 HOG特征以及提取算法的實現過程
HOG特征以及提取算法的實現過程
1、HOG特征:
方向梯度直方圖(Histogram of Oriented Gradient, HOG)特征是一種在計算機視覺和圖像處理中用來進行物體檢測的特征描述子。它通過計算和統計圖像局部區域的梯度方向直方圖來構成特征。Hog特征結合SVM分類器已經被廣泛應用于圖像識別中,尤其在行人檢測中獲得了極大的成功。需要提醒的是,HOG+SVM進行行人檢測的方法是法國研究人員Dalal在2005的CVPR上提出的,而如今雖然有很多行人檢測算法不斷提出,但基本都是以HOG+SVM的思路為主。
(1)主要思想:
在一副圖像中,局部目標的表象和形狀(appearance and shape)能夠被梯度或邊緣的方向密度分布很好地描述。(本質:梯度的統計信息,而梯度主要存在于邊緣的地方)。
(2)具體的實現方法是:
首先將圖像分成小的連通區域,我們把它叫細胞單元。然后采集細胞單元中各像素點的梯度的或邊緣的方向直方圖。最后把這些直方圖組合起來就可以構成特征描述器。
(3)提高性能:
把這些局部直方圖在圖像的更大的范圍內(我們把它叫區間或block)進行對比度歸一化(contrast-normalized),所采用的方法是:先計算各直方圖在這個區間(block)中的密度,然后根據這個密度對區間中的各個細胞單元做歸一化。通過這個歸一化后,能對光照變化和陰影獲得更好的效果。
(4)優點:
與其他的特征描述方法相比,HOG有很多優點。首先,由于HOG是在圖像的局部方格單元上操作,所以它對圖像幾何的和光學的形變都能保持很好的不變性,這兩種形變只會出現在更大的空間領域上。其次,在粗的空域抽樣、精細的方向抽樣以及較強的局部光學歸一化等條件下,只要行人大體上能夠保持直立的姿勢,可以容許行人有一些細微的肢體動作,這些細微的動作可以被忽略而不影響檢測效果。因此HOG特征是特別適合于做圖像中的人體檢測的。
2、HOG特征提取算法的實現過程:
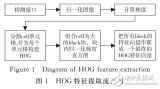
大概過程:
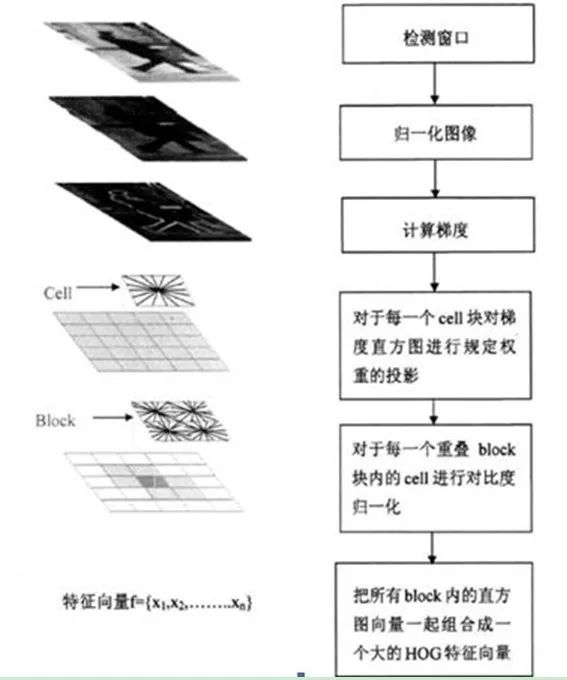
HOG特征提取方法就是將一個image(你要檢測的目標或者掃描窗口):
1)灰度化(將圖像看做一個x,y,z(灰度)的三維圖像);
2)采用Gamma校正法對輸入圖像進行顏色空間的標準化(歸一化);目的是調節圖像的對比度,降低圖像局部的陰影和光照變化所造成的影響,同時可以抑制噪音的干擾;
3)計算圖像每個像素的梯度(包括大小和方向);主要是為了捕獲輪廓信息,同時進一步弱化光照的干擾。
4)將圖像劃分成小cells(例如6*6像素/cell);
5)統計每個cell的梯度直方圖(不同梯度的個數),即可形成每個cell的descriptor;
6)將每幾個cell組成一個block(例如3*3個cell/block),一個block內所有cell的特征descriptor串聯起來便得到該block的HOG特征descriptor。
7)將圖像image內的所有block的HOG特征descriptor串聯起來就可以得到該image(你要檢測的目標)的HOG特征descriptor了。這個就是最終的可供分類使用的特征向量了。
具體每一步的詳細過程如下:
(1)標準化gamma空間和顏色空間
為了減少光照因素的影響,首先需要將整個圖像進行規范化(歸一化)。在圖像的紋理強度中,局部的表層曝光貢獻的比重較大,所以,這種壓縮處理能夠有效地降低圖像局部的陰影和光照變化。因為顏色信息作用不大,通常先轉化為灰度圖;
Gamma壓縮公式: 比如可以取Gamma=1/2;
比如可以取Gamma=1/2;
(2)計算圖像梯度
計算圖像橫坐標和縱坐標方向的梯度,并據此計算每個像素位置的梯度方向值;求導操作不僅能夠捕獲輪廓,人影和一些紋理信息,還能進一步弱化光照的影響。
圖像中像素點(x,y)的梯度為:
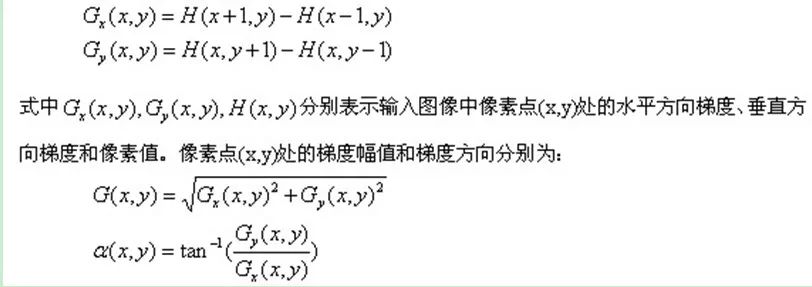
最常用的方法是:首先用[-1,0,1]梯度算子對原圖像做卷積運算,得到x方向(水平方向,以向右為正方向)的梯度分量gradscalx,然后用[1,0,-1]T梯度算子對原圖像做卷積運算,得到y方向(豎直方向,以向上為正方向)的梯度分量gradscaly。然后再用以上公式計算該像素點的梯度大小和方向。
(3)為每個細胞單元構建梯度方向直方圖
第三步的目的是為局部圖像區域提供一個編碼,同時能夠保持對圖像中人體對象的姿勢和外觀的弱敏感性。
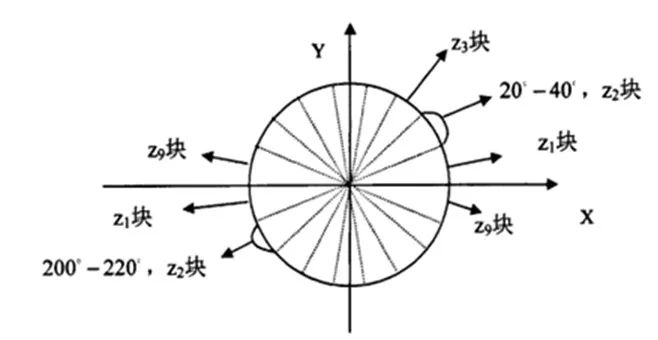
我們將圖像分成若干個“單元格cell”,例如每個cell為6*6個像素。假設我們采用9個bin的直方圖來統計這6*6個像素的梯度信息。也就是將cell的梯度方向360度分成9個方向塊,如圖所示:例如:如果這個像素的梯度方向是20-40度,直方圖第2個bin的計數就加一,這樣,對cell內每個像素用梯度方向在直方圖中進行加權投影(映射到固定的角度范圍),就可以得到這個cell的梯度方向直方圖了,就是該cell對應的9維特征向量(因為有9個bin)。
像素梯度方向用到了,那么梯度大小呢?梯度大小就是作為投影的權值的。例如說:這個像素的梯度方向是20-40度,然后它的梯度大小是2(假設啊),那么直方圖第2個bin的計數就不是加一了,而是加二(假設啊)。
細胞單元可以是矩形的(rectangular),也可以是星形的(radial)。
(4)把細胞單元組合成大的塊(block),塊內歸一化梯度直方圖
由于局部光照的變化以及前景-背景對比度的變化,使得梯度強度的變化范圍非常大。這就需要對梯度強度做歸一化。歸一化能夠進一步地對光照、陰影和邊緣進行壓縮。
作者采取的辦法是:把各個細胞單元組合成大的、空間上連通的區間(blocks)。這樣,一個block內所有cell的特征向量串聯起來便得到該block的HOG特征。這些區間是互有重疊的,這就意味著:每一個單元格的特征會以不同的結果多次出現在最后的特征向量中。我們將歸一化之后的塊描述符(向量)就稱之為HOG描述符。
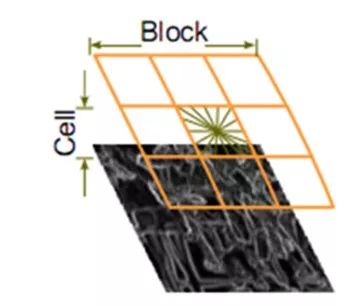
區間有兩個主要的幾何形狀——矩形區間(R-HOG)和環形區間(C-HOG)。R-HOG區間大體上是一些方形的格子,它可以有三個參數來表征:每個區間中細胞單元的數目、每個細胞單元中像素點的數目、每個細胞的直方圖通道數目。
例如:行人檢測的最佳參數設置是:3×3細胞/區間、6×6像素/細胞、9個直方圖通道。則一塊的特征數為:3*3*9;
(5)收集HOG特征
最后一步就是將檢測窗口中所有重疊的塊進行HOG特征的收集,并將它們結合成最終的特征向量供分類使用。
(6)那么一個圖像的HOG特征維數是多少呢?
順便做個總結:Dalal提出的Hog特征提取的過程:把樣本圖像分割為若干個像素的單元(cell),把梯度方向平均劃分為9個區間(bin),在每個單元里面對所有像素的梯度方向在各個方向區間進行直方圖統計,得到一個9維的特征向量,每相鄰的4個單元構成一個塊(block),把一個塊內的特征向量聯起來得到36維的特征向量,用塊對樣本圖像進行掃描,掃描步長為一個單元。最后將所有塊的特征串聯起來,就得到了人體的特征。例如,對于64*128的圖像而言,每16*16的像素組成一個cell,每2*2個cell組成一個塊,因為每個cell有9個特征,所以每個塊內有4*9=36個特征,以8個像素為步長,那么,水平方向將有7個掃描窗口,垂直方向將有15個掃描窗口。也就是說,64*128的圖片,總共有36*7*15=3780個特征。
-
算法
+關注
關注
23文章
4612瀏覽量
92901 -
hod
+關注
關注
0文章
4瀏覽量
1936
原文標題:目標檢測的圖像特征提取之HOG特征
文章出處:【微信號:Imgtec,微信公眾號:Imagination Tech】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
手背靜脈特征提取算法
圖像的深淺特征應用于人臉識別
基于Joint+HOG特征復雜場景下的頭肩檢測

基于HOG的快速人體檢測方法

基于Gabor的特征提取算法在人臉識別中的應用
關于HoG算法的介紹
HOG特征提取算法并行加速
圖像識別中人體檢測的HOG特征提取方法解析
融合多尺度HOG特征和語義屬性的合成素描人臉識別






 工商網監
工商網監
評論