 關于基于TDOA技術的工廠人員安防定位系統設計
關于基于TDOA技術的工廠人員安防定位系統設計
引言
現代化工廠已不是簡單的生產與加工場地,它是包括了辦公區域、生產研發、特種作業、倉庫、餐廳后勤、停車場等多種場所的復雜區域。化工廠的火災爆炸、機械廠的機械傷害、建筑工地的高處墜落以及生產車間的粉塵爆炸等事故在世界各地頻發,大多數都是因人的不安全行為或者物的不安全狀態導致的,因此安全生產是工廠賴以生存的根本。與此同時,工廠人員多樣性使得管理者需要花費更多的精力與時間,但最后的效果卻很不理想。
由于目前的到達時差(Time Difference Of Arrival,TDOA)[1]技術具有理論清晰、定位方法優化、定位精度高,以及所用的超寬帶UWB[2]脈沖穿透能力強、信號保真且速率快等優點,本文提出了一種基于該定位技術的工廠人員安防定位系統設計方案,結合對現代工廠的安全隱患進行多方面的分析與總結,設計出針對前述不安全問題的人員安防定位安防系統。整個安防定位系統經過系統結構設計[3]、防控功能設計[4]、運行流程設計而成,不僅對傳統的視頻監控起到了輔助補充作用,還提高了管理者對整個工廠人員與機械管理效率。
1 TDOA定位技術
TDOA定位簡單來理解就是到達時間差,即移動待測目標(Mobile station)發出UWB(Ultra Wideband)超寬帶脈沖信號到兩個基站(Base Station)接收信號的時間差。系統只需要同步基站之間的時鐘即可,避免移動待測目標因時鐘不穩定而導致的誤差。TDOA定位技術只需要得到時間差而非絕對的時間點,時間誤差小,定位精度高。而到達時間(Time Of Arrival,TOA)定位技術則要求基站與移動目標保持嚴格的時間同步,這一要求在大多數情況下難以達到。
1.1 TDOA定位原理
TDOA定位技術是安防定位系統的重要基礎。TDOA定位原理來源于雙曲線特性,即雙曲線上的任意一點到兩焦點的距離差相等,圖1所示為兩段相交雙曲線,其中L1、L2、L3分別是移動待測目標到基站1(BS1)、基站2(BS2)、基站3(BS3)的距離。
1.2 TDOA定位算法
假設移動待測目標的坐標為(x,y,z),已知第n個基站的坐標為(xn,yn,zn),在此以第一個基站作為時鐘參考基站, 即可推導出三維立體空間數學方程組:
求解三維立體空間數學方程組:
高斯-馬爾科夫定理表明,當各誤差向量分量的方差相同時,誤差方差最小定位精度達到最優。
2 安防定位系統設計
在安防定位系統的設計過程中,根據TDOA定位技術[6]特性,本文通過系統結構設計、防控功能設計以及運行流程設計三部分,系統、清晰地呈現了系統的主體。
2.1 結構設計
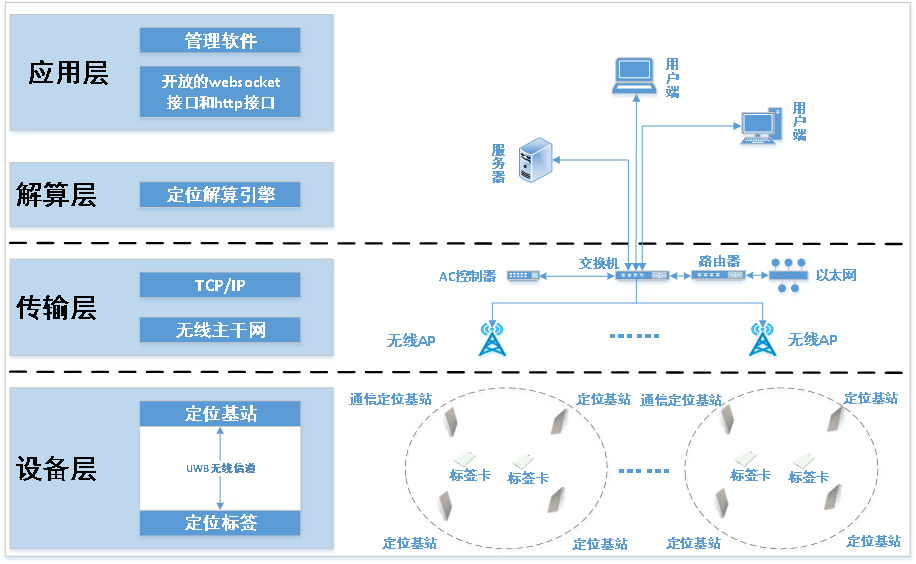
安防定位系統與已有的安防系統不會相互沖突,有輔助作用與增強原有的安防效果。以此為目標,設計了如圖2所示的定位安防系統結構示意圖,整個定位系統包括三部分:脈沖信號接收與處理、無線網絡覆蓋系統以及終端控制顯示系統(如果有功能整合的需要,終端控制顯示系統和控制室終端預警與控制系統可以合二為一)。
脈沖信號接收與處理的設備搭建方式有3種:存在性定位、一維定位、二維及三維定位。從圖2可知,存在性定位通過一個微基站就能完成,一維定位需要兩個微基站,二維、三維則需要3個及以上微基站定位。脈沖信號接收與處理過程是電子標簽負責發出特定編碼信號,微基站接收信號并解碼計算出兩者之間的距離。無線網絡覆蓋系統主要是利用工廠現有的電力線系統安裝通信調制解調器接通寬帶進行無線網絡覆蓋,微基站通過無線網絡與系統進行數據信息傳輸交換,這種利用現有電力線形成的無線局域網絡信號穩定、傳輸速度快且避免了傳統復雜的網絡布線,提高效率節約成本。終端控制顯示系統通過網絡得到微基站傳輸的數據信息,即每個電子標簽與微基站的距離,然后系統通過編寫好的MATLAB算法得出待測移動目標的坐標。
2.2 防控功能設計
TDOA定位技術是安防定位系統中基礎且重要的部分,但對于工廠中存在的各類安全隱患就需要運用TDOA定位技術以及機器視覺等技術有針對性地進行功能設計,圖3所示為精確定位與不安全狀態監測系統,涉及機器視覺檢測人員準入、實時虛擬警戒線、電子警戒墻以及報警裝置。
工廠員工以及外來人員的定位需要配置電子工作牌標簽,系統通過電子工作牌發出的實時脈沖信號計算出對應人員或機械的坐標來實現定位。由于部分車間空間較大,使用旋轉云臺攝像代替傳統的全方位布控攝像頭,利用定位系統來控制云臺旋轉攝像。整個車間相當于一個三維坐標系,人與機器為坐標點,將車間中的危險區域與特種作業區域進行有等級權限的虛擬空間劃分,如高壓危險區域、庫房重地等,一旦人員進入已設定網格內就會識別判斷身份信息,在非特種作業人員或者外來沒有權限人員進入時立刻產生警報,同時劃定區間內的攝像設備拍照記錄信息。
除了人員定位,系統還配備不安全狀態監測,比如對員工的特種作業服飾要求、安全帽以及絕緣手套等,經過攝像頭拍攝在終端控制系統及預警系統中進行分析處理得出結果,圖4為控制室終端預警與控制系統。在視覺算法方面,系統添加了更高級的神經網絡、機器學習、大數據處理等技術用來處理各種不安全狀況。
2.3 運行流程設計
電子標簽(超寬帶脈沖運用開關三極管的短暫良性雪崩效應)發射特定編碼的脈沖信號,微基站接收脈沖時間,通過時間差求出電子標簽與基站之間的距離,使用TDOA定位原理計算移動目標坐標。安防定位系統按照劃分好的空間進行識別監控,對達到危險區域內的非專業工作人員不安全狀態進行分析處理,最后通過終端控制系統發出警告并將實時狀態信息分類保存。整個系統都是自動進行的,管理者可隨時查看信息記錄,工作流程如圖5所示。
3 系統結果分析
人員安防定位系統是以TDOA定位技術為基礎,進行算法編寫、軟件制作、系統功能設計。在設備安裝完備的前提下,電子標簽與微基站的距離測量值誤差控制在0.1 m內;通過TDOA定位算法得到的人員坐標,橫縱坐標誤差控制在0.2 m內;虛擬警戒線、電子警戒墻等空間劃分正確,與人員、機械的位置信息交互精確;攝像聯動方面,坐標信息能控制相機云臺旋轉拍攝;視頻信息能在系統機器視覺算法的處理下,及時反饋預警信息;利用顯示記錄功能,管理者能隨時查詢人員位置與軌跡信息,調出實時攝像畫面,統計考勤。利用現有實驗條件進行3組實驗,實驗結果及誤差分析如表1所示。
4 結論
本文所提出的基于TDOA定位技術的工廠安防定位系統是現代化監控系統的一個低成本、低能耗、高效率、高可靠性的輔助系統,主要特點包括:
(1)采用了目前最新型實用的TDOA定位技術,能跳出時鐘誤差問題達到提高精度的目的。該技術利用了雙曲線特性,通過最小二乘求解矩陣得到最為精確的坐標。
(2)解決了現代化大型工廠人員基數大、種類復雜難以有秩序地管理問題。在本設計中,將工廠人員按照工種、工作區域劃分空間,系統能快速記錄人員的出入考勤狀況,也能記錄在工廠中的運動軌跡。
(3)完成了與現代工廠的視頻監控系統的融合輔助。系統能隨時隨地輸入人名或編號查看工人的坐標,并調用坐標區域內的攝像頭查看該坐標區域能的情況,實現了實時監控攝像聯動。
(4)運用了神經網絡、機器學習、大數據處理等技術來處理人員不安全狀況,提高系統預警能力。
(5)補充了現代視頻監控系統中的不足,給大型工廠以及有重大安保需求的產業提供了可靠有效的設計基礎。
-
定位系統
+關注
關注
10文章
584瀏覽量
36482 -
TDoA
+關注
關注
1文章
16瀏覽量
13266
發布評論請先 登錄
相關推薦
UWB定位系統工廠人員定位解決方案
UWB定位技術之定位算法:RSS、AOA、TOA、TDOA
UWB室內定位系統TDOA算法方案介紹

工廠人員定位系統,針對工廠室內外融合系統

工廠人員定位怎么實現?分享工廠人員定位系統解決方案







 工商網監
工商網監
評論