") MCXA153系列MCU正交解碼模塊的特點(diǎn)和應(yīng)用示例
MCXA153系列MCU正交解碼模塊的特點(diǎn)和應(yīng)用示例
全新的MCX A系列融合了恩智浦通用MCU的特點(diǎn),適用更為廣泛的通用應(yīng)用,實(shí)現(xiàn)了低成本,低功耗,高安全性和高可靠性。
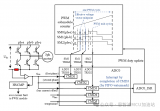
針對(duì)工業(yè)方面的應(yīng)用需求,很多需要提供對(duì)編碼器的支持,全新MCX A系列MCU集成了片上eQDC模塊,新版的eQDC模塊在以往強(qiáng)大功能的基礎(chǔ)上又進(jìn)行了升級(jí)。具體框圖如下所示:
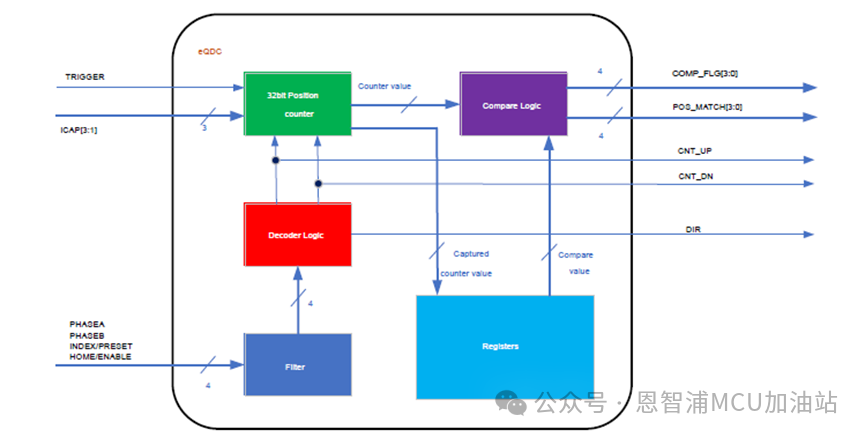
圖1 eQDC模塊框圖
eQDC的功能概述
eQDC是專門針對(duì)于正交編碼器進(jìn)行正交解碼的外設(shè)模塊,其包含了一個(gè)用于正交解碼的32位計(jì)數(shù)器,使其能夠適用于超高線數(shù)編碼器。具有專門用于轉(zhuǎn)速檢測(cè)的位置差計(jì)數(shù)器、位置差時(shí)間計(jì)數(shù)器與邊沿時(shí)間計(jì)數(shù)器,因此能夠很容易完成轉(zhuǎn)速的關(guān)鍵信息測(cè)量。同時(shí)還具有可用于進(jìn)行位置伺服控制的轉(zhuǎn)數(shù)計(jì)數(shù)器。正交編碼器目前支持X1,X2,X4工作模式。

圖2 正常正交編碼X1 模式

圖3 正常正交編碼X2 模式

圖4 正常正交編碼X4 模式
MCX A系列所集成的eQDC模塊,計(jì)數(shù)模式非常靈活,除了支持傳統(tǒng)的正交編碼器信號(hào)輸入,也支持常規(guī)伺服脈沖輸入信號(hào),例如方向/脈沖信號(hào)輸入和CM/CCM信號(hào)輸入。對(duì)于這類信號(hào)的處理,傳統(tǒng)方式需要通過FPGA來實(shí)現(xiàn),eQDC模塊的增強(qiáng)功能能夠有效支持這類計(jì)數(shù)模式,大大擴(kuò)展了eQDC的應(yīng)用范疇。

圖5 方向/脈沖計(jì)數(shù)模式

圖6 CM/CCM計(jì)數(shù)模式
MCX A系列所集成的eQDC模塊,除了可以支持常規(guī)的正交編碼器輸入信號(hào),如PHASHEA,PHASHEB,INDEX,HOME等信號(hào),還支持多個(gè)外部輸入信號(hào),例如可以通過ICAP[3:1]對(duì)應(yīng)的IO信號(hào)輸入,有效捕獲并鎖存具體位置點(diǎn)的32位位置計(jì)數(shù)值(POS),并且對(duì)于外部輸入信號(hào),也可以通過配置所搭載的Glitch Filter,有效濾除輸入信號(hào)中的干擾。
eQDC模塊也支持多種事件信號(hào)輸出,如用戶內(nèi)部預(yù)設(shè)計(jì)數(shù)值與當(dāng)前位置計(jì)數(shù)寄存器(POS)值匹配的時(shí)候,POS_MATCH[3:0]信號(hào)輸出有效。當(dāng)用戶設(shè)定比較值功能的時(shí)候,則在當(dāng)前位置計(jì)數(shù)寄存器(POS)值符合相應(yīng)的比較條件時(shí),COMP_FLG[3:1]信號(hào)輸出有效,此外還有DIR信號(hào)可配置為輸出當(dāng)前計(jì)數(shù)增減方向。
eQDC模塊內(nèi)部也集成了16位的旋轉(zhuǎn)轉(zhuǎn)數(shù)計(jì)數(shù)器,有效記錄正反轉(zhuǎn)的累積圈數(shù)。對(duì)伺服位置控制有較大用處。
eQDC的測(cè)速方法
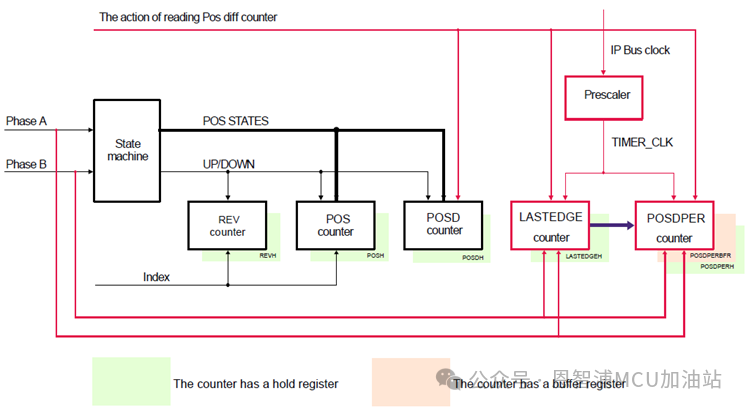
圖7eQDC的計(jì)數(shù)框圖
針對(duì)eQDC模塊測(cè)量速度的方案可以使用M/T法為例,正交解碼模塊中有五種不同的計(jì)數(shù)器,其中POSDH、POSDPERH作為關(guān)鍵寄存器可直接用于提取軟件測(cè)速周期間隔之間的脈沖邊沿?cái)?shù),及與此對(duì)應(yīng)的脈沖邊沿間的高頻時(shí)鐘計(jì)數(shù)。
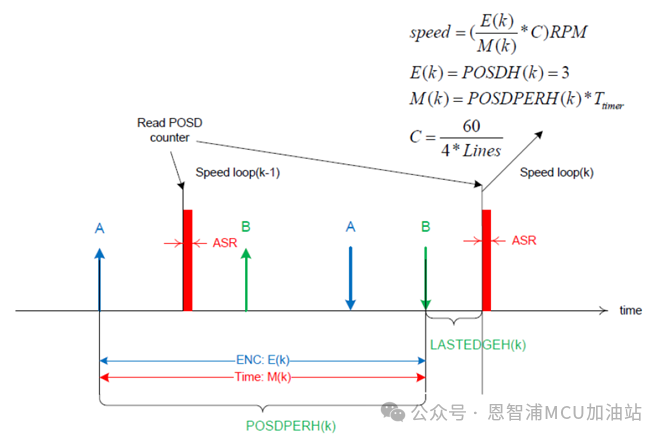
圖8eQDC的M/T法測(cè)速原理
圖中A,B為編碼器正交脈沖邊沿,下面給出了寄存器在進(jìn)行測(cè)速時(shí)的計(jì)數(shù)方式,POSD寄存器能夠準(zhǔn)確讀出在兩個(gè)POSD讀取指令間脈沖邊沿計(jì)數(shù),POSDH寄存器能夠獲得兩次POSD讀取之間的脈沖邊沿計(jì)數(shù)(對(duì)應(yīng)圖中E(k),用于距離測(cè)量),而LASTEDGEH寄存器代表了上一編碼器脈沖邊沿至POSD讀取時(shí)刻間的高頻時(shí)鐘計(jì)數(shù),用于補(bǔ)償高頻脈沖計(jì)數(shù)時(shí)間。
在進(jìn)行POSD讀取的T1(圖中speed loop(k-1))時(shí)刻,將此時(shí)LASTEDGEH值作為POSDPER重新開始計(jì)數(shù)的初值。而后每次出現(xiàn)脈沖邊沿都將POSDPER當(dāng)前值暫存到POSDPERBFR寄存器,直到下一次POSD讀取的T2(圖中speed loop(k))時(shí)刻,POSDPERBFR寄存器值存入POSDPERH保持寄存器,該值代表兩次POSD讀取前的脈沖邊沿之間的高頻時(shí)鐘計(jì)數(shù)(對(duì)應(yīng)圖中M(k),用于時(shí)間測(cè)量)。由此獲得的時(shí)間和距離可根據(jù)公式計(jì)算得到當(dāng)前速度。
今天為大家?guī)鞰CXA153系列MCU正交解碼模塊的特點(diǎn)和應(yīng)用示例,更多詳細(xì)信息可訪問恩智浦官網(wǎng)查看最新的MCXA微處理器數(shù)據(jù)手冊(cè)。
-
mcu
+關(guān)注
關(guān)注
146文章
17148瀏覽量
351186 -
編碼器
+關(guān)注
關(guān)注
45文章
3643瀏覽量
134511 -
恩智浦
+關(guān)注
關(guān)注
14文章
5860瀏覽量
107457 -
微處理器
+關(guān)注
關(guān)注
11文章
2263瀏覽量
82445 -
解碼模塊
+關(guān)注
關(guān)注
0文章
2瀏覽量
6219
原文標(biāo)題:MCX A系列微控制器之正交解碼模塊大解析
文章出處:【微信號(hào):NXP_SMART_HARDWARE,微信公眾號(hào):恩智浦MCU加油站】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
恩智浦FRDM-MCXA153 RT-Thread開發(fā)實(shí)戰(zhàn)(六):I2C總線開發(fā)與應(yīng)用
恩智浦FRDM-MCXA153 RT-Thread實(shí)踐指南 實(shí)現(xiàn)和優(yōu)化RT-Thread的SPI驅(qū)動(dòng)

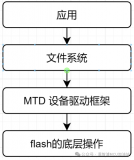
基于NXP MCXA153 MCU實(shí)現(xiàn)RT-Thread的MTD NOR Flash驅(qū)動(dòng)
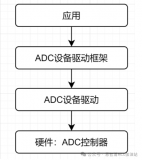
基于恩智浦FRDM-MCXA153開發(fā)板實(shí)現(xiàn)RT-Thread的ADC驅(qū)動(dòng)
NXP FRDM-MCXA153 RT-Thread實(shí)踐指南之UART介紹

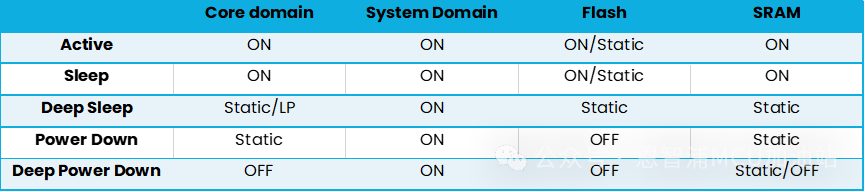
MCXA153 MCU的低功耗特性及優(yōu)化設(shè)計(jì)
MCXA153 MCU的系統(tǒng)啟動(dòng)

基于MCXA153 MCU的電機(jī)控制方案
恩智浦MCU解讀 MCX A系列微處理器之時(shí)鐘架構(gòu)

恩智浦MCU解析 MCX A系列微處理器之系統(tǒng)架構(gòu)
恩智浦MCX A系列微處理器之供電系統(tǒng)
全新MCX A系列MCU FRDM開發(fā)板:開箱即用的高效體驗(yàn)

FRDM-MCXA153開發(fā)板的開箱體驗(yàn)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論