 實現自動駕駛,唯有端到端?
實現自動駕駛,唯有端到端?
自動駕駛技術的迅速發展,越來越多的企業開始探索更加智能、高效的解決方案,隨著AI大模型入場,自動駕駛涌現出許多新的技術,智駕行業技術路徑從CNN、RNN、GAN、再到Transformer大模型,去年行業主流方案還是輕高精地圖城區智駕,今年大家的目標都瞄到了端到端(End-to-End, E2E)。端到端作為一種新興的技術路徑,逐漸受到業內的廣泛關注。端到端解決方案在自動駕駛中的應用,意味著整個駕駛過程由一個統一的神經網絡系統完成,從感知、決策到控制,所有步驟都融合在一起。這種方法不同于傳統的模塊化方法,在架構設計和實現方式上具有顯著的差異。2024年3月,特斯拉開始在北美地區大范圍推送FSD V12。這套端到端智駕系統表現優秀,讓從業者和用戶前所未有地感受到技術帶來的體驗提升,也使之成為端到端自動駕駛這一技術路線快速形成大范圍共識的最重要的推動力。
何為端到端自動駕駛?
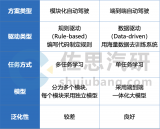
端到端自動駕駛解決方案是一種整體化、數據驅動的技術路徑,旨在簡化自動駕駛系統的架構設計。與傳統自動駕駛系統中的模塊化架構不同,端到端方法試圖通過一個統一的神經網絡系統,直接從傳感器輸入(如攝像頭、激光雷達等)到控制輸出(如方向盤轉動角度、油門和剎車力度)來完成整個駕駛過程。這種方法的核心思想是用深度學習模型取代傳統系統中的多個獨立模塊,通過大量數據的訓練,使得系統能夠自行學習、感知并做出決策。在端到端學習中,一般不需要明確地給出不同模塊或階段的功能,中間過程不需要人為干預。端到端學習的訓練數據為“輸入-輸出”的形式,無須提供其他額外信息。因此,端到端學習和深度學習一樣,都是要解決貢獻度分配問題。
1.傳統模塊化自動駕駛系統
傳統自動駕駛系統通常被分為以下幾個主要模塊:感知模塊:負責采集環境數據并識別道路、障礙物、行人等關鍵信息。感知模塊依賴于各種傳感器如攝像頭、激光雷達、雷達等,以及圖像處理和目標檢測算法。定位模塊:通過GPS、IMU(慣性測量單元)、地圖數據等手段,準確確定車輛在環境中的位置。路徑規劃模塊:基于感知和定位數據,規劃車輛行駛的最優路徑,并考慮交通規則、道路狀況等因素。決策模塊:決定車輛在行駛過程中應采取的具體動作,例如超車、避讓、減速等。控制模塊:執行決策模塊的指令,直接控制車輛的轉向、加速和制動。每個模塊各自獨立工作,負責不同的功能。模塊間的接口需要精心設計,以確保整個系統的協同工作。
2.端到端自動駕駛的實現
端到端自動駕駛系統試圖打破這種模塊化的限制,通過一個統一的神經網絡,直接從傳感器輸入生成控制輸出。在這種系統中:傳感器輸入:包括攝像頭、激光雷達、毫米波雷達等數據直接作為輸入。深度學習模型:通常是卷積神經網絡(CNN)、循環神經網絡(RNN)或其變種,負責從輸入數據中提取特征,進行環境感知、路徑規劃和決策,并最終生成車輛的控制指令。控制輸出:模型直接輸出車輛的控制命令,如方向盤角度、油門和剎車力度。在這個過程中,沒有明確的模塊劃分,也不包含任何人為設計的規則模塊。所有任務由一個統一的神經網絡系統完成。這種方法依賴于大規模的端到端訓練數據,通過訓練使模型學會駕駛。

3.端到端簡單理解
從理論上看,端到端較難理解,這里智駕最前沿以一個小故事,來給大家理解下端到端。在一個小島上有兩個村莊,分別叫感知村和執行村,感知村的村民一直都有給執行村的村民寫信的需求,但是這兩個村莊比較遠,需要送信員來傳遞村莊之間的信件。在起初的時候,信件的傳遞比較簡單,感知村的村民只是告知送信員這封信要給誰,但并沒有告知收件人住在執行村哪里,送信員在拿到信件來到執行村后,要挨家挨戶地去敲門,問他們是否就是收件人,在未將信交給收信人前,每個人都會拿信看一下,不僅讓信變褶皺了,有些信息也看不清了(人為地給了名稱規則,讓決策層去一個個校對,找到對應的規則并執行)。
由于這種信息傳遞的效率很低,且在執行村每多一戶人家,送信員就需要多敲一次門,且萬一出現收件人姓名未找到的情況(新的場景),送信員就無法處理了。為了解決這個問題,送信員決定開拓新的且統一的送信方式,那就是在給執行村送信時,順便將每一戶根據姓名標上戶號(大數據學習),當感知村的村民給執行村送信件時,送信員就會在信件上寫上對應戶號(指深度學習的過程,僅舉例,便于理解),當拿到信件后,只需要看信件上的戶號,找到對應的房子,就可以很快將信件送到了,這樣信件也不會破損,萬一遇到新的收件人,只需要再添加上戶號就可以了,這樣送信效率也更高了!雖然這個小故事不能很全面地概括端到端,但也可以簡單給大家理解下,端到端到底是什么意思,若有不正確的,還請大家在留言區交流。
端到端解決方案的優勢
1.簡化架構設計
降低復雜性:端到端系統將傳統的多模塊架構簡化為一個統一的深度學習模型,這顯著降低了系統的復雜性。傳統系統中,每個模塊都需要單獨開發、測試和調試,而端到端方法只需開發和訓練一個模型,簡化了開發過程。減少接口設計:在傳統系統中,各模塊之間需要精心設計接口,以確保數據的無縫傳遞和處理。而在端到端系統中,所有處理都是通過一個模型完成的,不再需要設計復雜的接口,減少了系統集成的難度。
2.減少人工干預
數據驅動:傳統系統中,許多功能需要依賴人工設定的規則和參數,例如目標檢測的閾值、路徑規劃的權重等。而端到端方法通過數據驅動,不再依賴人為的規則設定,而是通過大量真實數據的訓練,使模型自動學習處理不同的駕駛場景。自動優化:端到端系統在訓練過程中,能夠自動進行參數優化,減少了對人工調試的依賴。這使得系統能夠更好地適應復雜多變的駕駛環境,例如天氣變化、路況復雜的場景等。
3.潛在的性能提升
深度學習的強大能力:深度學習模型在圖像處理、模式識別等任務上表現出色,端到端系統能夠利用這種能力,直接從傳感器輸入中學習出高層次的特征,進而提升系統的整體性能。場景理解的提升:端到端系統能夠通過學習捕捉環境中的細微差別,例如行人行為、復雜交通狀況等,從而在某些復雜場景下表現出優于傳統方法的性能。
4.更強的適應性
持續學習:端到端系統可以通過持續學習和數據更新,適應新的道路條件和駕駛場景。這意味著系統在面臨新的駕駛環境時,可以通過引入新的數據進行再訓練,迅速調整以適應新情況。多樣性適應:由于端到端系統直接從數據中學習,它在面對不同地域、不同天氣、不同交通法規等情況下,能夠更靈活地調整自身的行為策略。
端到端解決方案的劣勢
1.高數據需求
大量數據需求:端到端系統的訓練需要大量的駕駛數據,這些數據不僅涵蓋多種駕駛場景,還需要包括各種異常情況和極端條件。這對企業的數據收集、處理和存儲能力提出了極高的要求。數據標注的復雜性:訓練端到端模型需要大量精確標注的數據,這一過程往往耗時且成本高昂。特別是在異常情況的數據采集和標注上,可能面臨更多挑戰。
2.黑箱問題
決策過程不透明:由于端到端系統依賴于深度學習模型,其決策過程難以解釋。這種“黑箱”特性導致系統的行為缺乏透明度,難以明確其在某些場景下為何做出特定決策。安全性與合規性挑戰:在實際應用中,端到端系統的不可解釋性可能帶來安全性和合規性方面的擔憂。例如,當系統發生錯誤時,難以明確責任歸屬,給事故分析和責任追究帶來了困難。
3.泛化能力不足
訓練數據的局限性:端到端系統的性能依賴于訓練數據的多樣性和覆蓋度。當系統遇到未曾見過的場景或條件時,可能無法做出正確的決策,表現出泛化能力不足的問題。應對新場景的挑戰:雖然端到端系統可以通過持續學習來適應新的場景,但在面對全新、極端或復雜場景時,其表現可能不如經過特別設計的模塊化系統。
4.難以處理復雜任務
單一模型的限制:端到端系統依賴于單一的神經網絡模型,這使得在處理高度復雜的任務時可能面臨性能瓶頸。例如,在處理多車道高速公路的交通場景或復雜的城市交叉路口時,單一模型可能無法勝任所有任務。場景復雜性增加:隨著駕駛場景的復雜性增加,端到端系統需要處理的變量也隨之增加,導致其在某些極端情況下的性能可能下降,甚至出現無法應對的情況。
端到端解決方案對自動駕駛行業的影響
1.推動技術創新
人工智能與自動駕駛的融合:端到端解決方案代表了人工智能技術在自動駕駛領域的深度應用。通過深度學習模型,系統能夠從數據中自主學習,擺脫了傳統算法的限制。這種方法的推廣,推動了更多創新算法和技術的出現,提升了自動駕駛系統的智能化水平。催生新技術路徑:隨著端到端方法的發展,可能會催生更多針對復雜駕駛任務的混合架構或增強型模型,例如結合傳統模塊化系統與端到端模型的混合架構,以克服單一模型的局限性。
2.改變研發范式
人才需求的轉變:端到端系統的開發更依賴于數據科學家和深度學習專家,而非傳統的工程師和領域專家。這種變化可能影響到整個自動駕駛行業的人才結構和培養方向,數據驅動的研發范式將變得更加重要。研發流程的變化:端到端方法的應用使得傳統的模塊化開發流程需要調整。企業可能需要重新設計其研發流程,以適應數據驅動的開發模式。這可能包括數據采集、標注、模型訓練和部署等環節的全面優化。
3.加速商用進程
特定場景下的快速落地:端到端系統在特定場景(如高速公路、封閉園區等)下可能比傳統方法更具優勢,因而有可能更快實現商用化。這種優勢可以幫助自動駕駛技術在早期階段取得市場份額,并進一步推廣至更廣泛的應用場景。商業模式的變革:隨著端到端方法的推廣,自動駕駛技術的商業模式可能也會發生變化。例如,基于數據的服務模式(如持續更新和優化的駕駛模型)可能成為新的商業方向。
4.挑戰法規和標準
法規適應性問題:由于端到端系統的黑箱特性,現有的自動駕駛法規和標準可能需要進行調整,以適應這種新的技術路徑。如何在保障安全性、透明性和可追責性的前提下,制定適合端到端系統的法規,是行業面臨的重大挑戰。標準化的困難:端到端方法的多樣性和高度依賴數據的特性,使得制定統一的行業標準變得更加復雜。標準化的難度可能會延緩技術的廣泛應用,并對行業的協調發展造成一定影響。
5.影響供應鏈和產業鏈
產業鏈的重新布局:端到端方法的推廣,可能減少對傳統模塊的依賴,進而影響現有自動駕駛產業鏈的結構。特別是那些專注于特定模塊的供應商,可能面臨重新定位的挑戰。新興企業的機會:端到端方法的普及可能為新興企業提供進入市場的機會,特別是那些在數據采集、處理、標注以及深度學習模型開發方面具備優勢的公司。
結論
端到端自動駕駛解決方案作為一種革新性技術路徑,展示了其在簡化系統架構、減少人工干預、提升性能和適應性等方面的巨大潛力。然而,端到端方法在實際應用中面臨高數據需求、黑箱問題、泛化能力不足以及處理復雜任務時的局限性等挑戰。這些問題表明,端到端解決方案尚未完全成熟,但其潛在的優勢依然吸引了大量的行業關注。隨著技術的不斷發展,端到端方法有望在更多的駕駛場景中得到應用,并對自動駕駛技術的商用化進程產生深遠影響。在未來的行業發展中,端到端解決方案可能成為推動自動駕駛技術進步的重要力量。然而,如何解決其固有的挑戰,并制定相應的法規和標準,仍是行業亟待解決的關鍵問題。面對這一新興技術路徑,自動駕駛行業必須在技術創新和法規制定之間找到平衡,以確保端到端方法能夠為未來的交通系統帶來真正的價值。這篇文章不僅探討了端到端自動駕駛解決方案的技術細節,還分析了其對行業的廣泛影響。隨著更多企業投入到端到端方法的研究和開發中,我們有理由期待這項技術在未來幾年內帶來更多的突破和應用。
審核編輯 黃宇
-
端到端
+關注
關注
0文章
28瀏覽量
10555 -
自動駕駛
+關注
關注
784文章
13812瀏覽量
166448 -
深度學習
+關注
關注
73文章
5503瀏覽量
121157
發布評論請先 登錄
相關推薦

端到端自動駕駛技術研究與分析
端到端在自動泊車的應用

爆火的端到端如何加速智駕落地?

從車企實踐看自動駕駛端到端解決方案

Waymo利用谷歌Gemini大模型,研發端到端自動駕駛系統
Mobileye端到端自動駕駛解決方案的深度解析

FPGA在自動駕駛領域有哪些應用?
理想汽車加速自動駕駛布局,成立“端到端”實體組織
智行者聯合清華完成國內首套全棧式端到端自動駕駛系統的開放道路測試

佐思汽研發布《2024年端到端自動駕駛研究報告》
理想汽車自動駕駛端到端模型實現

端到端自動駕駛的基石在哪里?

端到端自動駕駛的基石到底是什么?






 工商網監
工商網監
評論