 電動汽車真的需要三電機甚至四電機嗎?
電動汽車真的需要三電機甚至四電機嗎?
電子發燒友網報道(文/梁浩斌)比亞迪的四電機易四方技術平臺在仰望U8和U9上首發后,8月20日,三電機的易三方平臺在騰勢Z9系列上首發亮相。易三方借助三電機的配置,可以實現超高角度的后輪轉向,極小的轉彎半徑,以及“圓規掉頭”等傳統車型無法實現的駕駛模式。
類似易四方、易三方的技術,是分布式驅動的一種形式,近幾年分布式驅動受到電動汽車廠商關注,一些廠商的分布式驅動技術已經實現量產上車,還有更多廠商以及Tier1展出了相關的電驅系統,或是在預研階段。業界普遍認為,分布式驅動是未來電動汽車的主要驅動解決方案之一。
分布式電驅,提高驅動效率的方式之一
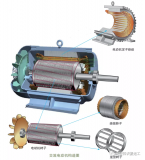
一般的乘用電動汽車搭載一到兩個電機,采用集中式電驅方案,單個電機放在前軸或后軸,抑或是前后軸各一個電機,電機通過傳動系統(減速器、差速器、傳動軸等組成的驅動橋)將動力傳遞至兩側的驅動輪上。
集中式電驅方案,顧名思義其中一個優勢就是集成度較高,整車可以只需要一個較高功率的電機就可以為整個車輛提供動力,同時電機、逆變器、減速器等部件集成在一個緊湊模塊中,可以給座艙騰出更大的空間。
除此之外,集中式電驅與傳統的燃油車相比,在傳動系統設計上基本通用,技術成熟度較高,可以降低整體的開發難度,也具有一定的成本優勢。但顯然,盡管單個電機的效率很高,但通過傳動軸等傳動系統輸出動力到兩邊的驅動輪,動力傳遞路徑較長,相對分布式電驅來說還是會存在較高的機械傳動損耗,且動力輸出的靈活性相對較低。
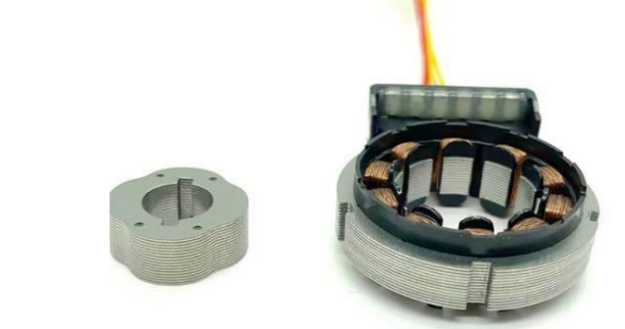
分布式電驅,可以理解通過增加電機數量至三到四個,令電機布局更加靠近驅動輪,甚至是直接安裝在驅動輪內部。所以分布式電驅的兩種主要技術路線包括:相比集中式電驅,電機位置更靠近驅動輪的輪邊電機,驅動電機直接安裝在驅動輪旁邊,通過半軸或減速器與驅動輪相連;另外一種是采用輪轂電機,驅動電機直接在驅動輪內部,直接驅動或是通過內置的減速器來驅動車輪。
一個顯而易見的優勢是,分布式電驅可以令電機獨立控制每個驅動輪。比如四電機的分布式電驅系統中,每一個驅動輪都由單獨的電機進行控制,這意味著更加容易實現整車的扭矩矢量控制,可以實時調整每個車輪的扭矩分配,大幅提高車輛的操控性和穩定性。
同時這種特性也能給車輛帶來一些前所未有的功能,四個驅動輪完全依靠電子控制系統來控制四個電機的轉速和轉向,無需機械差速器,甚至可以各自以不同的方向轉動。比如仰望U8,奔馳EQG、極氪001FR等就采用了四電機的分布式電驅,實現兩側驅動輪反向轉動實現360°原地掉頭。
騰勢Z9系列上采用了三電機的分布式電驅,即前輪由單個電機驅動,后輪由兩個電機各自驅動,通過兩側后輪反向轉動實現“圓規掉頭”。
在傳動效率上,分布式電驅由于相比集中式電驅減少了部分機械傳動的損失,驅動效率也會更高。
分布式電驅的技術難點
相比集中式電驅,分布式電驅的技術也存在較大的難點。比如在車輛過彎時,由于車輛寬度會造成左右兩側的線速度不同,為了行駛穩定,左右兩側車輪在過彎時必然存在轉速差,外側輪轉速較快,內側輪轉速較慢。傳統的單軸驅動汽車,在車輛過彎時可以通過差速器,來吸收左右輪的轉速差,使車輛更穩定可控。
這里的難點主要是電子差速以及如何通過傳感器等保證四輪轉速的一致。由于車輛在路面行駛的狀況復雜,在控制算法、技術路線上也較為多樣且復雜。在四電機系統中,四輪差速控制可以有兩種方式實現,一是以汽車左前輪轉速作為標定車速,調節其他三個車輪轉速,四個車輪繞轉向中心同角度旋轉從而實現差速;二是基于前軸整體轉向設計四輪差速控制系統,控制器通過調節四個車輪轂電機的轉速來實現差速,其獨到之處在于當電動汽車轉彎時,整個前軸可繞前軸中心整體旋轉一定的角度。
另一方面如何確保直線高速行駛時保持四個輪速的一致,也需要傳感器、電機控制等具備極高的精度以及極低的響應延遲。
目前已經推出的一些分布式電驅方案
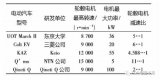
三電機的車型實際上出現得較早,相關的方案也相對成熟,最早的是奧迪推出的ATA250,官方稱其為電氣解耦型分布式輪邊電機驅動,將兩個輪邊電機水平對置,兩個電機分別控制兩側的驅動半軸,同時兩側各配備了減速器,以及獨立的逆變器和控制器。ATA250被應用到奧迪E-tron S車型后軸上,兩個400V電機共提供276kW的功率。
從目前的方案來看,三電機以及四電機的分布式電驅中,后軸的電機基本都采用雙同軸結構,也就是電機背靠背水平對置。這是由于后軸橫向空間較大,足夠容納水平對置的雙電機,同時也可以盡可能降低對座艙的空間影響。
但在前軸上,由于需要容納轉向機構,前輪轉向機構需要前軸預留一定的橫向空間,于是橫向空間不足的情況下,還要容納兩臺輪邊電機,就需要將兩臺電機平行布置了,這也被稱為平行軸式雙電機電驅動。
比如采用四電機的極氪001FR,在前軸上就采用了一套雙電機平行軸分布式電驅動將兩臺155kW的電機轉子平行布置集成到電驅模塊中,實現前軸輸出高達310kW。
當然也有在前軸上用雙同軸結構的雙電機布局,比如仰望U8。仰望U8上的前軸電驅系統采用雙同軸水平布置,但減速器的結構從兩側變成從中間延伸出,兩組減速器并排緊貼著。這樣的布局雖然降低了電驅系統的橫向長度,但大大增加了縱向高度,因此只能在大型SUV上應用。
目前在性能型電動車上,已經有多款車型搭載三電機的分布式電驅,包括保時捷Taycan Turbo GT、奧迪E-Tron S、特斯拉Model S Plaid、騰勢Z9系列、Lucid Air Sapphire等;四電機則有仰望U8/U9、極氪001FR、猛士917、Rimac Nevera、Rivian R1系列、悍馬EV等。
分布式電驅也有多家車企以及Tier1已經推出,比如奇瑞、長安在今年北京車展上就展示過分布式電驅系統,另外華為、匯川、綠傳、精進、馬瑞利、舍弗勒等Tier1也已經有分布式電驅產品或技術展示。
小結:
分布式電驅作為未來電動汽車的發展方向之一,目前依然成本較高,僅在一些高端車型上實現量產。不過我們也看到越來越多的廠商展出相關產品和技術,隨著集成化帶來的成本下降,以及控制算法等應用的成熟,相信在電動汽車產業的高速發展期,分布式電驅很快會實現技術普惠,下放到更多車型上。
類似易四方、易三方的技術,是分布式驅動的一種形式,近幾年分布式驅動受到電動汽車廠商關注,一些廠商的分布式驅動技術已經實現量產上車,還有更多廠商以及Tier1展出了相關的電驅系統,或是在預研階段。業界普遍認為,分布式驅動是未來電動汽車的主要驅動解決方案之一。
分布式電驅,提高驅動效率的方式之一
一般的乘用電動汽車搭載一到兩個電機,采用集中式電驅方案,單個電機放在前軸或后軸,抑或是前后軸各一個電機,電機通過傳動系統(減速器、差速器、傳動軸等組成的驅動橋)將動力傳遞至兩側的驅動輪上。
集中式電驅方案,顧名思義其中一個優勢就是集成度較高,整車可以只需要一個較高功率的電機就可以為整個車輛提供動力,同時電機、逆變器、減速器等部件集成在一個緊湊模塊中,可以給座艙騰出更大的空間。
除此之外,集中式電驅與傳統的燃油車相比,在傳動系統設計上基本通用,技術成熟度較高,可以降低整體的開發難度,也具有一定的成本優勢。但顯然,盡管單個電機的效率很高,但通過傳動軸等傳動系統輸出動力到兩邊的驅動輪,動力傳遞路徑較長,相對分布式電驅來說還是會存在較高的機械傳動損耗,且動力輸出的靈活性相對較低。
分布式電驅,可以理解通過增加電機數量至三到四個,令電機布局更加靠近驅動輪,甚至是直接安裝在驅動輪內部。所以分布式電驅的兩種主要技術路線包括:相比集中式電驅,電機位置更靠近驅動輪的輪邊電機,驅動電機直接安裝在驅動輪旁邊,通過半軸或減速器與驅動輪相連;另外一種是采用輪轂電機,驅動電機直接在驅動輪內部,直接驅動或是通過內置的減速器來驅動車輪。
一個顯而易見的優勢是,分布式電驅可以令電機獨立控制每個驅動輪。比如四電機的分布式電驅系統中,每一個驅動輪都由單獨的電機進行控制,這意味著更加容易實現整車的扭矩矢量控制,可以實時調整每個車輪的扭矩分配,大幅提高車輛的操控性和穩定性。
同時這種特性也能給車輛帶來一些前所未有的功能,四個驅動輪完全依靠電子控制系統來控制四個電機的轉速和轉向,無需機械差速器,甚至可以各自以不同的方向轉動。比如仰望U8,奔馳EQG、極氪001FR等就采用了四電機的分布式電驅,實現兩側驅動輪反向轉動實現360°原地掉頭。
騰勢Z9系列上采用了三電機的分布式電驅,即前輪由單個電機驅動,后輪由兩個電機各自驅動,通過兩側后輪反向轉動實現“圓規掉頭”。
在傳動效率上,分布式電驅由于相比集中式電驅減少了部分機械傳動的損失,驅動效率也會更高。
分布式電驅的技術難點
相比集中式電驅,分布式電驅的技術也存在較大的難點。比如在車輛過彎時,由于車輛寬度會造成左右兩側的線速度不同,為了行駛穩定,左右兩側車輪在過彎時必然存在轉速差,外側輪轉速較快,內側輪轉速較慢。傳統的單軸驅動汽車,在車輛過彎時可以通過差速器,來吸收左右輪的轉速差,使車輛更穩定可控。
這里的難點主要是電子差速以及如何通過傳感器等保證四輪轉速的一致。由于車輛在路面行駛的狀況復雜,在控制算法、技術路線上也較為多樣且復雜。在四電機系統中,四輪差速控制可以有兩種方式實現,一是以汽車左前輪轉速作為標定車速,調節其他三個車輪轉速,四個車輪繞轉向中心同角度旋轉從而實現差速;二是基于前軸整體轉向設計四輪差速控制系統,控制器通過調節四個車輪轂電機的轉速來實現差速,其獨到之處在于當電動汽車轉彎時,整個前軸可繞前軸中心整體旋轉一定的角度。
另一方面如何確保直線高速行駛時保持四個輪速的一致,也需要傳感器、電機控制等具備極高的精度以及極低的響應延遲。
目前已經推出的一些分布式電驅方案
三電機的車型實際上出現得較早,相關的方案也相對成熟,最早的是奧迪推出的ATA250,官方稱其為電氣解耦型分布式輪邊電機驅動,將兩個輪邊電機水平對置,兩個電機分別控制兩側的驅動半軸,同時兩側各配備了減速器,以及獨立的逆變器和控制器。ATA250被應用到奧迪E-tron S車型后軸上,兩個400V電機共提供276kW的功率。
從目前的方案來看,三電機以及四電機的分布式電驅中,后軸的電機基本都采用雙同軸結構,也就是電機背靠背水平對置。這是由于后軸橫向空間較大,足夠容納水平對置的雙電機,同時也可以盡可能降低對座艙的空間影響。
但在前軸上,由于需要容納轉向機構,前輪轉向機構需要前軸預留一定的橫向空間,于是橫向空間不足的情況下,還要容納兩臺輪邊電機,就需要將兩臺電機平行布置了,這也被稱為平行軸式雙電機電驅動。
比如采用四電機的極氪001FR,在前軸上就采用了一套雙電機平行軸分布式電驅動將兩臺155kW的電機轉子平行布置集成到電驅模塊中,實現前軸輸出高達310kW。
當然也有在前軸上用雙同軸結構的雙電機布局,比如仰望U8。仰望U8上的前軸電驅系統采用雙同軸水平布置,但減速器的結構從兩側變成從中間延伸出,兩組減速器并排緊貼著。這樣的布局雖然降低了電驅系統的橫向長度,但大大增加了縱向高度,因此只能在大型SUV上應用。
目前在性能型電動車上,已經有多款車型搭載三電機的分布式電驅,包括保時捷Taycan Turbo GT、奧迪E-Tron S、特斯拉Model S Plaid、騰勢Z9系列、Lucid Air Sapphire等;四電機則有仰望U8/U9、極氪001FR、猛士917、Rimac Nevera、Rivian R1系列、悍馬EV等。
分布式電驅也有多家車企以及Tier1已經推出,比如奇瑞、長安在今年北京車展上就展示過分布式電驅系統,另外華為、匯川、綠傳、精進、馬瑞利、舍弗勒等Tier1也已經有分布式電驅產品或技術展示。
小結:
分布式電驅作為未來電動汽車的發展方向之一,目前依然成本較高,僅在一些高端車型上實現量產。不過我們也看到越來越多的廠商展出相關產品和技術,隨著集成化帶來的成本下降,以及控制算法等應用的成熟,相信在電動汽車產業的高速發展期,分布式電驅很快會實現技術普惠,下放到更多車型上。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
電動汽車
+關注
關注
156文章
12085瀏覽量
231242 -
電機
+關注
關注
142文章
9019瀏覽量
145468 -
逆變
+關注
關注
2文章
82瀏覽量
30413
發布評論請先 登錄
相關推薦
車載充電機測試系統:確保電動汽車充電的關鍵環節
隨著電動汽車的日益普及,車載充電機作為電動汽車充電的關鍵設備,其性能和可靠性至關重要。車載充電機測試系統的出現,為保障車載充電機的質量提供了
電動汽車驅動電機的工作模式
隨著全球對環境保護和可持續發展的重視,電動汽車(EV)作為一種清潔、高效的交通工具,正逐漸受到人們的青睞。電動汽車的核心部件之一是其驅動電機,它直接決定了車輛的動力性能、續航能力以及駕駛體驗。本文將詳細介紹
電機仿真丨六相永磁同步電機實時仿真
傳動。隨著近些年新能源汽車行業的火爆,電動汽車的安全可靠性尤為重要。這就需要電動汽車的驅動系統具有一定的容錯能力。而多相電機恰好有著高冗余和
發表于 04-26 15:43
直線電機助力的電動汽車在緬甸市場擴大
直線電機助力的電動汽車在緬甸市場擴大。近日,緬甸交通和通信部公布的最新數據顯示,從2023年1月取消電動汽車進口關稅以來,緬甸電動汽車市場持續擴大,2023年該國
電動汽車用車載充電機OBC的構造與原理
車載充電機是指固定安裝在電動汽車上的充電機,以交流電源作為輸入,輸出為直流電,為汽車動力電池充電,實現電動汽車動力電池的安全自動充電。關于車
芯熾科技 電動汽車電機控制傳感器可使用SC2161,兼容AD2S1210
新能源電動汽車在運行過程中需要傳感器進行電機和剎車的監控,無刷電動機沒有換向機構,需要位置傳感器來測試電
電動汽車充電系統組成和原理
電動汽車充電系統的主要作用是將外部電源供給的電能轉化為電動汽車電池能夠接受的電能,并將電能存儲到電池中,以供電動汽車驅動電機運行。
發表于 02-19 17:01
?2171次閱讀
三菱電機將推出用于各種電動汽車的新型J3系列功率半導體模塊
三菱電機集團近日(2024年1月23日)宣布即將推出六款用于各種電動汽車(xEV)的新型J3系列功率半導體模塊,

新能源電動汽車非車載充電機和車載充電機OBC的區別
車載充電機(On Board Charger,OBC)是指固定安裝在電動汽車上的充電機,其主要功用是為電動汽車的動力電池安全、快速、便捷地充滿電。它通過插頭和電纜與交流插座連接,優點是
輪轂電機驅動系統在電動汽車上的應用
電動汽車的驅動方案主要有傳統的集中電機驅動以及輪轂電機驅動兩種方式,其中傳統的集中電機驅動方式主要以內燃氣汽車為基礎,采用集中
發表于 01-12 09:32
?845次閱讀
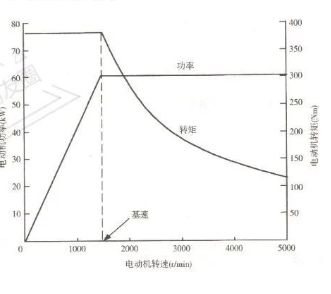
汽車驅動電機的特性
汽車驅動電機是電動汽車的核心部件,它將電能轉換為機械能,驅動汽車行駛。隨著全球能源危機和環境污染問題日益嚴重,電動汽車作為一種清潔、高效的交
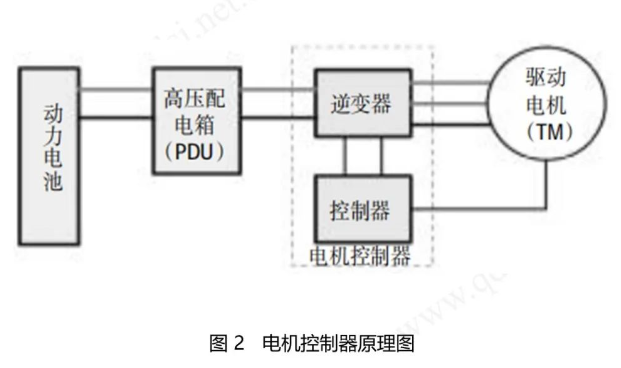
電動汽車電機控制器控制原理介紹
電動汽車電機控制器是電動汽車的核心部件之一,它的主要功能是根據駕駛員的操作和汽車的運行狀態,對電動汽車電機控制器是電動汽車的核心部件之一,它





 工商網監
工商網監
評論