 從藍牙協議棧視角探索信道探測
從藍牙協議棧視角探索信道探測
親愛的藍牙科技愛好者們,上期的“干貨”希望大家看得過癮!在本期節目中,主講人藍牙技術聯盟技術與市場工程師魯公羽會繼續為您詳解信道探測(Channel Sounding),從藍牙協議棧的視角探索信道探測的技術細節!
節目已發布!不要錯過本期精彩內容!
藍牙技術專家帶您從藍牙協議棧視角探索信道探測!
本期亮點
信道探測技術細節
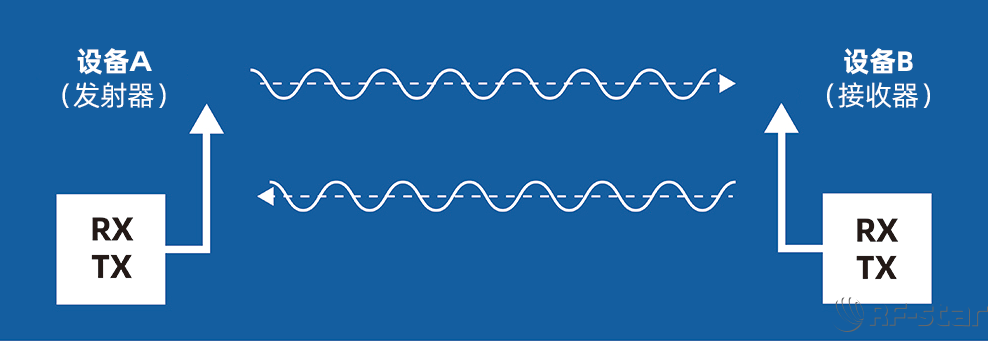
信道探測(Channel Sounding)是基于一對一已連接藍牙設備間的測距方式,雙方都需要支持信道探測的藍牙特性。信道探測的發起者和反射者可任意選擇,和藍牙設備連接的主從模式沒有相關性。
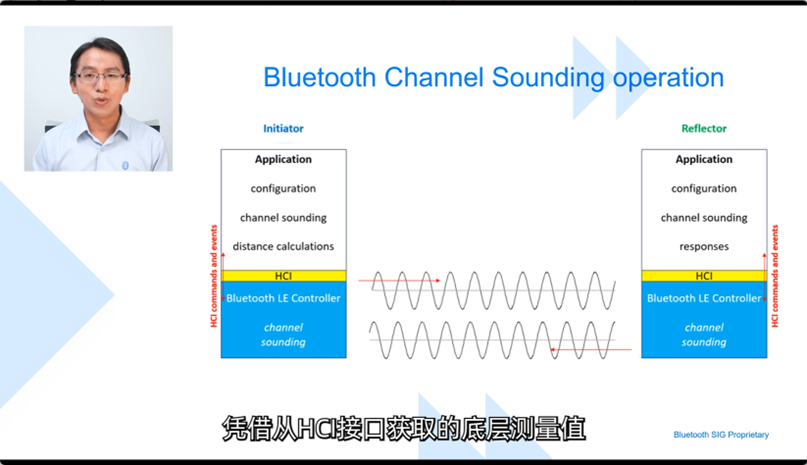
信道探測的核心功能主要集中于藍牙controller部分。而host部分的應用層,憑借從HCI接口獲取的底層測量值,通過算法優化并輸出最終的測量結果。
信道探測工作流程
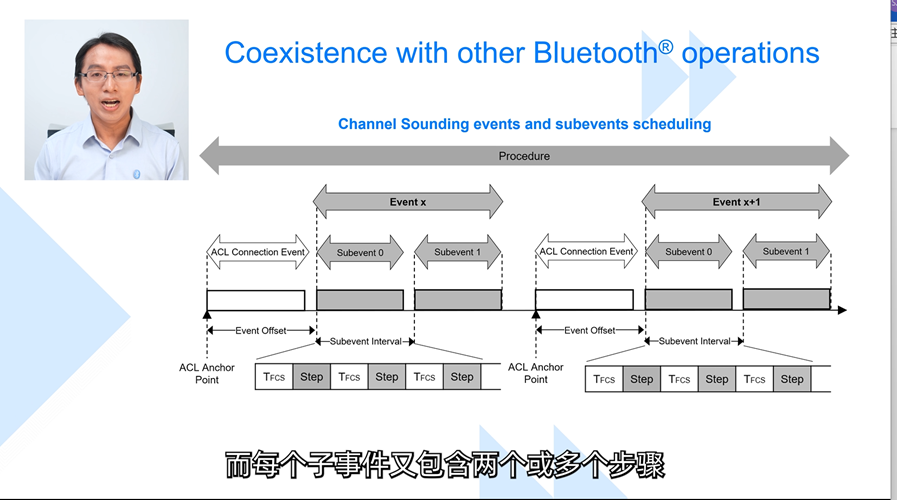
Channel Sounding測量,由流程(Procedure)、事件(Event)、子事件(Subevent)和步驟(Step)組成。ACL連接將繼續充當信道探測鏈路層數據包交換的渠道,并為其調度提供時間參考。
信道探測事件總與ACL連接事件錨點相錯開,且可包含一個或多個信道探測子事件。而每個子事件又包含兩個或多個步驟。每個步驟又都會進行雙向數據交換,由發起設備首先發送數據,反射設備隨后進行一次或多次數據發送。
1道探測步驟里包含四種模式
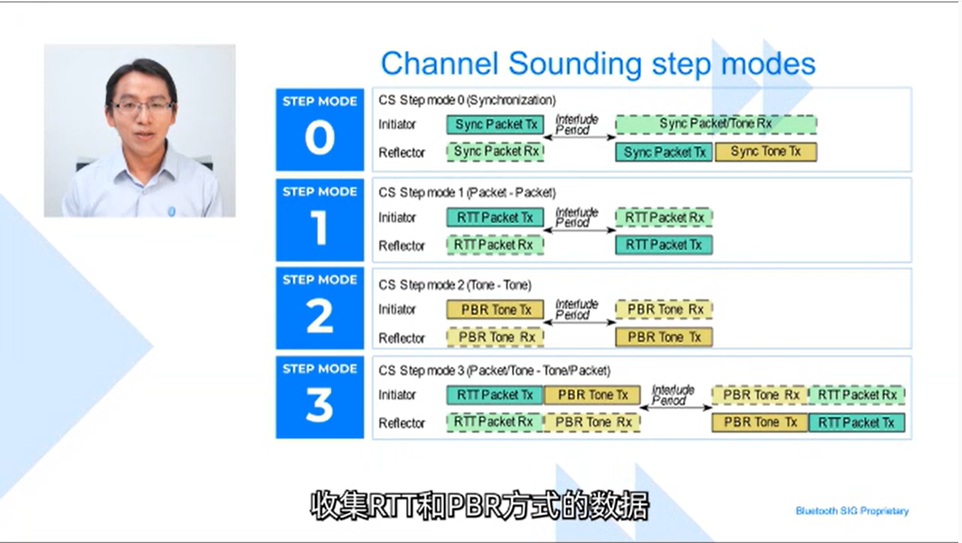
模式-0在頻率和時間校準中應用, 采用CS SYNC數據包。
模式-1在往返時間(RTT)方法中應用, 采用CS SYNC數據包。
模式-2在相位測距(PBR)方法中應用,采用CS Tone數據包。
模式-3允許在單個步驟中收集RTT和PBR方式的數據。支持模式-3是可選的。
2信道探測初始化階段
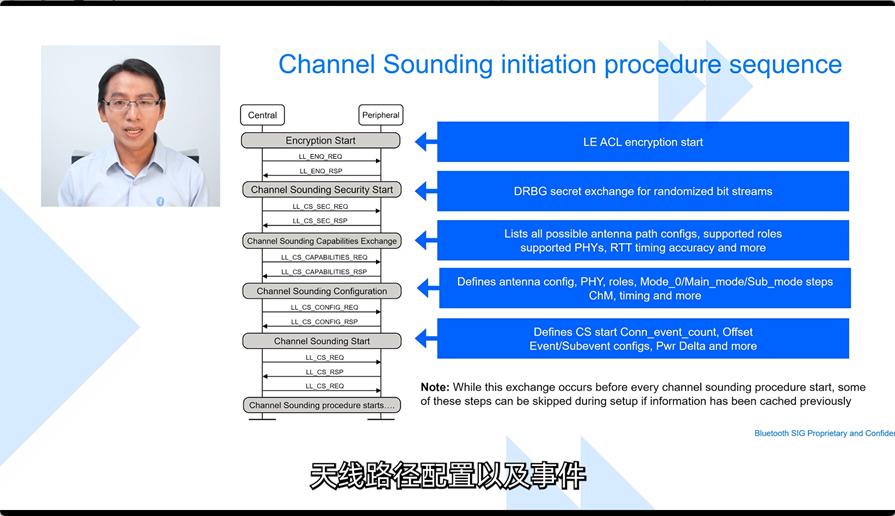
建立加密的ACL連接,用于之后的鏈路層數據交互。
兩個設備各自生成初始化向量(CS_IV),實例化隨機數(CS_IN)和個性化向量(CS_PV),通過交互,兩個設備各自都擁有對方生成的數據,這將用于構建DRBG(確定性隨機比特生成器)。DRBG的相關參數僅這兩個建立連接的設備知曉。DRBG為Channel Sounding的測距安全性提供了保障,它用于決定信道跳頻、步驟模式的使用、恒音調制、多天線路徑時的傳輸次序、存取地址及RTT數據包的有效載荷內容等。
兩個設備交互各自所支持的配置選項。如支持的天線路徑,物理層,RTT時間精度,測量角色等。
由發起設備來確定測量時會選擇的參數信息,并請求反射設備同意。這些參數除了包含上一步里列舉的部分內容,還包括跳頻所對應的Channel Map,算法選擇,以及信道探測步驟里用到的模式0/主模式/子模式的構成等相關信息。
確認信道探測測量流程開始的時間偏移點,天線路徑配置以及事件、子事件具體的數目和時序等信息。
-
數據包
+關注
關注
0文章
261瀏覽量
24392 -
藍牙協議
+關注
關注
1文章
29瀏覽量
11408 -
藍牙技術聯盟
+關注
關注
8文章
39瀏覽量
23877
原文標題:《藍牙創新說2024》第五期:精彩繼續!藍牙技術專家帶您從藍牙協議棧視角繼續探索信道探測!
文章出處:【微信號:藍牙技術聯盟,微信公眾號:藍牙技術聯盟】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
由淺入深,藍牙4.0/BLE協議棧開發攻略大全(5)
由淺入深,藍牙4.0/BLE協議棧開發攻略大全(3)
由淺入深,藍牙4.0/BLE協議棧開發攻略大全(4)
藍牙協議棧實現模式分析

為什么藍牙信道探測將引領高精度定位服務?
恩智浦受邀出席藍牙信道探測技術與應用論壇






 工商網監
工商網監
評論