") G-PAL新一代行泊一體系統(tǒng):以卓越“智價(jià)比”重新定義全天候高階智駕
G-PAL新一代行泊一體系統(tǒng):以卓越“智價(jià)比”重新定義全天候高階智駕
當(dāng)前,高階智駕的供需關(guān)系尚未達(dá)到平衡點(diǎn)。
隨著智能駕駛功能的不斷成熟、消費(fèi)者接受度提升、成本降低,L2已經(jīng)成為主要的駕駛輔助方案。據(jù)蓋世汽車研究院統(tǒng)計(jì),2024年1-3月新能源乘用車市場(chǎng)L2級(jí)別(含L2、L2+、L2++)市場(chǎng)滲透率已超過53%。其中,20萬以上價(jià)格區(qū)間車型L2滲透率均已經(jīng)超過89%以上。未來10萬以下車型也將迎來ADAS的增長。
與此同時(shí),以城市NOA為代表的高階智駕功能加速落地。隨著城市NOA需求的爆發(fā),行泊分體的硬件設(shè)計(jì)將逐步退出市場(chǎng),更具性價(jià)比的行泊一體方案會(huì)成為主流。
在智駕滲透率持續(xù)提升的趨勢(shì)下,兼顧“成本可控”和“功能好用”的智駕系統(tǒng),才是真正值得擁有的高階智駕。
作為一家硬科技企業(yè),幾何伙伴(G-PAL)在推動(dòng)智駕平權(quán)中給出了“解題之法”:基于軟硬件一體的解決方案能力,并通過“菜單式交付”的模式,為主機(jī)廠和用戶帶來極具智價(jià)比的高階智駕產(chǎn)品。
除了通過視覺+4D毫米波成像雷達(dá)(以下簡稱為“4D成像雷達(dá)”)融合的技術(shù)路線顯著降低感知系統(tǒng)成本,幾何伙伴還提出了“輕量化分段式端到端”理念并將其成功落地——借助高效的輕量化模型架構(gòu)和算力優(yōu)化方案,將端到端架構(gòu)部署至中算力SoC上,為高階智駕的量產(chǎn)應(yīng)用探索出了一條新路徑。
在智能駕駛技術(shù)日新月異的今天,幾何伙伴憑借其自主研發(fā)的行泊一體解決方案,正引領(lǐng)著行業(yè)向更高效、更智能的方向發(fā)展。
G-PAL行泊一體智駕解決方案:性能安全與成本平衡的更優(yōu)解
智能網(wǎng)聯(lián)汽車的智駕安全問題一直是行業(yè)熱議的話題。對(duì)用戶而言,真正安全的智駕,就是要能夠保證在復(fù)雜路況、極端天氣下,車輛能夠有足夠的反應(yīng)識(shí)別能力和控制響應(yīng)能力。
而G-PAL行泊一體解決方案能夠?qū)崿F(xiàn)高階智能駕駛的全天時(shí)、全天候運(yùn)行,其核心便在于獨(dú)特的視覺+4D成像雷達(dá)融合感知系統(tǒng)。其中,視覺傳感器提供豐富的紋理和顏色信息,而幾何伙伴自研的高分辨率4D成像雷達(dá)則擁有出色的測(cè)距測(cè)速能力和對(duì)弱光、惡劣天氣環(huán)境的適應(yīng)性,兩者相輔相成,共同構(gòu)建了高精度、高魯棒性的環(huán)境感知模塊——這種融合感知技術(shù)大幅提升了系統(tǒng)對(duì)復(fù)雜場(chǎng)景的識(shí)別能力。
此外,這一種多傳感器融合技術(shù)也為行泊一體復(fù)用軟硬件提供了有力支撐。在泊車時(shí),360°“視覺+4D成像雷達(dá)”融合感知系統(tǒng)實(shí)現(xiàn)了對(duì)車身周圍無盲區(qū)的感知區(qū)域覆蓋,因而能夠無縫替代傳統(tǒng)的超聲波雷達(dá),打造環(huán)境適應(yīng)性更強(qiáng)、性價(jià)比更高的記憶泊車、自主代客泊車等高階智駕功能。
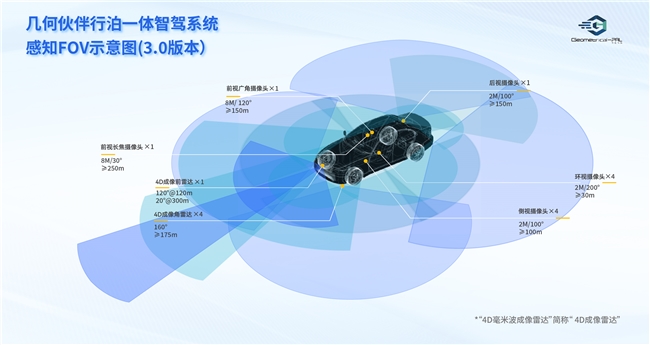
▲幾何伙伴行泊一體智駕系統(tǒng)感知FOV示意圖(3.0版本)
這套方案不僅代表著幾何伙伴在智能駕駛領(lǐng)域的深厚積累,更是對(duì)“智價(jià)比”這一概念的生動(dòng)詮釋——即基于先進(jìn)的智能化技術(shù),以“人有我優(yōu)”的方式,實(shí)現(xiàn)產(chǎn)品力與價(jià)格的高比值,為用戶帶來超越期待的駕駛體驗(yàn)。
相較于市場(chǎng)上其他產(chǎn)品,G-PAL行泊一體解決方案在性能與成本上展現(xiàn)出卓越的“智價(jià)比”優(yōu)勢(shì),這也是國內(nèi)首款能夠?qū)崿F(xiàn)全天時(shí)全天候城市場(chǎng)景應(yīng)用的輕圖高階智駕方案。
該系列產(chǎn)品根據(jù)硬件配置可劃分為7V5R低算力方案、11V5R中高算力方案和面向未來L3/4自動(dòng)駕駛的高算力方案。
以基于幾何伙伴行泊一體3.0系統(tǒng)架構(gòu)的11V5R中高算力方案為例,這套進(jìn)階版行泊一體解決方案面向L2++高階智駕,以城市NOA為核心功能,基于幾何伙伴自研核心算法、高性能域控制器、11V5R傳感器配置,可安全高效地應(yīng)對(duì)左右轉(zhuǎn)博弈、人車混行、異形障礙物、鬼探頭等復(fù)雜城市通行場(chǎng)景。結(jié)合360°“視覺+4D成像雷達(dá)”融合感知,該系統(tǒng)將智駕應(yīng)用場(chǎng)景的適用性拓展至全天時(shí)、全天候范圍,即便在雨雪霧霾等復(fù)雜天氣下,也能為用戶帶來優(yōu)質(zhì)的駕乘體驗(yàn)。
在3.0系統(tǒng)架構(gòu)的基礎(chǔ)上,幾何伙伴已形成Lite、Pro、Max三個(gè)版本的領(lǐng)航輔助駕駛方案,可分別實(shí)現(xiàn)輕量城區(qū)NOA、進(jìn)階城區(qū)NOA和全場(chǎng)景城市NOA。
幾何伙伴這條技術(shù)路線以多模態(tài)、全天候、低成本、易量產(chǎn)為特色,其核心優(yōu)勢(shì)在于能夠基于合理的算力消耗和高性價(jià)比傳感器配置,實(shí)現(xiàn)L2++級(jí)別的城市NOA、城際NOA、記憶行車、記憶泊車以及代客泊車等一系列功能,而系統(tǒng)成本也更貼近實(shí)際需求,讓用戶在不同級(jí)別的車型中都能體驗(yàn)到絲滑流暢的高階智駕功能。
可見,G-PAL行泊一體智能駕駛解決方案為高階智駕功能的規(guī)模化上車開辟了一條更易落地的技術(shù)路徑。
輕量化分段式端到端:實(shí)現(xiàn)場(chǎng)景理解更精準(zhǔn)、決策更擬人的高階智駕
智能駕駛的性能表現(xiàn)除了受制于傳感器的精度與可靠性,還取決于算法優(yōu)化、算力適配、數(shù)據(jù)質(zhì)量這三大底座。
實(shí)際上,“端到端”的要義并非盲目追逐高算力或堆砌龐大的模型參數(shù)。幾何伙伴深諳此道,秉持著面向量產(chǎn)的實(shí)用主義,基于市場(chǎng)的真實(shí)需求和智駕實(shí)際使用條件的考量,選擇在主流中算力智駕SoC上高效部署端到端架構(gòu),同時(shí)嵌入必要的安全冗余設(shè)計(jì),旨在為消費(fèi)者帶來超越預(yù)期的智駕使用體驗(yàn),加速智駕能力的迭代進(jìn)化。
因此,在過去幾年中,幾何伙伴除了不斷挖掘硬件的潛力,還通過先進(jìn)的算法架構(gòu)和軟件優(yōu)化能力,開發(fā)出一套通用感知端到端、預(yù)測(cè)決策一體化框架。
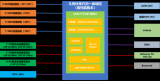
這套算法架構(gòu)把原本基于多個(gè)神經(jīng)網(wǎng)絡(luò)模型的感知任務(wù),收攏到一張全面互聯(lián)的感知網(wǎng)絡(luò)上,極大提升了信息的整合效率和處理的協(xié)同性;同時(shí),預(yù)測(cè)和決策也得以無縫銜接,加之可解釋性規(guī)劃控制,便形成了一張認(rèn)知網(wǎng)絡(luò)。通過前后兩張網(wǎng)完成所有駕駛?cè)蝿?wù),這就是分段式端到端。

▲幾何伙伴行泊一體智駕系統(tǒng)方案算法架構(gòu)
●通用感知網(wǎng)絡(luò)GGPNet(GGPNet,全稱G-PAL General Perception Net)
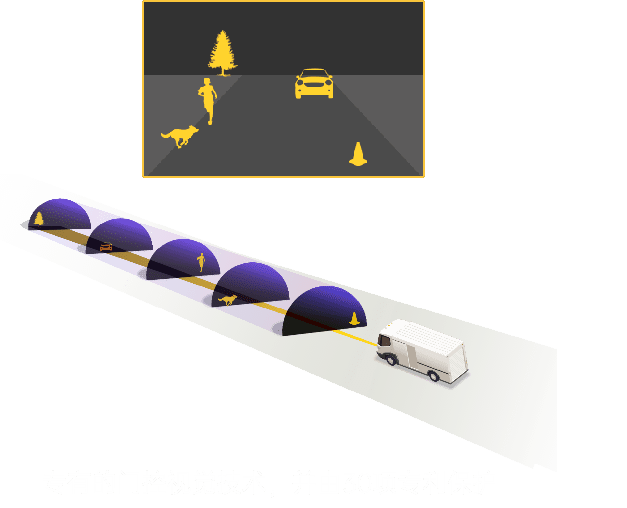
在感知階段,視覺攝像頭和4D成像雷達(dá)的數(shù)據(jù)通過深度學(xué)習(xí)模型進(jìn)行融合。這種融合并非是在特征層面上進(jìn)行簡單疊加,而是通過神經(jīng)網(wǎng)絡(luò)中的特定融合模塊,深度提取和整合來自視覺攝像頭的高分辨率圖像信息與4D成像雷達(dá)提供的點(diǎn)云、方位角、俯仰角、深度和速度信息,實(shí)現(xiàn)了數(shù)據(jù)特征的深度交融。
通用感知網(wǎng)絡(luò)GGPNet通過Transformer架構(gòu)中的交叉注意力機(jī)制,能夠有效處理視覺和4D成像雷達(dá)數(shù)據(jù)之間的復(fù)雜關(guān)系,尤其是能夠融合對(duì)小型目標(biāo)或部分遮擋目標(biāo)的感知能力,以及捕捉到更細(xì)膩的物體表面特征,使得感知系統(tǒng)可以在復(fù)雜環(huán)境下更精準(zhǔn)地進(jìn)行目標(biāo)檢測(cè)、分類和追蹤。
幾何伙伴GGPNet是國內(nèi)首個(gè)可在量產(chǎn)計(jì)算平臺(tái)上實(shí)現(xiàn)視覺+4D成像雷達(dá)多模態(tài)異構(gòu)特征融合的感知模型,以一張神經(jīng)網(wǎng)絡(luò)即可實(shí)現(xiàn)4D成像雷達(dá)與相機(jī)聯(lián)合輸出多任務(wù)結(jié)果,形成動(dòng)、靜態(tài)環(huán)境感知多任務(wù)合一。相較于傳統(tǒng)方案,GGPNet能顯著增強(qiáng)多個(gè)感知任務(wù)之間的一致性,確保了系統(tǒng)整體性能的提升,同時(shí)能夠有效降低算力資源的消耗。
具體而言,GGPNet能夠執(zhí)行包括全域通用障礙物檢測(cè)、在線建圖以及交通標(biāo)志識(shí)別等在內(nèi)的多任務(wù)處理,全面提升了系統(tǒng)對(duì)周圍環(huán)境的準(zhǔn)確識(shí)別與理解能力,為下游的預(yù)測(cè)決策提供了堅(jiān)實(shí)的感知基礎(chǔ),從而讓系統(tǒng)得以從容應(yīng)對(duì)異形障礙物、鬼探頭、加塞并線等復(fù)雜場(chǎng)景。
●預(yù)測(cè)決策網(wǎng)絡(luò)GPDNet(GPDNet,全稱G-PAL Prediction Decision Net)
幾何伙伴預(yù)測(cè)決策網(wǎng)絡(luò)GPDNet可以讓車輛的各場(chǎng)景應(yīng)對(duì)表現(xiàn)更為智能,駕駛軌跡與速度規(guī)劃更擬人化,在復(fù)雜場(chǎng)景中的通行也會(huì)更加順暢。
GPDNet創(chuàng)新性地將預(yù)測(cè)過程和決策過程整合在一個(gè)網(wǎng)絡(luò)模型內(nèi),旨在消除常見的智駕方案中預(yù)測(cè)與決策解耦導(dǎo)致的信息損失與交互缺失。幾何伙伴使用同一個(gè)模型輸出車輛未來狀態(tài)序列(決策)及推演環(huán)境中其他交通參與者的未來狀態(tài)序列(預(yù)測(cè)),并通過注意力機(jī)制,使預(yù)測(cè)決策模型的交互博弈能力更強(qiáng),有效化解傳統(tǒng)預(yù)測(cè)-決策解耦方案存在的諸如響應(yīng)延遲、前后頓挫等弊端。這一設(shè)計(jì)顯著提升了智駕系統(tǒng)的擬人化表現(xiàn),大幅提高了通行效率。
此外,可解釋性規(guī)劃控制過程也有力確保了該方案的可落地性,它以大模型輸出的多智能體聯(lián)合策略輸出為參考,輸出可解釋的控制指令,從而確保必要的安全性和合理性。
值得一提的是,幾何伙伴GPDNet是業(yè)內(nèi)首個(gè)引入4D成像雷達(dá)感知結(jié)果的預(yù)測(cè)決策端到端方案,在兼顧系統(tǒng)量產(chǎn)性的同時(shí),也減少了感知-規(guī)控的信息損失,進(jìn)一步提升了分段式端到端方案的性能天花板。
多模態(tài)異構(gòu)信息融合與分段式端到端架構(gòu)的結(jié)合,既確保了高計(jì)算效率和低延遲,讓系統(tǒng)在毫秒級(jí)別內(nèi)完成感知-決策-執(zhí)行的閉環(huán)處理;同時(shí)也讓系統(tǒng)的決策規(guī)劃能力整體增強(qiáng),不僅能夠“預(yù)測(cè)”,還能執(zhí)行更為精準(zhǔn)的“預(yù)判”。此外,這套系統(tǒng)還配備了從硬件到底軟再到算法的安全降級(jí)策略,嚴(yán)守安全底線。
在先進(jìn)的感知系統(tǒng)、數(shù)據(jù)驅(qū)動(dòng)和安全機(jī)制支持下,用戶可以通過G-PAL新一代行泊一體智能駕駛系統(tǒng)盡享全天候安全智駕。
數(shù)據(jù)驅(qū)動(dòng)算法迭代,打造越用越聰明的智駕系統(tǒng)
端到端無疑將加速全場(chǎng)景NOA的規(guī)模化落地。在此過程中,高質(zhì)量、多樣化的數(shù)據(jù)積累與分析將是增強(qiáng)端到端場(chǎng)景泛化能力、提升性能體驗(yàn)的關(guān)鍵驅(qū)動(dòng)力。
對(duì)此,幾何伙伴構(gòu)建起超千萬幀專業(yè)級(jí)“4D毫米波成像點(diǎn)云+視覺圖像”的多模態(tài)數(shù)據(jù)集。其原始數(shù)據(jù)里程超10萬公里,全天時(shí)全天候的數(shù)據(jù)積累涵蓋城區(qū)、快速道路及高速公路等近千個(gè)場(chǎng)景。
這套數(shù)據(jù)閉環(huán)彌補(bǔ)了當(dāng)前業(yè)內(nèi)此類數(shù)據(jù)集的空缺,并打通從數(shù)據(jù)采集到模型部署的閉環(huán)鏈路,打造出高效智能化數(shù)據(jù)閉環(huán)系統(tǒng),有力支撐算法的快速迭代和場(chǎng)景泛化。

▲幾何伙伴數(shù)據(jù)平臺(tái)
幾何伙伴還建立了智算中心,同時(shí)提出基于算力約束和需求驅(qū)動(dòng)的模型分布式訓(xùn)練方法。這種方式能夠迅速對(duì)采集數(shù)據(jù)進(jìn)行4D場(chǎng)景目標(biāo)的精準(zhǔn)自動(dòng)化標(biāo)注,與傳統(tǒng)訓(xùn)練方法相比,效率顯著提升。結(jié)合云端高并發(fā)、大算力、易擴(kuò)展的優(yōu)勢(shì),將進(jìn)一步加速高階智駕感知、決策、規(guī)劃和控制等算法的閉環(huán)迭代進(jìn)程。
在數(shù)據(jù)驅(qū)動(dòng)的迭代模式下,G-PAL行泊一體智能駕駛系統(tǒng)經(jīng)過車端駕駛數(shù)據(jù)的打磨,將會(huì)愈發(fā)貼合用戶的駕駛習(xí)慣,從而越開越好用、越用越聰明。
高性能行泊一體域控制器:高集成、易拓展設(shè)計(jì)滿足多樣化需求
如前文所述,ADAS和部分L2+功能正在向經(jīng)濟(jì)型車型滲透,這部分車型的智駕訴求表現(xiàn)為:以更低成本滿足用戶對(duì)更多城市智駕體驗(yàn)的期待。
對(duì)此,G-PAL新一代行泊一體解決方案致力于通過極具性價(jià)比的軟硬件方案以及更合理的算力配置,來滿足主機(jī)廠和用戶的實(shí)際需求。
幾何伙伴車規(guī)級(jí)行泊一體域控制器采用高性能SoC,能夠處理大量復(fù)雜的計(jì)算任務(wù),如感知、決策和控制算法等。它支持?jǐn)z像頭、4D成像雷達(dá)等多種傳感器數(shù)據(jù)的并行處理和融合,從而確保車輛能夠?qū)χ車h(huán)境進(jìn)行準(zhǔn)確感知并高效處理。該域控制器具備高帶寬的數(shù)據(jù)傳輸能力和實(shí)時(shí)操作系統(tǒng),能夠確保各個(gè)部件之間實(shí)現(xiàn)快速信息交流與實(shí)時(shí)響應(yīng),以從容應(yīng)對(duì)快速變化的交通場(chǎng)景。此外,還結(jié)合了軟硬件安全冗余設(shè)計(jì),確保系統(tǒng)在各種極端條件下的可靠運(yùn)行。
不僅如此,在軟件架構(gòu)上,幾何伙伴域控平臺(tái)搭載的自研中間件符合功能安全和實(shí)時(shí)性要求,能夠?qū)ΤR姷能囕d通訊方式進(jìn)行統(tǒng)一封裝,且通訊模塊支持安全加密,提高系統(tǒng)的安全性和可配置性。
這些軟硬件特性使得幾何伙伴車規(guī)級(jí)行泊一體域控制器能夠基于合理算力配置,處理復(fù)雜的實(shí)時(shí)數(shù)據(jù)和算法,實(shí)現(xiàn)高級(jí)別的自動(dòng)駕駛功能,并在性能和可靠性方面達(dá)到行業(yè)標(biāo)準(zhǔn)。

▲幾何伙伴車規(guī)級(jí)行泊一體域控制器
此外,幾何伙伴行泊一體域控制器的硬件架構(gòu)設(shè)計(jì)還充分考慮了易拓展性。對(duì)于更高價(jià)位的車型以及未來系統(tǒng)的功能迭代,這套行泊一體域控制器可拓展算力至200+TOPS,并支持?jǐn)z像頭、4D毫米波成像雷達(dá)、激光雷達(dá)等多傳感器接入,增強(qiáng)安全冗余,提升城市NOA、城際NOA等L2+功能的舒適體驗(yàn),覆蓋從入門級(jí)到高算力平臺(tái)。同時(shí),該架構(gòu)還提供豐富的總線接口支持,能夠輕松接入車載網(wǎng)絡(luò),實(shí)現(xiàn)與車輛其他系統(tǒng)的無縫集成。
基于傳感器、算法、系統(tǒng)架構(gòu)的協(xié)同創(chuàng)新,幾何伙伴將以一套感知性能可靠、算法扎實(shí)、功能豐富的系統(tǒng),讓智駕產(chǎn)品從“可用、夠用的系統(tǒng)”進(jìn)化為“更聰明的伙伴”。
開箱即用,菜單式交付模式打造全棧可控智駕系統(tǒng)
基于軟硬件高度協(xié)同的能力和戰(zhàn)略布局,幾何伙伴可在智駕系統(tǒng)研發(fā)的多個(gè)環(huán)節(jié)提供技術(shù)解決方案,覆蓋感知-決策-控制全鏈路,并以軟硬件技術(shù)服務(wù)支持的方式深化合作。
這種模式以幾何伙伴強(qiáng)大的系統(tǒng)架構(gòu)能力為基礎(chǔ),支持客戶按需選擇傳感器陣列、域控制器配置并組合定制成最契合自身需求的智駕系統(tǒng)解決方案。如此一來,極大提高了交付的靈活性和效率,同時(shí)有效縮短了產(chǎn)品研發(fā)周期并降低成本。
為實(shí)現(xiàn)“菜單式交付”,幾何伙伴實(shí)施了模塊化設(shè)計(jì)、標(biāo)準(zhǔn)化接口協(xié)議及云端管理平臺(tái)等一系列技術(shù)創(chuàng)新舉措,確保模塊間無縫集成與高度協(xié)同;此外,還提供HIL、SIL測(cè)試部署工具鏈,可進(jìn)一步提高交付效率與質(zhì)量。
當(dāng)前G-PAL行泊一體解決方案已然能夠做到“開箱即用”。其中的核心模塊“視覺+4D成像雷達(dá)”可作為L2+至L4級(jí)智駕在極端情況下的托底感知系統(tǒng),為系統(tǒng)架構(gòu)設(shè)計(jì)提供了一種成本效益更高、全天候性能更優(yōu)、感知精度更準(zhǔn)確、泛化能力更強(qiáng)、更易于維護(hù)和升級(jí)的智駕解決方案。
得益于從研發(fā)到量產(chǎn)的全棧可控能力,目前幾何伙伴在系統(tǒng)級(jí)解決方案上已經(jīng)與多家主機(jī)廠客戶展開深度合作。其中,國內(nèi)多家頭部主機(jī)廠客戶已完成POC驗(yàn)證,2025年將實(shí)現(xiàn)該方案的量產(chǎn)落地。
智行四海展宏圖,行泊一體辟新路。從G-PAL行泊一體解決方案2.0到3.0的成功落地,再一次有力彰顯了幾何伙伴的軟硬實(shí)力。下一步,幾何伙伴必將全力以赴,以堅(jiān)定的步伐加快行泊一體智駕系統(tǒng)從中高端到經(jīng)濟(jì)型車型的全面覆蓋,圍繞更好地平衡性能與成本這一目標(biāo),持續(xù)打造消費(fèi)者真正關(guān)注、愿意買單的智能駕駛功能,踐行智駕平權(quán)的使命,引領(lǐng)智能駕駛新時(shí)代的蓬勃發(fā)展。
審核編輯 黃宇
-
雷達(dá)
+關(guān)注
關(guān)注
50文章
2936瀏覽量
117529 -
智能駕駛
+關(guān)注
關(guān)注
3文章
2520瀏覽量
48760 -
毫米波成像
+關(guān)注
關(guān)注
0文章
3瀏覽量
2539
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
一體化自動(dòng)氣象監(jiān)測(cè)系統(tǒng):全天候守護(hù),24小時(shí)不間斷監(jiān)測(cè)

地質(zhì)災(zāi)害監(jiān)測(cè)預(yù)警解決方案:準(zhǔn)確守護(hù),全天候護(hù)航
軟硬一體釋放極致影像力,vivo X200系列重新定義影像旗艦

綠色建筑的守護(hù)者:能耗管理系統(tǒng)的全天候監(jiān)測(cè)力量
全天候光伏電站無人機(jī)巡檢系統(tǒng)

AMD與中科創(chuàng)達(dá)成戰(zhàn)略合作,共同打造新一代艙泊一體數(shù)字座艙平臺(tái)
宏景智駕聯(lián)合芯擎科技打造的“艙泊一體”方案完成實(shí)車驗(yàn)證
經(jīng)緯恒潤全新第二代行泊一體域控制器成功量產(chǎn)

晶科能源打造阿聯(lián)酋綠色空調(diào)標(biāo)桿:全天候離網(wǎng)系統(tǒng)
雷(4D成像)視融合:具備全天候全天時(shí)能力的新選擇
vivo WATCH GT智能手表明日發(fā)布,具備全天候健康監(jiān)測(cè)與電競(jìng)限量版
思特威與主控SoC廠商推出黑光全彩全天候錄制解決方案
行泊一體技術(shù)迎來市場(chǎng)爆發(fā)期,AK2車載超聲波傳感器需求增長

三星電機(jī)推出全天候車規(guī)攝像頭模組,具備防水涂層與加熱功能
友思特新品 | 世界上第一個(gè)夜間和全天候攝像的汽車門控視覺系統(tǒng)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論