

編者語:「智駕最前沿」微信公眾號后臺回復:C-0572,獲取本文參考報告:《信達證券:端到端革命開啟,強者愈強時時代即將來臨》pdf下載方式。
隨著科技進步和汽車技術的發展,智能駕駛時代已然到來,智能駕駛技術也成為眾多車企研究的重點方向。而在這個過程中,端到端架構(End-to-End, E2E)作為核心技術,逐漸嶄露頭角,成為推動智能駕駛的關鍵力量。
汽車智能化:從傳統技術到智能駕駛
1.1汽車制造的歷史變遷
從內燃機汽車時代到電動汽車時代的過渡,全球汽車產業經歷了數次技術革新。燃油車時代,車企的核心競爭力主要體現在發動機、變速箱和底盤的機械技術上。歐美和日本的傳統車企,如大眾、豐田等,通過多年的技術積累和創新,形成了難以逾越的技術壁壘。自主品牌則很難在這些技術領域實現突破,因此更多依賴與外資品牌的合作。隨著電動化浪潮的到來,汽車的結構開始簡化。電池、電機和電控系統逐漸取代了傳統發動機成為核心部件,整車的機械復雜度顯著下降。與此同時,造車門檻大幅降低,越來越多的新勢力車企迅速涌現,如蔚來、小鵬等通過外購成熟的供應鏈方案進入市場,形成了“百家爭鳴”的格局。
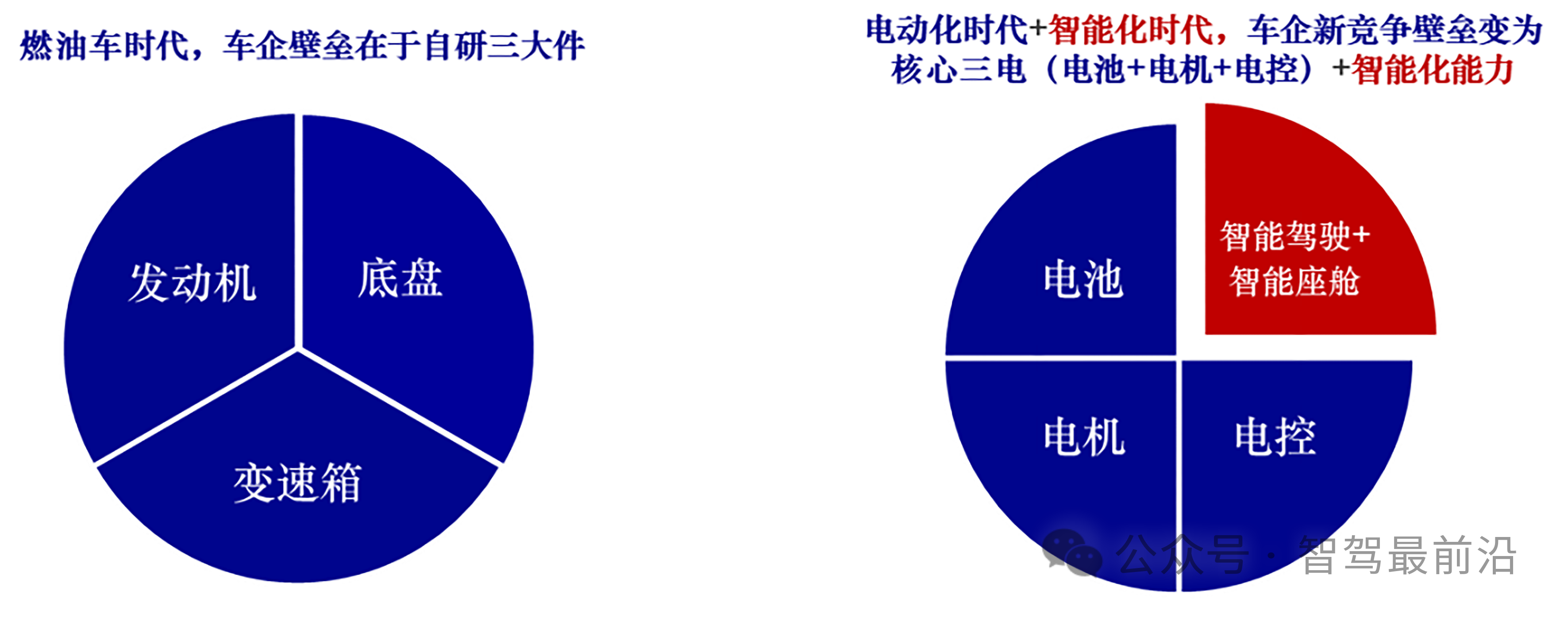
不同汽車時代車企競爭力壁壘變遷
1.2智能化轉型中的新競爭壁壘
電動化只是汽車技術變革的第一步,智能化才是下一步的關鍵。尤其在自動駕駛技術的發展中,數據和算力成為新的競爭核心。智能駕駛不僅需要車輛感知環境,還要求車輛能夠自主做出復雜的決策,并在各種駕駛場景中安全行駛。實現這一目標的基礎,是大量的訓練數據和強大的計算能力。而端到端架構正是在這一背景下應運而生,通過整合深度神經網絡和數據驅動的技術方法,端到端架構能夠顯著提升自動駕駛的性能和效率,使得那些擁有大量數據和算力的企業在競爭中占據先機。因此,端到端架構的崛起讓汽車行業的競爭壁壘從傳統的機械制造,轉向了數據和算法的領域。
端到端架構的技術基礎與發展路徑
2.1端到端架構的基本定義
端到端架構是指從輸入數據(如傳感器采集的環境信息)到輸出控制指令(如車輛轉向、剎車等)的整個過程都通過深度神經網絡模型來完成,而不再依賴人為預設的規則。與傳統的自動駕駛系統不同,端到端架構通過學習和理解駕駛場景中的數據來生成最優決策。在傳統的自動駕駛架構中,任務被分為多個模塊,如感知、定位、決策、控制等,每個模塊獨立執行各自的功能,并通過模塊間的接口傳遞信息。這種架構的優點是模塊化開發方便調試,但其缺點也顯而易見:模塊間信息傳遞時會出現延遲和數據損耗,且難以適應復雜的道路場景。
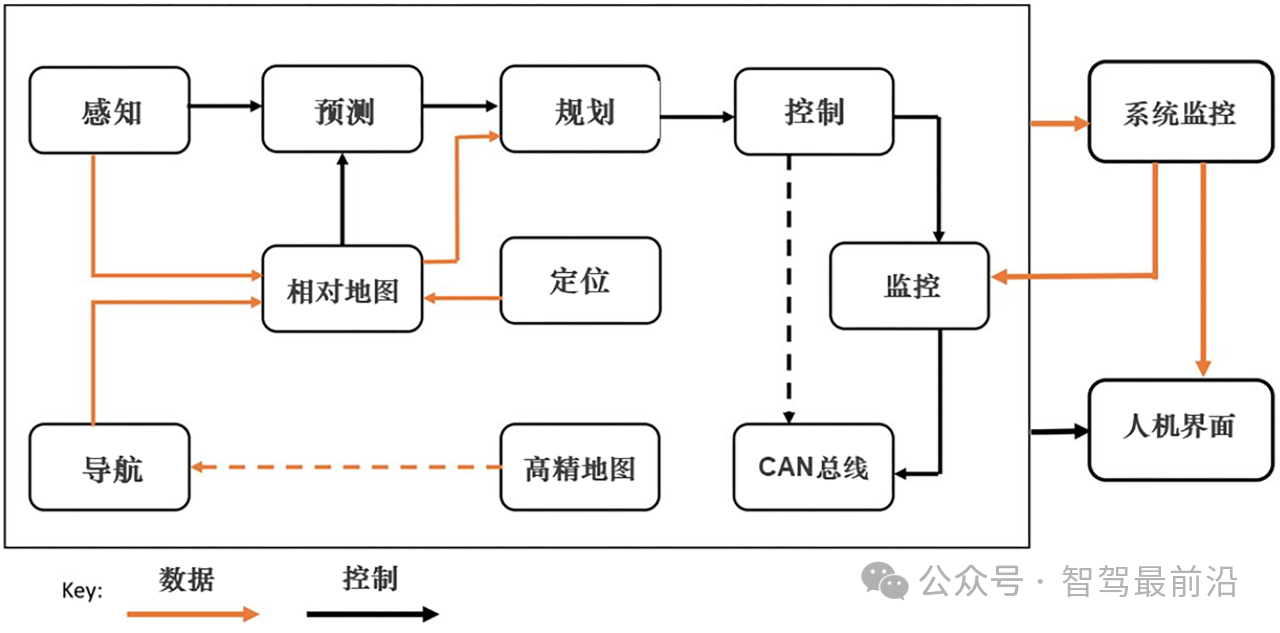
傳統自動駕駛架構
相比之下,端到端架構通過深度學習模型直接處理從環境感知到車輛控制的全部過程,大大減少了信息傳遞的損耗,并能夠通過海量數據的學習,提高決策的準確性和適應性。這使得端到端架構成為未來高階自動駕駛技術的重要基礎。
2.2深度學習技術在端到端架構中的應用
端到端架構依賴于深度學習的進步,尤其是神經網絡模型在圖像處理、語音識別和自然語言處理等領域的廣泛應用。自動駕駛領域中,最常見的深度學習模型包括卷積神經網絡(CNN)和循環神經網絡(RNN)。其中,卷積神經網絡廣泛用于處理來自攝像頭的圖像數據,識別出道路、車輛、行人等信息;循環神經網絡則用于處理車輛運動中的時間序列數據,如車輛的速度、加速度等。這些模型的核心原理是通過前向傳播和反向傳播的訓練過程,不斷調整神經網絡中的權重和偏差,輸出最優的決策結果。在自動駕駛的場景中,系統通過輸入來自環境的多模態數據(如攝像頭、激光雷達、超聲波等),經過深度學習模型的多層處理,最終生成具體的駕駛指令。一個典型的端到端神經網絡架構,通常包含多個隱藏層,每個隱藏層都對輸入數據進行進一步的特征提取。例如,在識別一個紅綠燈時,第一層隱藏層可能會識別出光的強度變化,第二層隱藏層則會識別出紅綠燈的形狀,第三層則會判斷當前燈光的顏色,從而生成最終的控制信號。
2.3端到端架構的技術演進:從感知到一體化
端到端架構的發展可以分為以下幾個階段:感知端到端:這一階段,主要集中在感知任務的端到端實現,通過攝像頭和激光雷達等傳感器,利用神經網絡模型處理周圍環境數據,并直接生成感知結果。目前,這一模式已經較為成熟,尤其是在城市道路的自動駕駛場景中,能夠實現車輛對復雜環境的精準感知。模塊化端到端:模塊化端到端是指在感知端的基礎上,將感知、決策和控制整合為一個模塊化的系統。雖然各模塊間仍然存在信息接口,但神經網絡的引入讓系統能夠更好地實現信息傳遞與整體優化。與傳統模塊化架構相比,這一階段減少了數據損耗,并提升了算法的整體效率。一體化端到端:這一階段,端到端架構將徹底消除模塊間的界限,所有的感知、決策和控制任務將通過一個單一的神經網絡模型完成。這個模型將不僅僅局限于單一任務,而是具備更廣泛的泛化能力,能夠應對復雜和未知的場景。未來的端到端架構或將結合強化學習和模仿學習,實現真正的一體化自動駕駛。
端到端架構的優勢與技術挑戰
3.1端到端架構的技術優勢
與傳統的模塊化自動駕駛系統相比,端到端架構具備以下技術優勢:數據驅動的全局優化:端到端模型依賴于大量的駕駛數據,通過持續的學習和訓練,能夠對整體任務進行全局優化,快速糾正錯誤并提升系統的準確性。這種數據驅動的方式使得系統能夠在不同場景下靈活應對復雜的駕駛環境。減少信息傳遞損耗:在傳統模塊化架構中,信息在不同模塊之間傳遞時,常常會出現數據壓縮、延遲和誤差累積等問題。端到端架構通過神經網絡的直接處理,減少了這些中間環節,避免了信息的損耗。泛化能力更強:端到端架構能夠通過神經網絡模型學習大量的駕駛數據,提升系統應對長尾場景和極端情況的能力。例如,面對道路施工、臨時障礙物或突發天氣情況,端到端模型可以根據之前學到的駕駛經驗,快速做出相應的決策。這種泛化能力使得端到端架構的適應性比傳統的基于規則的系統更強。
3.2數據與算力:端到端架構的核心瓶頸
盡管端到端架構在技術上具備諸多優勢,但其成功的關鍵在于數據和算力的支持。數據挑戰:端到端架構依賴于大量的高質量數據,而這些數據的獲取成本極高。對于車企來說,確保數據的多樣性和準確性是端到端架構成功的關鍵。例如,特斯拉通過其龐大的FSD用戶群體,能夠持續收集全球范圍內的駕駛數據,這使得其端到端模型能夠不斷優化。然而,對于中小車企來說,如何積累海量數據仍然是一個巨大的挑戰。
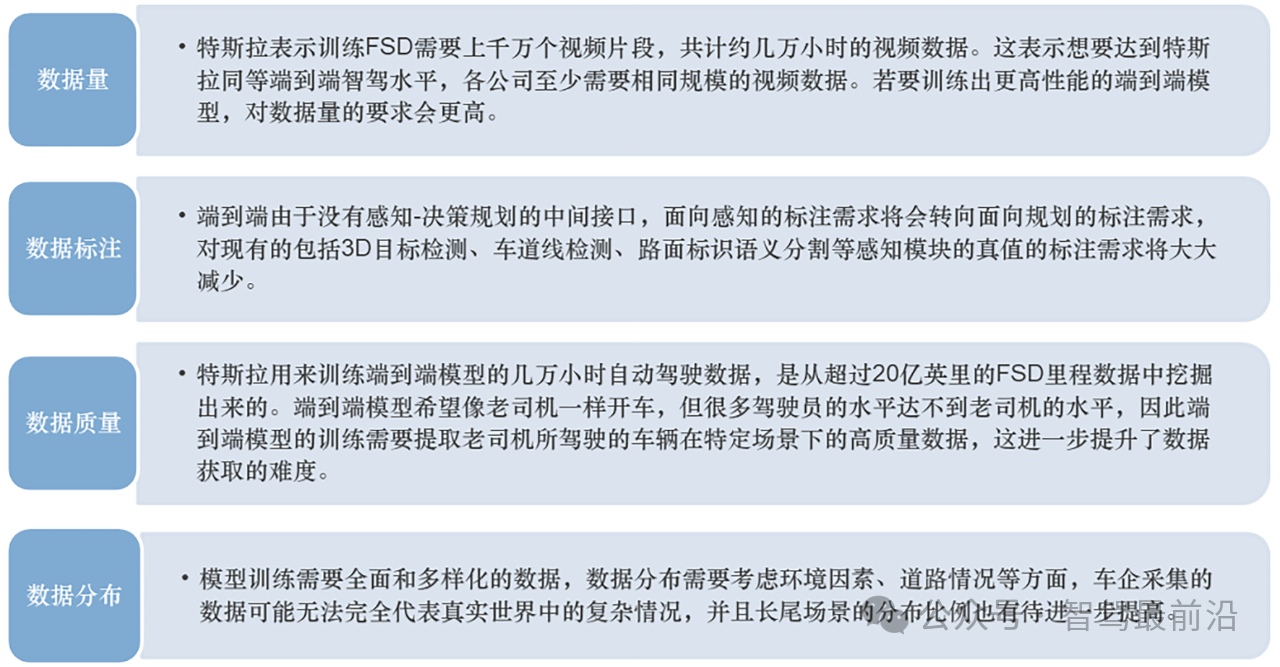
端到端對數據的要求
算力挑戰:端到端模型的訓練需要強大的算力支持。當前,端到端架構的模型規模和復雜度不斷增加,算力需求也在迅速攀升。特斯拉、華為等公司通過自建計算中心,部署了數萬張GPU卡片來支持模型的訓練。而在未來,隨著技術的發展,車企將需要更多的算力來處理更復雜的自動駕駛場景,這也使得算力成為車企競爭的核心。
行業案例與實踐:端到端架構的應用現狀
4.1特斯拉的FSD系統:端到端架構的先行者
特斯拉作為端到端自動駕駛技術的先行者,其FSD(Full Self Driving)系統自2020年發布以來,已經進行了多次迭代。特斯拉通過其全球范圍內的FSD測試用戶,不斷收集駕駛數據,并通過端到端神經網絡模型實現對道路、行人和交通信號燈的精準識別。
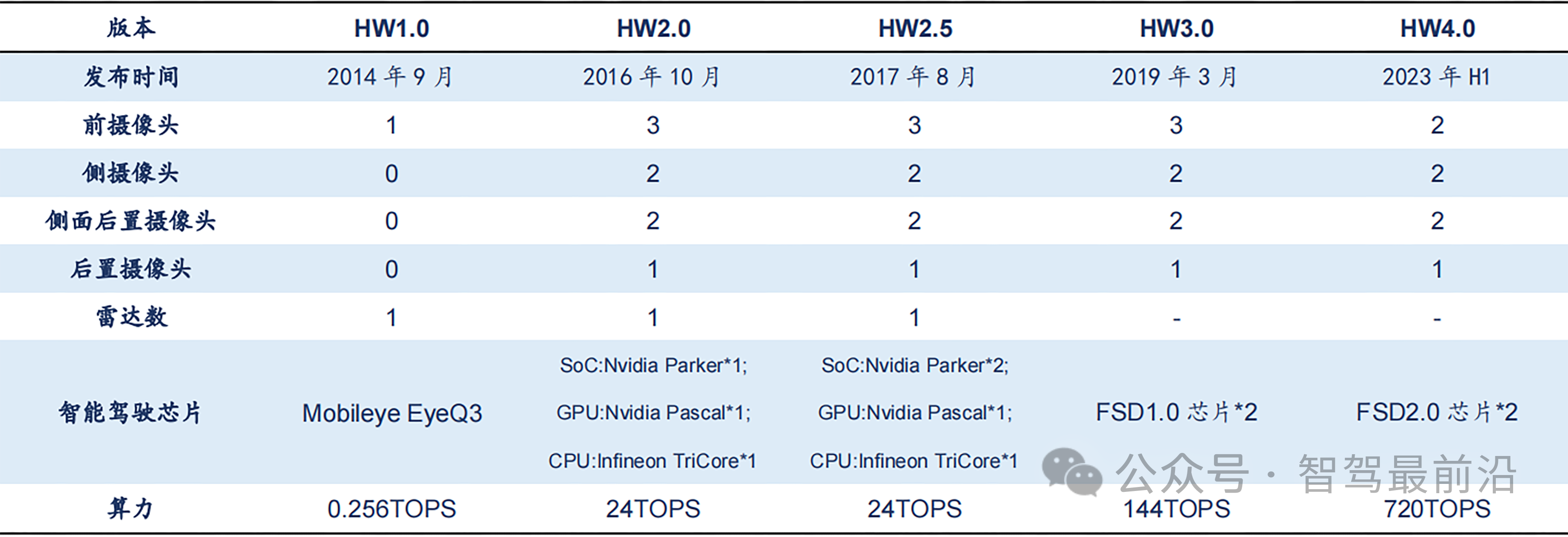
特斯拉智能駕駛硬件迭代歷程(HW1.0-HW4.0)
目前,特斯拉的FSD系統已經能夠在城市街道和高速公路上實現自動駕駛,并逐步在全球范圍內推廣。特斯拉的端到端架構在全球自動駕駛市場中占據了領先地位,這得益于其強大的數據閉環和算力支持。通過引入端到端架構,特斯拉的FSD系統顯著提升了自動駕駛的流暢性和安全性。尤其是在復雜的城市環境中,FSD能夠處理各種突發情況,如行人橫穿馬路、前方車輛突然減速等。此外,特斯拉通過其強大的算力集群,持續對FSD系統進行更新和優化,不斷提升駕駛體驗。
4.2國內車企的端到端技術實踐
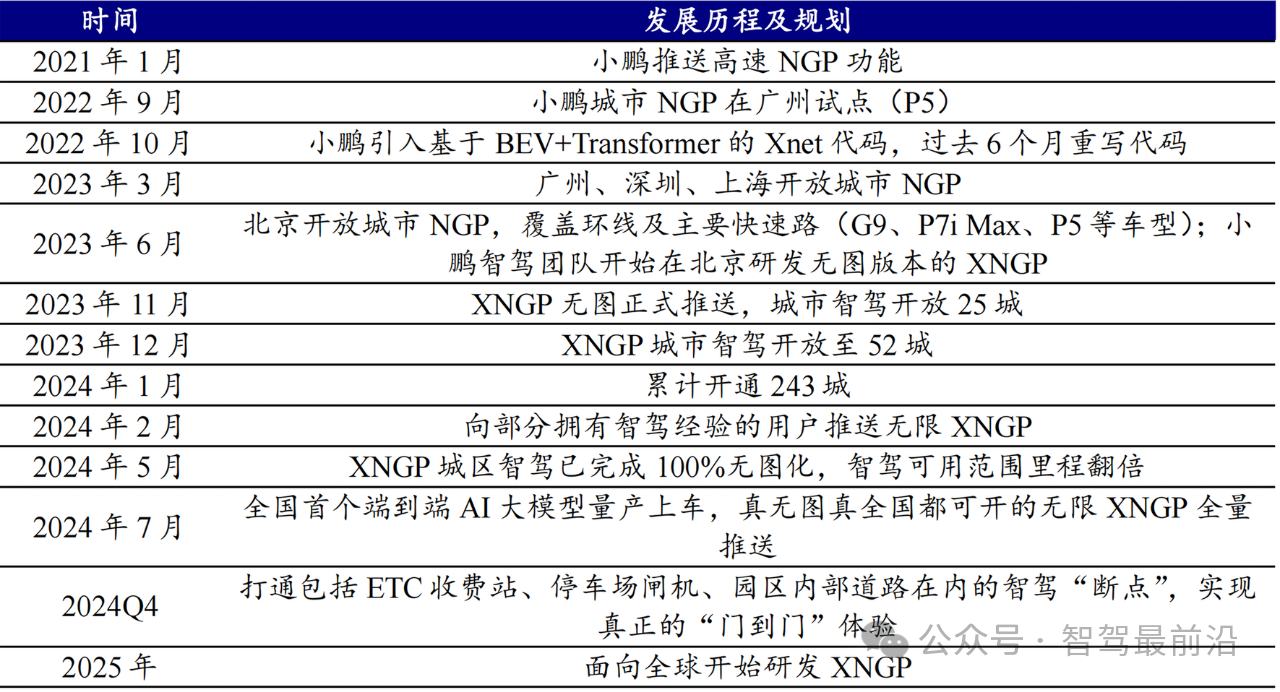
在國內,華為、小鵬、理想等車企也在積極布局端到端自動駕駛技術。其中,華為的ADS系統通過深度學習模型,實現了感知、決策、控制的端到端整合,成為國內端到端自動駕駛技術的代表之一。小鵬汽車則通過其XNGP系統,將端到端技術應用于城市道路的自動駕駛場景中。小鵬的端到端架構通過攝像頭和激光雷達等傳感器數據的融合,能夠在沒有高清地圖的情況下,實現對復雜道路環境的感知和決策。此外,小鵬還通過與云計算平臺的合作,進一步提升其端到端模型的訓練效率和適應性。

小鵬模塊化端到端算法架構
理想汽車則通過引入VLM(Visual-Language Model,視覺語言模型)大模型,提升了端到端系統的可解釋性和精度。通過結合端到端神經網絡與大模型,理想的自動駕駛系統能夠更好地理解交通標志、路況等信息,從而做出更準確的駕駛決策。

理想端到端算法架構
端到端架構的政策與法律挑戰
5.1自動駕駛技術的政策推動
自動駕駛技術的發展離不開政策的支持。在全球范圍內,各國政府正逐步出臺相關政策,推動自動駕駛技術的研發和落地。在美國,自動駕駛技術的測試已經在多個州得到了許可,而中國也在加速自動駕駛的立法進程,為智能網聯汽車的規模化應用提供了法律保障。端到端架構作為自動駕駛技術的重要組成部分,也需要面對復雜的政策環境。各國的監管機構將逐步完善相關法規,確保端到端架構在實際應用中的安全性和可控性。未來,端到端架構需要符合更嚴格的安全測試標準,并在事故發生時提供透明的責任劃分機制。
5.2算法的不可解釋性與法律責任
端到端架構的“黑盒”屬性使得其決策過程難以解釋,這在法律責任方面帶來了巨大挑戰。當自動駕駛車輛發生事故時,如何判斷責任歸屬將成為一大難題。尤其在端到端架構下,系統的決策邏輯難以追溯,這使得監管機構和法律體系需要重新評估自動駕駛的責任劃分標準。為了應對這一挑戰,未來可能需要引入更加透明的模型解釋機制,如理想汽車所使用的視覺語言大模型,能夠幫助監管機構理解系統的決策過程。此外,相關法律法規可能會要求車企記錄和存儲每次駕駛決策的詳細數據,以便在發生事故時提供證據支持。
未來的技術趨勢與市場前景
6.1技術趨勢:從端到端到多模態大模型
未來,端到端架構將與多模態大模型相結合,進一步提升自動駕駛系統的智能化水平。通過整合視覺、語言、感知等多種數據源,多模態大模型能夠實現更加精準的環境感知和決策能力。這一技術趨勢將推動自動駕駛從現有的L2+級別向L4/L5級別過渡,實現真正的無人駕駛。此外,世界模型的引入也將改變端到端架構的現狀。通過重建真實世界的物理規律,世界模型將幫助自動駕駛系統更好地理解和預測周圍環境,為自動駕駛系統提供更智能的決策支持。
6.2市場前景:端到端架構的規模化應用
隨著技術的不斷成熟,端到端架構將在未來幾年內實現規模化應用。特斯拉、華為等企業已經在全球范圍內推廣其端到端自動駕駛系統,并逐步積累用戶數據。預計到2030年,全球自動駕駛市場的規模將突破萬億美元,端到端架構將成為其中的核心技術之一。與此同時,自動駕駛芯片制造商、云計算服務提供商等也將從中受益。未來,自動駕駛系統的硬件和軟件需求將持續增長,推動相關產業鏈的發展和升級。
總結
端到端架構作為自動駕駛技術的革命性進展,正在推動整個行業向前邁進。憑借其數據驅動、深度學習和強大算力的支持,端到端架構具備顯著的技術優勢,能夠大幅提升自動駕駛的性能和決策效率。然而,端到端架構仍然面臨數據、算力和法律責任等多方面的挑戰。隨著政策的逐步完善和技術的持續迭代,端到端架構有望成為未來智能駕駛的主流解決方案。行業內的頭部企業將在這一過程中占據主導地位,而中小車企則需要加速技術研發,跟上行業的步伐。未來,隨著端到端技術的普及,全球汽車行業將迎來真正的智能駕駛時代。
審核編輯 黃宇
-
自動駕駛
+關注
關注
788文章
14050瀏覽量
168200 -
深度學習
+關注
關注
73文章
5531瀏覽量
122070 -
大模型
+關注
關注
2文章
2854瀏覽量
3522
發布評論請先 登錄
相關推薦

小米汽車端到端智駕技術介紹

Skype提供端到端加密“私人對話”功能 讓你對話更安全

端到端模型卷入智駕圈 周光:今年上車!



智駕進程發力?小鵬、蔚來端到端模型上車
智己汽車“端到端”智駕方案推出,老司機真的會被取代嗎?

爆火的端到端如何加速智駕落地?

特斯拉帶火“端到端”智駕,國內車企加速上車

黑芝麻智能端到端算法參考模型公布






 工商網監
工商網監

評論