 物聯網硬件設計時IO不夠用?IO擴展芯片的使用
物聯網硬件設計時IO不夠用?IO擴展芯片的使用
一 概述
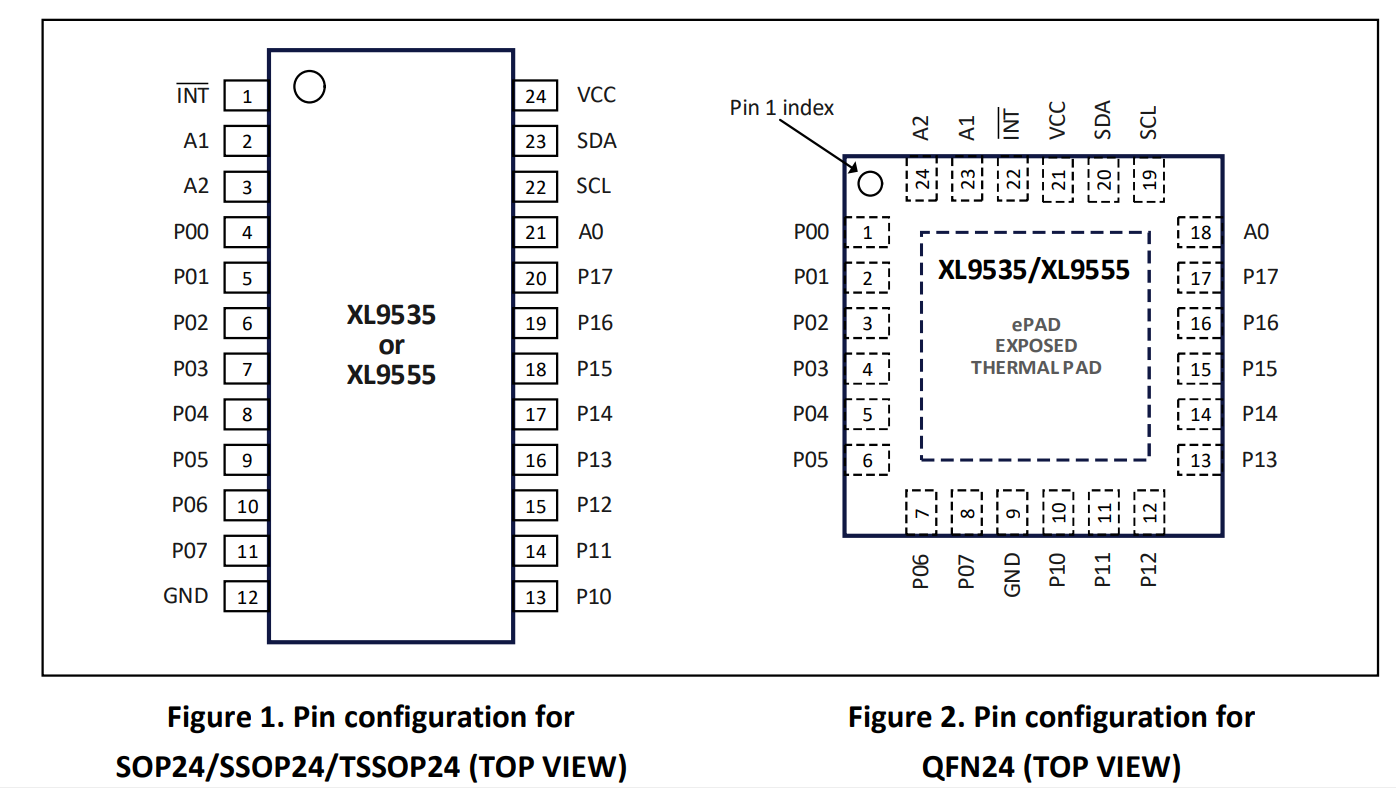
XL9535是一款24引腳CMOS器件,通過I2C總線/SMBus接口 串行時鐘線(SCL)、串行數據(SDA)為大多數微控制器系列提供16位通用并行輸入/輸出(GPIO)擴展。這些設備設計用于2.3-V至5.5-V Vcc操作。這些改進包括更高的驅動能力、5V I/O容差、更低的電源電流、單獨的I/O配置和更小的封裝。 通電時,I/O被配置為輸入。系統主機可以通過寫入I/O配置位來啟用I/O作為輸入或輸出。每個輸入或輸出的數據都保存在相應的輸入或輸出寄存器中。輸入端口寄存器的極性可以用極性反轉寄存器反轉。所有寄存器均可由系統主控器讀取。 當任何輸入狀態與其對應的輸入端口寄存器狀態不同時,這些設備開漏中斷(/INT)輸出被激活,并用于向系統主機指示輸入狀態已改變。在超時或其他不當操作的情況下,系統主設備可以利用上電重置功能重置這些設備。通電重置將寄存器設置為默認值,并初始化I2C/SMBus狀態機。三個硬件引腳(A0、A1和A2)改變固定的I2C總線地址,并允許多達八個設備共享同一I2C總線/SMBus。
二 特性
I2C總線至16位GPIO擴展器
工作電源電壓范圍為2.3 V至5.5 V
低待機電流消耗
5 V容錯I/O端口
400 kHz快速模式I2C總線時鐘頻率
SCL/SDA輸入上的噪聲濾波器
內部通電復位
通電時無故障
極性反轉寄存器
開漏有源低中斷輸出
16個I/O引腳,默認為16個輸入
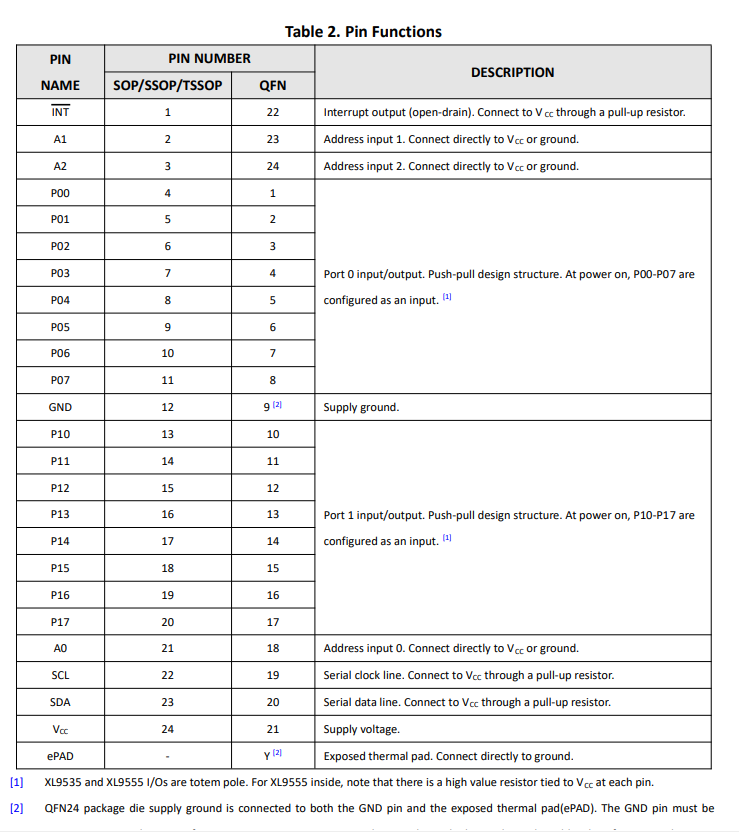
三 引腳配置和功能
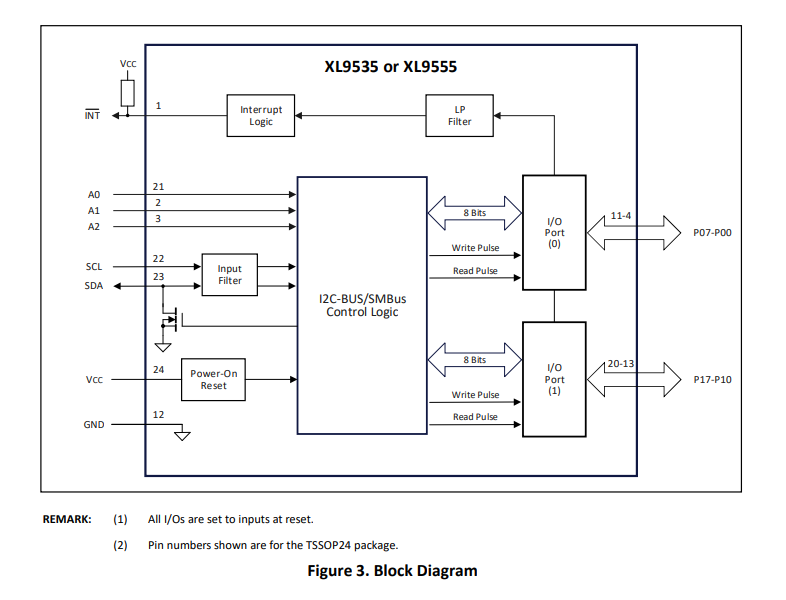
四 功能框圖
五 XL9535組件的使用
1 Gitee鏈接地址
Demo位于amaziot_bloom_os_sdksample3rd1.0_XL9535
Gitee源碼地址:https://gitee.com/ning./hongdou
Github源碼地址:https://github.com/ayumid/hongdou
編譯指令:.build.bat -l .amaziot_bloom_os_sdksample3rd1.0_XL9535
2 組件功能介紹
3 代碼講解
1 drv_xl9535_i2c_init
功能:該函數用于,將發送數據長度寫入xl9535寄存器。
參數:五
返回值:無
示例:
//初始化i2c總線 ret = drv_xl9535_i2c_init();
2 drv_xl9535_i2c_read
功能:該函數用于,讀取I2C從機。
參數:五
返回值:無
示例:
RegAddr = 0x00;
ret = drv_xl9535_i2c_read(&RegAddr, &RegReadValue0);
sample_xl9535_catstudio_printf("read reg 00 i2c value=0x%x, ret=%dn", RegReadValue0, ret);
3 drv_xl9535_i2c_write
功能:該函數用于,發送數據到I2C從機。
參數:五
返回值:無
示例:
RegAddr = 0x06;
RegWriteValue = 0xFF;
ret = drv_xl9535_i2c_write(&RegAddr, &RegReadValue0);
sample_xl9535_catstudio_printf("write i2c value=0x%x, ret=%dn", RegWriteValue, ret);
4 Demo實戰
4.1 概述
上電后,按下按鍵,串口會打印出按下了哪一個按鍵
4.2 測試
測試步驟:
參考編譯教程,和文檔開頭的編譯指令,進行編譯
按照編譯教程選擇對應的選項
燒錄
4.3 宏定義介紹
sample_xl9535_uart_printf
輸出日志到DEBUG 串口,日志比較少,可以輸出到這個串口,如果日志比較多,需要輸出到usb口,以免不必要的問題出現
sample_xl9535_catstudio_printf
輸出日志到USB 串口,使用catstudio查看,catstudio查看日志需要更新對應版本mdb.txt文件,軟件打開filtter過濾日志,只查看用戶輸出的日志
SAMPLE_XL9535_STACK_SIZE
棧空間宏定義
4.4 全局變量介紹
sample_xl9535_int_detect_stack_ptr
任務棧空間,本例使用數組實現,用戶在做項目時,可以預先估算下當先任務需要的大致棧空間,OS沒有提供可以查看棧空間使用情況的API
sample_xl9535_int_detect_task_ref
任務指針
4.5 函數介紹
Phase1Inits_enter
底層初始化,本例空
Phase1Inits_exit
底層初始化,本例空
Phase2Inits_enter
底層初始化,本例空
Phase2Inits_exit
創建主任務,初始化INT 引腳
代碼片段:
int ret = 0; GPIOConfiguration config = {0}; //創建定時器 OSATimerCreate(&sample_xl9535_int_detect_timer_ref); //創建中斷事件 OSAFlagCreate( &sample_xl9535_int_detect_flg_ref); Os_Create_HISR(&sample_xl9535_int_detect_hisr, "sample_xl9535_int_detect_hisr", sample_xl9535_detect_handler, 2); //創建中斷處理任務 OSATaskCreate(&sample_xl9535_int_detect_task_ref, sample_xl9535_int_detect_stack_ptr, SAMPLE_XL9535_STACK_SIZE, 100, "detect_task", sample_xl9535_detect_task, NULL); //初始化int引腳,這里使用70腳 gpio126 config.pinDir = GPIO_IN_PIN; config.pinEd = GPIO_RISE_EDGE; config.pinPull = GPIO_PULLUP_ENABLE; config.isr = sample_xl9535_irq_handler; GpioInitConfiguration(SAMPLE_GPIO_ISR_PIN_NUM, config);
sample_xl9535_detect_task
主任務,代碼發分為兩部分,一部分是發送不定長數據;另一部分是上電后等待其它模塊發送的數據,收到后打印到串口。
代碼片段:
void sample_xl9535_detect_task(void *param) { GPIO_ReturnCode ret = 0; UINT32 value = 0; OSA_STATUS status = OS_SUCCESS; UINT32 flag_value = 0; unsigned char RegAddr = 0; unsigned char RegWriteValue = 0; unsigned char RegReadValue0 = 0; unsigned char RegReadValue1 = 0; UINT8 down_en = 0; UINT8 up_en = 0; UINT8 sig_en = 0; UINT8 mul_en = 0; UINT8 read_en = 0; UINT8 de_en = 0; UINT8 ck_en = 0; UINT8 sim_en = 0; UINT8 gnss_en = 0; UINT8 nb_en = 0; UINT8 fourg_en = 0; //初始化i2c總線 ret = drv_xl9535_i2c_init(); sample_xl9535_catstudio_printf("ql_i2c_init ret %d", ret); //上電后,讀xl9535 io擴展芯片的8個寄存器,測試用 RegAddr = 0x00; ret = drv_xl9535_i2c_read(&RegAddr, &RegReadValue0); sample_xl9535_catstudio_printf("read reg 00 i2c value=0x%x, ret=%dn", RegReadValue0, ret); RegAddr = 0x01; ret = drv_xl9535_i2c_read(&RegAddr, &RegReadValue0); sample_xl9535_catstudio_printf("read reg 01 i2c value=0x%x, ret=%dn", RegReadValue0, ret); RegAddr = 0x02; ret = drv_xl9535_i2c_read(&RegAddr, &RegReadValue0); sample_xl9535_catstudio_printf("read reg 02 i2c value=0x%x, ret=%dn", RegReadValue0, ret); RegAddr = 0x03; ret = drv_xl9535_i2c_read(&RegAddr, &RegReadValue0); sample_xl9535_catstudio_printf("read reg 03 i2c value=0x%x, ret=%dn", RegReadValue0, ret); RegAddr = 0x04; ret = drv_xl9535_i2c_read(&RegAddr, &RegReadValue0); sample_xl9535_catstudio_printf("read reg 04 i2c value=0x%x, ret=%dn", RegReadValue0, ret); RegAddr = 0x05; ret = drv_xl9535_i2c_read(&RegAddr, &RegReadValue0); sample_xl9535_catstudio_printf("read reg 05 i2c value=0x%x, ret=%dn", RegReadValue0, ret); RegAddr = 0x06; ret = drv_xl9535_i2c_read(&RegAddr, &RegReadValue0); sample_xl9535_catstudio_printf("read reg 06 i2c value=0x%x, ret=%dn", RegReadValue0, ret); RegAddr = 0x07; ret = drv_xl9535_i2c_read(&RegAddr, &RegReadValue0); sample_xl9535_catstudio_printf("read reg 07 i2c value=0x%x, ret=%dn", RegReadValue0, ret); //等1s OSATaskSleep(1 * 200); //初始化xl0535 io擴展芯片的06 07寄存器,設置所有的io都是輸入 RegAddr = 0x06; RegWriteValue = 0xFF; ret = drv_xl9535_i2c_write(&RegAddr, &RegReadValue0); sample_xl9535_catstudio_printf("write i2c value=0x%x, ret=%dn", RegWriteValue, ret); RegAddr = 0x07; RegWriteValue = 0xFF; ret = drv_xl9535_i2c_write(&RegAddr, &RegReadValue0); sample_xl9535_catstudio_printf("write i2c value=0x%x, ret=%dn", RegWriteValue, ret); while(1) { // sample_xl9535_catstudio_printf("sample_xl9535_detect_taskrn"); status = OSAFlagWait(sample_xl9535_int_detect_flg_ref, 0x01, OSA_FLAG_OR_CLEAR, &flag_value, OSA_SUSPEND); //紅豆版,設置了邊沿,但是還是會上升沿,下降沿都觸發,所以會執行兩次 if(flag_value & 0x01) { RegAddr = 0x00; //ret = ql_i2c_read(i2c_no, SAMPLE_I2C_SLAVE_ADDR, RegAddr, &RegReadValue0, 1); ret = drv_xl9535_i2c_read(&RegAddr, &RegReadValue0); // sample_xl9535_catstudio_printf("read reg 00 i2c value=0x%x, ret=%dn", RegReadValue0, ret); RegAddr = 0x01; //ret = ql_i2c_read(i2c_no, SAMPLE_I2C_SLAVE_ADDR, RegAddr, &RegReadValue0, 1); ret = drv_xl9535_i2c_read(&RegAddr, &RegReadValue1); // sample_xl9535_catstudio_printf("read reg 01 i2c value=0x%x, ret=%dn", RegReadValue1, ret); //寄存器值非默認值,表示有io輸入,否則表示是上升沿中斷 if(RegReadValue0 != 0xff || RegReadValue1 != 0x07) { event_ticks = OSAGetTicks(); int_status = 0; //判斷是那個IO這里使用寄存器值判斷,后續可以改為根據位判斷 if(RegReadValue1 == DRV_XL9535_BUTTON_DOWN_EN) { // sample_xl9535_catstudio_printf("down int"); down_en = 1; } else if(RegReadValue1 == DRV_XL9535_BUTTON_UP_EN) { // sample_xl9535_catstudio_printf("up int"); up_en = 1; } else if(RegReadValue1 == DRV_XL9535_BUTTON_SIG_EN) { // sample_xl9535_catstudio_printf("sig int"); sig_en = 1; } else if(RegReadValue0 == DRV_XL9535_BUTTON_MUL_EN) { // sample_xl9535_catstudio_printf("mul int"); mul_en = 1; } else if(RegReadValue0 == DRV_XL9535_BUTTON_READ_EN) { // sample_xl9535_catstudio_printf("read int"); read_en = 1; } else if(RegReadValue0 == DRV_XL9535_BUTTON_DE_EN) { // sample_xl9535_catstudio_printf("de int"); de_en = 1; } else if(RegReadValue0 == DRV_XL9535_BUTTON_CK_EN) { // sample_xl9535_catstudio_printf("ck int"); ck_en = 1; } else if(RegReadValue0 == DRV_XL9535_BUTTON_SIM_EN) { // sample_xl9535_catstudio_printf("sim int"); sim_en = 1; } else if(RegReadValue0 == DRV_XL9535_BUTTON_GNSS_EN) { // sample_xl9535_catstudio_printf("gnss int"); gnss_en = 1; } else if(RegReadValue0 == DRV_XL9535_BUTTON_NB_EN) { // sample_xl9535_catstudio_printf("nb int"); nb_en = 1; } else if(RegReadValue0 == DRV_XL9535_BUTTON_4G_EN) { // sample_xl9535_catstudio_printf("4g int"); fourg_en = 1; } } else { if(int_status == 0) { UINT32 keep_ticks = OSAGetTicks() - event_ticks; if(keep_ticks > 20) { //檢測到某個IO被按下后,可以在這里,或者發送信號,消息等去其它任務執行相應操作 // sample_xl9535_catstudio_printf("keep_ticks:%d, event_ticks:%d", keep_ticks, event_ticks); if(down_en == 1) { sample_xl9535_catstudio_printf("down en"); } else if(up_en == 1) { sample_xl9535_catstudio_printf("up en"); } else if(sig_en == 1) { sample_xl9535_catstudio_printf("sig en"); } else if(mul_en == 1) { sample_xl9535_catstudio_printf("mul en"); } else if(read_en == 1) { sample_xl9535_catstudio_printf("read en"); } else if(de_en == 1) { sample_xl9535_catstudio_printf("de en"); } else if(ck_en == 1) { sample_xl9535_catstudio_printf("ck en"); } else if(sim_en == 1) { sample_xl9535_catstudio_printf("sim en"); } else if(gnss_en == 1) { sample_xl9535_catstudio_printf("gnss en"); } else if(nb_en == 1) { sample_xl9535_catstudio_printf("nb en"); } else if(fourg_en == 1) { sample_xl9535_catstudio_printf("4g en"); } } down_en = 0; up_en = 0; sig_en = 0; mul_en = 0; read_en = 0; de_en = 0; ck_en = 0; sim_en = 0; gnss_en = 0; nb_en = 0; fourg_en = 0; } int_status = 1; } } } }
4.6 固件
上電后,按下按鍵,串口會打印出按下了哪一個按鍵
本文章源自奇跡物聯開源的物聯網應用知識庫Cellular IoT Wiki,更多技術干貨歡迎關注收藏Wiki:Cellular IoT Wiki 知識庫(https://rckrv97mzx.feishu.cn/wiki/wikcnBvAC9WOkEYG5CLqGwm6PHf)
歡迎同學們走進AmazIOT知識庫的世界!
這里是為物聯網人構建的技術應用百科,以便幫助你更快更簡單的開發物聯網產品。
Cellular IoT Wiki初心:
在我們長期投身于蜂窩物聯網 ODM/OEM 解決方案的實踐過程中,一直被物聯網技術碎片化與產業資源碎片化的問題所困擾。從產品定義、芯片選型,到軟硬件研發和測試,物聯網技術的碎片化以及產業資源的碎片化,始終對團隊的產品開發交付質量和效率形成制約。為了減少因物聯網碎片化而帶來的重復開發工作,我們著手對物聯網開發中高頻應用的技術知識進行沉淀管理,并基于 Bloom OS 搭建了不同平臺的 RTOS 應用生態。后來我們發現,很多物聯網產品開發團隊都面臨著相似的困擾,于是,我們決定向全體物聯網行業開發者開放奇跡物聯內部沉淀的應用技術知識庫 Wiki,期望能為更多物聯網產品開發者減輕一些重復造輪子的負擔。
Cellular IoT Wiki沉淀的技術內容方向如下:
奇跡物聯的業務服務范圍:基于自研的NB-IoT、Cat1、Cat4等物聯網模組,為客戶物聯網ODM/OEM解決方案服務。我們的研發技術中心在石家莊,PCBA生產基地分布在深圳、石家莊、北京三個工廠,滿足不同區域&不同量產規模&不同產品開發階段的生產制造任務。跟傳統PCBA工廠最大的區別是我們只服務物聯網行業客戶。
連接我們,和10000+物聯網開發者一起 降低技術和成本門檻
讓蜂窩物聯網應用更簡單~~
哈哈你終于滑到最重要的模塊了,
千萬不!要!劃!走!忍住沖動!~
歡迎加入飛書“開源技術交流群”,隨時找到我們哦~
點擊鏈接如何加入奇跡物聯技術話題群(https://rckrv97mzx.feishu.cn/docx/Xskpd1cFQo7hu9x5EuicbsjTnTf)可以獲取加入技術話題群攻略
Hey 物聯網從業者,
你是否有了解過奇跡物聯的官方公眾號“eSIM物聯工場”呢?
這里是奇跡物聯的物聯網應用技術開源wiki主陣地,歡迎關注公眾號,不迷路~
及時獲得最新物聯網應用技術沉淀發布
注:本文部分內容來源于網絡,如有侵權,請及時聯系我們。
-
芯片
+關注
關注
456文章
51019瀏覽量
425366 -
接口
+關注
關注
33文章
8667瀏覽量
151523 -
物聯網
+關注
關注
2911文章
44824瀏覽量
375101
發布評論請先 登錄
相關推薦
單片機IO口擴展實例
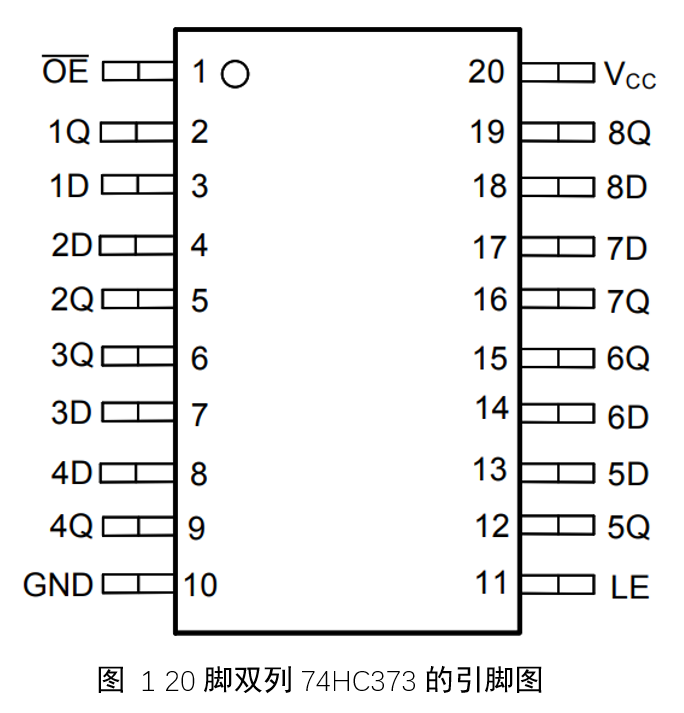
利用74373芯片進行單片機IO口擴展的方法
求圖中IO口擴展的程序!
液晶顯示,IO口不夠用怎么辦?
DSP的PWM口不夠用怎么擴展?
IO口不夠用怎么辦?
單片機IO口如何擴展?
CPLD或FPGA擴展IO口與處理器自帶IO的區別?
單片機IO口擴展方法






 工商網監
工商網監
評論