 雅特力電機應用快速入門指南
雅特力電機應用快速入門指南
目標電機:
控制模式:
- 可執行有位置感測器/無位置感測器FOC弦波矢量控制
- 可執行有位置感測器/無位置感測器120°方波BLDC電機控制
三相PWM調制模式:
- SVPWM
- 120°導通PWM控制
相電流檢測模式:
自動調試功能:
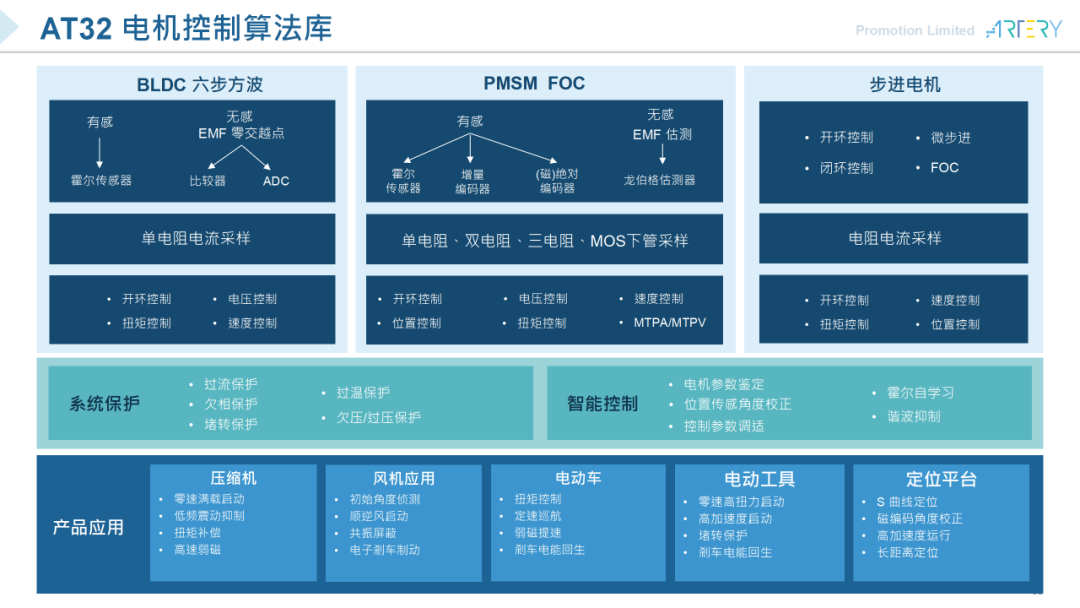
圖1. AT32電機控制算法庫
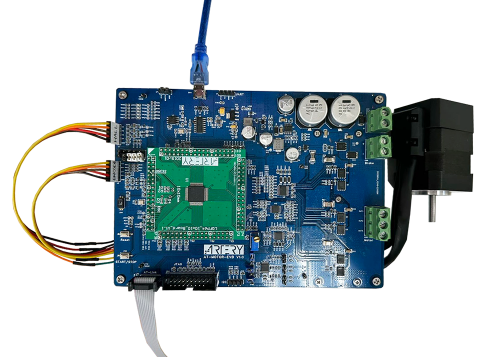
電機開發板AT-MOTOR-EVB
AT-MOTOR-EVB電機開發板,是一個泛用型的低壓三相電機驅動控制板,可適配AT32F413、AT32F415、AT32F425、AT32F421、AT32L021、AT32F423、AT32F455等系列的Sub小板,搭配雅特力電機函數庫,PMSM(BLDC)電機,AT-Link或第三方調試下載器使用,可驅動直流無刷電機、交流同步電機,以及異步電機。
相關硬件配置可參考UM0011低壓電機控制開發板使用手冊。
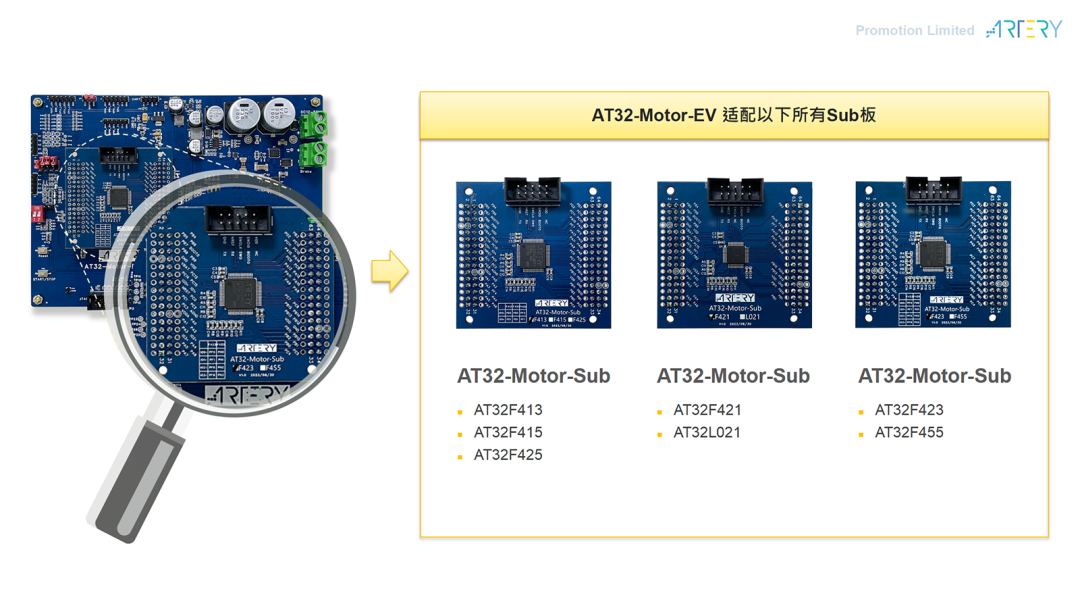
圖2. AT-MOTOR-EVB適配Sub板
電機開發軟件
雅特力提供多模式完整電機庫,配置免費的電機監控上位機調試軟件,友好的電機監控和調試軟件UI界面,可實時監看電機運轉參數、狀態與動態顯示響應波形,便于進行在線調試相關控制參數,滿足工程人員開發需求,提升電機控制產品上市進程。
軟件環境準備
- 開啟相應范例工程AT32F4xx_MC_Library_Project\motor_evb_2v0\at32f4xx
- 電機應用PC軟件ArteryMotorMonitor.exe(本軟件不需安裝,只需直接運行可執行程序)
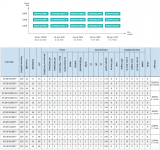
- Keil的配置需根據各個AT32 MCU的閃存存儲大小修改Options中的Read/Only MemoryAreas,詳細參照下表1,例:AT32F413RCT7的閃存存儲大小為256K字節,則其IROM1的起始位置為0x8000000,大小為0x3F800,其IROM2的起始位置為0x803F800,大小為0x800。AT32F413RCT7的修改范例如下圖3所示;AT32 IDE的配置需根據各個AT32 MCU的閃存存儲大小修改Id文件如下圖4所示。
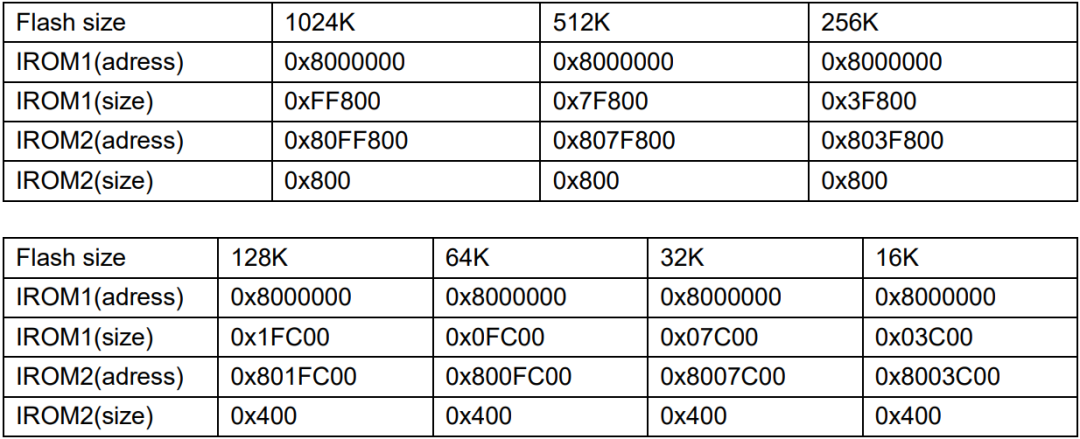
表1. 對應閃存存儲空間ROM配置表
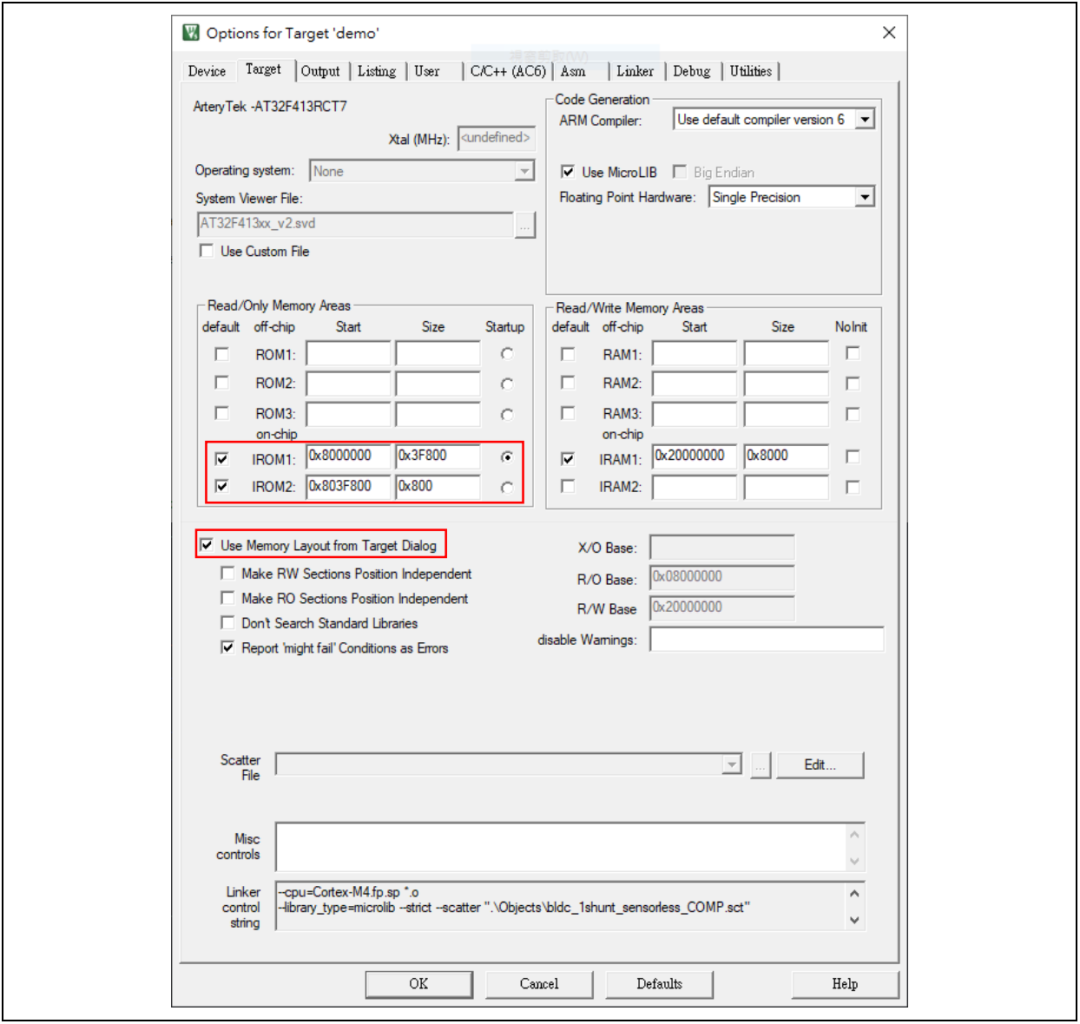
圖3.AT32F413RCT7 ROM配置(Keil)
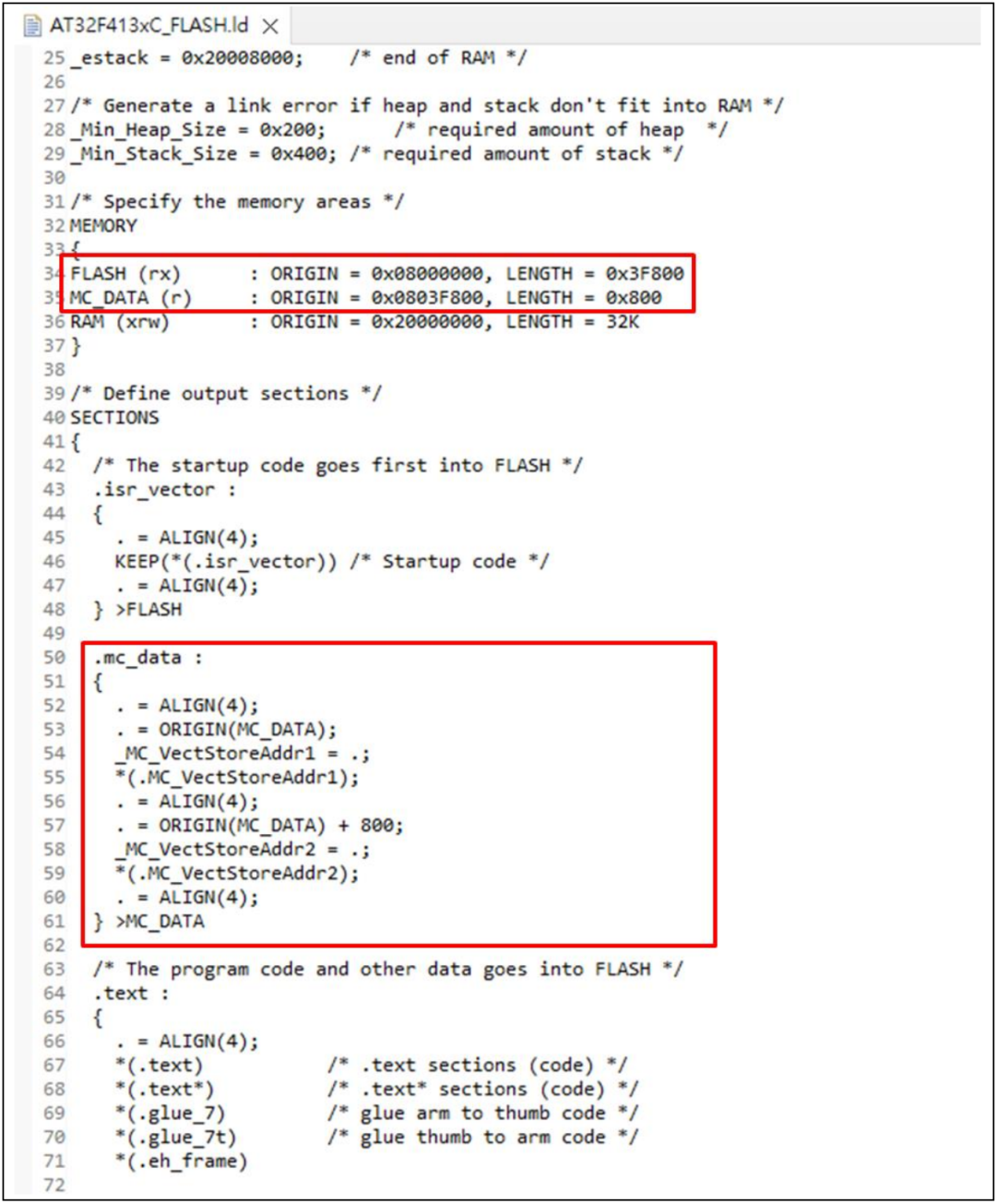
圖4.AT32F413RCT7 ROM配置(AT32 IDE)
快速上手操作指南
*不同的電機控制方式,調試的流程和項目可能會有差異
修改電機控制模式及參數
- 在電機庫文檔中的motor_control_drive_param.h內提供用戶自行輸入電機控制模式、電機參數、控制板參數、控制器參數。
- 模式宏定義基于用戶的硬件與電機特性,可定義適當的模式,宏定義設定步驟可參考Quick Start Guide(快速入門指南)。
建立連接
在確保完成硬件準備和軟件環境準備后,我們可以進行以下操作建立上位機監控與調試軟件與控制版的連接。詳細電機UI(電機監控與調試軟件)使用說明請參照AN0063文檔。
參數自動鑒定
參數自動鑒定分為兩部分,分別為電機線圈參數自動辨識、電流PI控制參數自定義。若已有電機RS_LL以及LS_LL參數則不需進行電機線圈參數自動辨識,可以直接修改motor_control_drive_param.h文件內的宏定義RS_LL以及LS_LL。
電機線圈參數自動辨識:
STEP-1.在motor_control_drive_param.h文件內,填入電機額定電流(NOMINAL_CURRENT)宏定義并重新編譯燒錄代碼,如下圖5所示。
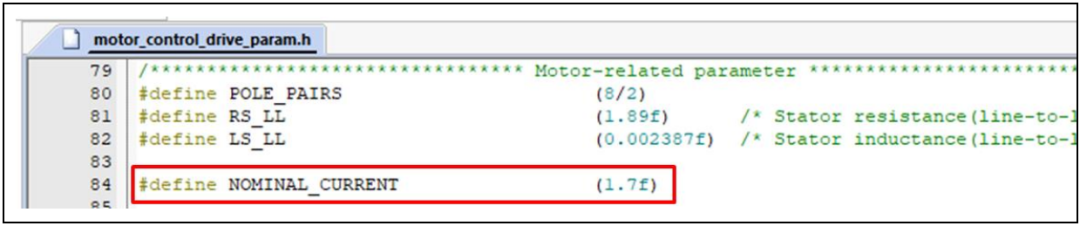
圖5.電機額定電流宏定義
STEP-2.使用UI電機調試軟件,切換到Auto Tune頁面,在狀態機的狀態為safty ready時按下Identify Winding parameter按扭即執行電機線圈參數自動辨識,如下圖6所示。
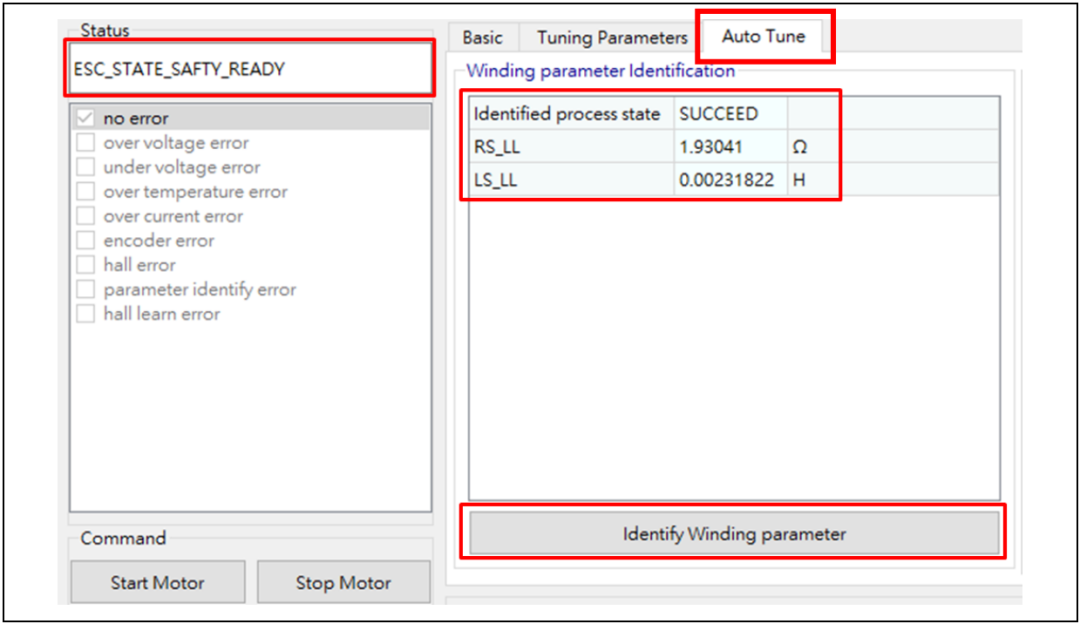
圖6.電機線圈參數自動辨識
STEP-3.Identified process state回報是否成功(SUCCEED)并獲得RS_LL以及LS_LL參數并將數值填入motor_control_drive_param.h文件宏定義RS_LL以及LS_LL參數并重新編譯燒錄代碼,如下圖7所示。

圖7.電機線圈參數宏定義
電流PI控制參數自定義:
STEP-1.在motor_control_drive_param.h文件內,填入輸入電源DC電壓(VDC_RATED)宏定義并重新編譯燒錄代碼,如下圖8所示。

圖8.電機額定電壓
STEP-2.切換到Auto Tune頁面,在狀態機的狀態為safty ready時按下UI軟件的Auto-tune Current PI parameter按扭即執行電流PI控制參數自定義,完成后會自動更新Q軸以及D軸電流的PI控制參數,如下圖9所示。
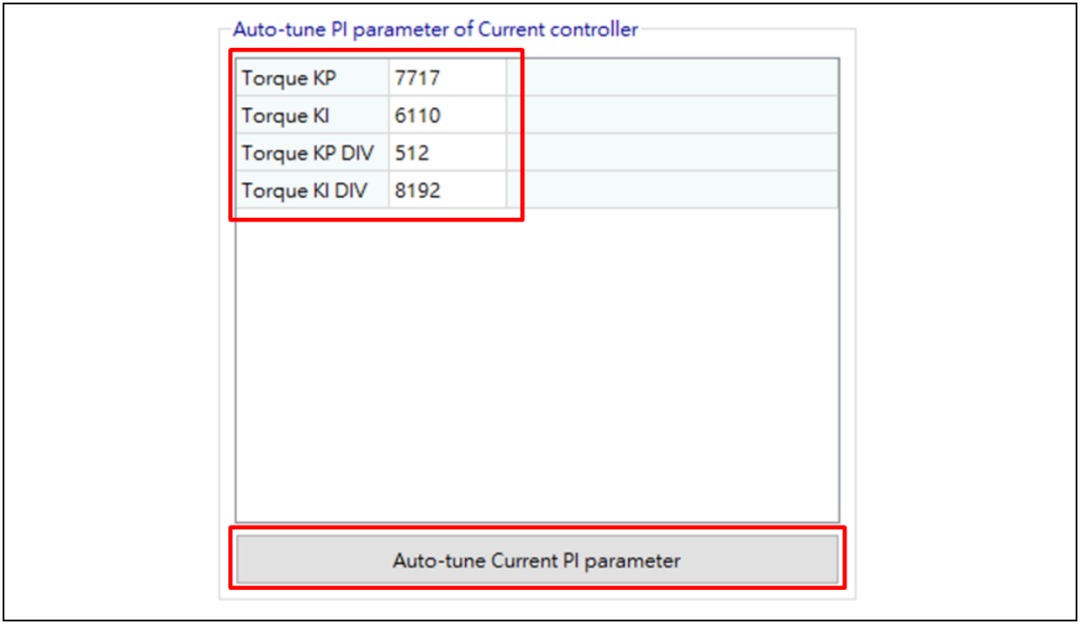
圖9.電流PI控制參數自定義
STEP-3.將上圖9顯示的參數填回宏定義(motor_control_drive_param.h)并重新編譯燒錄代碼,如下圖10。
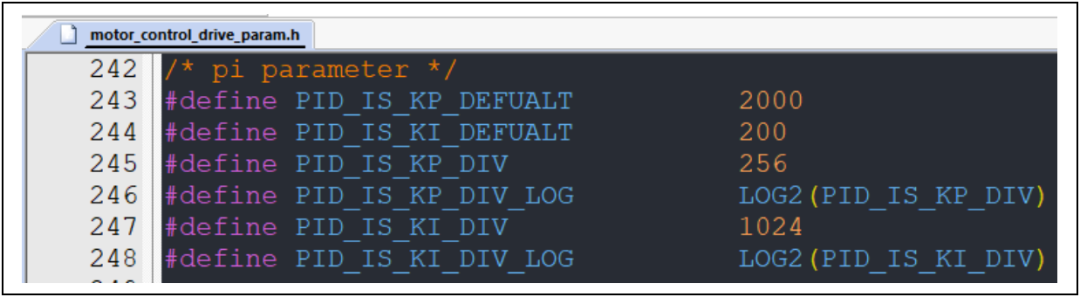
圖10.電流PI控制參數宏定義
Q軸電流調試
此模式下會產生一個步階的電流,如下圖11,可以調整步階電流的相關參數,產生步階電流的目的是為了查看調整Q軸電流的PID電流環參數后的電流響應。
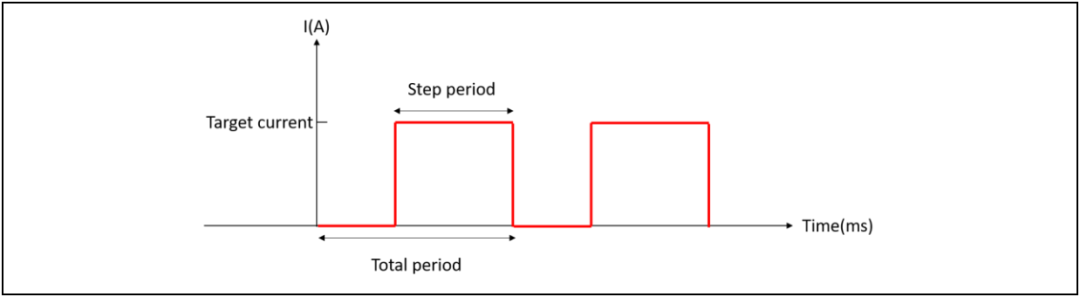
圖11.步階電流示意圖
詳細操作步驟如下:
STEP-1.將控制模式下拉菜單選為IQ tune 圖12.控制模式選取IQ電流環調試
圖12.控制模式選取IQ電流環調試
STEP-2.切換到Tuning Parameters頁面,設置PID參數以及步階電流參數,初次調整可以使用電流PI控制參數自定義后的參數,如電流響應不如預期在進行調整,如下圖13
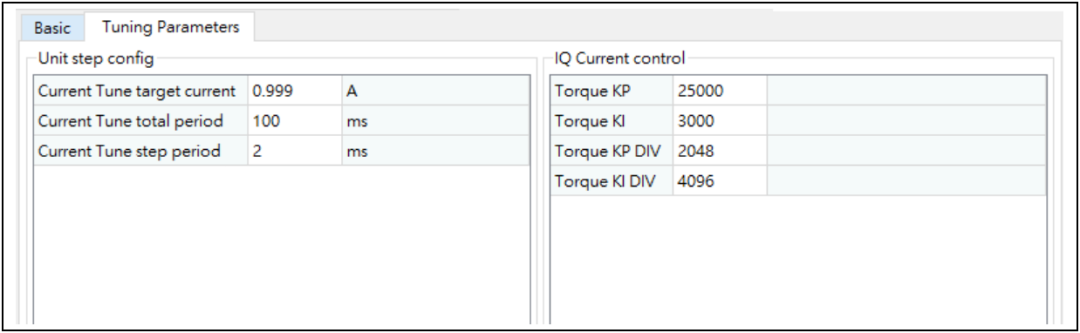
圖13.PID參數以及步階電流參數
STEP-3.按下啟動電機(Start Motor)按紐
STEP-4.調整繪圖區的參數監控為Torque reference(Iq)以及Torque measured(Iq)并按下Save鍵
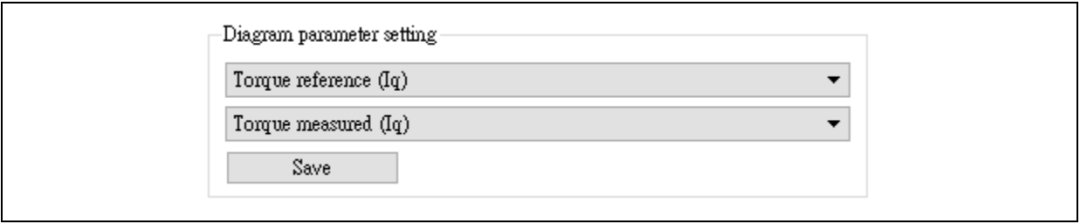
圖14.調整通道監控參數(IQ電流環調試)
STEP-5.點選繪圖紐即可呼叫出波形窗口,波形制圖控制按鈕詳細說明可參考AN0063AT32Motor Monitor Application Note
STEP-6.查看電流響應是否如預期,如下圖15,若不如預期則按下停止電機,并重復STEP-2~STEP6
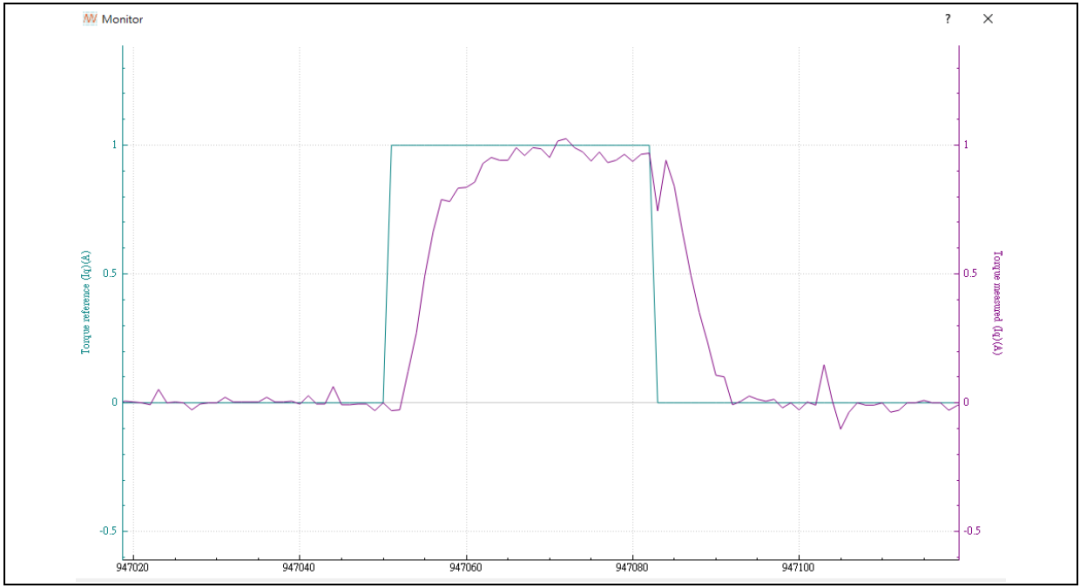
圖15.電流環調試波型
STEP-7.微調完成后將參數填回宏定義(motor_control_drive_param.h)并重新編譯燒錄代碼,如下圖16。
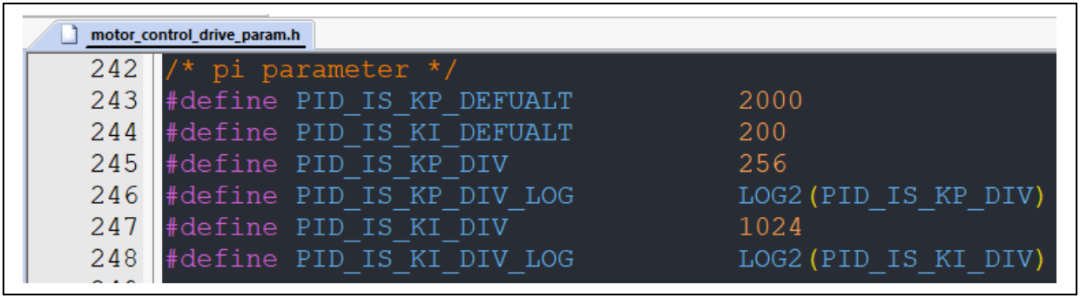
圖16.電流PI控制參數宏定義
外部/軟件命令控制
本范例工程支持兩種控制來源,包含外部電壓控制以及軟件控制,外部電壓控制為通過外部的電壓調整速度或轉矩的大小,在本低壓電機控制開發板為調整紅框處的電位器來控制命令值的大小,電位器為逆時針轉動電壓會遞增,軟件控制則為直接輸入速度或轉矩命令值來控制,本范例工程初始設定默認為軟件控制模式。
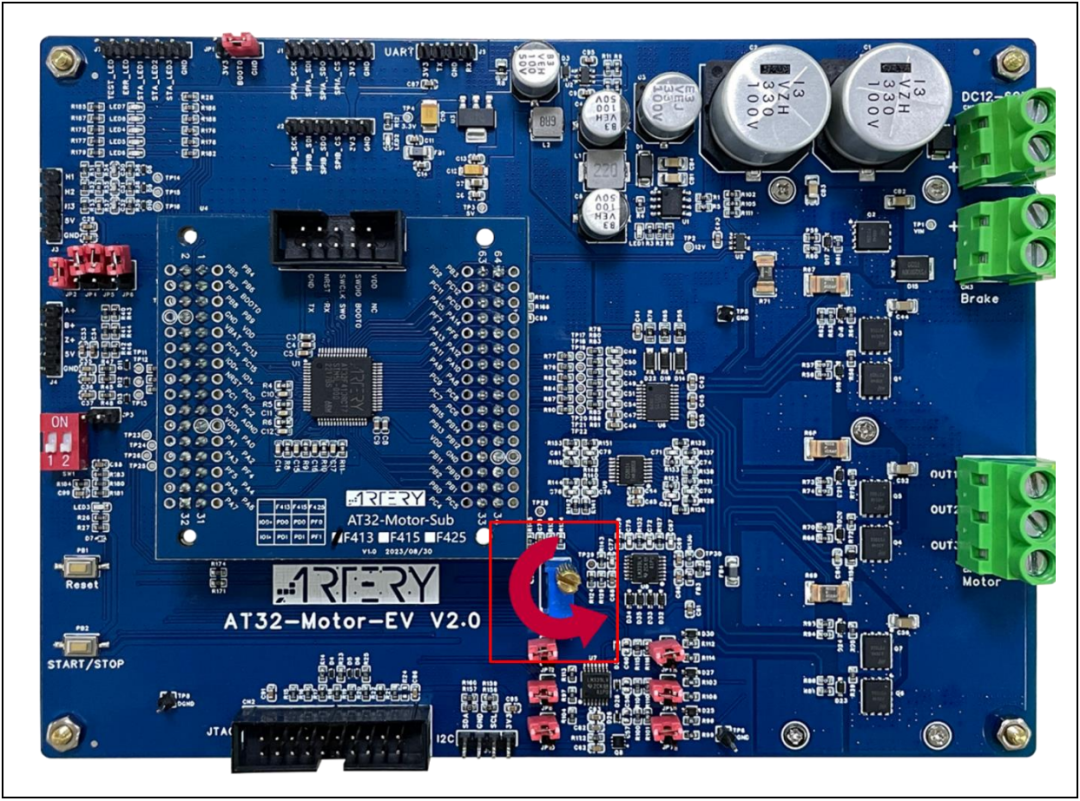
圖17.電位器位置圖(外部電壓控制來源)
控制來源可以直接修改程序定義或是通過電機應用PC軟件來做修改,程序定義值于motor_control_drive_param.h文檔內的CTRL_SOURCE,如下圖18。通過PC軟件修改的修改方式詳見下圖19,且根據用戶選擇不同的控制模式會對應不同的控制參數,若為速度控制模式時則會顯示目標速度的控制欄位,如下圖19,若選擇轉矩控制則會有目標轉矩電流的控制欄位,如下圖20。
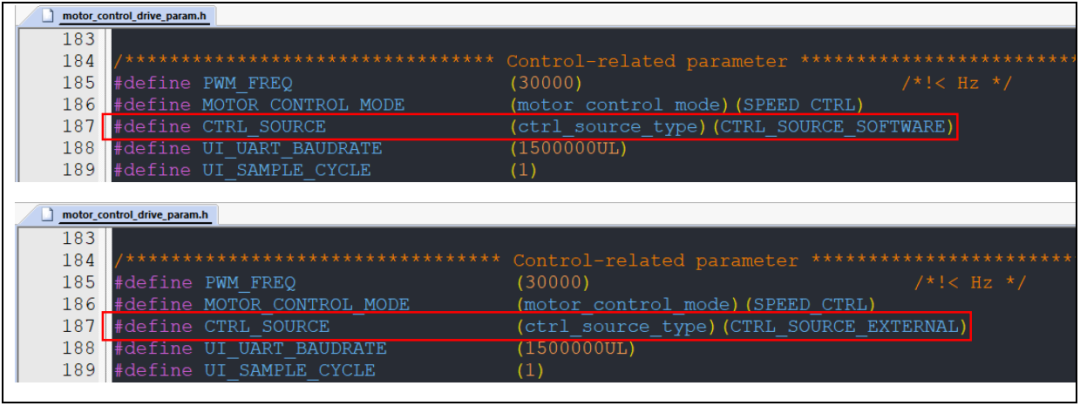
圖18.控制來源定義值(軟件控制來源(上)/外部電壓控制(下))
1) 外部電壓控制來源
在來源選擇的下拉菜單中若選擇external voltage control則可以切換到外部來源控制,可通過外部的電壓調整速度或轉矩的大小,目標速度或目標轉矩的欄位將會顯示目前控制電壓下所換算的控制速度或轉矩大小。注意:外部來源控制模式下本欄位不可修改。
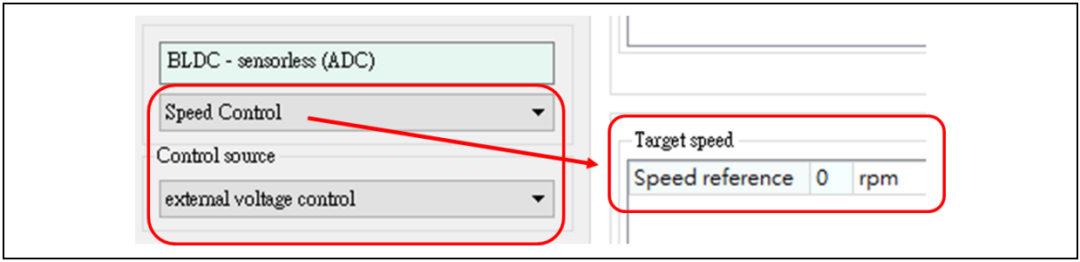
圖19.速度控制模式(外部電壓控制來源)
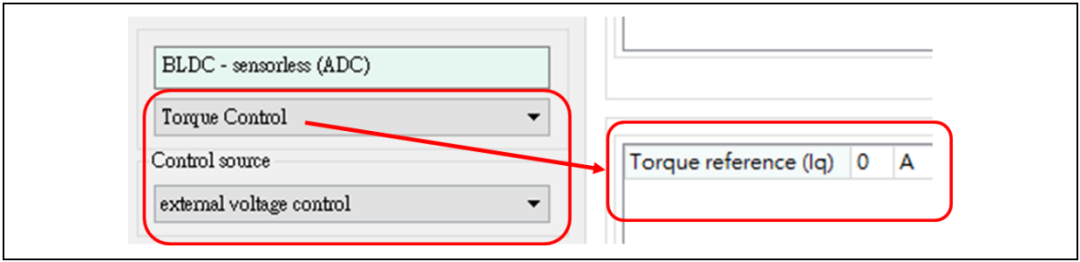
圖20.轉矩控制模式(外部電壓控制來源)
2) 軟件控制來源
默認為軟件控制模式,來源選擇的下拉菜單中選擇Software control也可切換至軟件控制模式,如下圖21,在此模式下通過修改UI接口的目標速度/轉矩來調整電機控制的速度/轉矩大小,雙擊此欄位即可修改數值,設定完成可看到下面欄位顯示設置成功的信息。
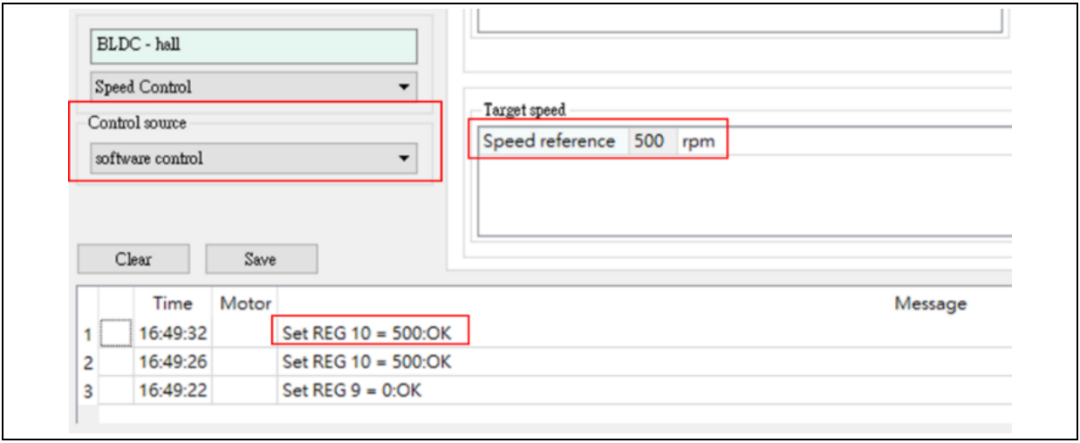
圖21.軟件控制來源設置目標速度
電機應用方案
雅特力AT32 MCU在電機領域得到廣泛應用,可全方位滿足電動兩輪車/摩托車、高速吹風機、吊扇控制器、洗衣機、伺服控制器、高速散熱風扇、電鉆、鏈鋸、割草機等應用開發需求,點擊雅特力官網“應用方案-電機驅動”可查閱詳情。
-
電機
+關注
關注
142文章
9048瀏覽量
145880 -
雅特力
+關注
關注
0文章
160瀏覽量
8079 -
AT32
+關注
關注
1文章
115瀏覽量
2115
發布評論請先 登錄
相關推薦
雅特力攜高性能 MCU亮相ELEXCON 2022,持續發力中高端
活動預告丨雅特力與您相約電機智造與創新應用暨電機產業鏈交流會

直播預告|雅特力AT32 MCU高效電機應用平臺與解決方案
雅特力科技榮獲“2023年BLDC電機控制器行業創芯突破獎”
雅特力與您相約2023電機控制先進技術研討會
雅特力科技榮獲“2023年度電機控制器十大主控芯片”

AT32講堂087 | 雅特力AT32 IDE快速入門指南





 工商網監
工商網監
評論