

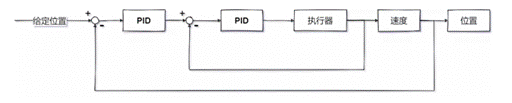
在雙閉環控制系統中,通常存在兩個控制環:內環和外環。內環主要負責快速響應和穩定系統,而外環則負責實現更高層次的控制目標。在進行PID調節時,通常需要先調整內環,然后再調整外環。以下是關于雙閉環PID調整的分析:
一、雙閉環控制系統的基本概念
- 雙閉環控制系統的定義
雙閉環控制系統是一種具有兩個反饋控制環的控制系統。它通常由一個內環和一個外環組成,內環負責快速響應和穩定系統,外環則負責實現更高層次的控制目標。 - 內環和外環的功能
內環主要負責對系統的動態性能進行控制,以實現快速響應和穩定。內環通常采用PID控制器,通過調節系統的輸入,使系統的輸出快速跟蹤給定的參考值。
外環主要負責對系統的穩態性能進行控制,以實現更高層次的控制目標。外環通常采用PI控制器,通過調節內環的設定值,使系統的輸出達到期望的穩態值。 - 雙閉環控制系統的優點
雙閉環控制系統具有以下優點:
(1)快速響應:內環可以快速響應系統的擾動,使系統迅速恢復穩定。
(2)穩定性好:內環可以有效地抑制系統的擾動,提高系統的穩定性。
(3)控制精度高:外環可以精確地控制系統的穩態性能,實現更高層次的控制目標。
二、雙閉環PID調整的原則
- 先調整內環
在雙閉環PID調整中,通常需要先調整內環。這是因為內環負責快速響應和穩定系統,其性能直接影響到整個控制系統的性能。通過調整內環的PID參數,可以使系統在面對擾動時具有更好的動態性能。 - 再調整外環
在外環調整中,需要根據內環的調整結果來設定外環的PID參數。外環的調整主要是為了實現更高層次的控制目標,如穩態誤差的減小、系統的調節時間的縮短等。 - 逐步調整
在雙閉環PID調整過程中,需要逐步進行。首先調整內環的PID參數,觀察系統的性能變化,然后根據內環的調整結果來調整外環的PID參數。通過逐步調整,可以確保系統在整個調整過程中保持穩定,避免出現過調和振蕩現象。
三、雙閉環PID調整的方法
- 內環PID參數的調整
(1)比例系數(Kp)的調整:比例系數決定了PID控制器對偏差的敏感程度。增大Kp可以提高系統的響應速度,但過大的Kp可能導致系統的過調和振蕩。因此,在調整Kp時,需要根據系統的實際情況進行逐步調整。
(2)積分系數(Ki)的調整:積分系數決定了PID控制器對偏差積分的敏感程度。增大Ki可以提高系統的穩態性能,減小穩態誤差。但過大的Ki可能導致系統的過調和振蕩。因此,在調整Ki時,需要根據系統的實際情況進行逐步調整。
(3)微分系數(Kd)的調整:微分系數決定了PID控制器對偏差變化率的敏感程度。增大Kd可以提高系統的抗擾動能力,減小系統的振蕩。但過大的Kd可能導致系統的響應速度降低。因此,在調整Kd時,需要根據系統的實際情況進行逐步調整。 - 外環PID參數的調整
(1)比例系數(Kp)的調整:在外環調整中,Kp的調整主要是為了減小系統的穩態誤差。增大Kp可以減小穩態誤差,但過大的Kp可能導致系統的過調和振蕩。因此,在調整Kp時,需要根據內環的調整結果進行逐步調整。
(2)積分系數(Ki)的調整:在外環調整中,Ki的調整主要是為了提高系統的穩態性能。增大Ki可以減小穩態誤差,提高系統的穩定性。但過大的Ki可能導致系統的過調和振蕩。因此,在調整Ki時,需要根據內環的調整結果進行逐步調整。 - 調整過程中的注意事項
(1)在調整過程中,需要密切觀察系統的性能變化,避免出現過調和振蕩現象。
(2)在調整過程中,需要根據系統的實際情況進行逐步調整,避免參數調整過快導致系統不穩定。
(3)在調整過程中,需要充分考慮系統的非線性、時變等特性,確保調整結果的準確性和可靠性。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
PID
+關注
關注
37文章
1477瀏覽量
86507 -
參數
+關注
關注
11文章
1865瀏覽量
32656 -
控制系統
+關注
關注
0文章
31瀏覽量
2740
發布評論請先 登錄
相關推薦
四軸飛行器的PID算法
同樣也會受到外界干擾,引入z軸加速度環可有效避免外界干擾造成的影響,增強了系統的魯棒性。 四軸飛行器雙閉環PID控制,如圖3、圖4所示。角度作為外環,角速度作為
發表于 01-15 17:03
基于雙閉環模糊PID控制器的開關電源控制的設計
的雙閉環控制律存在一定的缺陷,同時這一缺陷已經越來越無法適應集成電路工業對供電需求的發展。開關電源是一種非常典型的非線性系統,無法建立精確的模型。于此同時模糊PID雙
發表于 10-08 15:32
請問四軸的串級pid調試調內環候時外環pid參數如何設置?
四軸的串級pid調試,在調內環的時候,外環pid的三個參數是怎么設置?遙控器給的控制是給在外環上,那我現在要調節
發表于 08-06 03:56
基于BP神經網絡控制+Simulink雙閉環直流調速系統仿真設計
最近一個月的時間沒有更博,跟隨老師出差談項目了。前段時間學習了電機的智能控制,這次把設計好的基于BP神經網絡PID控制器應用于雙閉環直流調速系統。雙
發表于 06-28 12:03
關于三重閉環PID如何調節問題,請教各位如何能夠快速準確調節成功呢?
PID調節是否調節成功后輸入和輸出偏差是否應該接近0呢?自己三閉環調節總有一個偏差不接近0。多重PID調節應該如何調呢?比如先從外環還是
發表于 07-30 09:58
PID調節外環PID調節外環
一、PID調節外環:ATC_ANG_PIT_P 俯仰軸角度控制器P增益ATC_ANG_RLL_P 滾動軸角度控制器P增益ATC_ANG_YAW_P 航向軸角度控制器P增益內環
發表于 09-17 06:25

串級pid內環和外環怎么確定
在控制系統中,串級PID控制器是一種常見的控制策略,它通過將兩個PID控制器串聯起來,實現對系統的精確控制。串級PID控制器由內環和外環組成





 工商網監
工商網監

評論