 采用PSoC芯片來驅動變形機翼的分布式超聲電機
采用PSoC芯片來驅動變形機翼的分布式超聲電機
一、項目提出的背景和必要性
變形飛行器(Morphing Aircraft)通過自主改變飛行器的外形來改變飛行器的氣動性能,以適應不同的飛行條件,從而擴展其飛行包線和改善其操作特性,減小阻力,加大航程,減少或消除顫振、抖振和渦流干擾等的影響,從而更有效地完成各種飛行任務。在飛行器的所有部件中,機翼對飛行器的升阻比、極限速度、機動性、操控及穩定性、經濟以及安全性等有極其重要的影響。變形機翼可以根據飛行任務和流場條件要求,通過精確的主動變形,始終保持飛行所需的最佳形狀,從而保證較高的氣動操縱效率。
實現機翼外形大尺度變化的關鍵技術之一就是變形驅動機構及其控制電路的設計。在本項目中,我們采用分布式超聲電機來改變機翼的彎度,對高彈性柔性蒙皮、超聲電機驅動的變形系統、傳感器等進行無縫一體化設計,從而避免機翼氣流分離現象的發生。
超聲電機是利用壓電陶瓷的逆壓電效應和超聲振動的新型微特電機,具有轉矩重量比大、高精度、斷電自鎖等優點,其結構如圖1所示。驅動超聲電機必須施加一定功率的超聲頻段的交流信號給定子上的兩相壓電陶瓷元件,使其產生同頻異相的駐波,并疊加成單一旋轉行波模態,最后通過定子與轉子之間的摩擦作用驅動轉子運動。因此對驅動信號的頻率、相位和幅值都具有一定的要求,在本項目中我們采用PSoC芯片來實現對驅動信號的處理。

圖1 TRUM-40電機結構圖
PSoC芯片拋棄使用分立的邏輯器件搭建驅動和控制電路,將頻率發生、分頻分相、死區調節和部分驅動電路以及控制電路等整合到PSoC中,大大減小了驅動器的復雜程度,同時滿足了驅動器的基本控制要求,可以通過調頻來調節電機轉速。另外,采用PSoC芯片強大的通信功能,實現了多臺分布式超聲電機的協調驅動,自適應地改變機翼外形,從而大大降低了機翼控制系統的復雜度。圖2所示為單臺超聲電機的PSoC驅動電路框圖。
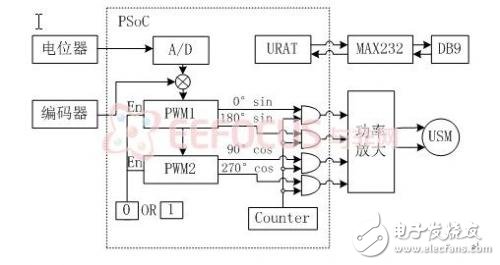
圖2 超聲電機PSoC驅動電路控制框圖
目前,在許多單片機應用系統中,上、下位機分工明確,單片機和上位機之間的數據通信是整個系統的基礎。本項目的上位機為PC機,為了使用電腦控制超聲電機的運行狀態,采用了常用的RS-232串口通信電路給PSoC發送控制指令,然后用VB語言編寫了相關程序和控制界面。
二、創新性
本項目首次提出采用PSoC芯片來驅動變形機翼的分布式超聲電機,從而實現了多臺超聲電機的協調控制和機翼外形的自適應調節。
-
超聲電機
+關注
關注
1文章
44瀏覽量
10112
發布評論請先 登錄
相關推薦
分布式軟件系統
LED分布式恒流原理
分布式能源系統當微型電網技術應用
【小米團隊】小型分布式太陽能系統
基于STM和MSP的分布式多步進電機控制系統設計
如何設計分布式干擾系統?
分布式系統的優勢是什么?
HarmonyOS應用開發-分布式設計
求一種基于CAN總線、GPIB總線和以太網的分布式電機驅動測試系統
如何高效完成HarmonyOS分布式應用測試?
分布式電源分布式電源裝置是指什么?有何特點
常見的分布式供電技術有哪些?
采用DSP芯片的分級分布式管理系統設計
vxworks驅動及分布式編程





 工商網監
工商網監
評論