 物聯網系統中的視頻監控解決方案_攝像頭模組分析
物聯網系統中的視頻監控解決方案_攝像頭模組分析
物聯網系統中為什么要使用攝像頭模組
物聯網系統中使用攝像頭模組的原因主要基于攝像頭模組在數據采集、監控、智能分析以及增強用戶體驗等方面的關鍵作用。以下是詳細的原因分析:
數據采集與實時監控
視覺信息獲取:攝像頭模組能夠實時捕捉并傳輸視覺信息,這是物聯網系統中不可或缺的數據來源。通過攝像頭,系統可以獲取到環境、設備狀態、人員活動等關鍵信息。
遠程監控:在物聯網應用中,攝像頭模組常被用于遠程監控場景,如智能家居、智能安防、智慧城市等。用戶可以通過手機、電腦等終端設備遠程查看監控畫面,實現實時監控和管理。
智能分析與決策支持
圖像識別與分析:結合人工智能和機器學習技術,攝像頭模組可以對采集到的圖像進行智能識別和分析。例如,在智能安防領域,攝像頭可以識別出入侵者、異常行為等,并觸發報警機制;在智能交通領域,攝像頭可以識別車牌、交通流量等,為交通管理提供數據支持。
決策支持:通過攝像頭模組獲取的數據和分析結果,物聯網系統可以做出更加智能的決策。例如,在智能農業中,攝像頭可以監測作物生長情況,為灌溉、施肥等提供精準指導;在智能工廠中,攝像頭可以監測生產線狀態,及時發現并解決問題。
用戶體驗提升
可視化交互:攝像頭模組使得物聯網系統能夠提供更加直觀、可視化的交互方式。用戶可以通過攝像頭實時查看設備狀態、環境變化等,增強對系統的感知和信任。
個性化服務:結合用戶的行為習慣和偏好,攝像頭模組可以為用戶提供更加個性化的服務。例如,在智能家居中,攝像頭可以根據用戶的活動軌跡自動調整燈光、溫度等環境參數;在智能零售中,攝像頭可以分析顧客行為,為商家提供精準的營銷策略。
安全性與隱私保護
安全監控:攝像頭模組在物聯網系統中扮演著重要的安全監控角色。通過實時監控和智能分析,攝像頭可以及時發現并防范潛在的安全威脅,如入侵、盜竊等。
隱私保護:隨著物聯網技術的普及,隱私保護問題也日益受到關注。攝像頭模組在采集和傳輸數據時需要嚴格遵守隱私保護原則,確保用戶數據的安全和隱私。
具體應用場景
家庭安全監控:
在家庭環境中,攝像頭模組可以安裝在室內或室外,實現全天候、無死角的安全監控。用戶可以通過手機APP等終端隨時隨地查看家中情況,及時發現并處理安全隱患,如入侵者、火災等。
部分高端模組還具備人臉識別、行為分析等功能,能夠進一步提升家庭安全水平。
商業環境監控:
在商場、超市、酒店等商業場所,攝像頭模組可用于人流統計、行為分析等方面。通過實時監測和分析顧客行為,商家可以了解顧客需求、優化商品布局、提升顧客服務體驗。
同時,模組還能及時發現并處理異常情況,如盜竊、斗毆等,保障商業環境的安全穩定。
公共安全監控:
在城市交通、社區、景區等公共場所,攝像頭模組發揮著至關重要的作用。它們不僅能夠進行實時監控,還能通過視頻分析預測潛在風險,提供預警服務,有效預防犯罪和安全事故的發生。
在緊急情況下,模組還能為救援人員提供重要的現場信息和指導。
工業制造監控:
在生產線、倉庫、工廠等工業制造領域,攝像頭模組可用于物料追蹤、產品質量檢測等方面。通過實時監測生產線上的物料流動和產品質量信息,企業可以及時發現并解決問題,提高生產效率和產品質量。
同時,模組還能為安全生產提供有力保障,防止事故的發生。
農業監控:
在農業領域,攝像頭模組可用于農田、溫室等場所的遠程監控。通過實時監測植物生長狀況、土壤濕度、環境溫度等信息,農民可以更加精準地進行田間管理,提高農作物的產量和品質。
同時,模組還能及時發現并處理病蟲害等問題,減少農藥和化肥的使用量,實現綠色農業的發展目標。
智能交通系統:
在智能交通系統中,攝像頭模組可以用于交通流量監控、違章行為識別等,提高交通管理效率和安全性。
智能機器人與無人機:
攝像頭模組可以作為智能機器人和無人機的視覺導航系統,通過捕捉環境信息實現自主導航和避障功能。
醫療與教育:
在醫療領域,攝像頭模組可以結合人工智能算法進行遠程診斷和病情分析,提高醫療服務的效率和準確性。
在教育領域,攝像頭模組可以實現遠程教學和互動學習,為師生提供更為便捷和高效的教學方式。
綜上所述,物聯網系統中使用攝像頭模組的原因主要包括數據采集與實時監控、智能分析與決策支持、用戶體驗提升以及安全性與隱私保護等方面。這些優勢使得攝像頭模組在物聯網領域得到了廣泛的應用和認可。
本文會再為大家詳解傳感外設家族中的一員——攝像頭模組。
01
攝像頭模組的定義
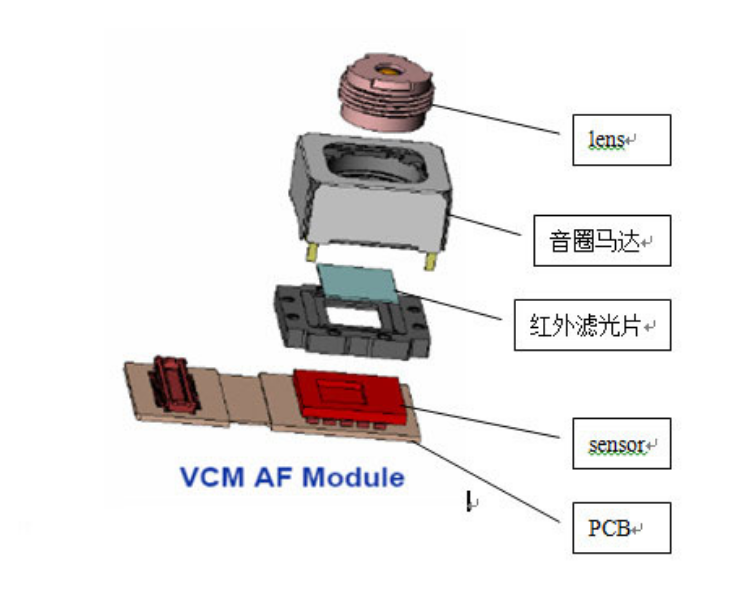
攝像頭模組,全稱CameraCompact Module,簡寫為CCM。CCM 包含四大件: 鏡頭(lens)、傳感器(sensor)、軟板(FPC)、圖像處理芯片(DSP)。決定一個攝像頭好壞的重要部件是:鏡頭(lens)、圖像處理芯片 (DSP)、傳感器(sensor)。CCM的關鍵技術為:光學設計技術、非球面鏡制作技術、光學鍍膜技術。決定一個攝像頭好壞的重要部件是:鏡頭(lens)、圖像處理芯片 (DSP)、傳感器(sensor)。
02
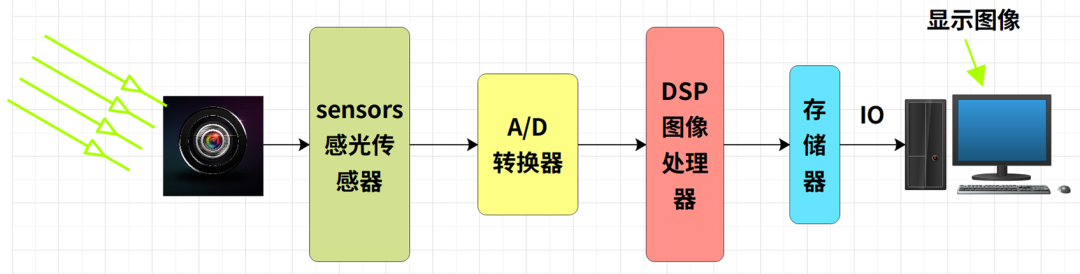
攝像頭模組的原理
景物(SCE)通過鏡頭(LENS)生成的光學圖像投射到圖像傳感器(Sensor)表面上然后轉為電信號,經過A/D(模數轉換)轉換后變為數字圖像信號再送到數字信號處理芯片(DSP)中加工處理,轉換成標準的RGB、YUV等格式圖像信號再通過I/O接口傳輸到CPU中處理,通過display就可以看到圖像了
03
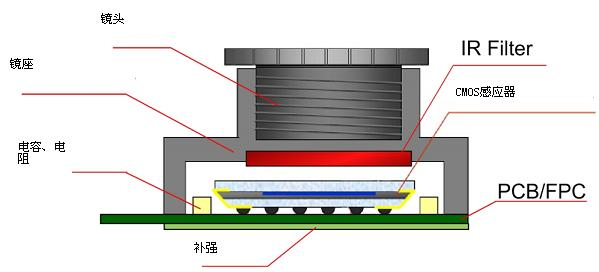
攝像頭模組的硬件組成
4.1 Lens(鏡頭)
Lens是一個能夠接收光信號并匯聚光信號于感光器件CMOS/CCD的裝置。Lens決定sensor的采光率,其整體效果相對于一個凸透鏡。
一般camera的鏡頭結構是由幾片透鏡組成,分有塑膠透鏡(PLASTIC)和玻璃透鏡(GLASS),通常CAMERA用的鏡頭結構有:1P,2P,1G1P,1G3P,2G2P,4G,8P等。透鏡越多,成本越高;玻璃透鏡比塑膠透鏡貴,但是玻璃透鏡的成像效果比塑膠透鏡的成像效果要好。目前市場上針對mobile phone配置的camera以1G3P(1片玻璃透鏡和3片塑膠透鏡組成)為主,目的是降低成本。
4.1.1 Lens主要指標
A、消除盡可能多Flare
B、畫質清晰度
C、CRA(Chief Ray Angle主光線角度)要match,減少shading(Lens cra < Sensor CRA, 相差最好在2度以內)
D、光圈盡可能的大
E、Distortion 盡可能的輕微等
3.1.2 Lens主要參數
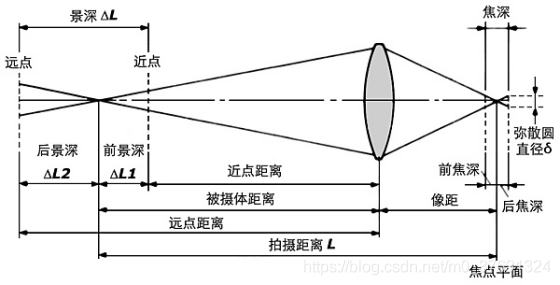
(1)焦距:鏡頭焦距的長短決定著拍攝的成像大小,視場角大小,景深大小和畫面的透視強弱。一般來說對于單片鏡頭就是鏡頭中心到焦點的距離,而相機鏡頭是由多片透鏡組合,就要復雜許多。這里焦距就指的是從鏡頭的中心點到感光元器件(CCD)上所形成的清晰影像之間的距離。
(2)視場角:我們常用水平視場角來反映畫面的拍攝范圍。焦距f越大,視場角越小,在感光元件上形成的畫面范圍越小;反之,焦距f越小,視場角越大,在感光元件上形成的畫面范圍越大。
(3)F值(口徑比):F 值即指鏡頭之明亮度(即鏡頭的透光量)。F=鏡頭焦距/光圈直徑。F值相同,長焦距鏡頭的口徑要比短焦距鏡頭口徑大。
(4)光圈:光圈是位于鏡頭內部的、可以調節的光學機械性闌孔,可用來控制通過鏡頭的光線的多少。可變光圈(Iris diaphragm)。鏡頭內部用來控制闌孔大小的機械裝置。或指用來打開或關閉鏡頭闌孔,從而調節鏡頭的f-stop的 裝置。
(5)景深:當某一物體聚焦清晰時,從該物體前面的某一段距離到其后面的某一段距離內的所有景物也都相當于是清晰的。焦點相當清晰的這段從前到后的距離就叫做景深
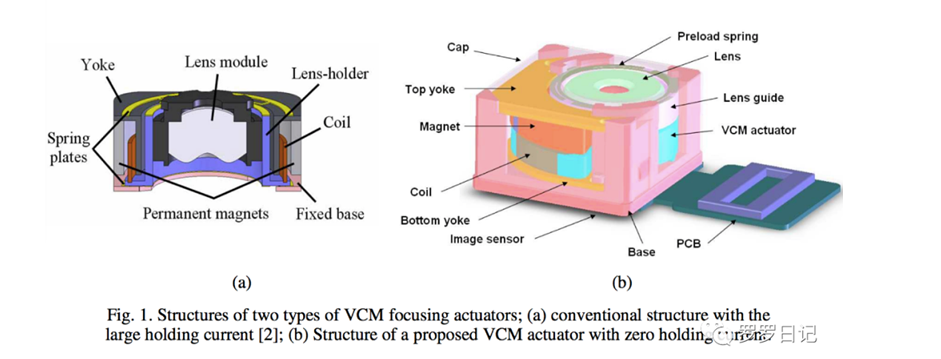
3.2 VCM(Voice Coil Motor)音圈馬達

全稱Voice Coil Montor,電子學里面的音圈電機,是馬達的一種。因為原理和揚聲器類似,所以叫音圈電機,具有高頻響、高精度的特點。其主要原理是在一個永久磁場內,通過改變馬達內線圈的直流電流大小,來控制彈簧片的拉伸位置,從而帶動上下運動。手機攝像頭廣泛的使用VCM實現自動對焦功能,通過VCM可以調節鏡頭的位置,呈現清晰的圖像。
音圈電機用于微攝像頭調焦/音圈電機用于微攝像頭調焦/音圈電機用于調焦
3.2.1 VCM性能指標
VCM的性能主要是看電流和行程距離的比值。從啟動電流開始,電流上升要和所能驅動的行程距離成比例,所需要上升電流越小,精度越高,同時還看最大耗電量,最大功率,尺寸大小。
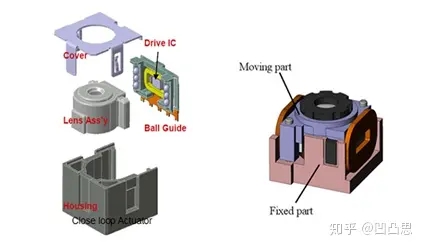
3.2.2 VCM分類
從結構上大致可分三類: (1)彈片式結構 ;(2)滾珠式結構; (3)摩擦式結構。
從功能上大致分為五類: (1)Open loop開馬達; (2)Close loop閉環馬達 ;(3)Alternate中置馬達 ;(4)OIS光學防抖馬達(分平移式、移軸式、記憶金屬式等);(5) OIS+Close loop六軸馬達 。
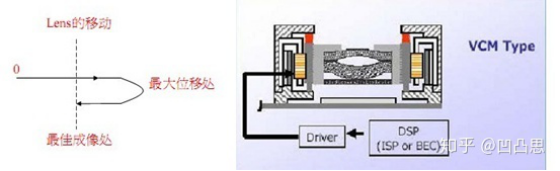
3.2.3 AF原理
進入自動調焦模式后,Driver從0到最大值,使得鏡頭從原地移動到最大位移處,此時sensor成像面自動拍攝圖片保存到DSP內,DSP通過這些圖片,計算每一副圖片的MTF(Modulation transfer function)值,從而在這條MTF曲線中找到最大值,并通過算法,得到這個點對應的電流大小,再一次指示Driver提供給音圈這個電流,而使鏡頭穩定在這個成像面,使得達到自動變焦。
3.2.4 變焦和對焦
A:實現光學變焦采用變焦馬達(ZOOM)
通過移動鏡頭內部的鏡片來改變焦點的位置,改變鏡頭焦距的長短,并改變鏡頭的視角大小,從而實現影響的放大與縮小。
B:實現自動對焦采用對焦馬達(AF)
過微距離移動整個鏡頭(而不是鏡頭內的鏡片)的位置,控制鏡頭焦距的長短,而實現影像 的清晰.手機中常用的方法。
光學對焦和光學變焦是不同的概念:
光學變焦是通過移動鏡頭內部鏡片的相對位置來改變焦點的位置,改變鏡頭焦距的長短,并改變鏡頭的視角大小,從而實現影像的放大與縮小;
光學對焦是實際上是調整整個鏡頭的位置(而不是鏡頭內的鏡片)的位置,控制鏡頭焦距的長短,而實現影像的清
晰.手機中常用的方法。目前VCM是使用最廣泛的對焦方式.
DW9763 馬達驅動移植
馬達驅動一般比較簡單,只需要按照時序控制,設置位置的寄存器即可控制馬達移動,這里以RK3588安卓12平臺,移植DW9763馬達驅動為例,內核版本為kernel-5.10。
①從馬達規格書獲取控制時序圖和控制模式
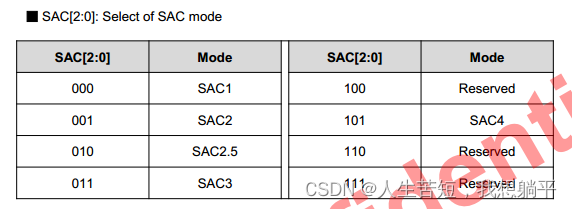
datesheet一般都有描述馬達所支持的控制模式和控制時序,如DW9763就支持,Direct mode和SAC mode,SAC mode分為SAC1,SAC2,SAC2.5,SAC3,SAC4,具體的模式選擇有寄存器可以配置:
控制時序一般如下:
A. 設置Ringing control寄存器:這個寄存器設置是direct mode還是ringingmode
B. 設置具體的SAC mode和DIV
C. 設置Tvib
D. 向寄存器設置DAC
②驅動實現
驅動的關鍵點如下:
A. 設備資源的獲取;RK私有資源定義,命名方式如rockchip,camera-module-xxx,主要是提供設備參數和Camera設備進行匹配。VCM參數定義,命名方式如rockchip,vcm-xxx,主要涉及硬件參數啟動電流、額定電流、移動模式,參數跟馬達移動的范圍和速度相關。
B. entity.function的指定,與camera sensor驅動不同,馬達驅動注冊的需要指定為:MEDIA_ENT_F_LENS
C. v4l2_subdev_core_ops:設置ioctl回調接口,目前使用了私有的ioctl實現馬達移動時間的查詢:RK_VIDIOC_VCM_TIMEINFO;;
D. v4l2_ctrl_ops:實現dw9763_get_ctrl和dw9763_set_ctrl,也就是獲取和設置馬達的位置接口,即對V4L2_CID_FOCUS_ABSOLUTE這個ioctl進行支持。
E. RK AF算法將模組鏡頭整個可移動行程的位置參數定義為[0,64],模組鏡頭整個可移動行程在VCM驅動電流上對應的變化范圍為[啟動電流,額定電流],該函數中建議實現這2者間的映射換算關系;
static int dw9763_set_pos(struct dw9763_device *dev_vcm,
unsigned int dest_pos)
{
int ret;
unsigned int position = 0;
struct i2c_client *client = dev_vcm->client;
u32 is_busy, i;
if (dest_pos >= VCMDRV_MAX_LOG)
position = dev_vcm->start_current;
else
position = dev_vcm->start_current +
(dev_vcm->step * (VCMDRV_MAX_LOG - dest_pos));
if (position > DW9763_MAX_REG)
position = DW9763_MAX_REG;
dev_vcm->current_lens_pos = position;
dev_vcm->current_related_pos = dest_pos;
for (i = 0; i < 100; i++) {
ret = dw9763_read_reg(client, 0x05, 1, &is_busy);
if (!ret && !(is_busy & 0x01))
break;
usleep_range(100, 200);
}
ret = dw9763_write_reg(client, 0x03, 2, dev_vcm->current_lens_pos);
if (ret != 0)
goto err;
dev_dbg(&client->dev,
"%s: set reg val %dn", __func__, dev_vcm->current_lens_pos);
return ret;
err:
dev_err(&client->dev,
"%s: failed with error %dn", __func__, ret);
return ret;
}
③dts配置
dts配置參考如下:
dw9763: dw9763@c {
compatible = "dongwoon,dw9763";
status = "okay";
reg = <0x0c>;
rockchip,vcm-max-current = <120>;
rockchip,vcm-start-current = <20>;
rockchip,vcm-rated-current = <90>;
rockchip,vcm-step-mode = <3>;
rockchip,vcm-t-src = <0x20>;
rockchip,vcm-t-div = <1>;
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "back";
};
ov13855: ov13855@36 {
......
lens-focus = <&dw9763>;
......
};
vcm-max-current設置最大電流,vcm-start-current設置啟動電流,vcm-rated-current設置額定電流,vcm-step-mode設置VCM的模式。
④安卓上層配置
如果支持VCM的話,安卓XML需要添加對應的AFmode支持,camera3_profiles.xml添加如下:
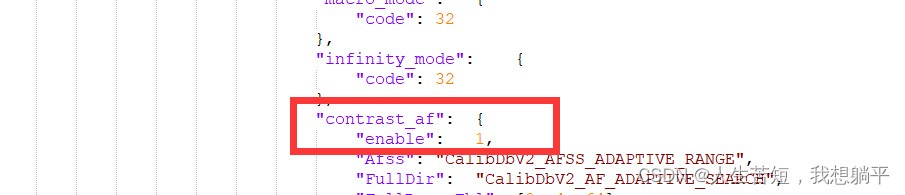
⑤JSON效果文件配置
效果文件需要打開AF:
⑥調試命令
上述效果文件打開會自動對焦,調試的時候可以將上述關掉,手動使用命令控制馬達移動:
v4l2-ctl -d /dev/v4l-subdev3 --set-ctrl 'focus_absolute=64'
v4l2-ctl -d /dev/v4l-subdev3 --set-ctrl 'focus_absolute=0'
3.3 IR-CUT

自然界存在著各種波長的光線,人眼識別光線的波長范圍在320nm-760nm之間, 超過320nm-760nm的光線人眼就無法見到;而攝像機的成像元器件CCD或CMOS可以看到絕大部分波長的光線。由于各種光線的參與,攝像機所還原出的顏色與肉眼所見在色彩上存在偏差。如綠色植物變得灰白,紅色圖畫變成淺紅色,黑色變成紫色等。在夜間由于雙峰濾光片的過濾作用,使CCD不能充分利用所有光線,不產生雪花噪點現象及其低照性能難以令人滿意。為了解決這個問題,就使用IR-CUT雙濾鏡。
IR-CUT雙濾鏡是指在攝像頭鏡頭組里內置了一組濾鏡,當鏡頭外的紅外感應點偵測到光線的強弱變化后,內置的IR-CUT自動切換濾鏡能夠根據外部光線的強弱隨之自動切換,使圖像達到最佳效果。也就是說,在白天或黑夜下,雙濾光片能夠自動切換濾鏡,因此不論是在白天還是黑夜下,都能得到最佳成像效果。
3.3.1 IR-CUT 組成及原理
IR CUT雙濾光片切換器由一個紅外截止低通濾光片(一片紅外截止或吸收濾光片)、一個全光譜光學玻璃(一片全透光譜濾光片)、動力機構(可以是電磁、電機或其他動力源)以及外殼組成,它通過一塊電路控制板來進行切換、定位。當白天的光線充分時,電路控制板驅使切換器切換并定位到紅外截止濾光片工作,CCD或CMOS還原出真實色彩;當夜間可見光不足時,紅外截止濾光片自動移開,全光譜光學玻璃開始工作,這時,它能感應紅外燈的紅外光,使CCD或CMOS充分利用到所有光線,從而大大提高了紅外攝像機的夜視性能,整個畫面也就清晰自然了。
3.3.2 IR-CUT指標
a、濾光片的紅外線截止程度,透光率,和光整形效果等。
b、動力驅動部分
c、控制電路
d、濾光片:一般用鍍膜(IR Coating)的方法或藍玻璃來濾除紅外光。
3.4 Sensor
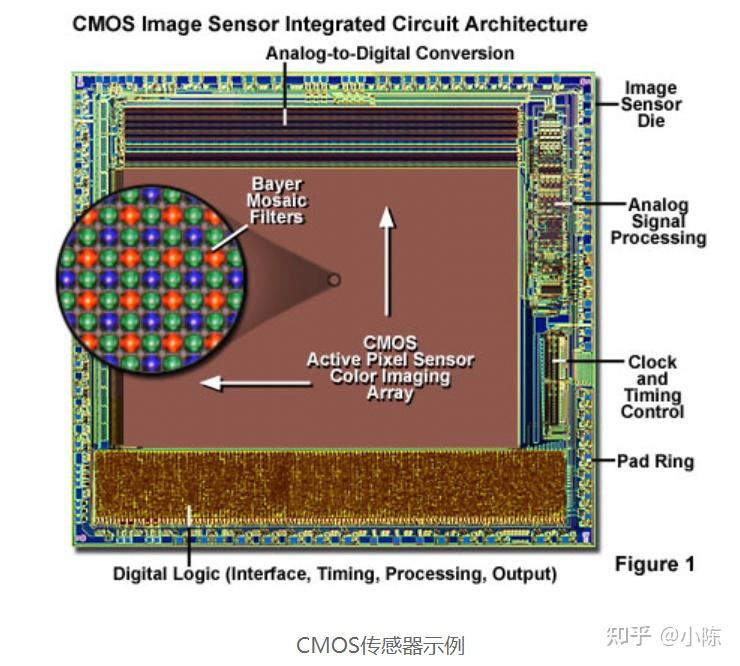
Image sensor(圖像傳感器)是一種半導體芯片,其表面有幾百萬到幾千萬個光電二極管,光電二極管受到光照就會產生電荷,將光線轉換成電信號。其功能類似于人的眼睛,因此sensor性能的好壞將直接影響到camera的性能。
3.4.1 Sensor結構
3.4.2分類
感光原件:CCD、CMOS(PPS和APS)
CCD(Charge Coupled Device)是貝爾實驗室在1969年研發成功的,后經索尼、松下、夏普等公司改進并批量生產。十多年前,以CCD作為感光元件相機多一些,如尼康的D3000等,但現在越來越少。
CCD感光元件具有噪點小、反映靈敏度高、動態范圍大等優勢,所以作為相機成像的感光元件,所成像的質量要更好,但因為其制作成本高、制作工藝復雜、價格昂貴、耗電高等劣勢,不利于進一步推廣,并且CCD的尺寸越大,越難以生產,制作成本越高。
CMOS(Complementary Metal Oxide Semiconductor)感光元件是在二十世紀八十年代誕生的,當時電子技術水平相對落后,特別是系統集成這一領域,因此CMOS感光元件的成品質量一直不高,并且生產效率低下,所以CMOS感光元件的普及率不足。隨著系統集成技術的發展,世界上主流的影像傳感器廠商已經能夠快速、高質量地生產尺寸較大的CMOS,并且這種感光元件的成像質量在一定程度上也達到了CCD所能達到的水平,當前的主流數碼單反相機均采用了CMOS感光元件,只有部分卡片機和高端中畫幅相機仍然使用CCD感光元件。`
不同工藝:前照式FSI、背照式BSI、堆棧式
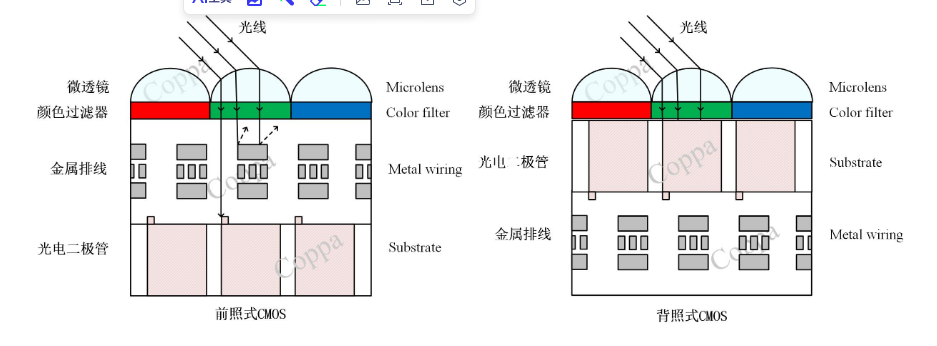
對于FSI(Front side illumination)技術而言,光是從前面的金屬排線之間進入,然后再聚焦在光電二極管上。這帶來的結果就是在金屬排線這層光線會被部分阻擋和反射掉,而光電二極管吸收的光線就只有剛進來時候的70%或更少;且這種反射還有可能串擾旁邊的像素,導致顏色失真。
采用BSI(Back side illumination)技術來構建像素,光線無需穿過金屬排線層,光線幾乎沒有阻擋和干擾地就到達光電二極管,光線利用率極高,所以背照式CMOS傳感器能更好的利用射入的光線。
FSI和BSI為非堆棧式結構,堆棧式的結構首先由SONY應用在了Exmor RS 產品上。對于像素區域的制造工藝,可以使用65nm的制程,但對于處理電路的區域,如果能用45nm的制程制造,那么在處理電路上的晶體管數量就能翻倍,這樣,像素處理的速度就更快。
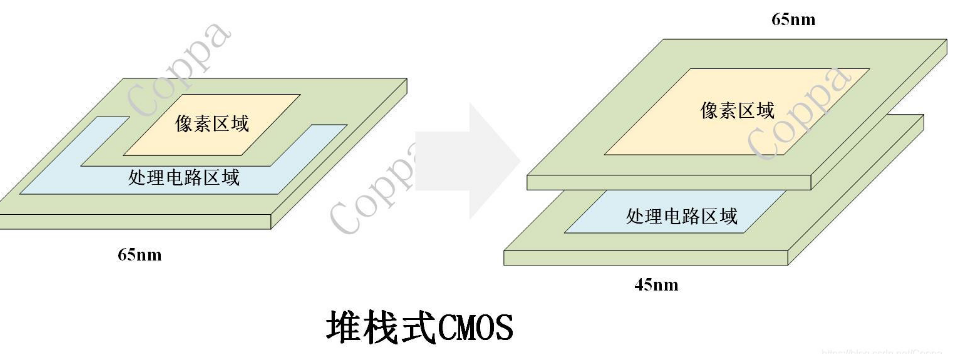
由于像素部分和電路部分獨立,因此像素部分可針對高畫質優化,電路部分可針對高性能優化。堆棧式不僅繼承了背照式的優點(像素區域依然是背照式),還克服了其在制作上的限制與缺陷。因為處理回路的改善和進步,攝像頭也將能提供更多的功能,比如說硬件HDR,慢動作拍攝等等。像素與處理回路分家的同時,攝像頭的體積也會變得更小,但功能和性能卻不減,反而更佳。像素區域(CMOS的尺寸)可以相應地增大,用來種植更多或者更大的像素。
3.4.3 指標
常見縮略語
td {white-space:nowrap;border:1px solid #dee0e3;font-size:10pt;font-style:normal;font-weight:normal;vertical-align:middle;word-break:normal;word-wrap:normal;}
| 名稱 | 含義 |
| 3A算法 | AEC, AWB, AF算法 |
| AEC | Auto Exposure Control, 自動曝光控制 |
| AWB | Auto White Balance, 自動白平衡 |
| AF | Auto Focus, 自動對焦 |
| TE | Time Exposure, 曝光時間 |
| FBC | Frame Buffer Compressed, 幀緩沖壓縮 |
| IQ | Image Quality, 圖像質量 |
A. 圖像壓縮方式JPEG
(joint photographic expert group)靜態圖像壓縮方式。一種有損圖像的壓縮方式。壓縮比越大,圖像質量也就越差。 當圖像精度要求不高存儲空間有限時,可以選擇這種格式。目前大部分數碼相機都使用JPEG格式。
B. 圖像噪音
指的是圖像中的雜點干擾,表現為圖像中有固定的彩色雜點。
C. 白平衡處理技術(AWB)
白平衡指不管在任何光源下,都能將白色物體還原為白色。白平衡是描述顯示器或相機中紅、綠、藍三基色混合生成后白色精確度的一項指標。色溫表示光譜成份,光的顏色。色溫低表示長波光成分多。當色溫改變時,光源中三基色(紅、綠、藍)的比例會發生變化,需要調節三基色的比例來達到彩色的平衡,這就是白平衡調節的實際。
圖象傳感器的圖象數據被讀取后,系統將對其進行針對鏡頭的邊緣畸變的運算修正,然后經過壞像處理后被系統送進去進行白平衡處理(在不同的環境光照下,人類的眼睛可以把一些“白”色的物體都看成白色,是因為人眼進行了修正。但是SENSOR沒有這種功能,因此需要對SENSOR輸出的信號進行一定的修正,這就是白平衡處理技術)。
D. 彩色深度(色彩位數)
反映對色彩的識別能力和成像的色彩表現能力,就是用多少位的二進制數字來記錄三種原色。實際就是A/D轉換器的量化精度,是指將信號分成多少個等級,常用色彩位數(bit)表示。彩色深度越高,獲得的影像色彩就越艷麗動人。非專業的SENSOR一般是24位;專業型SENSOR至少是36位。24位的SENSOR,感光單元能記錄的光亮度值最多有2^8=256級,每一種原色用一個8位的二進制數字來記錄,最多記錄的色彩是256×256×256約16,77萬種。36位的SENSOR,感光單元能記錄的光亮度值最多有2^12=4096級,每一種原色用一個12位的二進制數字來記錄,最多記錄的色彩是4096×4096×4096約68.7億種。
E. 圖像格式(image Format/ Color space)
像素格式,比如: RGB24,RGB565,RGB444,YUV4:2:2等。 RGB24,I420是目前最常用的兩種圖像格式。
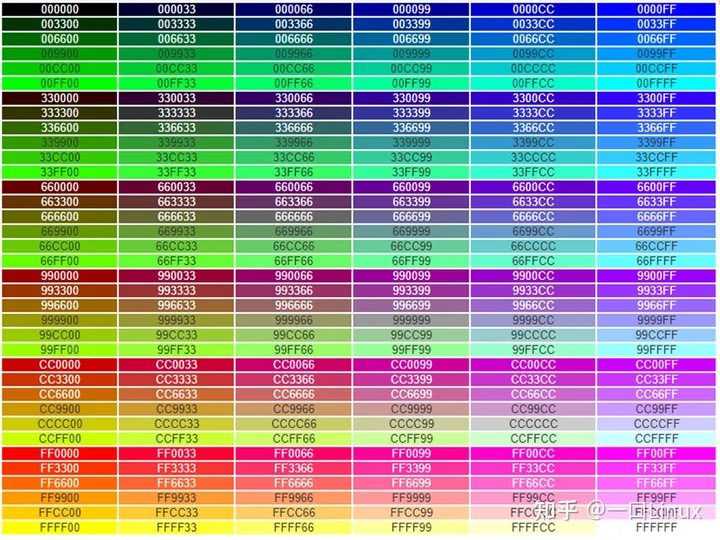
RGB24 表示R、G、B ,3種基色都用8個二進制位表示,那么紅色、綠色、藍色各有256種,那么由這三種基色構成的顏色就是256X256X256=16,777,216種,約等于1677萬。這就是計算機表示顏色的原理,同樣也是手機屏幕和顯示器屏幕等顯示顏色的原理。
顏色對應RGB值
YUV YUV 和我們熟知的 RGB 類似,是一種顏色編碼格式。 YUV 包含三個分量,其中 Y 表示明亮度(Luminance 或 Luma),也就是灰度值。 而 U 和 V 則表示色度(Chrominance 或 Chroma),作用是描述圖像色彩及飽和度,用于指定像素的顏色。 沒有 UV 分量信息,一樣可以顯示完整的圖像,只不過是黑白的灰度圖像。 YUV的采樣方式
4:4:4表示完全取樣(每一個Y對應一組UV分量)
4:2:2表示2:1的水平取樣,垂直完全采樣(每兩個Y共用一組UV分量)
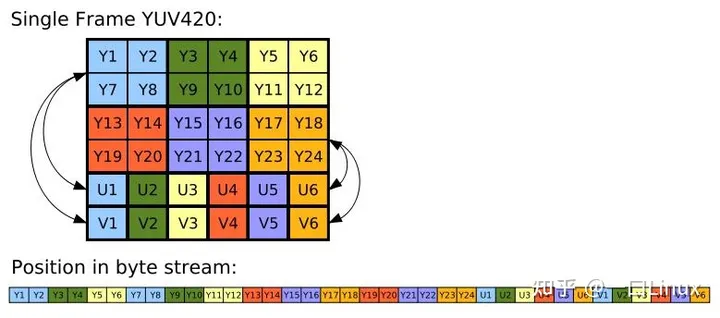
4:2:0表示2:1的水平取樣,垂直2:1采樣(每四個Y共用一組UV分量)
4:1:1表示4:1的水平取樣,垂直完全采樣(每四個Y共用一組UV分量)
存儲方式舉例:
YUV 4:2:0其顏色的一種存放格式如圖所示:
F. 分辨率(Resolution)
所謂分辨率就是指畫面的解析度,由多少像素構成的數值越大,圖像也就越清晰。分辨率不僅與顯示尺寸有關,還會受到顯像管點距、視頻帶寬等因素的影響。
我們通常所看到的分辨率都以乘法形式表現的,比如1024*768,其中的1024表示屏幕上水平方向顯示的點數,768表示垂直方向的點數。
td {white-space:nowrap;border:1px solid #dee0e3;font-size:10pt;font-style:normal;font-weight:normal;vertical-align:middle;word-break:normal;word-wrap:normal;}
| 解析度 | 分辨率 乘法 | 像素值 | 像素值簡稱 |
| QSIF/QQVGA | 160 x 120 | 19200 | |
| QCIF | 176 x 144 | 25344 | |
| SIF/QVGA | 320 x 240 | 76800 | |
| CIF | 352 x 288 | 101376 | 10萬像素 |
| VGA | 640 x 480 | 307200 | 30萬像素(35萬是指648X488) |
| SVGA | 800 x 600 | 480000 | |
| XGA | 1024 x 768 | 786438 | 80萬像素 |
| SXGA | 1280 x 1024 | 1310720 | 130萬像素 |
| UXGA | 1600 x 1200 | 1920000 | 200萬像素 |
| QXGA | 2048 x 1536 | 3145728 | 300萬像素(320W) |
| QSXGA | 2592 x 1944 | 5038848 | 500萬像素 |
| 2816 x 2112 | 2947392 | 600萬像素 | |
| 3072 x 2304 | 7077888 | 700萬像素 | |
| 3200 x 2400 | 7680000 | 770萬像素 | |
| 3264 x 2448 | 7990272 | 800萬像素 | |
| 3876 x 2584 | 10015584 | 1000萬像素 |
G. 碼流
碼流就是指視頻數據在單位時間內的數量大小,也叫碼率,是視頻編碼畫面質量控制中最重要的部分,同樣的分辨率和幀率下,視頻碼流越大,畫面質量越高,對應的存儲容量也就越大。
H. 曝光
曝光就是圖像的明暗程度 ,照片太暗稱為曝光不足 ,照片太亮稱為曝光過度。曝光由光圈、曝光時間、ISO三者共同決定。
光圈: 控制進光量。
曝光時間: 光到達的時間長度。
ISO: 增益,或稱為感光度。
I. 像素
傳感器上有許多感光單元,它們可以將光線轉換成電荷,從而形成對應于景物的電子圖像。而在傳感器中,每一個感光單元對應一個像素(Pixels),像素越多,代表著它能夠感測到更多的物體細節,從而圖像就越清晰,像素越高,意味著成像效果越清晰。攝像機分辨率的乘積就是像素值,例如:1280×960=1228800
J. 靶面尺寸
圖像傳感器感光部分的大小,一般用英寸來表示。和電視機一樣,通常這個數據指的是這個圖像傳感器的對角線長度,如 常見的有1/3英寸,靶面越大,意味著通光量越好,而靶面越小則比較容易獲得更大的景深。
K. 感光度
即是通過CCD或CMOS以及相關的電子線路感應入射光線的強弱。感光度越高,感光面對光的敏感度就越強,快門速度就越高,這在拍攝運動車輛,夜間監控的時候尤其顯得重要。
L. 電子快門
是比照照相機的機械快門功能提出的一個術語。其控制圖像傳感器的感光時間,由于圖像傳感器的感光值就是信號電荷的積累,感光越長,信號電荷積累時間也越長,輸出信號電流的幅值也越大。電子快門越快,感光度越低,適合在強光下拍攝。
M. 幀率
既指單位時間所記錄或者播放的圖片的數量。連續播放一系列圖片就會產生動畫效果,根據人類的視覺系統,當圖片的播放速度大于15幅/秒(即15幀)的時候, 人眼就基本看不出來圖片的跳躍;在達到24幅/s——30幅/s(即24幀到30幀)之間時就已經基本覺察不到閃爍現象了。
每秒的幀數(fps)或者說幀率表示圖形傳感器在處理場時每秒鐘能夠更新的次數。高的幀率可以得到更流暢、更逼真的視覺體驗。
N. 信噪比
是信號電壓對于噪聲電壓的比值,信噪比的單位用dB來表示。一般攝像機給出的信噪比值均是AGC(自動增益控制)關閉時的值,因為當AGC接通時,會對小信號進行提升,使得噪聲電平也相應提高。
信噪比的典型值為45——55dB,若為50dB,則圖像有少量噪聲,但圖像質量良好;若為60dB,則圖像質量優良,不出現噪聲,信噪比越大說明對噪聲的控制越好。這個參數關系的圖像中噪點的數量,信噪比越高,給人感覺畫面越干凈,夜視的畫面中點狀的噪點就越少。
3.5 DSP
數字信號處理器DSP(DIGITAL SIGNAL PROCESSING)功能:主要是通過一系列復雜的數學算法運算,對數字圖像信號參數進行優化處理,并把處理后的信號通過USB等接口傳到PC等設備
3.5.1 DSP和ISP區別
名詞解釋:
ISP 是Image Signal Processor 的簡稱,也就是圖像信號處理器。
DSP是Digital Signal Processor 的縮寫,也就是數字信號處理器。
在介紹Camera ISP和DSP區別前,我們先看看Camera的工作流程
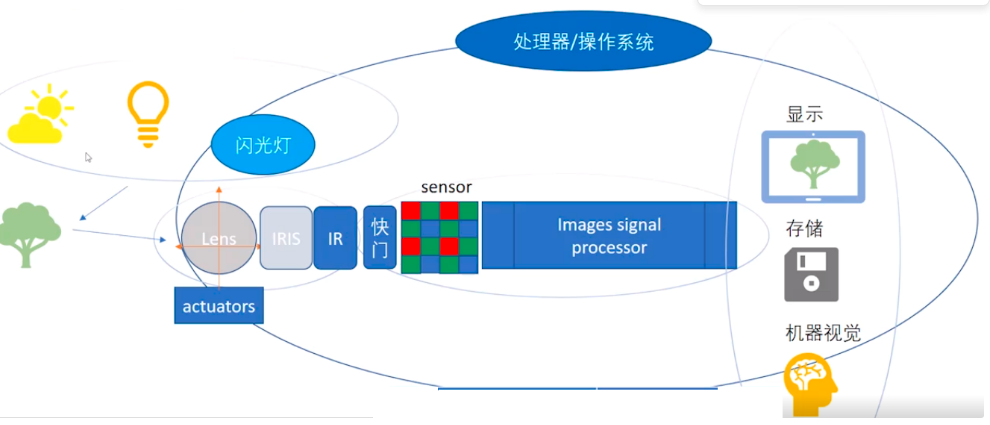
拍攝景物通過鏡頭,將生成的光學圖像投射到傳感器上,然后光學圖像被轉換成電信號,電信號再經過模數轉換變為數字信號,數字信號經過DSP加工處理,再被送到電腦中進行處理,最終轉換成手機屏幕上能夠看到的圖像。
數字信號處理器DSP(DIGITAL SIGNAL PROCESSING)功能:主要是通過一系列復雜的數學算法運算,對數字圖像信號參數進行優化處理,并把處理后的信號通過USB等接口傳到PC等設備。DSP結構框架:
ISP(image signal processor)(圖像信號處理器)
JPEG encoder(JPEG圖像解碼器)
USB device controller(USB設備控制器)
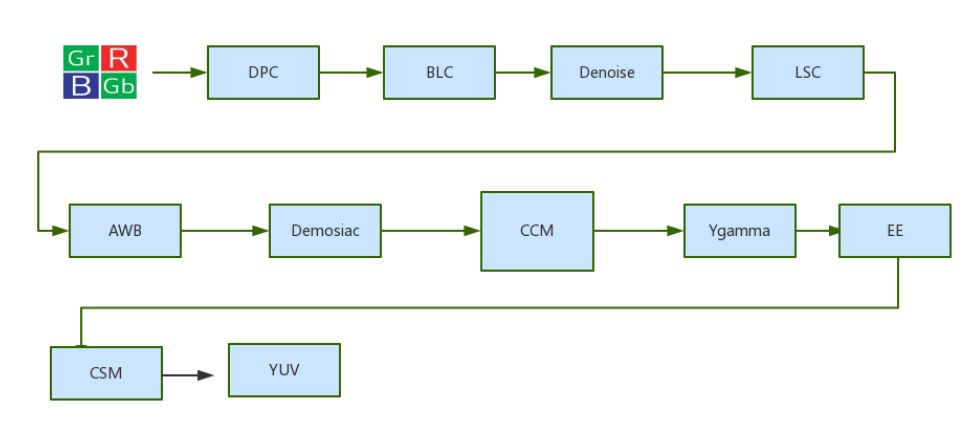
ISP一般用來處理Image Sensor(圖像傳感器)的輸出數據,如做AEC(自動曝光控制)、AGC(自動增益控制)、AWB(自動白平衡)、色彩校正、Lens Shading、Gamma 校正、祛除壞點、Auto Black Level、Auto White Level 等等功能的處理。
DSP功能就比較多了,它可以做些拍照以及回顯(JPEG的編解碼)、錄像以及回放(Video 的編解碼)、H.264的編解碼、還有很多其他方面的處理,總之是處理數字信號了。
ISP是一類特殊的處理圖像信號的DSP。
04
攝像頭模組的分類及相關概念
4.1 按接口分
4.1.1 USB接口
UVC,全稱 USB Video Class 、是 USB-IF 定制的一套標準,所有遵循這一標準的 USB 接口攝像頭在 Windows Linux 等系統下,幾乎能直接使用,達到類似免驅的效果。
當然了,并不是說真正的不需要驅動,而是只要某個 USB 接口的攝像頭遵循了 UVC標準,它就能被 Window、Linux 系統中一套通用的驅動所驅動,而不需要你再安裝其他的驅動。比如 Linux 內核中就有一套針對 UVC 設備的通用驅動:drivers/media/usb/uvc , 只要打開了這套驅動,幾乎所有的 UVC 攝像頭都可以直接使用。
4.1.2 MIPI接口
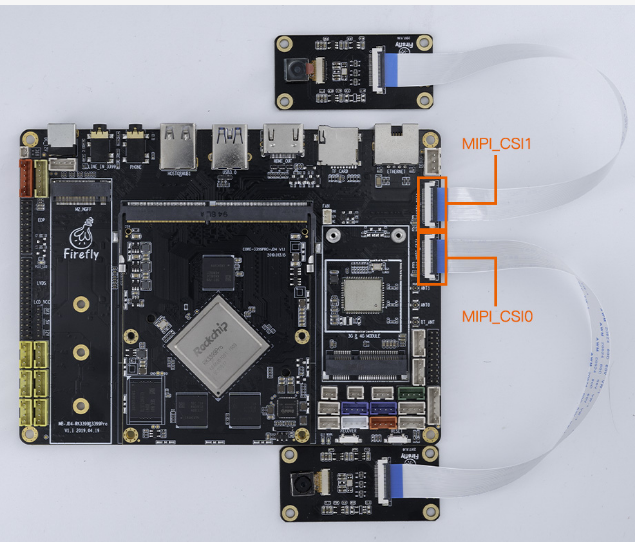
MIPI(移動行業處理器接口)是Mobile Industry Processor Interface的縮寫。MIPI是MIPI聯盟發起的為移動應用處理器制定的開放標準。常見的智能手機上的攝像頭是MIPI接口,CSI是相機串行接口(CMOS Sensor Interface)的簡稱。
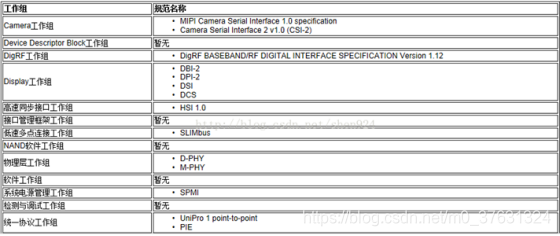
MIPI 組織致力于把移動通信設備內部的接口標準化從而減少兼容性問題并簡化設計。例如攝像頭接口CSI、顯示接口DSI、射頻接口DigRF、麥克風/喇叭接口SLIMbus等。
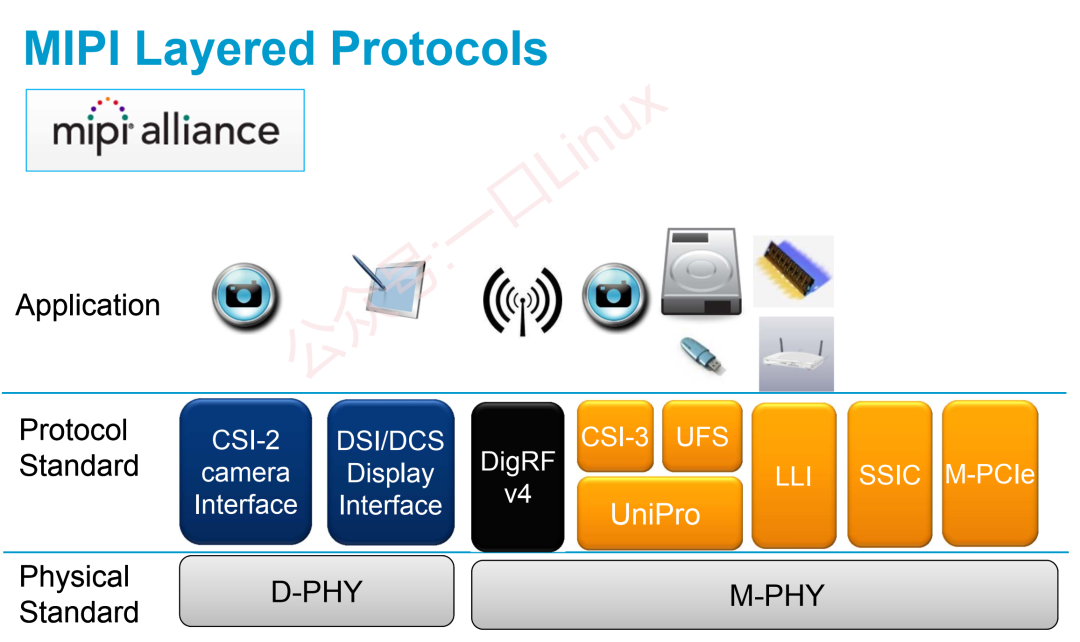
MIPI總線速率lvds接口耦合,走線必須差分等長,并且需要保護,故對PCB走線以及阻抗控制要求高一點(一般來講差分阻抗要求在85歐姆~125歐姆之間)MIPI是LVDS低壓差分串口,只需要要CLKP/N、DATAP/N——最大支持4-lane,一般2-lane即可。MIPI接口比DVP的接口信號線少,由于是低壓差分信號,產生的干擾小,抗干擾能力也強。DVP接口在信號完整性方面受限制,速率也受限制。500W還可以勉強用DVP,800W及以上都采用MIPI接口。所以高清攝像頭我們都選用MIPI接口 。
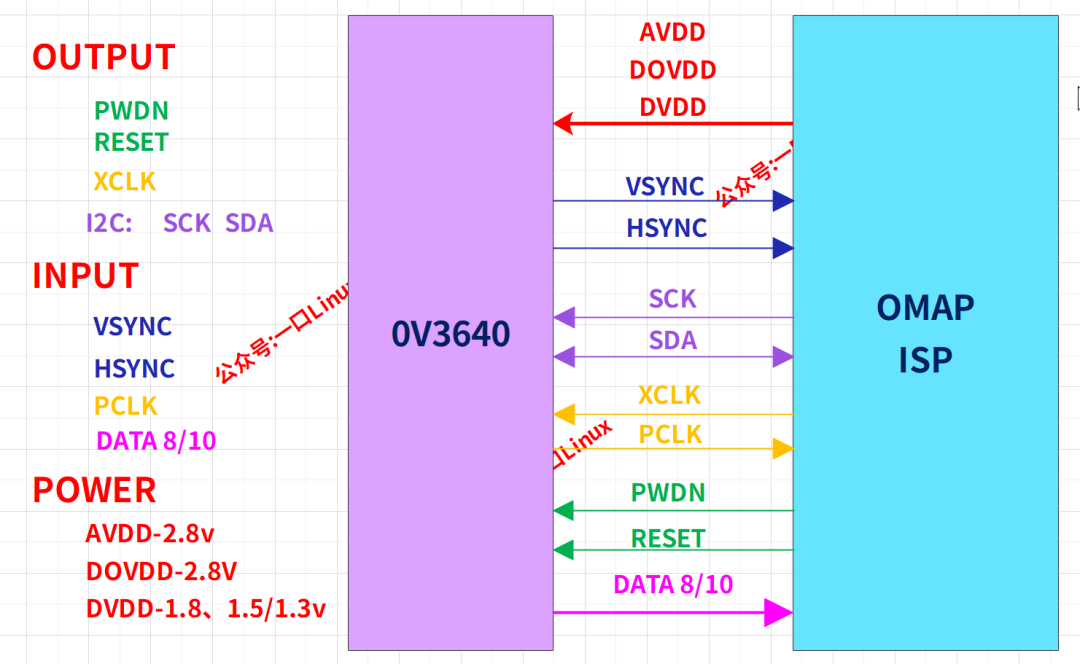
4.1.3 DVP接口

還有一部分的攝像頭(比如說某些支持DVP接口的硬件)是DVP(Digital Video Port)攝像頭數據并口傳輸協議,
DVP是并口,提供8-bit或10-bit并行傳輸數據線、HSYNC(Horizontal sync)行同步線、VSYNC(Vertical sync)幀同步線和PCLK(Pixel Clock)時鐘同步線。
DVP總線PCLK極限約在96M左右,而且走線長度不能過長,所有DVP最大速率最好控制在72M以下,PCB layout較容易畫
以OV3640攝像頭為例:
DVP分為三個部分:
輸出總線輸入總線電源總線
LVDS接口:LVDS(Low Voltage Differential Signaling)即低壓差分信號傳輸
4.1.4 網口:IPC網絡攝像頭
4.1.5 SDI接口:專業視頻接口,采用同軸電纜的,走數字信號,現在有18GHz帶寬的產品,可以滿足8K視頻傳輸。
4.1.6 RGB接口:模擬視頻接口,采用同軸電纜的,走模擬信號,720x576標清信號以下。
4.1.7 eDP接口:比較新的規范,在筆記本行業將廣泛用于取代LVDS,支持超高分辨率,支持1080P以上
4.2 按鏡頭分類
廣角鏡頭
標準鏡頭
長焦鏡頭
變焦鏡頭
針孔鏡頭
4.3 按成像分
彩色攝像頭
黑白攝像頭
紅外攝像頭
4.4按感光原件分
CCD
CMOS
4.5按焦距是否可調分
定焦攝像頭
變焦攝像頭
4.6 按sensor封裝分
COB: 是指Chip On Board。這種方式是將最原始的芯片(Bare Die,裸片),通過打線(Wire Bond)的方式把芯片上的信號和線路板連接在一起。這種方式需要有專門的DA,WB等一系列機臺配合。
CSP:這種方式是預先把Die通過半導體封裝做成類似BGA的方式。但是由于封裝的尺寸很小,所以叫做Chip Scale Package (芯片尺寸封裝)。
05
攝像頭模組的廠商
攝像頭模組市場上有眾多優秀的廠商,以下是一些代表性的企業:
舜宇光學科技集團有限公司:
中國最大的光學儀器制造商之一,專業從事光學鏡頭、光電產品的研發、制造和銷售。其攝像頭模組產品廣泛應用于手機、相機、汽車等領域。
歐菲光集團股份有限公司:
中國領先的精密光電薄膜元器件制造商,專業從事攝像頭模組的設計、制造和銷售。產品廣泛應用于智能手機、平板電腦、可穿戴設備等領域。
丘鈦科技(深圳)有限公司:
中國領先的攝像頭模組制造商,產品廣泛應用于智能手機、平板電腦、汽車等領域。注重技術創新和產品質量,擁有多項核心專利和技術。
立景創新股份有限公司:
中國領先的智能視覺解決方案提供商,產品廣泛應用于智能手機、平板電腦、可穿戴設備等領域。注重技術創新和產品質量,擁有多項核心專利和技術。
江西同興達精密光電有限公司:
中國領先的攝像頭模組制造商,產品廣泛應用于智能手機、平板電腦、汽車等領域。注重技術創新和產品質量,擁有多項核心專利和技術。
合力泰科技股份有限公司:
中國領先的電子元器件制造商,專業從事多種電子產品的研發、制造和銷售,包括攝像頭模組。產品廣泛應用于智能手機、平板電腦等領域。
聯創電子科技股份有限公司:
中國領先的精密光電元器件制造商,產品廣泛應用于智能手機、平板電腦等領域。注重技術創新和產品質量,擁有多項核心專利和技術。
這些廠商在攝像頭模組領域具有較高的技術實力和市場份額,為物聯網系統提供了高質量的攝像頭模組解決方案。
06
供應商A:深圳市同贏實業有限公司
1、產品能力:
(1)選型手冊
同贏工業攝像頭 選型清單.pdf
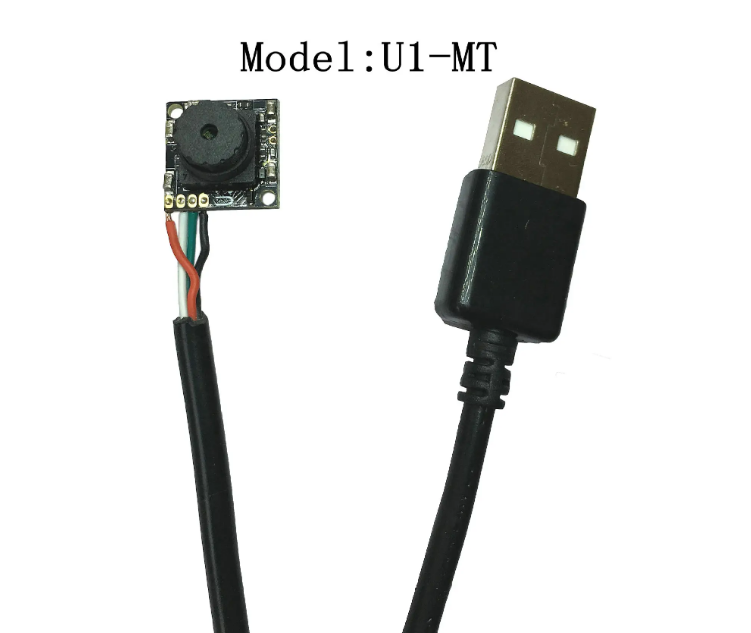
(2)主推型號1:TYAX100-001
對應的產品詳情介紹

品名型號:720P攝像頭模組H62
品牌:TY
對焦方式:定焦/手動調焦
線長:標配1M
分辨率:1280*720P
產品接口:USB 2.0
產品尺寸:38*38mm/32*32mm
產品適用于:廣告機,門禁,人臉識別
支持系統:And(需加uvc),Win,Linux
產品特點:
1:支持來圖來樣定制
2:可配不同廣角鏡頭
3:可定制高中低端方案
(如有侵權,聯系刪除)
本文章源自奇跡物聯開源的物聯網應用知識庫Cellular IoT Wiki,更多技術干貨歡迎關注收藏Wiki:Cellular IoT Wiki 知識庫(https://rckrv97mzx.feishu.cn/wiki/wikcnBvAC9WOkEYG5CLqGwm6PHf)
歡迎同學們走進AmazIOT知識庫的世界!
這里是為物聯網人構建的技術應用百科,以便幫助你更快更簡單的開發物聯網產品。
Cellular IoT Wiki初心:
在我們長期投身于蜂窩物聯網 ODM/OEM 解決方案的實踐過程中,一直被物聯網技術碎片化與產業資源碎片化的問題所困擾。從產品定義、芯片選型,到軟硬件研發和測試,物聯網技術的碎片化以及產業資源的碎片化,始終對團隊的產品開發交付質量和效率形成制約。為了減少因物聯網碎片化而帶來的重復開發工作,我們著手對物聯網開發中高頻應用的技術知識進行沉淀管理,并基于 Bloom OS 搭建了不同平臺的 RTOS 應用生態。后來我們發現,很多物聯網產品開發團隊都面臨著相似的困擾,于是,我們決定向全體物聯網行業開發者開放奇跡物聯內部沉淀的應用技術知識庫 Wiki,期望能為更多物聯網產品開發者減輕一些重復造輪子的負擔。
Cellular IoT Wiki沉淀的技術內容方向如下:
奇跡物聯的業務服務范圍:基于自研的NB-IoT、Cat1、Cat4等物聯網模組,為客戶物聯網ODM/OEM解決方案服務。我們的研發技術中心在石家莊,PCBA生產基地分布在深圳、石家莊、北京三個工廠,滿足不同區域&不同量產規模&不同產品開發階段的生產制造任務。跟傳統PCBA工廠最大的區別是我們只服務物聯網行業客戶。
連接我們,和10000+物聯網開發者一起 降低技術和成本門檻
讓蜂窩物聯網應用更簡單~~
哈哈你終于滑到最重要的模塊了,
千萬不!要!劃!走!忍住沖動!~
歡迎加入飛書“開源技術交流群”,隨時找到我們哦~
點擊鏈接如何加入奇跡物聯技術話題群(https://rckrv97mzx.feishu.cn/docx/Xskpd1cFQo7hu9x5EuicbsjTnTf)可以獲取加入技術話題群攻略
Hey 物聯網從業者,
你是否有了解過奇跡物聯的官方公眾號“eSIM物聯工場”呢?
這里是奇跡物聯的物聯網應用技術開源wiki主陣地,歡迎關注公眾號,不迷路~
及時獲得最新物聯網應用技術沉淀發布
-
物聯網
+關注
關注
2911文章
44803瀏覽量
375011 -
視頻監控
+關注
關注
17文章
1711瀏覽量
65074 -
攝像頭
+關注
關注
60文章
4852瀏覽量
95958
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論