") 為自動駕駛發(fā)展鋪路ADAS SoC須兼顧性能/安全
為自動駕駛發(fā)展鋪路ADAS SoC須兼顧性能/安全
從Karl Benz發(fā)明汽車到福特(Ford)率先投入量產,汽車的發(fā)展之路由來已久,輔助駕駛的各種裝置也在此后逐漸成長;上個世紀末期的80年代,更誕生了第一個導入半導體的輔助裝置:以GPS為基礎的汽車導航系統。
時至今日,幾乎每一臺車都配備了防鎖死煞車系統(Anti-Blocking System,ABS)和電子車身穩(wěn)定系統(Electronic Stability Program, ESP),透過高品質電機裝置的使用,來提供駕駛和汽車的乘客更佳的安全性。畢竟,從60年代開始的自動駕駛汽車理想也正逐步實現,只是時間的問題而已(圖1)。
圖1 1950年代的人們對自駕車的想像
圖片來源:維基百科
除了油電混合電動車和電動車之外,先進駕駛輔助系統(ADAS)和自駕車亦是瑞薩在自動化市場的重點。ADAS和自駕車應用需要系統單晶片(SoC)高階的運算能力,來分析車子的周遭環(huán)境和認知運算(Cognitive Computing),并透過其高效能的控制功能,讓駕駛汽車既安全又舒適。然而,被汽車制造業(yè)者和消費者公認為終極目標的自動駕駛完全實現之前,ADAS將以相當的規(guī)模大幅成長(圖2)。
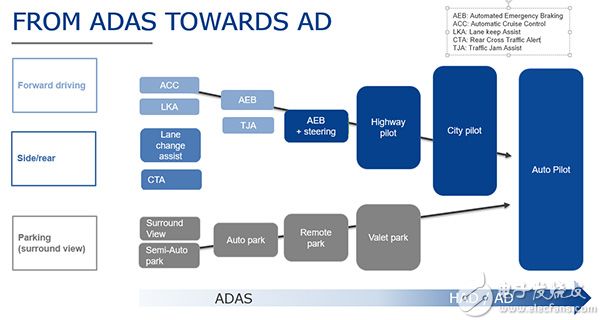
圖2 ADAS的最終目標是實現自駕車
借ADAS提升駕駛體驗三大區(qū)塊/功能安全不可少
ADAS的首要目標是為駕駛員提供安全方面的幫助,對于其他移動和行人交通參與者來說也是如此。此外,ADAS應該要增強駕駛人的駕駛舒適度,而且要能夠改善經濟和環(huán)境之間的平衡。
一個典型的ADAS是由三個主要建構區(qū)塊組成(圖3),包含:感測/分析區(qū)塊(Sensing and Analyzing)、融合/決策區(qū)塊(Deciding)、控制區(qū)塊或稱致動器區(qū)塊(Controlling)。感測/分析元件、融合/決策元件是車子的「眼睛和頭腦」,它們具備駕駛輔助功能或者可進行自動駕駛。這個系統能夠偵測、辨識和接收來自車輛周圍的資訊,將這些數據結合之后,再根據交通狀況進行決策。控制部分根據作出的決定執(zhí)行命令,而得以舒適且安全地駕駛汽車。
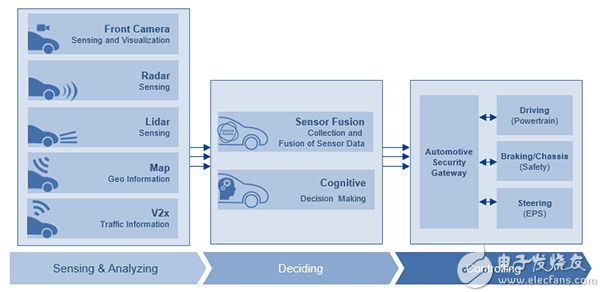
圖3 ADAS運行架構示意圖示意
由于這些元件最終對ADAS和自動駕駛都極為重要,瑞薩電子已經推出具自主性、開放性、創(chuàng)新性且可信賴的Renesas autonomy平臺,可供輔助駕駛和自動駕駛所用。
瑞薩ADAS解決方案所具備的自主性,能夠提供各種選擇方案,讓客戶選擇最適合其所需的核心元件。從具彈性且可編程核心到高度最佳化硬體加速器,瑞薩提供的選擇,能夠在最低的功耗下,提供最高的效能。除了高效能之外,功能性安全(Functional Safety)也是實現ADAS以至自動駕駛的關鍵。
汽車產業(yè)目前正廣泛地使用ISO26262的安全標準,讓具關鍵性的安全功能達到安全性的目標。微處理器提供對ASIL-D的支援,例如支援ASIL-D的RH850-P1H系列,正逐漸成為標準。然而,在復雜且具高效能的SoC上滿足安全要求是新的課題,隨著人們對自動化汽車日益增長的需求,此一議題的處理就變得相當必要。
由于SoC架構的復雜性,要在額外增加最少的系統成本之下來實現功能安全,就需要對底層安全機制的整合,有相當詳細的Know-How和經驗。在自動駕駛模式的關鍵安全方面,針對安全要求的詳細分析和目標應用案例必須一并列入考慮。這是評估安全方面的相關性與大規(guī)模生產成本效益的唯一方式。
瑞薩自2008年起,已經在其P系列的微處理器上首次實現安全性功能,并已遵循包含了整合性安全概念的ISO 26262認證。同樣的情形也適用于其R-Car系列SoC,它們也包含了一個具安全性的作業(yè)系統。
協助辨別號志、路況前置攝影頭具發(fā)展?jié)摿?/h2>
在ADAS和自動駕駛的環(huán)境下,汽車的前置攝影鏡頭是一個獨特的感測器。它和雷達、光達或超音波等感測技術最大的不同是在于,前置攝影鏡頭能夠辨識路標,交通標志和紅綠燈(圖4)。除此之外,它也能夠偵測物體。例如,透過提供數據以便于辨識汽車或行人,偵測他們的移動路徑并測量距離等。藉由這樣的方式,前置攝影鏡頭就是感測器,能夠在良好的視線條件下啟動自動緊急剎車或者提供自動駕駛車輛所需的資訊。
圖4 前置鏡頭在ADAS上的應用范例
因此,前置攝影鏡頭對于要遵守NCAP要求的汽車制造業(yè)者而言,扮演著相當重要的角色。這個要求可以減少車主和其他用路人之間發(fā)生的意外。可以預期的是,在未來的車輛上會大量配備前置攝影鏡頭。這就需要能夠以最低的成本,來提供前置攝影鏡頭給汽車業(yè)者才行。
前置攝影鏡頭的挑戰(zhàn)是如何在低功耗的前提下滿足對高效能電腦視覺和高水準功能性安全的需求。這是一個嚴格的要求,因為小型的前置攝影鏡頭機身,包含感測器本身和SoC,而攝影鏡頭是被放在擋風玻璃旁邊,在這個位置上,前置攝影鏡頭暴露在直射的陽光下,這樣會增加前置攝影鏡頭頂部所產生的溫度。因此,前置攝影鏡頭上零件的功耗必須維持在最小的狀態(tài)。
來自瑞薩自主平臺的V3M是針對NCAP前置鏡頭所設計的,其架構如圖5所示,能為電腦視覺帶來高效能、低功耗和高度的功能安全性。利用不同的加速器,V3M實現具頂級效能的電腦視覺異質平臺:由DMA所提供的一個多功能管線引擎(IMP)和一個電腦視覺引擎(CVE),用以控制記憶體傳輸,讓R-Car V3M更適用于演算法如光流、物體偵測和分類,深度神經網路和卷積神經網路等。
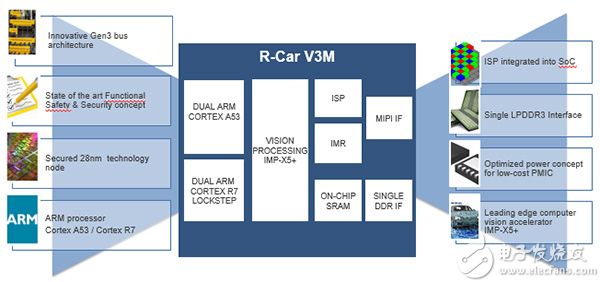
圖5 R-Car V3M架構
V3M配備一個整合型影像信號處理器(Image Signal Processor, ISP),可以增強來自照相機感測器的原始圖像的品質,使其可以為機器視覺識別做好準備。這樣的整合省卻了在前置鏡頭或在感測器本身額外增加一個ISP元件的需求。此系統擁有一個單一的DDR3L記憶體通道。
另外,V3M尚整合一個雙Cortex A53供應用軟體所使用和一個Cortex R7 Lockstep核心來執(zhí)行Autosar(圖6)。當使用案例包含Cortex R7 Lockstep核心和額外的安全特性時,其應用領域是專門用來符合ASIL B的安全性評等,以達到ASIL-C的安全性等級。這個合理的架構減少了對外部元件的需要,并將物料表內容維持在最少的狀況,同時也提供高性能并隨時確保安全性。
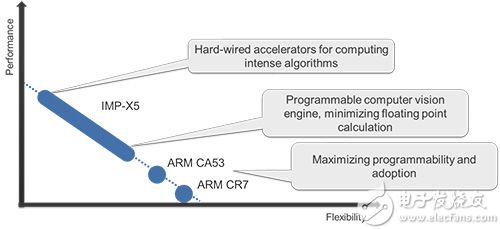
圖6 V3M所用元件之性能、彈性關系示意圖
(本文作者為歐洲瑞薩電子汽車ADAS及安全解決方案事業(yè)處全球ADAS中心經理)
-
adas
+關注
關注
309文章
2189瀏覽量
208746 -
自動駕駛
+關注
關注
784文章
13896瀏覽量
166694
發(fā)布評論請先 登錄
相關推薦
NVIDIA DRIVE技術推動自動駕駛發(fā)展
ADAS高級駕駛輔助系統


自動駕駛汽車安全嗎?











 工商網監(jiān)
工商網監(jiān)
評論