 激光導航AGV機器人定位精度受哪些因素影響?
激光導航AGV機器人定位精度受哪些因素影響?
AGV
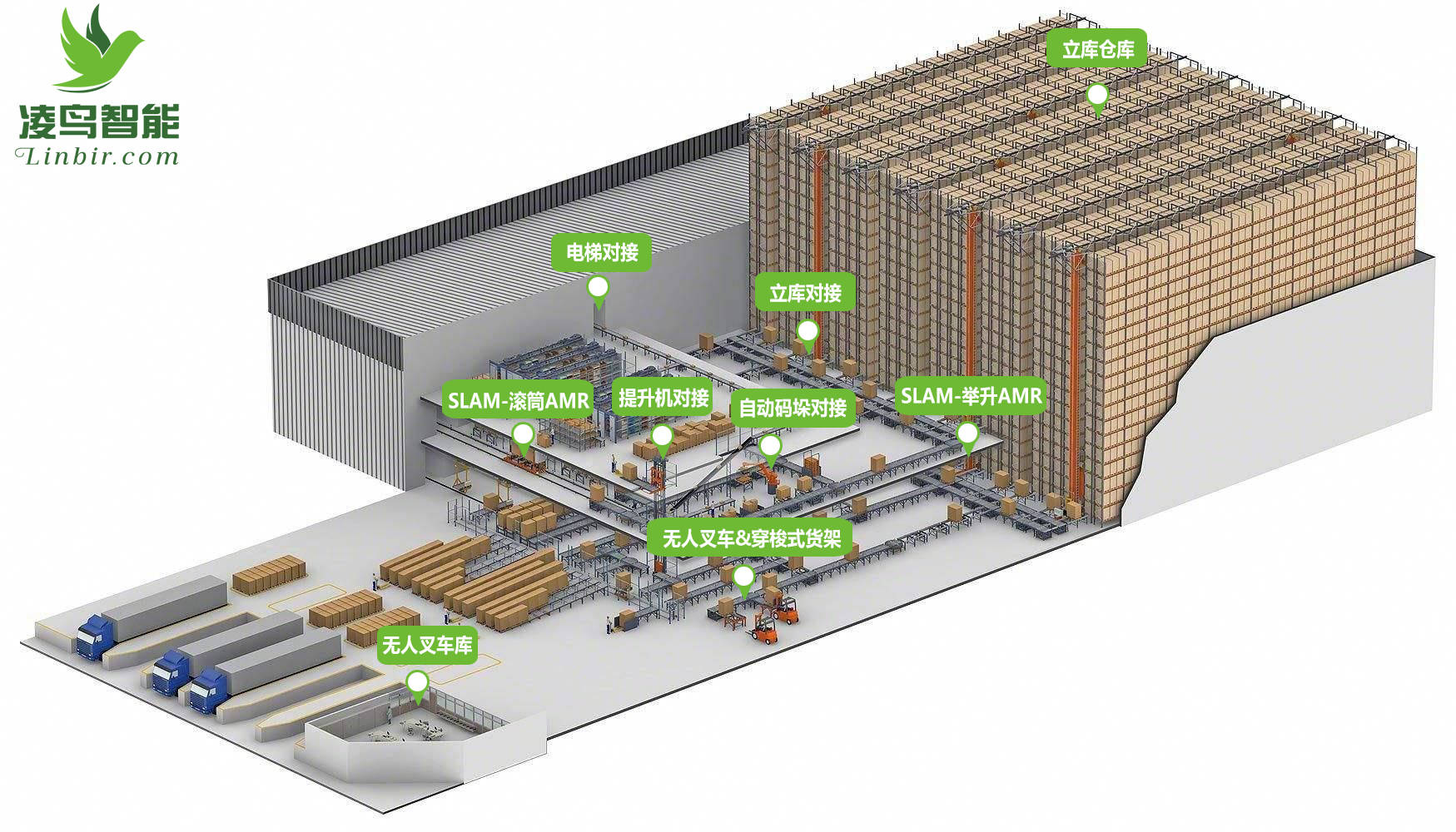
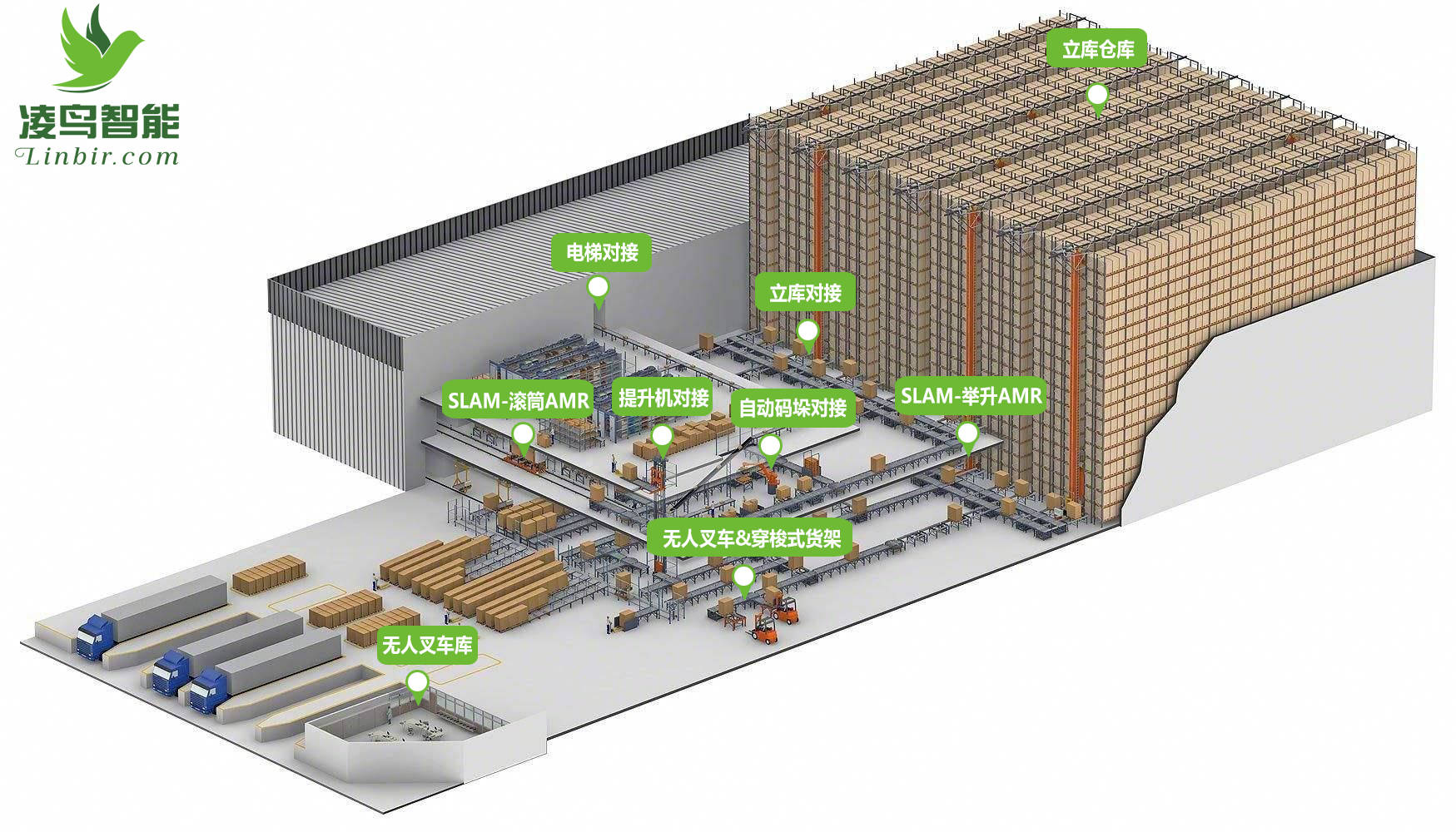
AGV(Automated Guided Vehicle,自動導引車)機器人行業近年來在全球范圍內得到了快速發展,展現出廣闊的市場前景和巨大的發展潛力。未來,隨著技術創新的不斷推進、多樣化與個性化需求的增加以及政策支持和市場需求的共同作用。
AGV倉儲物流
激光導航AGV的定位精度受到環境因素、技術因素和設計因素等多方面的影響。為了提高定位精度和穩定性,我們需要從多個方面入手,采取綜合措施來優化和改進。只有這樣,才能確保激光導航AGV電動平車在復雜環境中實現精準、高效、穩定的運行。
 激光AGV
激光AGV
一、環境因素
1. 光照條件:激光導航依賴于激光束的反射來定位,因此環境光照的強弱會直接影響激光的反射效果。強光環境下,激光可能受到干擾,導致信號衰減或失真;而弱光或黑暗環境中,激光束的可見性降低,也增加了定位的難度。因此,合理控制環境光照,采用遮光罩等輔助設備,是提高定位精度的重要手段。
2. 地面狀況:地面平整度、顏色、材質等都會影響激光的反射特性。例如,光滑的地面可能導致激光束過度反射,形成干擾信號;而粗糙或顏色復雜的地面則可能降低激光的反射強度,使信號難以捕捉。此外,地面上的障礙物、水漬等也可能對激光束造成遮擋或散射,從而影響定位精度。因此,保持地面清潔、平整,減少干擾因素,是確保AGV定位準確的重要前提。
 AGV叉車
AGV叉車
二、技術因素
1. 激光傳感器性能:激光傳感器的精度、穩定性、響應速度等直接影響定位精度。高質量的激光傳感器能夠更準確地捕捉和解析激光束的反射信號,提高定位的準確性。同時,傳感器的抗干擾能力也是衡量其性能的重要指標之一。在復雜環境中,具有較強抗干擾能力的傳感器能夠更有效地抵抗外部干擾,保持定位的穩定性和精度。
2. 算法優化:AGV的定位算法是實現精準定位的關鍵。算法的優化程度直接影響定位速度和精度。先進的算法能夠更快速地處理激光傳感器的數據,更準確地識別環境特征,從而實現更精確的定位。此外,算法的自適應性也是其性能的重要體現。在環境變化或傳感器故障時,算法應能夠自動調整參數或采取應急措施,確保定位的連續性和穩定性。
 AGV小車
AGV小車
三、設計因素
1. 車輛結構:AGV的結構設計也會影響其定位精度。合理的車輛結構能夠減少車身震動和偏移對定位的影響。例如,采用堅固的底盤和穩定的懸掛系統可以確保車輛在行駛過程中保持平穩,減少因顛簸而產生的定位誤差。同時,合理的布局和安裝位置也能夠提高激光傳感器的測量精度和穩定性。
2. 電源管理:電源的穩定性對AGV的運行和定位精度也有重要影響。不穩定的電源可能導致傳感器和控制系統工作異常,從而影響定位精度。因此,采用高質量的電源管理系統和穩定的電源供應是確保AGV定位準確的重要保障。
 堆高AGV
堆高AGV
隨著自動化需求的增加和勞動力成本的上升,AGV機器人作為提高效率和降低成本的解決方案,將在更多領域得到應用和發展,特別是在制造業、物流業等行業中,AGV機器人的應用將越來越廣泛,市場潛力巨大。
審核編輯 黃宇
-
機器人
+關注
關注
211文章
28455瀏覽量
207263 -
AGV
+關注
關注
27文章
1311瀏覽量
41117 -
AGV小車
+關注
關注
4文章
172瀏覽量
11135
發布評論請先 登錄
相關推薦
《具身智能機器人系統》第1-6章閱讀心得之具身智能機器人系統背景知識與基礎模塊

AGV激光導航定位技術與構建地圖

智能呼叫、激光導航、自動避障,為什么AGV機器人被需要?

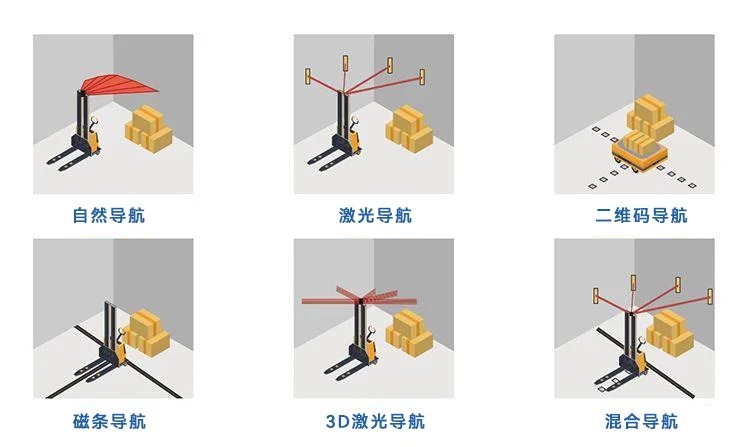
agv叉車激光導航和二維碼導航有什么區別?適用什么場景?選哪種比較好?

AGV搬運機器人的“雙腿”——AGV系統
MT6501 磁編碼 IC 如何助力 AGV 定位采摘機器人精準作業
精準定位,激光領航——激光跟蹤儀助力服務機器人性能提升

agv叉車怎么運行的?速度受哪些因素影響?有哪些不確定因素?

視覺系統輔助引導在激光導航AGV中應用
AGV導航精度怎么更準確?利用3D相機打造更智能的AGV輔助系統
數控機床的加工精度主要受哪些因素影響
激光,磁性,視覺?什么是AGV最好的導航系統?






 工商網監
工商網監
評論