 從無人駕駛行業技術發展和現狀分析未來的趨勢
從無人駕駛行業技術發展和現狀分析未來的趨勢
現在無人駕駛的熱潮,起源于 2005 年,美國國防部舉辦的 DARPA Grand Challenge 。04 年的第一屆沒有選手跑出來,但是 05 年在荒野的比賽,有多支隊伍成功跑完,斯坦福大學和卡耐基梅隆大學獲得了第一、二名。
1. 無人駕駛行業的現狀分析
1.1 The origin: DARPA
現在無人駕駛的熱潮,起源于 2005 年,美國國防部舉辦的 DARPA Grand Challenge 。04 年的第一屆沒有選手跑出來,但是 05 年在荒野的比賽,有多支隊伍成功跑完,斯坦福大學和卡耐基梅隆大學獲得了第一、二名。
而 2007 年的 DARPA Urban Challenge ,把挑戰放到了城市路況中,這次是卡耐基梅隆大學,斯坦福大學和弗吉尼亞理工大學分別獲得了第一,二,三名。
(圖 01 兩屆非常關鍵的 DARPA Challenge,推動了無人駕駛在學術界的研究)
通過美國國防部的比賽,向世人證明了無人駕駛技術上的可能性。
1.2 Google 延續了 DARPA 的技術,從 09 年一直在不斷的研發
Google 看到 DARPA 中無人駕駛技術的未來,于 2009 年將斯坦福 AI Lab 的負責人,也是 DARPA 中斯坦福大學隊原型車的負責人 Sebastian 招到 Google,和他的原班人馬一起,繼續無人駕駛領域的研究。Google X 于 2010 年 1 月正式成立。
(圖02 斯坦福大學 AI Lab的負責人 Sebastian)
(圖03 Google 早年的無人車)
從 09 年到 2016 年 6 月,Google 的無人車累計行駛了 2,777,585 公里。光 2016 年 8 月這一個月,無人車就行駛了 202,777 公里。
截止到現在,Google 的無人車已經累計行駛了 500 萬公里。最新的技術實力,可以達到平均連續 8000 公里 1 次人工干預的水平。
2016 年 12 月,Google 正式將 Google X 中的無人駕駛業務分拆出來,成立了獨立公司 Waymo。
(圖04 無人駕駛從 GoogleX 中獨立出來,成立了子公司 Waymo)
由于 Google 對無人駕駛技術的大力推進,在硅谷大家都能看到最前沿的技術似乎已經能很快的得到普及。目前,Google 的無人駕駛技術還是公認世界最高的水平。
1.3 Tesla 的探索—激進的先驅者
Tesla 從 2014 年底的車型開始,就為用戶提供可選的“輔助駕駛包”。采用的是Mobileye 提供的 ADAS 技術。
隨后,由于技術路線上的差異,Tesla 于2016 年 7 月終止了和 Mobileye 的合作。目前 Tesla 的技術路線主要依靠 8 個環繞攝像頭,1 個毫米波雷達和12個超聲波傳感器。
Tesla 的野心越來越大,宣稱要在 2017 年末實現完全無人駕駛,而 2019 年全面上路。
(圖05 Tesla 的 Autopilot --主要基于攝像頭來做識別)
(圖06 Tesla 當時的合作伙伴,Mobileye 的設備)
(圖07 專業做 ADAS 的企業 Mobileye)
(圖08 Tesla 的多傳感器方案)
僅靠最簡單的 ADAS 系統,在光照好的條件下也可以實現相當高的精度,但是業內普遍認為其安全性不達標。
Tesla 的論據是,目前 Tesla 的車在 “ 輔助駕駛模式 ” 下累計行駛了 13 億英里,而目前的事故概率相當低,至少是人類同等里程下的二分之一。所以目前的自動駕駛系統,已經可以實現強于人類兩倍的性能。
現實中, 2016 年 5 月,Tesla 的一名車主開啟自動駕駛模式,在車上看視頻,直接撞到拖車上身亡。根據事后調查,Tesla 由于有免責聲明,要求車主對駕駛負責,而不能完全交給系統,Tesla 得以被判免責。
(圖9 Tesla 車在自動駕駛模式下的嚴重事故)
(圖10 嚴重事故后損毀的車)
因此,Tesla 一方面宣稱其技術可以實現 Level 4 以上的“完全無人駕駛”,現實中為了免責,則要求用戶僅將其當做輔助駕駛來使用。
雖然 Tesla 的技術路線較為激進,但是因為其廣泛的消費者基數,吸引到了資本市場的強烈關注,可以說掀起了無人駕駛的熱潮。
因為 Google 的車雖然在默默進步,但知道,乘坐過的人較少,而 Tesla 的車,有廣大的車主基數。車主通過直觀感受,覺得光是 ADAS 系統就離人們想象中的無人駕駛不遠了。畢竟 99% 的安全,和 99.9% 的安全,在消費者看來其差異并不明顯。
(圖11 Tesla 的銷售店,有奢侈品的感覺)
另一方面,Tesla 極其擅長制造話題,也起到了推波助瀾的作用。
(圖12 Tesla 相關的新聞不斷)
1.4 Uber 和 Apple 的探索
2015 年 Uber CEO 正式宣布要用無人駕駛技術來提供服務,招了一些卡耐基梅隆的研究員,使用 LiDAR + 攝像頭的多傳感器融合技術。
2016 年 8 月,Uber 收購了做無人駕駛的公司 Otto。同年 9 月,Uber 正式在匹茲堡提供基于無人駕駛系統的出租車服務。同年 12 月,在舊金山提供同樣的服務。
截止至今,Uber 的技術還略遜一籌,實際效果沒有達到 Uber 的預期。目前 Uber 的車隊有 43 輛車,無人駕駛模式下每周行駛 20,000 英里,平均連續 0.8 英里一次人工干預。
(圖13 Uber 的無人駕駛租車)
(圖14 Uber 的無人駕駛技術受到了較大的質疑)
Apple 于 2014 年末開始正式啟動內部名為“ Project Titan ”的野心勃勃的造車計劃—完全無人駕駛的電動車。據內部人士透露,Apple 是和一家機器人公司合作開發的技術原型車,采用最新的多傳感器融合技術。該機器人公司是 Virginia Tech spin off 出來的公司,也曾經是 Virginia Tech 參加 DARPA Challenge 的團隊和合作伙伴。
起初 Apple 是希望造一臺類比 Tesla 的電動車,但 16 年戰略發生了變化,Apple 希望打造一臺“完全無人駕駛”的電動車。這輛車上不會有方向盤,預計最早 2020 年投入市場。
而 2017 年 6 月,Apple CEO 對公眾承認了蘋果對無人駕駛領域的興趣,但是否認了造車,而是說在研究無人駕駛技術的軟件。
(圖15 Apple 的 Titan 計劃)
1.5 無人駕駛技術指標對比—距離實現 Level 4 還有多遠?
盡管指標的選擇有所差異,按照加州的規定,申請了無人駕駛牌照的公司需要報備各自的無人駕駛運行情況。其中最核心的指標,是累計無人駕駛下的里程數,和平均連續無人工干預里程數。
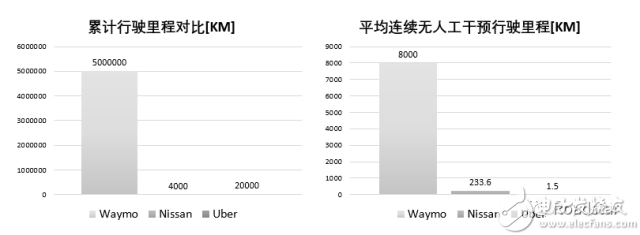
(圖16 Waymo,車廠代表的 Nissan 和 Uber 的指標對比)
從結論來看,Google 的技術依然瑤瑤領先其他可比公司,累計行駛了 500 萬公里,而最新的技術可以達到平均連續 8000 公里 1 次人工干預。作為主機廠中比較先進的Nissan,大概是平均 230 公里 1 次人工干預。而 Uber 的水平,大概還停留在平均1.5 公里 1 次人工干預,可以看到大家的差距還較大。
國內的百度,據消息稱,目前水平和 Uber 相當。
根據業內普遍的看法,如果無人駕駛車輛的安全性能夠達到人類的 10 倍以上,就可以完全替代人。那么也許完全實現無人駕駛需要的技術目標,大約在連續 10 萬公里1 次人工干預的水平。
恰恰因為 Google 的水平已經非常高,讓資本市場看到了短期內(3-5年)實現足夠安全性的可能,目前各家企業都在拼命沖刺技術的最后五公里。
1.6 蓬勃涌現的無人駕駛初創企業—向勝利發起沖鋒的號角
從 2015 年開始,不斷出現做無人駕駛的初創企業。這里我們摘取了一些典型的,做接近于 Level 4 (無人駕駛和輔助駕駛的定義見后續分析)技術的企業,供大家分析。

(圖17 根據網上信息收集整理的主要 Level 4 無人駕駛 startup )
可以看出,2015 年和 2016 年,有很多從大公司,大學出來的初創公司開始進入該領域。無人駕駛系統的開發,呈現出百花齊放的狀態。無人駕駛技術的黃埔軍校,有斯坦福大學,Google,和國內的百度。
按照上述的分析,這些研究無人駕駛 Level 4 技術的企業,都在努力試圖用各自的技術方案,實現安全性達標,成本可控的“無人駕駛最后五公里”。
究竟誰能夠摘取最終的桂冠呢?我們認為類比汽車行業的引擎,電池管理技術等核心模塊,無人駕駛技術應該也不會呈現出一家獨大的情況。最終應該有大公司,也有一些初創公司可以做出性能和成本達標的產品。
1.7 無人駕駛還是輔助駕駛
根據 SAE 的分類,無人駕駛從 Level 0 到 Level 5 。更加詳細的分類標準在網上已經有很多,我們就不做詳細的科普。這里做一下簡單的定義,并且給大家舉例說明一下。

(圖18 無人駕駛的分類簡述)
根據定義,Level 2 到 Level 3 應該劃分為“輔助駕駛”的范疇。之所以稱之為輔助駕駛,是因為這個等級下,駕駛員要承擔駕駛的完全責任,無人駕駛系統不承擔一切事故的后果。
目前 Level 2 的 ADAS 系統的成本價降到 1,000 人民幣以內,前裝的售價也在數千人民幣以內,可以算是得到了較好商業化的汽車智能化配件。海外有著名的 Mobileye,國內也有很多做 ADAS 系統的對標企業正在努力趕超。
Level 2 的技術雖然可以實現全面的駕駛輔助,但是由于對安全性的要求較低,效果很多時候是根據駕駛員的主觀感受而決定的,可以說技術門檻也相對較低。目前很多主機廠,都在研發自己的 ADAS 系統,對 Mobileye 進行替換。
Level 3,是在 Level 2 的基礎上,增加了更多的傳感器,提高安全系數后,能夠在部分路況下完全接管汽車的控制的系統。比如說一輛車從市區開到高速公路,在高速公路上可以實現無人駕駛下的定速巡航(Tesla 已經提供這項功能)。但是其問題是,由于適應的路況較為少,而且系統還是要求在發出請求后人類駕駛員必須在六秒鐘之內接管,無法實現真正的人類替代。
對于國內目前涌現出來,做低速無人車如機場擺渡車,園區高爾夫車等等的企業,由于行駛速度非常低(10 km/h),安全性的要求也會低很多。一般而言,我們將其技術歸類到 Level 2 到 Level 3 。
而 Level 2,Level 3,雖然有著較為可見的應用,他們所需要的技術和 Level 4 以上還是涇渭分明的。也許和很多人想象得不同,并不能實現從 Level 2 向 Level 4 的逐漸升級。Level 4 的主要技術,是要實現在市區環境下的完全無人駕駛—這需要系統具備極高的安全性。而 Level 4 的最大特征,在于給定事先定好的區域,就可以實現“完全無人駕駛”。這樣的話,商業上可以實現對人類駕駛員的替代,可以改變傳統的生產關系。而 Level 2,Level 3 的技術,最終還是“幫助”人類駕駛員把車開得更好而已。
正因為 Level 4 有著巨大的技術挑戰和相應的更廣闊的市場空間,目前 Level 4 無人駕駛技術是市場關注的焦點。
2. 無人駕駛行業的現狀分析
2.1 車載傳感器一覽
無人車使用的傳感器,大的來說有以下這些類別:激光雷達,攝像頭,GPS (包括差分 GPS),IMU (慣性制導),毫米波雷達,超聲波雷達等等。
雖然人類可以只通過視覺和聽覺就實現駕駛,但是機器人缺乏能夠有效識別場景的大腦,需要通過更強的“五感”,來彌補這個缺陷。傳感器,可以說是無人駕駛汽車的眼睛和耳朵。

(圖19 車載傳感器的案例)
2.2 主要傳感器之 LiDAR
而現在不同傳感器類別中,源自于 DARPA 的激光雷達( LiDAR ),被認為是無人駕駛最重要也是最必不可缺少的傳感器。相比起其他傳感器,他最大的優勢在于對于空間的測量非常精確,可以保證相對高的安全系數。

(圖20 傳感器的優劣勢對比)
(圖21 Velodyne 的 64 線,32 線和 16 線 LiDAR )
(圖22 LiDAR 眼中的世界)
目前全球的 LiDAR 供應幾乎被 Velodyne 壟斷。價格昂貴,最便宜的 16 線 7,900 美金,最貴的 64 線 80,000 美金一臺。
機械式激光雷達通過高速旋轉,能夠通過點云形成對周邊空間環境的準確感知,各家無人駕駛廠商需要開發自己的點云特征識別技術。
2.3 LiDAR 開發的激烈競爭
目前全球范圍內,技術比較成熟的廠商還只有源自 DARPA 的 Velodyne 一家。但是也有數不盡的初創公司誕生,試圖挑戰 Velodyne 的壟斷地位。
而 LiDAR 本身,也有一個最新的技術方向,就是摒棄 Velodyne 的機械旋轉設計,用相控陣技術實現固態的激光雷達。固態的激光雷達雖然最高線數只能到達 16 線。但是更易量產,成本也可以做得更低。被普遍認為是激光雷達的究極解決方案。最終的成本,可以降到 100 美金一個,和攝像頭相仿。
(圖24 Quanergy 開發中的固態 LiDAR )
(圖25 Lumina 開發中的固態 LiDAR 的效果圖)

(圖26 Quanergy 規劃中的固態產品和價格)
2.4 只采用攝像頭是否靠譜— Deep Learning 的能力邊界在哪里
今年由于 DNN(Deep Neural Network),也就是深度學習技術的進步,有很多基于此的新算法誕生。很多學者說僅僅依靠 DNN 技術,就可以實現類似人類的駕駛—只依靠攝像頭的視覺信息,實現 Level 4 級別的無人駕駛。
其代表,就是來自于 Princeton 大學 AI 領域的教授肖建雄創立的 Auto X,和來自于斯坦福大學 AI Lab,著名 AI 三駕馬車吳恩達太太創立的 Drive.ai。
然而,也許是發現只依靠視覺信息和 DNN 無法實現 Level 4 要求的安全性,加上攝像頭單一傳感器的局限性,這兩家企業目前都已經改變了當初宣稱的做法。
AutoX 說他們是“Camera First ”,未來 LiDAR 降價后會加上 LiDAR。而 Drive.ai說他們在使用 DNN 算法來識別 LiDAR 產生的點云—而不是僅僅用在攝像頭上。
從我們的角度看來,因為 LiDAR 降價是個必然到來的事情,因為價格高昂而不用LiDAR,降低系統整體的安全性與可靠性,可能得不償失。
(圖27 AutoX 的車,有多個攝像頭 )
(圖28 AutoX 的車載攝像頭陣列 )
(圖29 Drive.ai 的車,可以看到六個 16 線 LiDAR 組成的陣列)
(圖30 Drive.ai 的 LiDAR 下的識別圖像,DNN 適用的對象也延伸到了點云數據)
2.5 Level 4 無人駕駛的新技術體系—多傳感器融合和 DNN 算法
Google 開始做無人車是在 2009 年,基于斯坦福參加 DARPA 比賽時候的原型車。由于 2009 年攝像頭的算法效果并不好,導致 Google 在今后的開發上,非常依賴LiDAR。不斷對 LiDAR 算法遇到的 corner case(例外)進行算法層面的補充,也就是打補丁。而且,為了提高安全性,Google 甚至自己制造了世界上唯一的 128 線LiDAR。也就是說,Google 的技術體系中,高線數 LiDAR 是必不可缺的主傳感器。
而近年來,主要有以下三個新的動向。
A. 多顆低線數 LiDAR 對高線數 LiDAR 的模擬和替換
由于高線數 LiDAR 的生產工藝要求極高,Velodyne 和谷歌的產量有限,而且成本非常高,導致使用 LiDAR 的技術方案普及遇到很大的苦難。近年來,有很多初創公司發現通過組合好多顆 16 線的 LiDAR,也能達到不遜于單顆高線數 LiDAR 的效果。

(圖31 多顆 LiDAR 陣列對 64 線 LiDAR 的替代案例)
B. 多傳感器,尤其是 LiDAR 和攝像頭的算法融合
由于近年計算機視覺和深度學習算法的發展,攝像頭的圖像識別能力相比 2010 年前后有了質的飛躍。在傳統使用 LiDAR 為主傳感器的 Level 4 無人駕駛,和采用更便宜的攝像頭為主傳感器的 Level 2 ADAS 方案的基礎上,有了將 LiDAR 和攝像頭數據進行融合的新嘗試。通過 LiDAR 和攝像頭這兩種傳感器的優勢互補,可以用更加低性能的傳感器,實現更高的安全性。

(圖32 攝像頭和 LiDAR 數據的深度融合示意圖)
C. 對于 LiDAR 點云數據,采用 DNN 算法
Google 的時代,DNN 還沒有得到廣泛的應用。所以 Google 對于點云的識別,采取的還是類似于 Computer Vision 的算法—提取特征。但是由于最近 DNN 的效果逐漸得到證明,也有一些新的嘗試,用 DNN 來做點云數據的學習,并且識別物體。這個效果雖然還有待驗證,但是我們相信最終這個方法在數據量大了以后會超越傳統的特征識別算法。

(圖33 DNN 在 LiDAR 數據中的應用例)
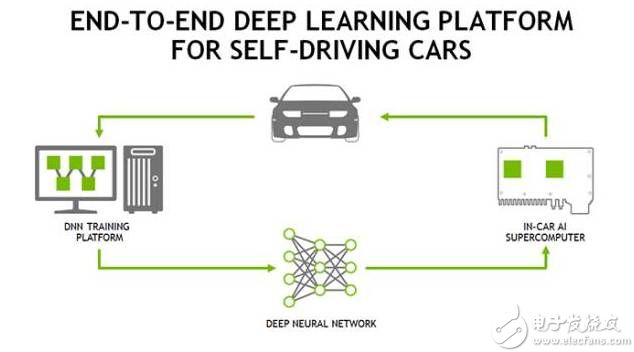
(圖34 Nvidia 的 DNN 方案)
2.6 無人駕駛是泡沫嗎?
對于無人駕駛普及而言,最關鍵的因素是性能和價格。
從價格的角度,業內普遍認為最貴的激光雷達,會在今后五年內價格降低到不礙事的程度。
現在問題的關鍵因素在于,無人駕駛是否能符合大家的預期,在可預見的短期內達到技術的成熟。
近年,谷歌的技術已經達到了 8,000 公里一次人工干預的水平。這個水平對于很多人而言,已經非常接近于實現了 Level 4 。而 Tesla,更是激進的認為僅靠攝像頭和超聲波雷達,毫米波雷達的方案,就已經能夠實現兩倍于人的駕駛能力。讓我們保守一點,假設連續 100,000 公里一次人工干預是 Level 4 無人駕駛的基礎要求。
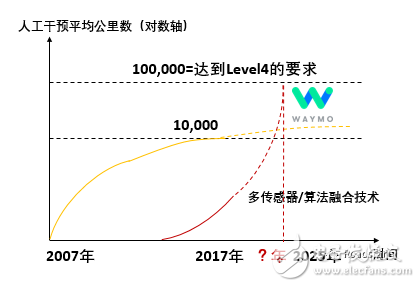
(圖35 技術的發展預測圖,黃線是 Google 的方案,紅線代表新的技術體系)
根據剛才所述,采用新的技術架構下,我們認為 Level 4 無人駕駛技術,有希望在 2025 年之前的某個時間,達到足夠好的安全性。而無人駕駛是否破滅,則要取決于圖中虛線所代表的未來的技術進展。
另外,根據 Gartner 著名的 Hype Cycle 來看,無人駕駛已經處于泡沫期的最后階段。而他們的預測中,無人駕駛的普及需要遠大于 10 年的時間。Gartner 對于無人駕駛技術還是抱著相對保守的態度。
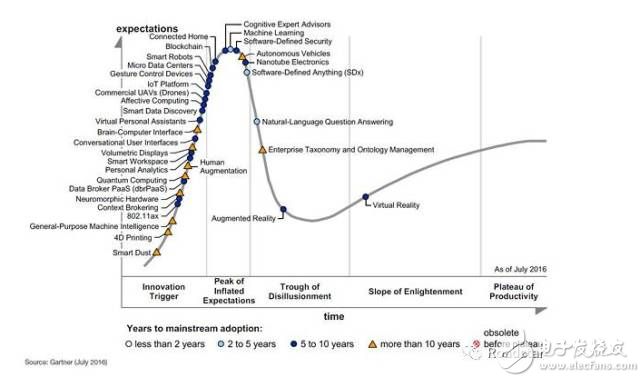
(圖36 Gartner 著名的 Hype Cycle 圖)
最終無人駕駛是否會是一個泡沫,有待于接下來三年內技術的進步來揭開這個謎題。我們團隊對無人駕駛技術的未來,充滿信心。
3. 中國市場的獨特性
3.1 中國道路的技術挑戰
目前世界的無人駕駛路測,主要是在硅谷地區。而中國的道路交通情況,相比起硅谷,或者其他發達國家,路況更加復雜。目前主流的無人駕駛算法,都需要解決 corner case 的問題,無論是通過不斷更迭算法打補丁的方式,還是通過 DNN,收集數據來解決,都需要實際上接觸大量的 corner case,才能夠實現。
因此,把硅谷的算法平移到中國,是一定會失敗的。比如 Google 在舊金山灣區跑得很完美的無人車,開到德州就問題百出了,更不要說來中國了。

(圖37 中美路況的對比)
因此,中國市場急需要針對中國的路況而開發的系統,不在中國進行大規模的路測收集數據,就無法實現在中國本土的 Level 4 無人駕駛落地。
3.2 中國的無人駕駛發展現狀
根據工信部推出的《中國制造 2025 》的規劃,中國 2020 年,2025 年關于無人駕駛的目標如下:
在《中國制造 2025 》重點領域技術路線圖中,智能網聯汽車分為 DA、PA、HA、FA 四個級別,其中, PA 指部分自動駕駛,HA 指高度自動駕駛, FA 指完全自主駕駛,駕駛權完全移交給車輛。
2020 年,汽車信息化產品自主份額達 50%,DA、PA 整車自主份額超過 40%,掌握傳感器、控制器關鍵技術,供應能力滿足自主規模需求,產品質量達到國際先進水平。啟動智慧交通城市建設,自主設施占有率 80% 以上。
2025 年,汽車信息化產品自主份額達 60%,DA、PA、HA 整車自主份額達 50% 以上;自主智能卡車開始大規模出口。制定中國版完全自主駕駛標準,基于多源信息融合、多網融合,利用人工智能、深度挖掘及自動控制技術,配合智能環境和輔助設施實現自主駕駛,可改變出行模式、消除擁堵、提高道路利用率,綜合能耗降低 10%,減少排放 20%,減少交通事故數 80%,基本消除交通死亡;FA 智能化裝備率 10%,自主系統裝備率 40%。
另一方面,國內也有很多企業,高校,開始自主研發 Level 4 無人駕駛系統。典型的比如百度,Volvo,國防科大和上汽等。很多都已經實現了較長距離的高速公路實驗,以及封閉區域內的實驗。
(圖38 中國部分企業,高校,研究所的無人駕駛車路測)
-
無人駕駛
+關注
關注
98文章
4077瀏覽量
120646
發布評論請先 登錄
相關推薦
低速無人駕駛清掃機器人無線充電解決方案
未來的ar技術發展趨勢
UWB模塊如何助力無人駕駛技術
無線充電技術為低速無人駕駛清掃車注入無限動力
淺談自動駕駛技術的現狀及發展趨勢
特斯拉推出無人駕駛Model Y
周鴻祎預測:新能源車未來趨勢直指無人駕駛網約車市場
5G賦能車聯網,無人駕駛引領未來出行

圖達通助力易控智駕無人駕駛技術,賦能智慧礦山建設

32.768K晶振X1A000141000300適用于無人駕駛汽車電子設備
5G車載路由器引領無人駕駛車聯網應用






 工商網監
工商網監
評論