") 節(jié)能攻略,AUTOSAR PN局部網(wǎng)絡(luò)管理技術(shù)!
節(jié)能攻略,AUTOSAR PN局部網(wǎng)絡(luò)管理技術(shù)!
隨著整車功能的不斷演進(jìn),車上各類用電設(shè)備(控制器、執(zhí)行機(jī)構(gòu)、感知設(shè)備等)的用電功耗越來越大,為了降低整車能耗,國(guó)內(nèi)外很多OEM及Tire1都在考慮相關(guān)的機(jī)制及方案,其中PN局部網(wǎng)絡(luò)管理機(jī)制,以其簡(jiǎn)單、靈活的特點(diǎn)獲得眾多落地應(yīng)用。
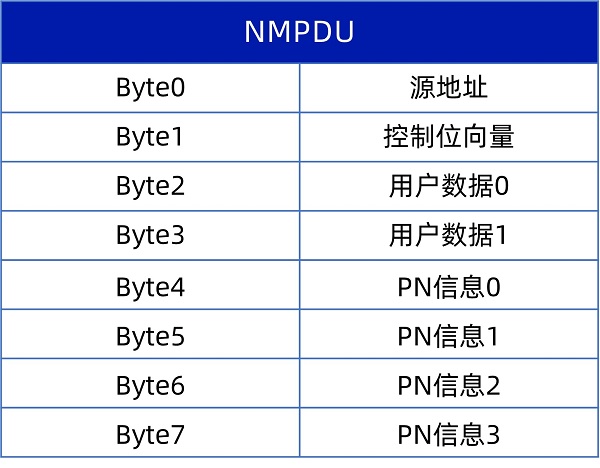
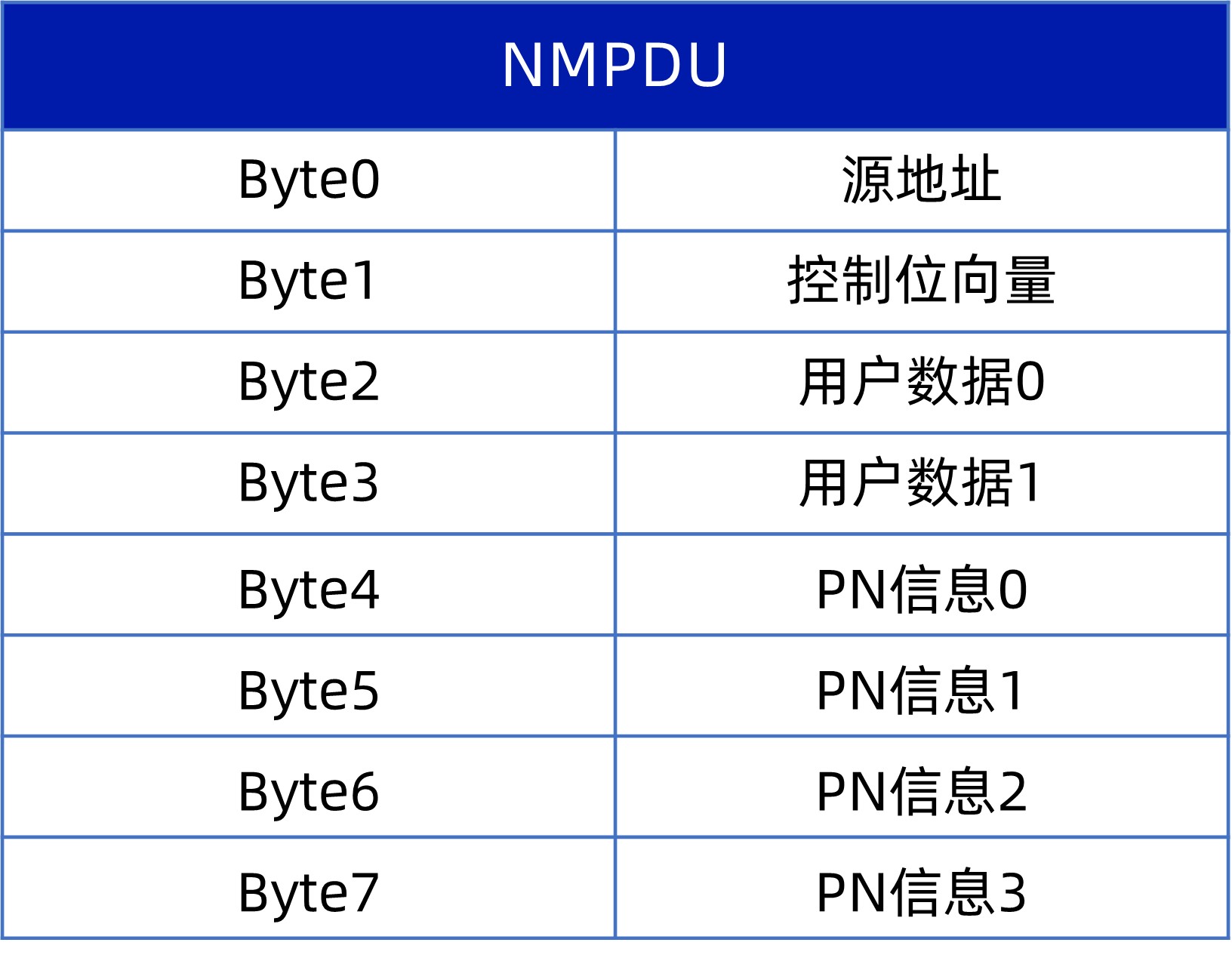
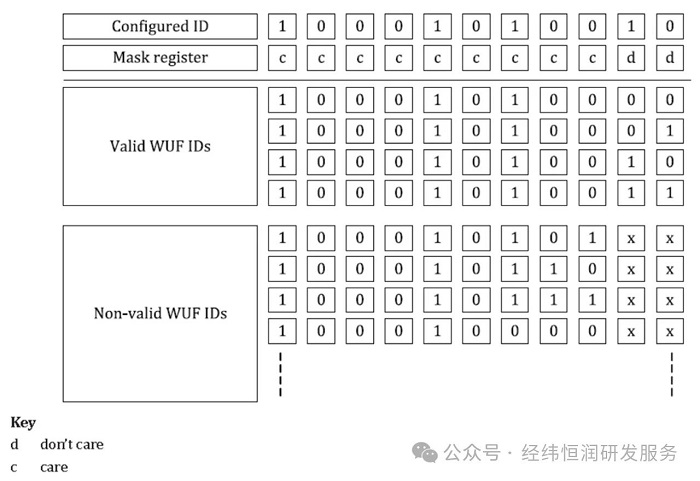
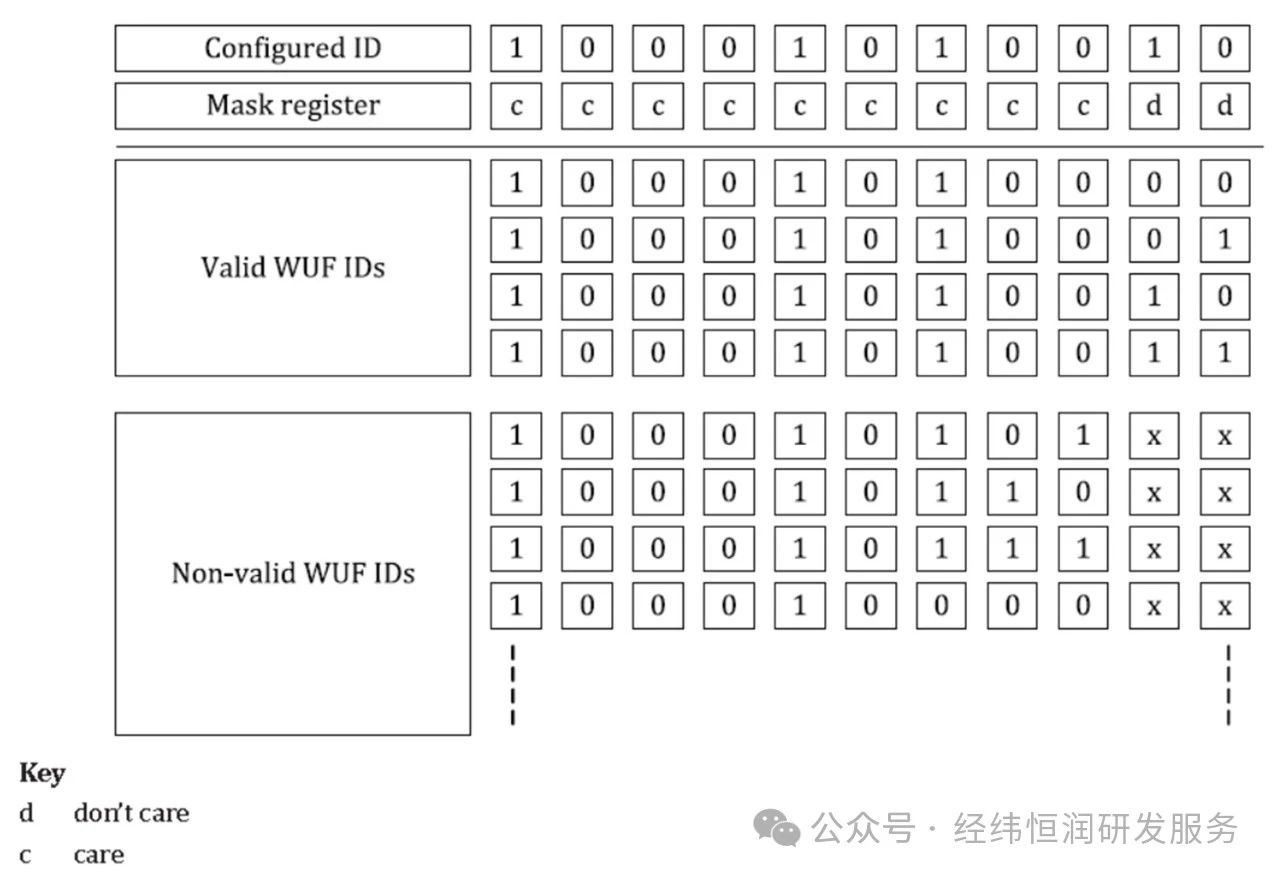
基于AUTOSAR方案的局部網(wǎng)絡(luò)管理機(jī)制,通常簡(jiǎn)稱為AUTOSAR PN(Partial Network),局部網(wǎng)絡(luò)管理本質(zhì)上是要實(shí)現(xiàn)只讓需要支撐功能實(shí)現(xiàn)的控制器工作,其他控制器保持在低功耗狀態(tài)。AUTOSAR PN是通過NM報(bào)文(NMPDU)的方式來達(dá)到此目標(biāo),NMPDU的典型格式如下表所示。
PN開發(fā)流程
當(dāng)前OEM的車型平臺(tái)大多為迭代開發(fā),依托現(xiàn)有平臺(tái)增加PN通常是較快速的方案。所以相較于復(fù)雜、全面的AUTOSAR正向PN開發(fā)方法論,OEM更多采用逆向的開發(fā)方式。逆向的PN開發(fā)流程通過分析當(dāng)前現(xiàn)狀來完成PN的開發(fā),選取整車改動(dòng)較小的方案推進(jìn),整體方案具備輕量化的優(yōu)勢(shì),開發(fā)周期短,過程交互簡(jiǎn)單。

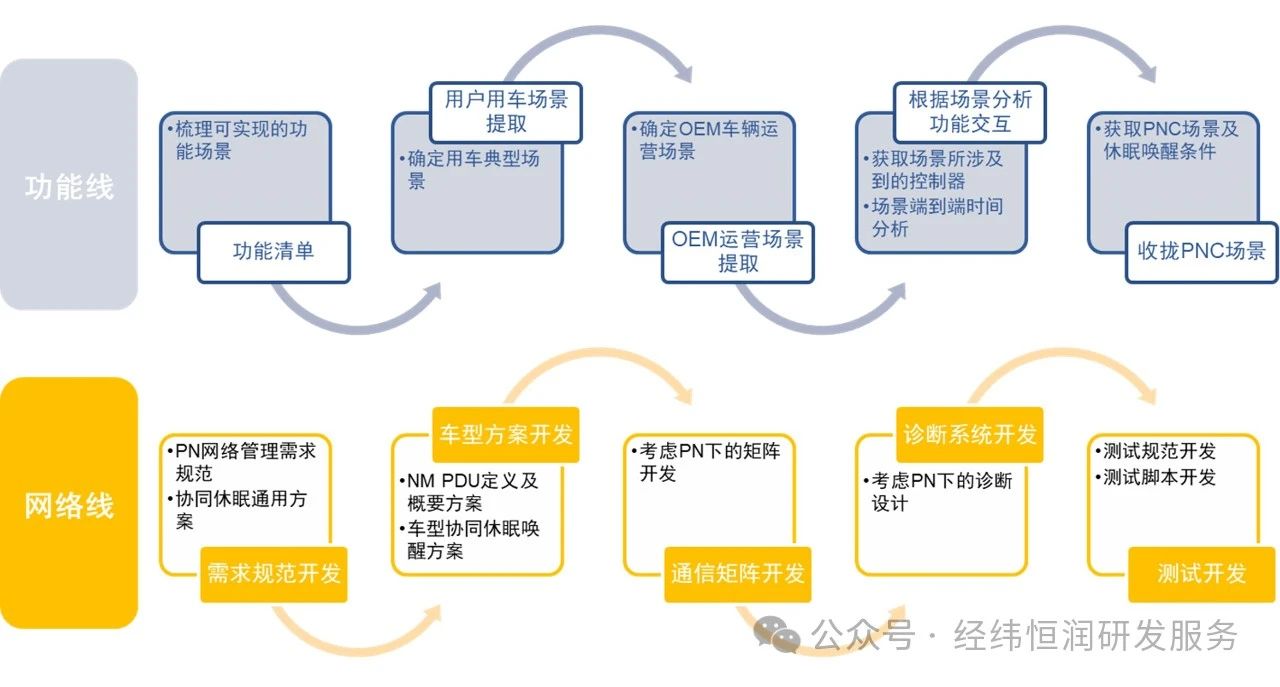
本文重點(diǎn)介紹下逆向開發(fā)的關(guān)鍵步驟:
- 第一步:PN場(chǎng)景設(shè)計(jì)及梳理
結(jié)合整車的功能列表、用車人典型的用車場(chǎng)景及OEM考慮的其他場(chǎng)景,確定車型需開發(fā)的場(chǎng)景范圍,比如全部喚醒、防盜、遠(yuǎn)控、充電等。場(chǎng)景開發(fā)應(yīng)考慮場(chǎng)景觸發(fā)的頻率、給用車客戶帶來的收益以及OEM本身的收益。
- 第二步:PN開發(fā)基礎(chǔ)原則確定
結(jié)合當(dāng)前量產(chǎn)車型的EE架構(gòu),確定一個(gè)基礎(chǔ)的PN開發(fā)規(guī)則,比如開發(fā)全局PN還是部分PN以及基礎(chǔ)的功能鏈路,形成本次開發(fā)的基礎(chǔ)原則文件,輸出到后續(xù)步驟。
- 第三步:PN場(chǎng)景功能鏈路梳理及分析
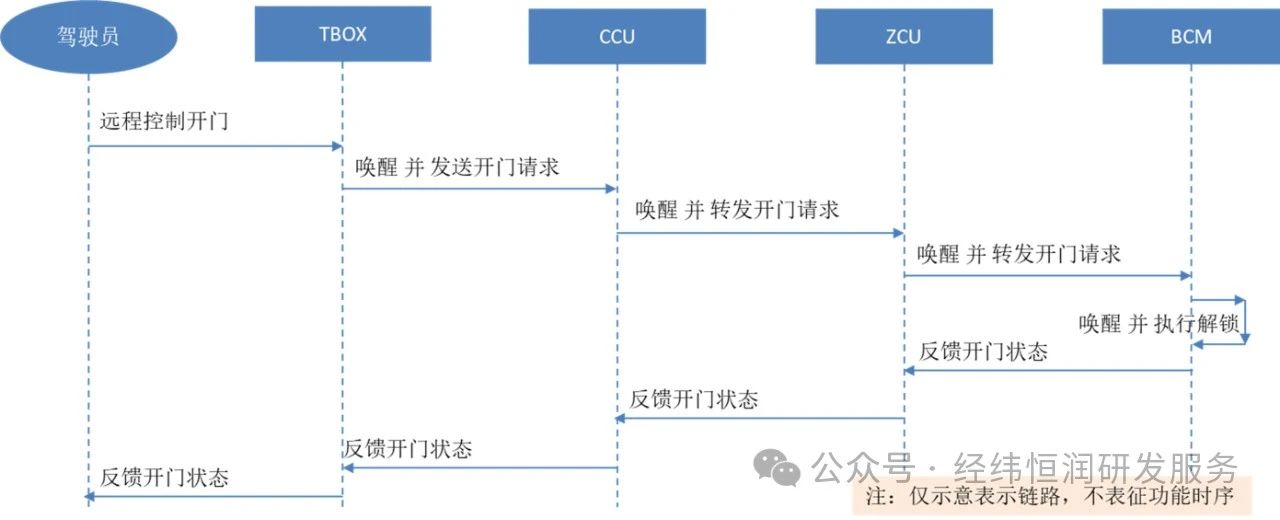
根據(jù)確定的功能場(chǎng)景及PN開發(fā)基礎(chǔ)原則及整車所有的子系統(tǒng)功能規(guī)范輸入,梳理場(chǎng)景觸發(fā)后的完整功能鏈路,這其中要切實(shí)考慮鏈路中涉及到的ECU、關(guān)鍵信號(hào)值的變化、功能執(zhí)行前提條件、存儲(chǔ)值/實(shí)時(shí)值需求、以太網(wǎng)接口調(diào)用需求、供電需求、網(wǎng)段需求等關(guān)鍵信息,通過細(xì)致的方案設(shè)計(jì)來避免場(chǎng)景上的鏈路缺失和場(chǎng)景間的關(guān)聯(lián);另外還需要考慮休眠釋放條件,防止場(chǎng)景的休眠異常。
- 第四步:網(wǎng)絡(luò)線的所有工作
在功能線開發(fā)的同時(shí),網(wǎng)絡(luò)線可同步開發(fā)相關(guān)的PN需求規(guī)范及休眠喚醒策略;在制定好PN場(chǎng)景后,可以開始NMPDU的制定、車型網(wǎng)絡(luò)相關(guān)方案的制定;PN的通信設(shè)計(jì)和診斷設(shè)計(jì)應(yīng)結(jié)合PN開發(fā)的基礎(chǔ)原則及網(wǎng)絡(luò)需求規(guī)范開展,比如通信設(shè)計(jì)是否要考慮應(yīng)用報(bào)文與場(chǎng)景的關(guān)聯(lián)、診斷設(shè)計(jì)是否要考慮全工況下的DTC記錄等。
- 第五步:功能及網(wǎng)絡(luò)的測(cè)試驗(yàn)證
結(jié)合上述開發(fā)的輸入,開展測(cè)試工作以驗(yàn)證符合性。
以上的每個(gè)步驟都需要形成相關(guān)的輸入輸出來保證整個(gè)方案體系的一致性,如相關(guān)模板、PN開發(fā)基礎(chǔ)原則、場(chǎng)景功能鏈路方案、控制器PN方案、網(wǎng)絡(luò)需求規(guī)范、休眠喚醒條件、測(cè)試規(guī)范/用例、測(cè)試腳本等等。此外,控制器的實(shí)現(xiàn)如基于AUTOSAR CP協(xié)議棧,需要同步考慮功能需求與BSW的Mapping關(guān)系,保證功能需求的落地可行性。
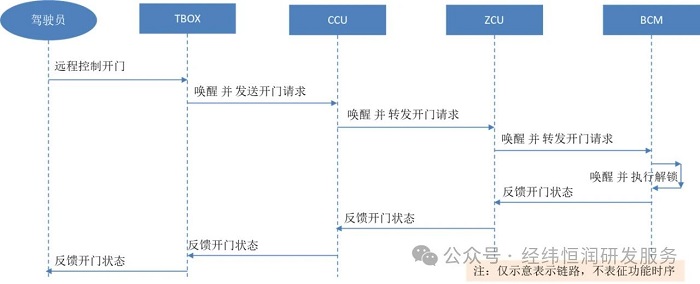
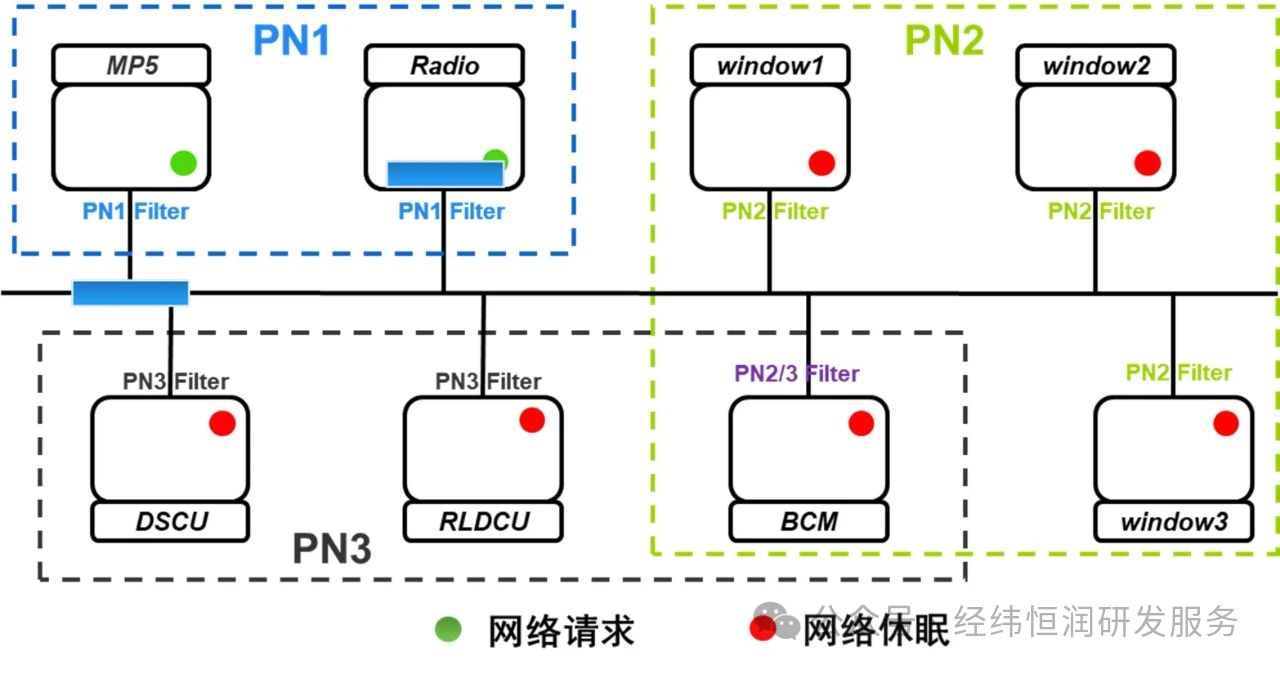
下圖即為同一個(gè)網(wǎng)段下不同控制器的喚醒示意。當(dāng)某PN場(chǎng)景觸發(fā)后,控制器置位相關(guān)的PN信息,其他控制器根據(jù)置位的PN信息來決定是否與自身相關(guān),如相關(guān)則喚醒以支撐功能實(shí)現(xiàn),如不相關(guān)則維持在低功耗狀態(tài)。
注:本文集中在CAN總線的局部網(wǎng)絡(luò)管理。
- 硬件支持
實(shí)現(xiàn)PN的控制器應(yīng)結(jié)合實(shí)際方案決定是否需要在硬件層面支持報(bào)文過濾功能,常見的支持硬件過濾功能的CAN收發(fā)器為NXP TJA1145,其在硬件層面設(shè)計(jì)了符合ISO 11898-2中Selective Wake-up的特性,可過濾自身關(guān)心的報(bào)文。通過使用此類收發(fā)器,可以達(dá)成控制器的功耗控制,否則無(wú)法實(shí)現(xiàn)功耗上的按需控制。
- 軟件支持
PN功能的實(shí)現(xiàn),使用AUTOSAR CP協(xié)議棧是非常方便的,與常規(guī)的NM相比,PN軟件模塊主要集中在BSW的ComM和CanNM中,ComM負(fù)責(zé)PNC狀態(tài)機(jī)的監(jiān)控及跳轉(zhuǎn),CanNM配合ComM負(fù)責(zé)NMPDU和CAN通道的維持和釋放,基于AUTOSAR軟件配置工具可以快速切換為支持PN。如使用手寫代碼,鑒于PN狀態(tài)機(jī)的規(guī)則相對(duì)簡(jiǎn)單易懂,也可以方便的實(shí)現(xiàn)此類功能。
經(jīng)緯恒潤(rùn)依托自身豐富的技術(shù)積淀,結(jié)合架構(gòu)開發(fā)、總線開發(fā)、嵌入式開發(fā)等綜合經(jīng)驗(yàn),對(duì)整車功能進(jìn)行分析與梳理,形成了一套邏輯嚴(yán)密、場(chǎng)景適應(yīng)性強(qiáng)的從場(chǎng)景-功能-控制器-自動(dòng)化測(cè)試系統(tǒng)的綜合解決方案框架。該方案包含了對(duì)市場(chǎng)需求的深刻理解,已應(yīng)用于多家OEM的實(shí)際車型開發(fā)中。
基于此綜合解決方案,針對(duì)OEM不同車型的獨(dú)特性、現(xiàn)有功能配置及軟硬件實(shí)際情況,細(xì)心規(guī)劃并執(zhí)行定制化實(shí)施方案,贏得了合作伙伴的廣泛信賴與深度認(rèn)可。
-
操作系統(tǒng)
+關(guān)注
關(guān)注
37文章
6825瀏覽量
123332 -
網(wǎng)絡(luò)管理
+關(guān)注
關(guān)注
0文章
120瀏覽量
27673 -
AUTOSAR
+關(guān)注
關(guān)注
10文章
362瀏覽量
21585 -
整車
+關(guān)注
關(guān)注
0文章
16瀏覽量
6854
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
光庭信息榮獲AUTOSAR中國(guó)中心2024年度特別貢獻(xiàn)獎(jiǎng)
AUTOSAR通信對(duì)自動(dòng)駕駛的影響 AUTOSAR通信與嵌入式系統(tǒng)設(shè)計(jì)
AUTOSAR通信與網(wǎng)絡(luò)安全 AUTOSAR通信在車輛中的應(yīng)用
AUTOSAR中通信堆棧的配置 AUTOSAR通信模塊測(cè)試方法
AUTOSAR通信框架的優(yōu)勢(shì) AUTOSAR通信實(shí)例與應(yīng)用場(chǎng)景
AUTOSAR通信與CAN協(xié)議的關(guān)系
AUTOSAR通信組件介紹 AUTOSAR通信層功能分析
AUTOSAR通信協(xié)議解析 如何實(shí)現(xiàn)AUTOSAR通信
醫(yī)院節(jié)能用電管理策略與能源綜合管理平臺(tái)應(yīng)用
醫(yī)院節(jié)能用電管理研究
節(jié)能回饋式負(fù)載技術(shù)創(chuàng)新與發(fā)展
首款支持AUTOSAR車規(guī)MCU亮相AUTOSAR中國(guó)日

CET中電技術(shù)助力上海建橋?qū)W院打造綠色低碳校園

企業(yè)節(jié)能管理系統(tǒng) 能耗分析系統(tǒng)
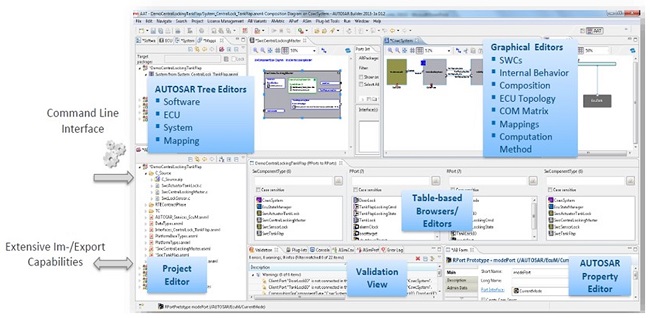
AUTOSAR Builder—符合AUTOSAR(CPAP)的嵌入式系統(tǒng)設(shè)計(jì)工具





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論