 陀螺儀LSM6DSOW開發(2)----上報匿名上位機實現可視化
陀螺儀LSM6DSOW開發(2)----上報匿名上位機實現可視化
概述
本文檔詳細介紹了如何使用匿名助手的上位機實現加速度計和陀螺儀數據的可視化顯示。內容涵蓋了加速度計和陀螺儀的工作原理、上位機通信協議、數據處理流程以及具體的代碼實現。通過本文檔,讀者可以了解如何通過串口通訊協議將傳感器數據發送到上位機,并進行實時的曲線顯示和數據分析。
最近在弄ST和瑞薩RA的課程,需要樣片的可以加群申請:615061293 。

視頻教學
[https://www.bilibili.com/video/BV1HU411S7Az/]
樣品申請
[https://www.wjx.top/vm/OhcKxJk.aspx#]
源碼下載
[https://download.csdn.net/download/qq_24312945/89590386]
硬件準備
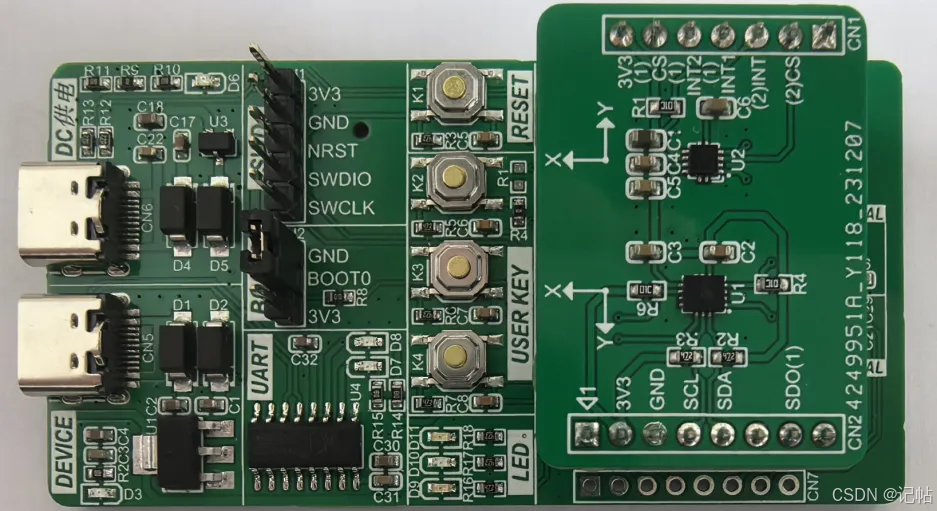
首先需要準備一個開發板,這里我準備的是自己繪制的開發板,需要的可以進行申請。
主控為STM32H503CB,陀螺儀為LSM6DSOW,磁力計為LIS2MDL。

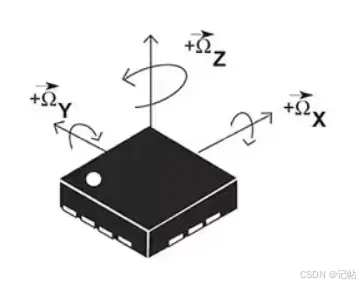
參考坐標系

加速度計工作方式
假設立方體在外太空,那里的一切都是失重的,球會簡單地漂浮在立方體的中心。
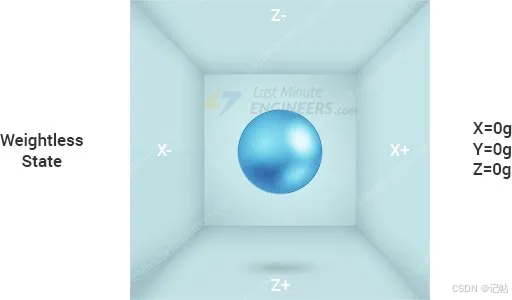
現在,假設每面墻代表一個特定的軸。
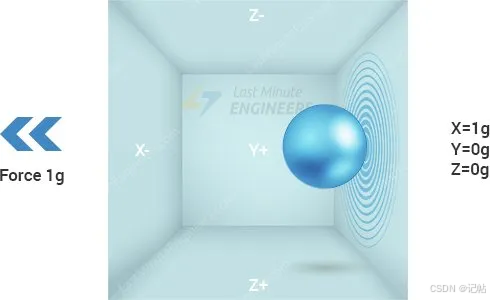
如果我們突然以 1g 的加速度向左移動盒子(單個 G 力 1g 相當于重力加速度 9.8 m/s 2),球無疑會撞到墻壁 X。如果我們測量球對墻壁施加的力X,我們可以得到沿X軸的輸出值為1g。
讓我們看看當我們把那個立方體放在地球上時會發生什么。球將簡單地落在墻 Z 上,施加 1g 的力,如下圖所示:
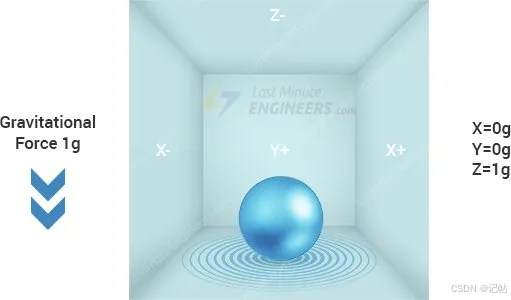
在這種情況下,盒子沒有移動,但我們仍然在 Z 軸上得到 1g 的讀數。這是因為重力(實際上是加速度的一種形式)以 1g 的力向下拉球。
雖然此模型并不完全代表真實世界的加速度計傳感器是如何構建的,但它通常有助于理解為什么加速度計的輸出信號通常以 ±g 為單位指定,或者為什么加速度計在靜止時在 z 軸上讀數為 1g,或者您可以在不同方向上獲得什么樣的加速度計讀數。
上位機通訊
這里使用的是匿名助手的上位機
https://gitee.com/anotc/AnoAssistant
有專門的通訊協議

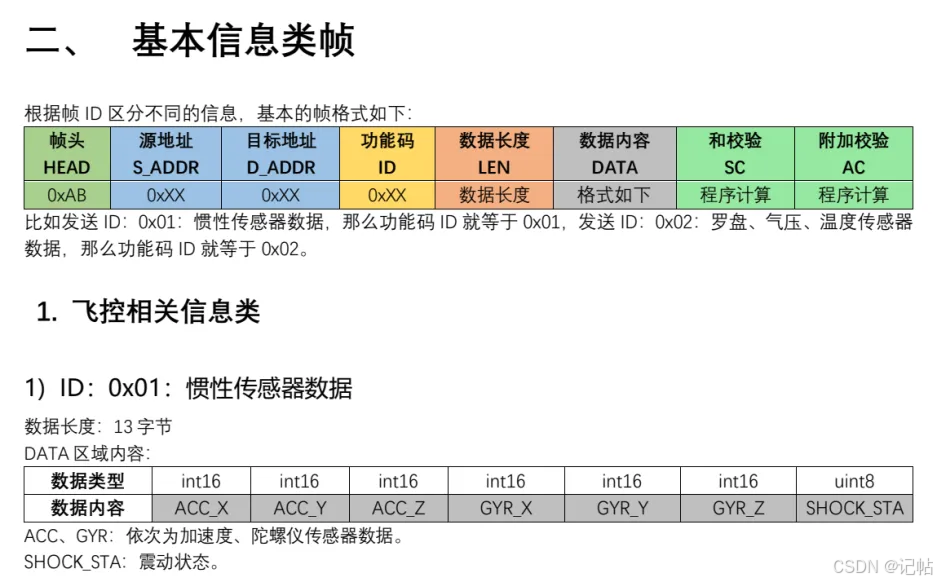
串口通訊協議格式如下所示,需要注意傳輸為小端模式傳輸。
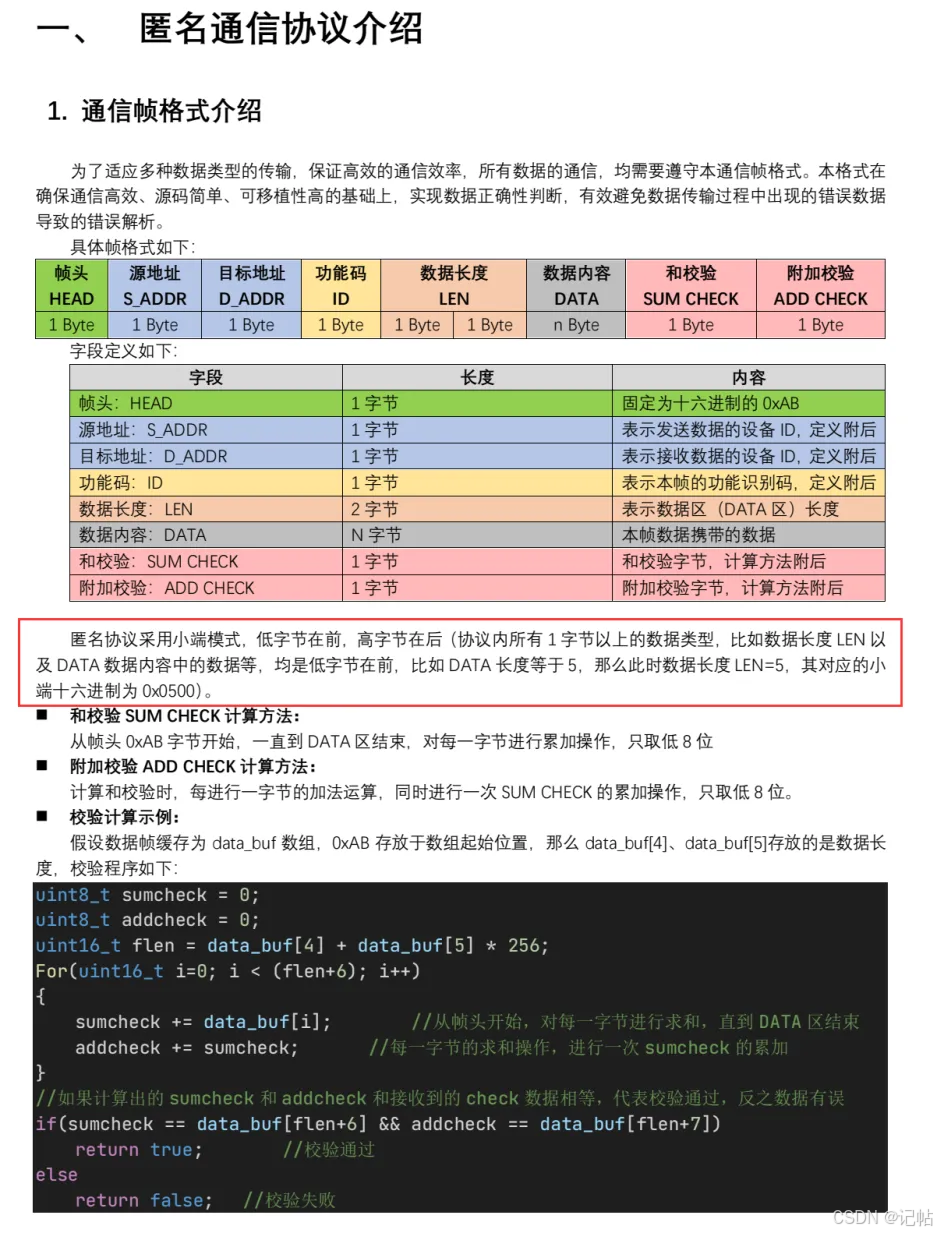
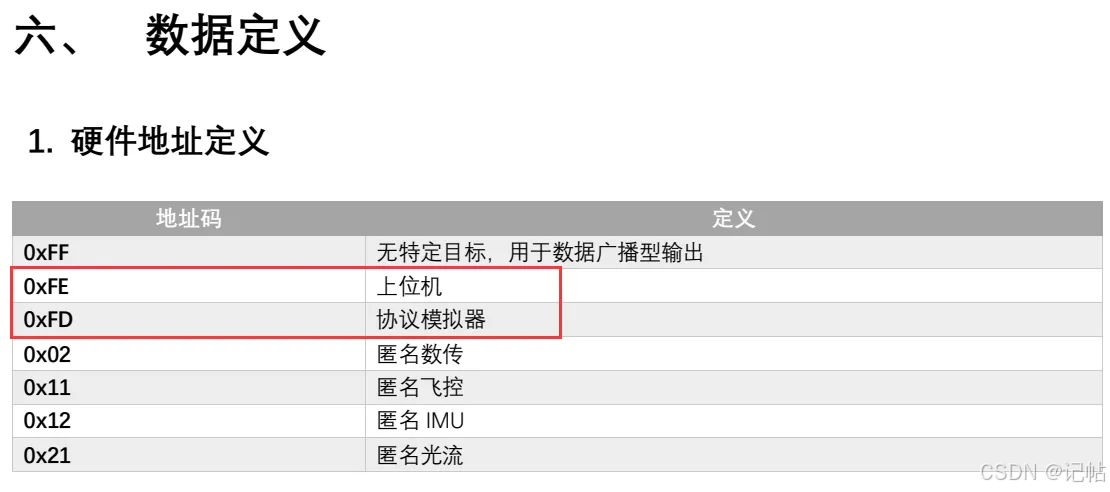
對應的源地址和目標地址分別為0xFD和0xFE。
我們只需要上報加速度和陀螺儀數據,所以功能碼為0x01,數據長度為0x0D,需要主要為小端模式傳輸。
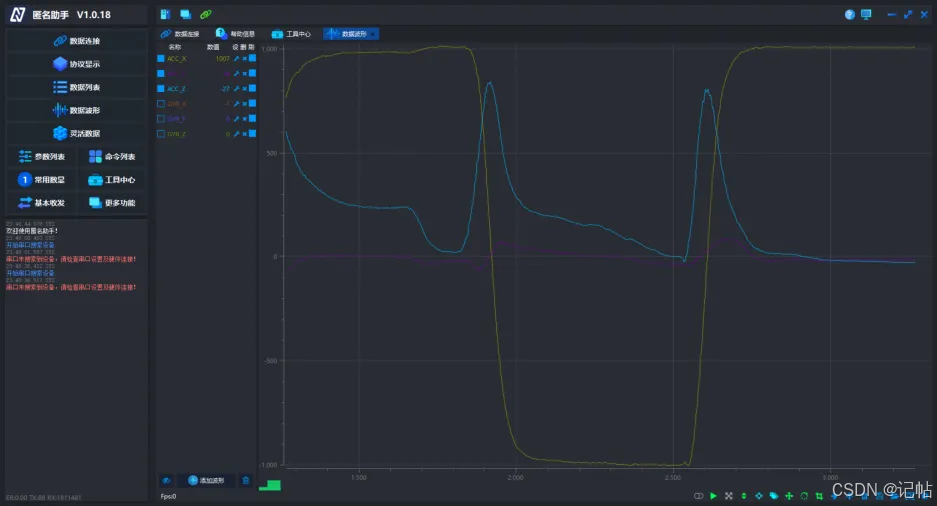
加速度演示
實測移動模塊分別為X、Y、Z軸向下,可以看見數值基本上為1000mg。

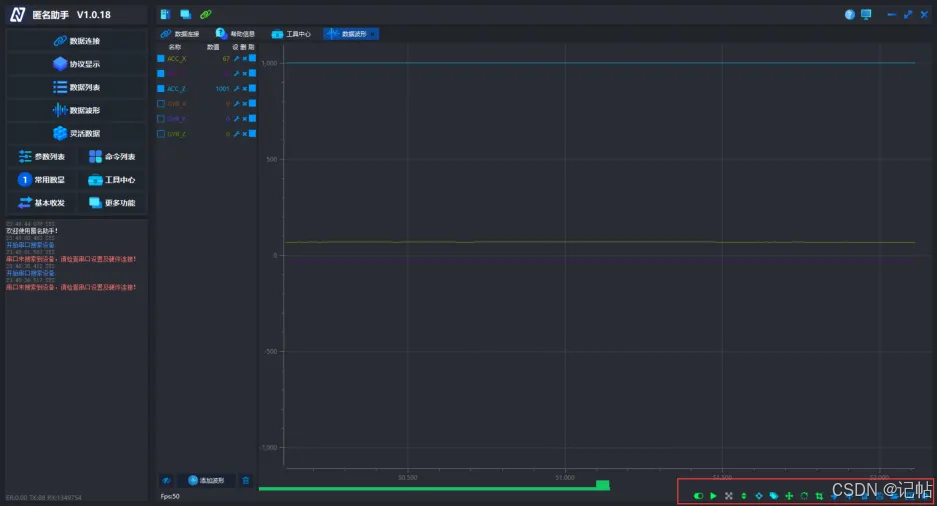
加速度曲線顯示
設置數據列表->添加波形,可以添加加速度或者角速度曲線
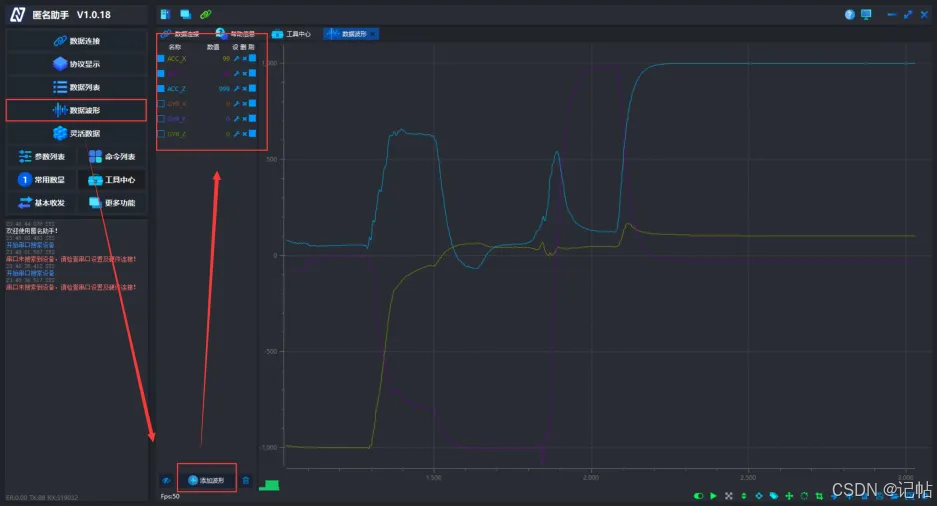
可以通過右下角設置具體顯示。
陀螺儀工作方式
加速度計測量線性加速度,而陀螺儀測量角旋轉。為此,他們測量了科里奧利效應產生的力。
陀螺儀是一種運動傳感器,能夠感測物體在一軸或多軸上的旋轉角速度。它能夠精確地感測自由空間中復雜的移動動作,因此成為追蹤物體移動方位和旋轉動作的必要設備。與加速計和電子羅盤不同,陀螺儀不需要依賴外部力量(如重力或磁場),可以自主地發揮其功能。因此,從理論上講,只使用陀螺儀就可以完成姿態導航的任務。
陀螺儀的每個通道檢測一個軸的旋轉。也就是說陀螺儀通過測量自身的旋轉狀態,判斷出設備當前運動狀態,是向前、向后、向上、向下、向左還是向右呢,是加速(角速度)還是減速(角速度)呢,都可以實現,但是要判斷出設備的方位(東西南北),陀螺儀就沒有辦法。
MEMS陀螺儀主要利用科里奧利力(旋轉物體在有徑向運動時所受到的切向力)原理,公開的微機械陀螺儀均采用振動物體傳感角速度的概念,利用振動來誘導和探測科里奧利力。
MEMS陀螺儀的核心是一個微加工機械單元,在設計上按照一個音叉機制共振運動,通過科里奧利力原理把角速率轉換成一個特定感測結構的位移。
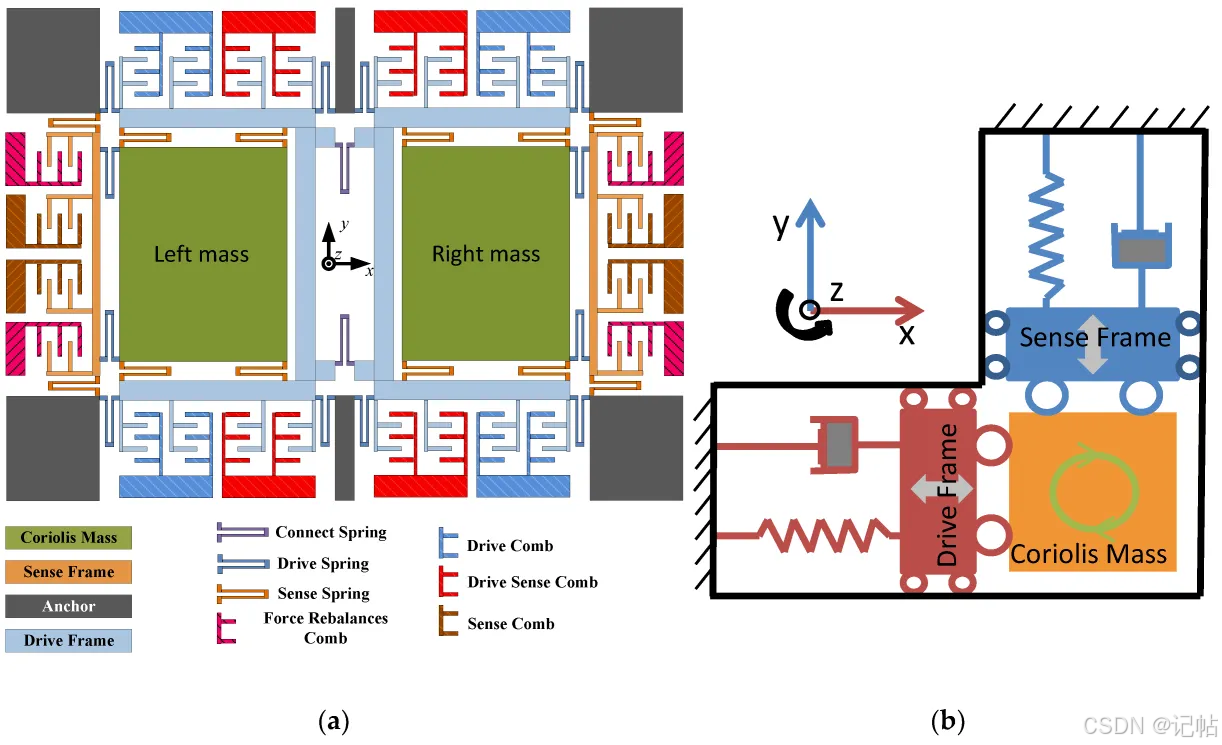
兩個相同的質量塊以方向相反的做水平震蕩。當外部施加一個角速率,就會出現一個科氏力,力的方向垂直于質量運動方向,如垂直方向箭頭所示。產生的科氏力使感測質量發生位移,位移大小與所施加的角速率大小成正比,科氏力引起的電容變化即可計算出角速率大小。
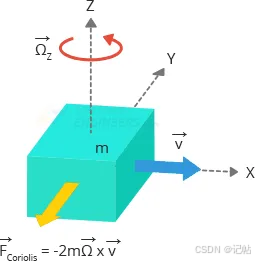
科里奧利效應指出,當質量 (m) 以速度 (v) 沿特定方向移動并施加外部角速率 (Ω)(紅色箭頭)時,科里奧利效應會產生一個力(黃色箭頭),導致質量垂直移動。該位移的值與應用的角速率直接相關。
上報源碼
/* USER CODE BEGIN 2 */
printf("HELLO!n");
HAL_GPIO_WritePin(CS1_GPIO_Port, CS1_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(SA0_GPIO_Port, SA0_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(CS2_GPIO_Port, CS2_Pin, GPIO_PIN_SET);
HAL_Delay(100);
stmdev_ctx_t dev_ctx;
/* Initialize mems driver interface */
dev_ctx.write_reg = platform_write;
dev_ctx.read_reg = platform_read;
dev_ctx.mdelay = platform_delay;
dev_ctx.handle = &SENSOR_BUS;
/* Init test platform */
// platform_init();
/* Wait sensor boot time */
platform_delay(BOOT_TIME);
/* Check device ID */
lsm6dso_device_id_get(&dev_ctx, &whoamI);
printf("LSM6DSO_ID=0x%x,whoamI=0x%x",LSM6DSO_ID,whoamI);
if (whoamI != LSM6DSO_ID)
while (1);
/* Restore default configuration */
lsm6dso_reset_set(&dev_ctx, PROPERTY_ENABLE);
do {
lsm6dso_reset_get(&dev_ctx, &rst);
} while (rst);
/* Disable I3C interface */
lsm6dso_i3c_disable_set(&dev_ctx, LSM6DSO_I3C_DISABLE);
/* Enable Block Data Update */
lsm6dso_block_data_update_set(&dev_ctx, PROPERTY_ENABLE);
/* Set Output Data Rate */
lsm6dso_xl_data_rate_set(&dev_ctx, LSM6DSO_XL_ODR_52Hz);
lsm6dso_gy_data_rate_set(&dev_ctx, LSM6DSO_GY_ODR_52Hz);
/* Set full scale */
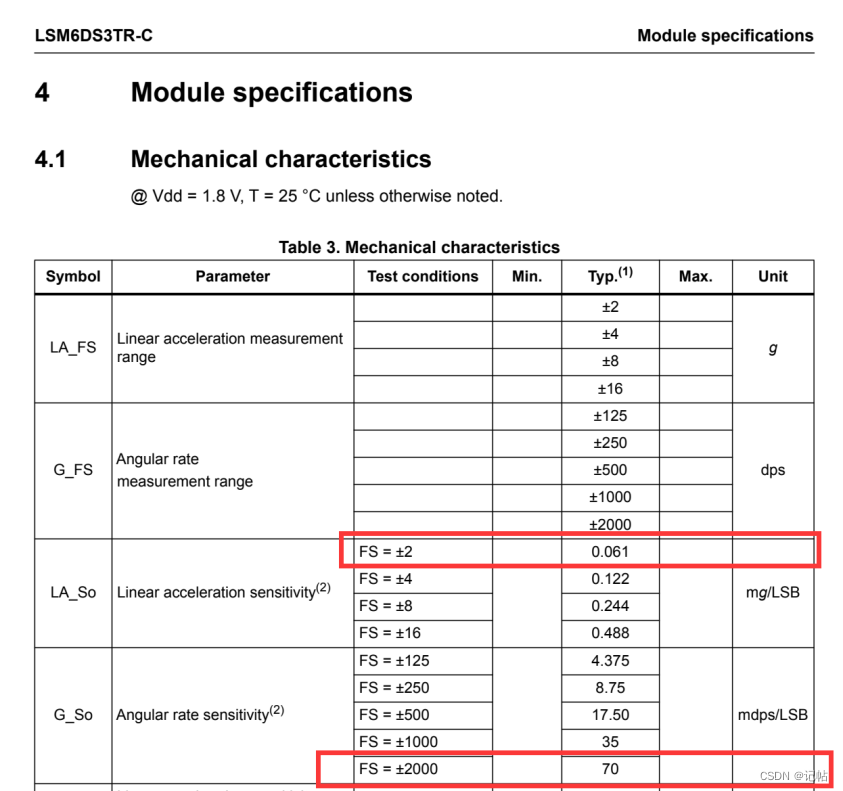
lsm6dso_xl_full_scale_set(&dev_ctx, LSM6DSO_2g);
lsm6dso_gy_full_scale_set(&dev_ctx, LSM6DSO_2000dps);
/* Configure filtering chain(No aux interface)
* Accelerometer - LPF1 + LPF2 path
*/
lsm6dso_xl_hp_path_on_out_set(&dev_ctx, LSM6DSO_LP_ODR_DIV_100);
lsm6dso_xl_filter_lp2_set(&dev_ctx, PROPERTY_ENABLE);
int16_t acc_int16[3] ={0,0,0};
int16_t gyr_int16[3] ={0,0,0};
float acc[3] = {0};
float gyr[3] = {0};
uint8_t data[21]={0};
data[0]=0xAB;//幀頭
data[1]=0xFD;//源地址
data[2]=0xFE;//目標地址
data[3]=0x01;//功能碼ID
data[4]=0x0D;//數據長度LEN
data[5]=0x00;//數據長度LEN 13
uint8_t sumcheck = 0;
uint8_t addcheck = 0;
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
uint8_t reg;
/* Read output only if new xl value is available */
lsm6dso_xl_flag_data_ready_get(&dev_ctx, ®);
if (reg) {
/* Read acceleration field data */
memset(data_raw_acceleration, 0x00, 3 * sizeof(int16_t));
lsm6dso_acceleration_raw_get(&dev_ctx, data_raw_acceleration);
acceleration_mg[0] =
lsm6dso_from_fs2_to_mg(data_raw_acceleration[0]);
acceleration_mg[1] =
lsm6dso_from_fs2_to_mg(data_raw_acceleration[1]);
acceleration_mg[2] =
lsm6dso_from_fs2_to_mg(data_raw_acceleration[2]);
// printf( "Acceleration [mg]:%4.2ft%4.2ft%4.2frn",
// acceleration_mg[0], acceleration_mg[1], acceleration_mg[2]);
//匿名上位機
acc_int16[0]=(int16_t)(acceleration_mg[0]);
acc_int16[1]=(int16_t)(acceleration_mg[1]);
acc_int16[2]=(int16_t)(acceleration_mg[2]);
}
lsm6dso_gy_flag_data_ready_get(&dev_ctx, ®);
if (reg) {
/* Read angular rate field data */
memset(data_raw_angular_rate, 0x00, 3 * sizeof(int16_t));
lsm6dso_angular_rate_raw_get(&dev_ctx, data_raw_angular_rate);
angular_rate_mdps[0] =
lsm6dso_from_fs2000_to_mdps(data_raw_angular_rate[0]);
angular_rate_mdps[1] =
lsm6dso_from_fs2000_to_mdps(data_raw_angular_rate[1]);
angular_rate_mdps[2] =
lsm6dso_from_fs2000_to_mdps(data_raw_angular_rate[2]);
// printf("Angular rate [mdps]:%4.2ft%4.2ft%4.2frn",
// angular_rate_mdps[0], angular_rate_mdps[1], angular_rate_mdps[2]);
gyr_int16[0]=(int16_t)(angular_rate_mdps[0]/1000);
gyr_int16[1]=(int16_t)(angular_rate_mdps[1]/1000);
gyr_int16[2]=(int16_t)(angular_rate_mdps[2]/1000);
}
// lsm6dso_temp_flag_data_ready_get(&dev_ctx, ®);
// if (reg) {
// /* Read temperature data */
// memset(&data_raw_temperature, 0x00, sizeof(int16_t));
// lsm6dso_temperature_raw_get(&dev_ctx, &data_raw_temperature);
// temperature_degC =
// lsm6dso_from_lsb_to_celsius(data_raw_temperature);
// printf("Temperature [degC]:%6.2frn", temperature_degC);
// }
data[7]=acc_int16[0] >>8;//ACC_X
data[6]=acc_int16[0];
data[9]=acc_int16[1] >>8;//ACC_Y
data[8]=acc_int16[1];
data[11]=acc_int16[2] >>8;//ACC_Z
data[10]=acc_int16[2];
data[13]=gyr_int16[0] >>8;//GYR_X
data[12]=gyr_int16[0];
data[15]=gyr_int16[1] >>8;//GYR_Y
data[14]=gyr_int16[1];
data[17]=gyr_int16[2] >>8;//GYR_Z
data[16]=gyr_int16[2];
data[18]=0;
sumcheck = 0;
addcheck = 0;
for(uint16_t i=0; i < 19; i++)
{
sumcheck += data[i]; //從幀頭開始,對每一字節進行求和,直到 DATA 區結束
addcheck += sumcheck; //每一字節的求和操作,進行一次 sumcheck 的累加
}
data[19]=sumcheck;
data[20]=addcheck;
HAL_UART_Transmit(&huart1 , (uint8_t *)&data, 21, 0xFFFF);
HAL_Delay(10);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
演示
旋轉X軸的加速度數據。
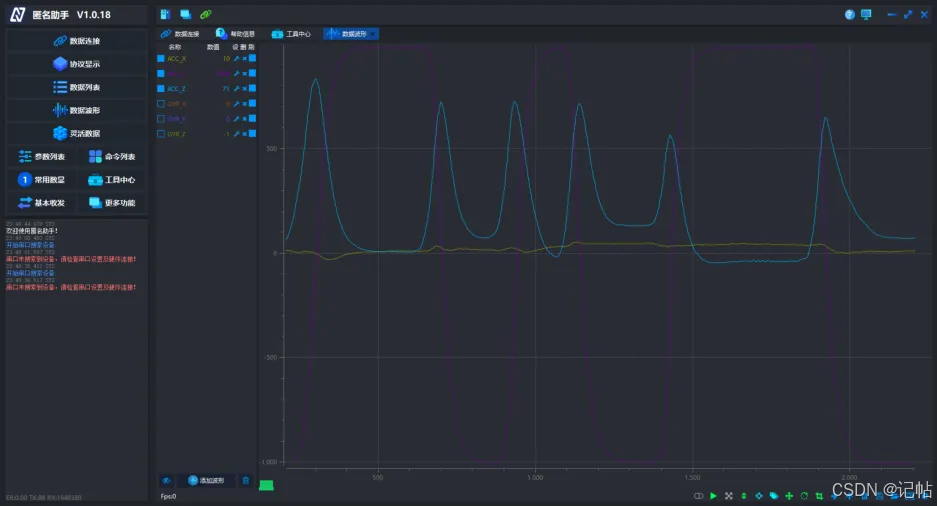
旋轉Y軸的加速度數據。
旋轉Z軸的加速度數據。 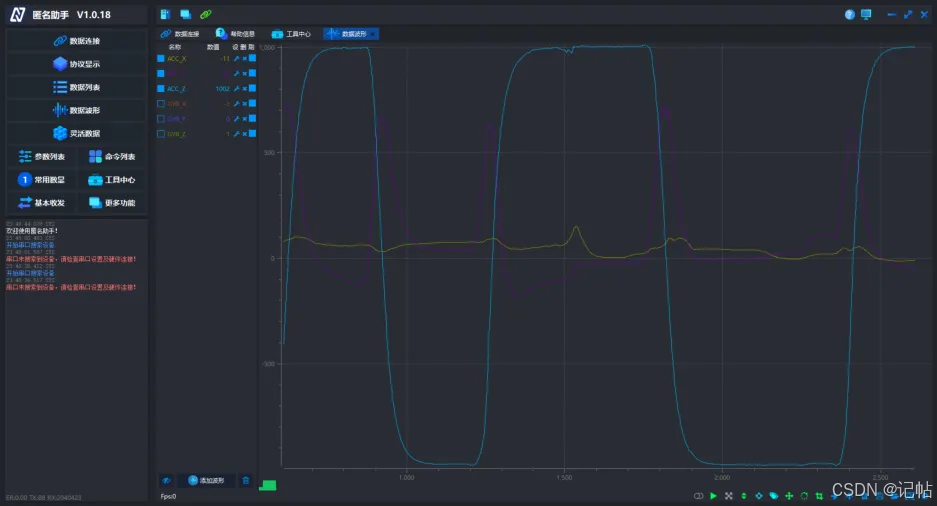
旋轉X軸的角速度數據。

旋轉Y軸的角速度數據。
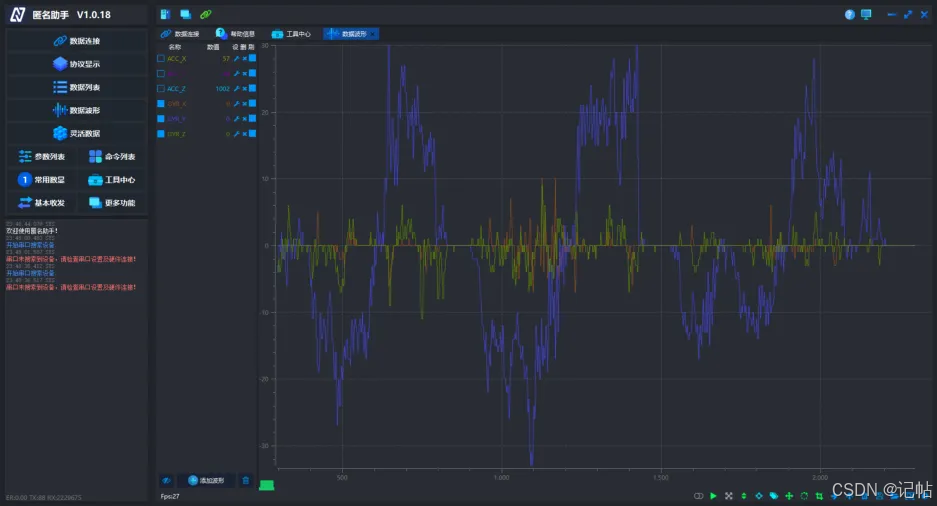
旋轉Z軸的角速度數據。

審核編輯 黃宇
-
陀螺儀
+關注
關注
44文章
784瀏覽量
98712 -
上位機
+關注
關注
27文章
942瀏覽量
54813
發布評論請先 登錄
相關推薦

陀螺儀LSM6DSV16X與AI集成(7)----FIFO數據讀取與配置

陀螺儀LSM6DSOW開發(1)----輪詢獲取陀螺儀數據

陀螺儀LSM6DSOW開發(3)----FIFO數據讀取與配置
陀螺儀LSM6DSOW開發(5)----MotionFX庫解析空間坐標
陀螺儀LSM6DSV16X與AI集成(14)----上報匿名上位機
供應LSM6DSLTR LSM6DSL 傳感器 LSM6DSMTR LSM6DSM
基于ARM 的陀螺儀測控系統的設計與實現
MEMS陀螺儀技術原理_三軸陀螺儀技術原理

驅動LSM6DS3TR-C實現高效運動檢測與數據采集(4)----上報匿名上位機實現可視化
上位機可視化界面編程軟件有哪些
陀螺儀LSM6DSOW開發(4)----中斷獲取FIFO數據





 工商網監
工商網監
評論