") 高壓功率放大器在壓電疊堆驅(qū)動器研究中的應(yīng)用
高壓功率放大器在壓電疊堆驅(qū)動器研究中的應(yīng)用
實驗名稱:壓電疊堆驅(qū)動器的位移響應(yīng)
研究方向:選用一種新型的主動流動控制方法——仿生流動控制來減小翼面表面的流動阻力。根據(jù)翼面流動控制反應(yīng)時間短、輸出力大和位移較大等要求,在常用的智能材料中選擇了BCS3-05051壓電疊堆驅(qū)動器,集成了一個柔性動壁實驗系統(tǒng),模擬海豚表皮高速運動下的狀態(tài),并通過位移測量和數(shù)值模擬觀察其減阻特性。通過激光位移傳感器對動壁實驗系統(tǒng)進(jìn)行位移測量時,發(fā)現(xiàn)其表面產(chǎn)生的駐波存在倍頻現(xiàn)象,引發(fā)這種現(xiàn)象的緣由是驅(qū)動電壓的相位差,放大后信號失真以及壓電疊堆本身的遲滯效應(yīng),針對這種狀態(tài),提出了通過示波器實時監(jiān)控,改變放大倍數(shù)以及通過非線性遲滯模型來調(diào)整驅(qū)動電壓等方法,以消除倍頻現(xiàn)象。
實驗?zāi)康模?/strong>通過對動壁實驗系統(tǒng)的位移測量和數(shù)值模擬,驗證動壁駐波運動的減阻效果。結(jié)果表明,其減阻的機理是駐波運動在柔性動壁表面產(chǎn)生了一列穩(wěn)定的渦旋;駐波運動的頻率相較于振幅而言對減阻效果的影響更大。
測試設(shè)備:函數(shù)信號發(fā)生器、ATA-4315高壓功率放大器、激光測振儀、數(shù)字存儲示波器等。
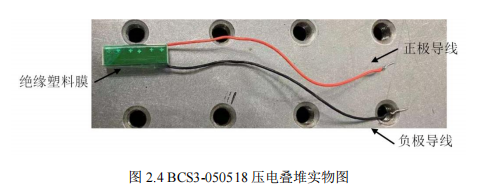
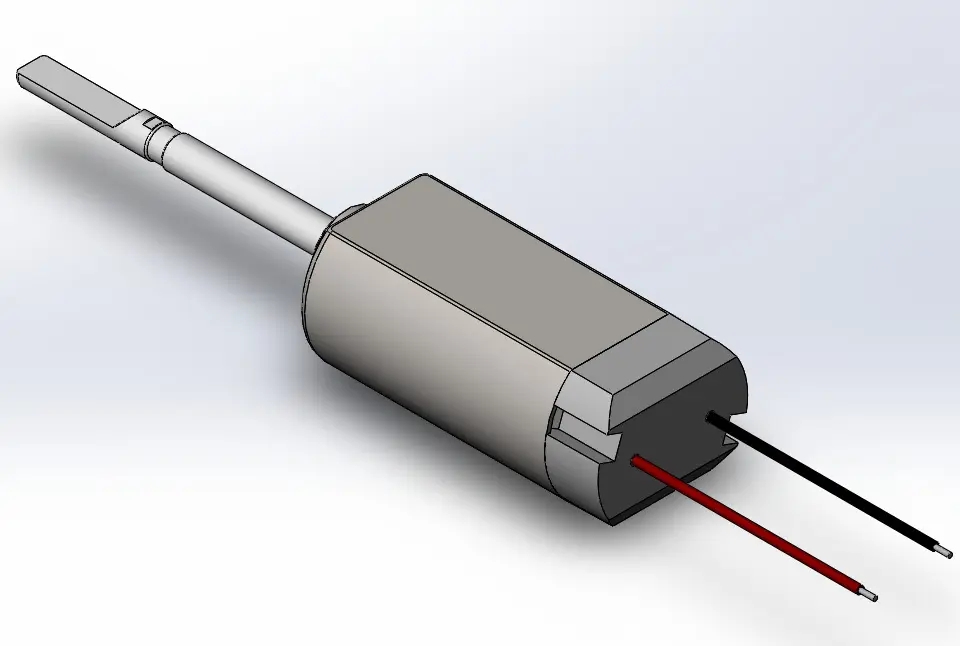
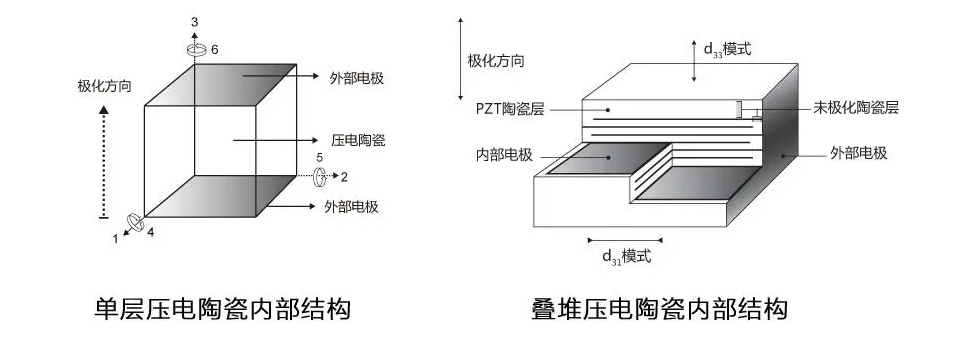
實驗過程:BCS3-050518壓電疊堆實物圖如下圖所示,外層為絕緣塑料膜,正負(fù)極線分別以紅色和黑色的標(biāo)示出來并外接75mm長。由于在驅(qū)動過程中,常常會對壓電疊堆施加不同幅值不同頻率的電壓,根據(jù)壓電疊堆工作原理,其在不同情況下的位移不盡相同,測量了其在不同參數(shù)的交變電壓下的位移響應(yīng)。
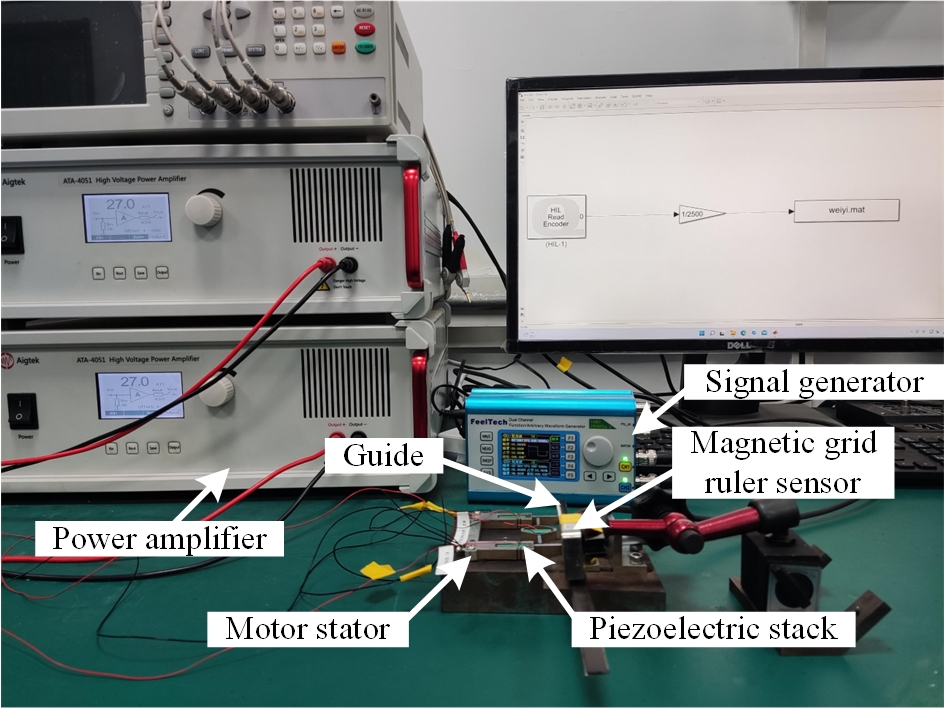
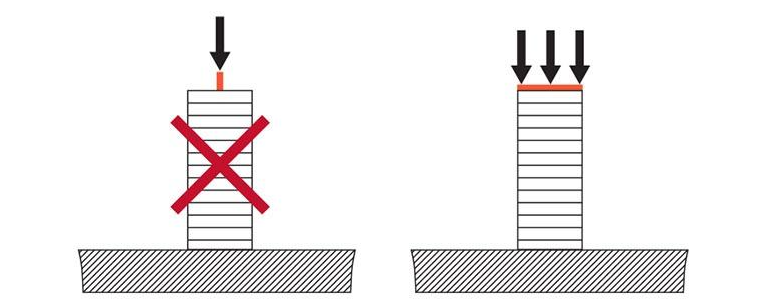
壓電疊堆驅(qū)動器的位移測量裝置示意圖如下圖所示,壓電疊堆通過硅橡膠粘連在剛性承載平臺上,底部可當(dāng)成固定邊界條件,頂部不附加任何載荷,完全自由邊界條件。由于壓電疊堆的位移較為微小,因此將剛性承載平臺固定在隔振臺上,避免外界振動對測量造成影響。通過函數(shù)信號發(fā)生器產(chǎn)生想要的驅(qū)動電壓,通過功率放大器將電壓進(jìn)行放大,然后分別以正負(fù)極接入壓電疊堆進(jìn)行驅(qū)動。通過激光測振儀測量壓電疊堆表面的位移,為了提高激光的反射率,在其表面貼上增強反光效果薄膜,激光測振儀所測得距離變換轉(zhuǎn)換為電壓信號的變化,通過示波器將其記錄下來并乘以相應(yīng)的靈敏度,即可得到壓電疊堆的位移。
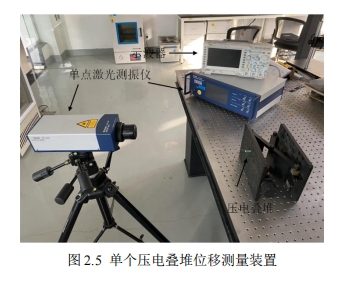
在壓電疊堆被施加驅(qū)動電壓之后,通過單點激光測振儀對其表面位移進(jìn)行測量。該激光測振儀基于激光多普勒原理進(jìn)行測量,將輸出激光照射到待測目標(biāo)上,同時收集目標(biāo)反射激光,經(jīng)干涉產(chǎn)生正比于目標(biāo)速度的多普勒頻移信號,經(jīng)內(nèi)置于控制器內(nèi)的解碼器運算處理,輸出被測物的速度值和位移值。核心設(shè)備分別為圖中所示的高性能控制器和非接觸式高靈敏度光學(xué)頭,這里采用的是標(biāo)準(zhǔn)光學(xué)頭,可在距目標(biāo)0.5米~100米距離上進(jìn)行測量,具有極高的測量分辨率和極大的動態(tài)測量范圍,可測量原子級微弱振動到數(shù)十萬g沖擊。在帶寬為1Hz的情況下,其速度分辨率可達(dá)到0.02,位移分辨率最高可至0.15nm,對于壓電疊堆的微米級位移而言,其完全可以滿足測量的要求。
激光位移傳感器所得信號通過BNC線傳輸?shù)綌?shù)字存儲示波器中,該示波器擁有四通道,可以存儲100kpts的數(shù)據(jù),最快更新速率高達(dá)50000個波形/秒,示波器可以同時將激光位移傳感器發(fā)出的電壓信號和函數(shù)發(fā)生器產(chǎn)生的信號記錄下來,通過數(shù)字處理將其輸出為電信號,從中可以得到壓電疊堆的具體位移與所施加的激勵源之間的關(guān)系。
實驗結(jié)果:從上述壓電疊堆工作原理來看,壓電疊堆在直流電壓下的位移響應(yīng)與電壓基本成正比關(guān)系,但在實際工作中,通常驅(qū)動電壓會根據(jù)需求進(jìn)行實時變化,也就是說施加在壓電疊堆上的電壓幅值并不是一個定值,在變化電壓幅值下,壓電疊堆驅(qū)動器內(nèi)部連接用的膠層由于剛度與壓電陶瓷片相差較大,其變形速度與壓電陶瓷片并不一致,因此需要研究其位移響應(yīng)與電壓之間的關(guān)系。
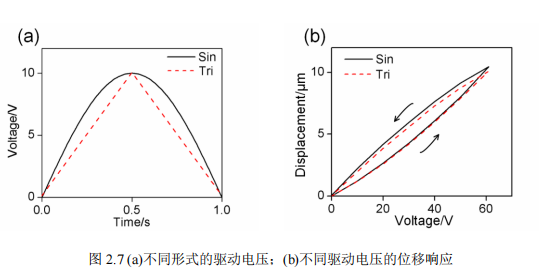
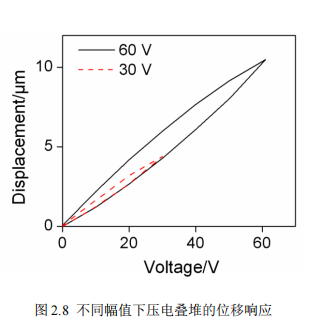
對于壓電疊堆而言,為了研究電壓幅值與位移響應(yīng)之間的線性關(guān)系,需要保證電壓幅值是線性增長,也就是對于壓電疊堆輸入一個三角波。但是通常驅(qū)動電壓都是由平滑的三角函數(shù)形式構(gòu)成,因此對于兩種不同的波形,首先需要研究其函數(shù)形式對于壓電疊堆的位移響應(yīng)會有什么影響。通過任意函數(shù)發(fā)生器,對壓電疊堆分別施加三角波和最常見的三角函數(shù)正弦波,兩種波形的頻率一致,并且盡量小,接近于直流狀態(tài),電壓峰峰值也一致,如圖2.7(a)所示。通過激光位移傳感器測得壓電疊堆在兩種電壓波形下的位移,如圖2.7(b)所示。圖中可以看出,兩種波形下的壓電疊堆驅(qū)動器位移形式較為相似,單個電壓下的位移之間誤差不超過5%,由此可以看出,三角波形和正弦波形對于壓電疊堆的位移響應(yīng)并沒有明顯的影響。隨后通過調(diào)整功率放大器的放大倍數(shù),對壓電疊堆施加不同幅值的電壓,觀察不同幅值電壓下壓電疊堆驅(qū)動器的位移響應(yīng)。如圖2.8所示,在驅(qū)動電壓從60V下降至一半30V以后,最大位移下降了不止一半,并且遲滯曲線的寬度明顯減小,這表明在低電壓下壓電疊堆的遲滯效應(yīng)較弱。
此外,對于圖2.7,在施加的電壓從零加載到最大值,再從最大值落回零點的時候,可以明顯看出在電壓加載過程中,壓電疊堆的位移與電壓之間基本處于線性關(guān)系,但是在電壓卸載過程中,壓電疊堆的位移出現(xiàn)明顯的非線性,其并沒有按照原本的線性曲線返回,而是出現(xiàn)了一個位移上的滯后,圖中體現(xiàn)為加載曲線和卸載曲線之間的空隙。這種滯后現(xiàn)象與磁滯現(xiàn)象非常相似,構(gòu)成壓電疊堆的壓電陶瓷片在制作流程中經(jīng)過施加高壓和高溫的極化操作,其本身具備了自發(fā)極化的能力,在外電場的作用下,壓電陶瓷片中的電偶極矩方向會發(fā)生變化,變化過程中電極化強度P和電場強度E的變化曲線與鐵磁體的磁滯回線非常相似,這種現(xiàn)象被稱為壓電陶瓷的鐵電性。具有鐵電性的壓電陶瓷與磁體有許多相似的物理性質(zhì),例如在電壓升降過程中的電滯回線與鐵磁體的磁滯回線有著類似的形式,鐵電體中的電疇與磁體中的磁疇對應(yīng)。在外加交變電壓下,具有鐵電性的壓電陶瓷的電極化強度與外加電場之間的關(guān)系并非線性關(guān)系,這個現(xiàn)象被稱為電滯現(xiàn)象[79]。它形成的原因是因為壓電晶體具有一定的不對稱性,x軸的晶格常數(shù)和z軸的晶格常數(shù)并不相等,壓電陶瓷在經(jīng)過極化處理后仍然存在著一些與極化方向為90°的電偶極子。壓電陶瓷在相對較低電壓下的位移主要是由于外電場使得壓電晶體中的電偶極子發(fā)生了極化,這種極化方向的變化也就是逆壓電效應(yīng),使得壓電陶瓷產(chǎn)生線性的位移。然而當(dāng)壓電陶瓷受到較高的電壓時,壓電晶體中與極化方向呈90°的電疇逐漸開始運動,由于原本x軸的晶格常數(shù)和z軸的晶格常數(shù)不相等,這種兩軸的轉(zhuǎn)動就導(dǎo)致了壓電晶體在極化方向上的位移變化與電壓之間并非呈線性關(guān)系。另外,與極化方向呈90°的電疇存在著兩種類型,一種在電壓卸載后會重新回到90°方向,另一種則是不可逆的狀態(tài),即使電壓卸載后方向也不會改變,仍然處于極化方向。因此在外加電場卸載后,壓電陶瓷的位移無法完全復(fù)制加載過程,其位移非線性會進(jìn)一步加大,這就出現(xiàn)了壓電疊堆的電滯現(xiàn)象
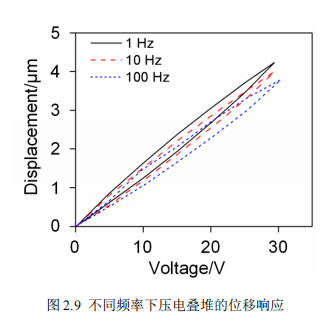
壓電疊堆驅(qū)動器的外加激勵電壓除了其波形和幅值以外,頻率也是其中的一個重要參數(shù)。由于壓電疊堆的電容性,其在外加電壓下會使得內(nèi)部電荷運動,從而移動到正負(fù)電極表面上。這種電荷的移動需要一定的時間,如果外加電壓變換過快,就有可能導(dǎo)致電荷沒有移動到位,壓電陶瓷片沒有極化完全,相應(yīng)的產(chǎn)生的位移也就不同。因此選用不同頻率的正弦交變電壓激勵壓電疊堆,測量其位移的變化。如圖2.9所示,給壓電疊堆驅(qū)動器施加一個30V的正弦交變電壓,頻率分別為1Hz、10Hz和100Hz,從激光測振儀的結(jié)果來看,壓電疊堆的最大位移與正弦交變電壓的頻率成反比關(guān)系,頻率增大時最大位移減小,100Hz時的最大位移比之1Hz時減小了10.48%
此外將正弦交變電壓的頻率逐步提高,將位移的相位與輸入電壓的相位進(jìn)行比較,從圖2.10中可以發(fā)現(xiàn),壓電疊堆的動態(tài)位移相位基本與驅(qū)動電壓一致,并且位移與電壓之間的相位差在1000Hz時達(dá)到3°。由于本實驗中壓電疊堆一端的邊界條件處于自由狀態(tài),因此其加載電壓的頻率不可過高,在低頻情況下,壓電疊堆的相位與電壓頻率之間幾乎沒有關(guān)系。這對于翼面流動控制來說是一個好的特性,在改變頻率的情況下壓電疊堆驅(qū)動器的位移相位并不會隨之改變,這給了主動控制一定的調(diào)整空間。
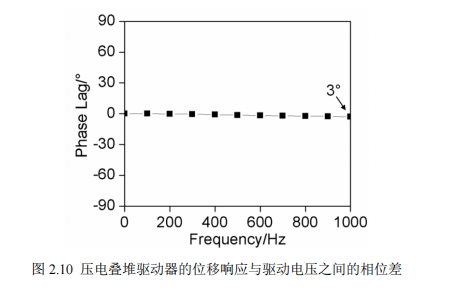
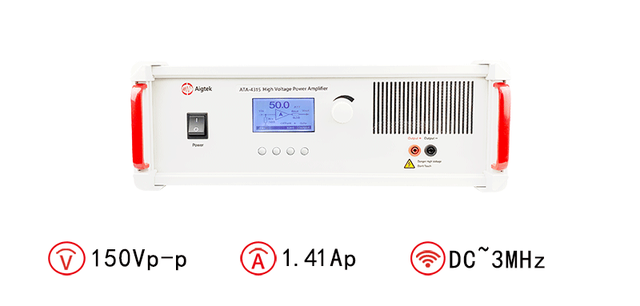
圖:ATA-4315高壓功率放大器指標(biāo)參數(shù)
本文實驗素材由西安安泰電子整理發(fā)布,西安安泰電子科技有限公司(Aigtek)是國內(nèi)專業(yè)從事測量儀器研發(fā)、生產(chǎn)和銷售的高科技企業(yè)。公司致力于功率放大器、功率信號源、功率放大模塊、計量校準(zhǔn)產(chǎn)品等產(chǎn)品為核心的相關(guān)行業(yè)測試解決方案的研究,為用戶提供具有競爭力的測試方案,Aigtek已經(jīng)成為在業(yè)界擁有廣泛產(chǎn)品線,且具有相當(dāng)規(guī)模的儀器設(shè)備供應(yīng)商,樣機都支持免費試用。
-
驅(qū)動器
+關(guān)注
關(guān)注
52文章
8236瀏覽量
146355 -
壓電
+關(guān)注
關(guān)注
1文章
92瀏覽量
14082 -
高壓功率放大器
+關(guān)注
關(guān)注
0文章
93瀏覽量
4494
發(fā)布評論請先 登錄
相關(guān)推薦
壓電疊堆功率放大器在直升機機身振動研究中的應(yīng)用
ATA-4051高壓功率放大器在非共振式壓電直線電機性能測試中的應(yīng)用
功率放大器在合成射流激勵器中的應(yīng)用
壓電陶瓷功率放大器在物鏡驅(qū)動測試中的研究
壓電疊堆應(yīng)用案例|功率放大器驅(qū)動超聲電機導(dǎo)軌運動

功率放大器在壓電驅(qū)動器輸出力遲滯效應(yīng)研究中的應(yīng)用

ATA-4051高壓功率放大器在非共振式壓電直線電機性能測試中的應(yīng)用
功率放大器應(yīng)用場景介紹 在壓電疊堆大力矩微位移平臺驅(qū)動中的應(yīng)用

ATA-P2010壓電疊堆功率放大器-直流偏置對壓電疊堆測試的重要性
ATA-P系列功率放大器在壓電疊堆中的作用是什么

高壓功率放大器在非共振式壓電直線電機性能測試中的應(yīng)用
ATA-P0102功率放大器在壓電陶瓷及壓電疊堆驅(qū)動中的應(yīng)用
ATA-4051高壓功率放大器在非共振式壓電直線電機性能測試中的應(yīng)用





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論