浮點(diǎn)常數(shù)后面加f,否則會(huì)增加定點(diǎn)轉(zhuǎn)浮點(diǎn)運(yùn)算。
●例程選用的是硬交錯(cuò)方案,即兩路輸出的中心點(diǎn)強(qiáng)制相差180°。但外設(shè)配置同樣支持軟交錯(cuò)方案,需修改占空比函數(shù)。
輸出波形

buck模式下波形輸出

buck模式下ACMP動(dòng)作后波形輸出

boost模式下波形輸出

boost模式下ACMP動(dòng)作后波形輸出
小結(jié)
● 該操作方法實(shí)現(xiàn)了硬件快速續(xù)流控制功能,集成度高且閾值數(shù)字可控,優(yōu)化成本和面積。
●結(jié)合PLB功能,令buck-boost模式切合更加自由。
● PWM模塊與PLB結(jié)合,可以輕松克服單時(shí)基PWM模塊實(shí)現(xiàn)跨周期輸出問題,該功能同樣適用于單PWM模塊的移相控制。
●兩相交錯(cuò)輸出,減少紋波,增加EMC能力。
●強(qiáng)大的DMA功能,減少了讀取外設(shè)寄存器的時(shí)間,并通過硬件觸發(fā)省去了CPU對寄存器賦值時(shí)間。
● HPM5300系列高性價(jià)比MCU,運(yùn)算速度快,在數(shù)字電源控制中更加自如。
-
變換器
+關(guān)注
關(guān)注
17文章
2098瀏覽量
109305 -
驅(qū)動(dòng)設(shè)計(jì)
+關(guān)注
關(guān)注
1文章
111瀏覽量
15285 -
先楫半導(dǎo)體
+關(guān)注
關(guān)注
10文章
214瀏覽量
2120
發(fā)布評論請先 登錄
相關(guān)推薦
基于先楫HPM5300 RISC-V內(nèi)核MCU的HPM5361EVK開發(fā)板測評效果(二)

降維打擊!對標(biāo)主流ARM內(nèi)核MCU,先楫RISC-V高性能HPM5300憑何爭性價(jià)比之王?
【先楫HPM5361EVK開發(fā)板試用體驗(yàn)】認(rèn)識和了解先楫HPM5361EVK開發(fā)板
【先楫HPM5361EVK開發(fā)板試用體驗(yàn)】先楫HPM5361EVK開發(fā)板初體驗(yàn)
先楫半導(dǎo)體HPM5300EVK開發(fā)板試用作品手冊免費(fèi)下載
先楫新品HPM5300 ,你們都在關(guān)注啥功能?
【新品體驗(yàn)】先楫HPM5361EVK開發(fā)板免費(fèi)試用
先楫半導(dǎo)體HPM5361EVK開發(fā)板開發(fā)資料免費(fèi)下載
【先楫HPM5361EVK開發(fā)板試用體驗(yàn)】1上手HPM5361
先楫半導(dǎo)體高性能運(yùn)動(dòng)控制MCU HPM5300即將發(fā)布
先楫半導(dǎo)體推出高性能運(yùn)動(dòng)控制MCU HPM5300系列
先楫半導(dǎo)體高性能運(yùn)動(dòng)控制MCU HPM5300系列正式發(fā)布!

降維打擊!對標(biāo)主流ARM內(nèi)核MCU,先楫RISC-V高性能HPM5300憑何爭性價(jià)比之王?

HPM5300+ZDP1440高性能工業(yè)控制與顯示組合震撼登場






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論