 智能機器人應用案例之農業采摘機器人
智能機器人應用案例之農業采摘機器人
目前采摘機器人研究重點大多集中在視覺系統對果實目標的識別和定位上,利用攝像頭獲取果實圖片信息,通過復雜的圖像信號處理算法,編制程序進行邏輯處理,實現果實判斷,發出采摘命令。這種方式機器人具有較好的自動識別的能力,并且能夠自動采摘,無需人工操作,是農業機器人最理想的方式,但目前相關技術不夠成熟,投入較高。本設計采用人機協作方式,即采用人工判別果實,機器人負責摘取。通過人工現場觀察判斷,使用無線遙控遠程控制機器人動作。這種方式現有技術比較成熟,使得機器人研發周期縮短,造價成本低,雖然不能夠完全代替人勞動,但能夠降低人的勞動強度,對于目前中國農業的水平,能夠更好的普及。
針對以上存在的問題,本文設計了一款基于ATmega32的模擬采摘機器人,能實現人工操作的機械采摘,通過紅外遙控控制機械臂使末端夾持器伸到目標果實所在位置,進行抓取工作,完成采摘任務。
1 機器人總體方案設計
機器人設計融合了機械制造技術,電子電路技術,自動控制和傳感器檢測技術,以及軟件開發編程等。本文中機器人的傳感器和紅外遙控器的信號輸人到主控制板,主控制板處理后輸出控制三自由度機械臂和履帶底盤結構的機器人,紅外遙控機械臂,實現抓取果實。機器人結構框圖如圖1所示。
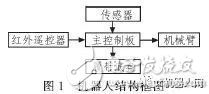
機器人的控制模式為無線控制機器人采用直接操縱方式,操縱者通過遙控器向遠端發送操縱指令。控制機器人的車體的前向運動,左右轉向,三自由度的機械臂的運動,及夾持器旋轉、張與合。文中設計的機器人具有結構簡單,功能豐富,可擴展性強等特點。
2 機械裝置設計
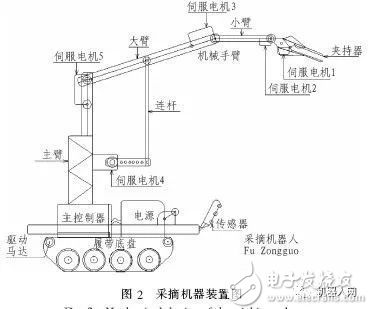
遙控采摘機器人機械裝置圖如圖2所示,主要包括兩部分:兩自由度的移動載體和三自由度帶夾持器的機械臂。機器人主體使用網孔鋁板材料和工程塑料組裝成機器人機體,結構輕巧,方便在車體上增加模塊。移動載體為履帶式底盤,加裝了主控電路板、采摘輔助裝置、多種傳感器、電源模塊等。履帶底盤每一側采用雙履帶結構,使用4臺FAULHABER電機驅動。機械臂固定在履帶式行走機構上,機械臂上的伺服電機使用扭矩10 kg/cm的MG995金屬齒輪舵機,機械臂上伺服電機1控制夾持器的張開和合并,使得夾持器能夠完成采摘和剪切等任務。伺服電機2控制夾持器的左右旋轉。伺服電機3控制小臂上下運動,伺服電機4通過連桿和伺服電機5聯合驅動大臂上下運動。
3 硬件電路設計
由于機器人需要處理眾多傳感器輸入數據,同時控制眾多電機,這對微控制器提出苛刻要求。基于開放性,可靠性,實時性等方面考慮,本設計采用高性能AVR處理器--ATmega系列,選擇芯片型號為ATmega32 16AU作為控制核心。ATmega32 16AU,具有44個Pin,是32KB系統內可編程Flash的8位的高性能、低功耗微控制器。ATmega32是基于增強的AVR RISC結構的低功耗8位CMOS微控制器。
ATmega32的數據吞吐率高達1 MIPS/MHz,從而可以緩減系統在功耗和處理速度之間的矛盾。其內核具有豐富的指令集和32個通用工作寄存器。所有的寄存器都直接與算術邏輯單元(ALU)相連接,使得一條指令可以在一個時鐘周期內同時訪問2個獨立的寄存器。其具有先進的RISC結構,131條指令大多數指令執行時間為單個時鐘周期,32個8位通用工作寄存器,全靜態工作,工作于16 MHz時,性能高達16 MIPS,只需2個時鐘周期的硬件乘法器。
3.1 控制主板設計
基于ATmega32主板電路由電源模塊,晶振模塊,通信模塊,電機驅動模塊,遙控編碼模塊和輸入輸出部分等。主板電路上設計了8個輸入接口、8個輸出接口、4個直流電機輸出接口,ISP接口和程序下載接口、IR紅外遙控接收頭接入端口及IR紅外遙控器通道設置撥碼開關,各個模塊接口采用插拔式,可便于各種模塊的使用和功能擴展。輸入接口以多種傳感器,檢測信號輸入MCU中。在計算機上使用AVR開發軟件,編寫程序,然后將程序下載到ATmega32中。紅外發射模塊發出控制信號給紅外接收模塊,通過紅外接收模塊將信號處理后傳入MCU中,外界傳感器模塊將感應信號處理后傳入MCU中,其將各種輸入信號進行處理分析后向執行器件發出控制信號。
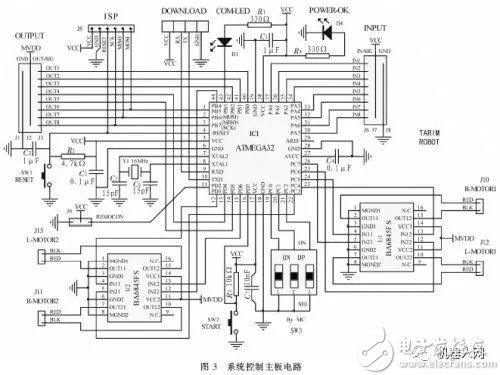
本設計的控制主板具有很強的擴展性,通過增添模塊和修改程序,可用于各種機器人開發和智能電路制作,應用廣泛。控制電路如圖3所示。
AVR與PC之間進行串口通信,主板下載端口采用UART的串行通信方式,而計算機無法與UART端口直接相連,故需要一個USB轉UART的轉換器。綜合實用性及可靠性等因素,設計轉換電路芯片為單芯片橋接器CP2101。CP2101上集成的USB收發器無需外部電阻,集成的時鐘無需外部振蕩器,集成的512字節EEPROM用于存儲產品,片內電壓調節器為3.3 V輸出。
3.3 紅外遙控器設計
本設計紅外遙控器采用上海貝嶺的BL35P12芯片,BL35P12是一款OTP類型低功耗8位通用微控制器(MCU),完成按鍵的掃描和紅外編碼信號的生成,現精確控制,故采用此芯片作為遙控主控制芯片。通過操作方向鍵控制機器人前后左右運動,操作數字鍵和特殊鍵可實現不同的動作。
4 軟件程序設計
本采摘機器人控制系統的軟件設計主要考慮控制的確性和系統的開放性,采用AVR Studio4的編程環境,AVRStudio4是一個完整的開發工具,包括編輯、仿真功能,利用這個工具,可以編輯源代碼,并在AVR器件上運行。采摘機器人系統的控制軟件由主程序、伺服馬達驅動子程序、遙控接收端子程序、傳感器處理子程序、直流電機控制子程序等組成。
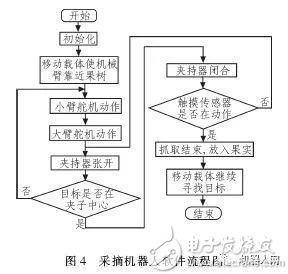
程序主要是對AVR單片機I/O口、T/C(定時器/計數器)、PWM調速、中斷處理及全局變量、宏定義等的處理。程序采用結構化和模塊化編寫思想,使程序的可用性和可讀性達到較佳狀態。通過調用各個子程序,修改主程序上的直流電機的速度和伺服電機的角度等參數,調試到機器人機械手到最佳角度,根據控制策略進行了軟件設計,編制主程序流程圖如圖4所示。
5 采摘機器人調試與試驗
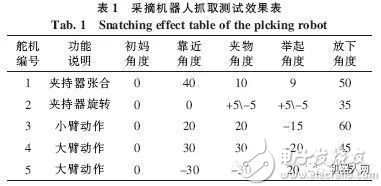
本系統設計的遙控模擬采摘機器人伸展后長為1.2 m,寬度0.38 m,機器人最大速度為0.5 m/s,最大爬坡角度為45°。紅外遙控器最長遙控距離為3 m。機器人機械臂動作由舵機控制,這里對機械臂舵機進行測試,各個舵機角度如表1所示。機器人組裝測試后完成后抓取實物圖測試效果如圖5所示。
本機器人采用模塊化設計,各模塊功能互補,提供多種不同的采摘模式,可根據作業環境選擇合適的模式進行采摘。同時,功能模塊具有很好的擴展性,可通過編程進行模塊擴展。同時,可多種任務并行工作,提高了采摘效率。
6 結論
文中設計了一個基于ATmega32采摘機器人,機器人主體使用堅固輕巧材料,保證機器人輕巧,穩定。機器人采用履帶底盤驅動,創新設計了雙履帶條結構,采摘結構設計了二三自由度機械臂,能夠靈活地抓取實物。
輸入控制程序后,機器人通過外接傳感器,可以實現半自主控制和紅外遙控。機器人具有振動搖樹和逐個夾持兩種互補采摘模式。通過實際測試表明這款智能采摘機器人能夠較好的完成預期的任務,本設計系統體積小,重量輕。通過試驗驗證,系統的人機交互能力較強,運行穩定可靠,控制靈活反應迅速,達到了預期的設計目的。尤其是運動速度快,動作靈敏,能夠適應復雜果園環境,其快速性和穩定性都達到了規定的要求,機器人擴展性強,功能強大,成本低,具有一定的參考價值。
當然,這只是作為采摘機器人的一種探索設計,離實際作業有很大的差距。在以后的研究工作中,還需要根據實際作業,對掛果果樹的高度和果實的大小尺寸,以及果實的脆弱性等實際情況作深入的研究和改進,如果采用完全智能采摘還須加入機器視覺,以等視頻監視模塊,根據采集的圖像信息饋送到遙控機器人平臺,指導機械手操作,機械采摘手也應設計應力傳感器,以便智能調節張開度,以免損傷果實。
-
智能機器人
+關注
關注
17文章
868瀏覽量
82334 -
農業智能
+關注
關注
1文章
23瀏覽量
7794 -
智慧農業
+關注
關注
4文章
785瀏覽量
19843
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論