

串行外設(shè)接口(SPI)是一種廣泛使用的同步串行通信接口,在嵌入式系統(tǒng)中扮演著重要角色。本文將深入探討如何在NXP MCXA153 MCU上實現(xiàn)和優(yōu)化RT-Thread的SPI驅(qū)動,同時介紹NXP提供的相關(guān)開發(fā)工具和技術(shù)。
SPI簡介
SPI由摩托羅拉公司開發(fā),是一種全雙工同步串行總線,主要由四個信號線組成:
CS (Chip Select):片選信號
SCLK (Serial Clock):時鐘信號
MOSI (Master Out Slave In):主設(shè)備輸出,從設(shè)備輸入
MISO (Master In Slave Out):主設(shè)備輸入,從設(shè)備輸出
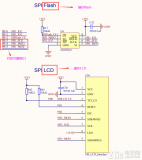
SPI廣泛應(yīng)用于連接各種外設(shè),如TFT LCD顯示器、QSPI Flash存儲器、實時時鐘模塊和慣性測量單元(IMU)等。
NXP MCXA153 SPI特性
NXP MCXA153 MCU集成了兩個低功耗SPI (LPSPI)模塊,具有以下特點:
支持主/從模式
可配置的時鐘極性和相位
8位到32位可編程數(shù)據(jù)幀大小
硬件片選信號控制
支持DMA傳輸
最高傳輸速率可達48Mbps
RT-Thread SPI驅(qū)動移植流程
現(xiàn)在,讓我們詳細介紹如何將RT-Thread的SPI驅(qū)動移植到MCXA153上。
以SPI0為例:
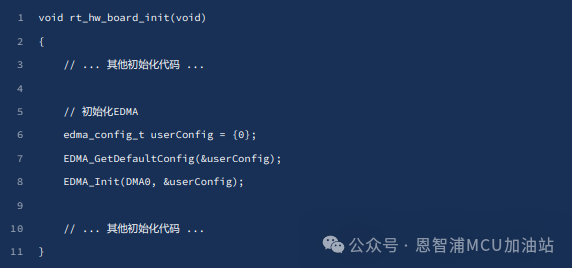
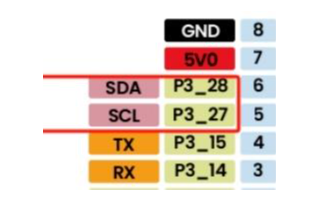
3.1 硬件初始化 首先,我們需要在board初始化代碼中配置SPI0相關(guān)的硬件: 1). 在 rt_hw_board_init 函數(shù)中添加以下代碼:
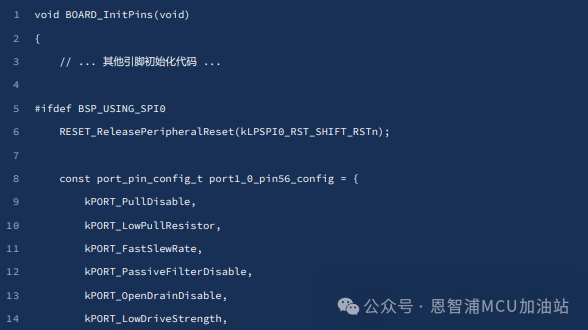
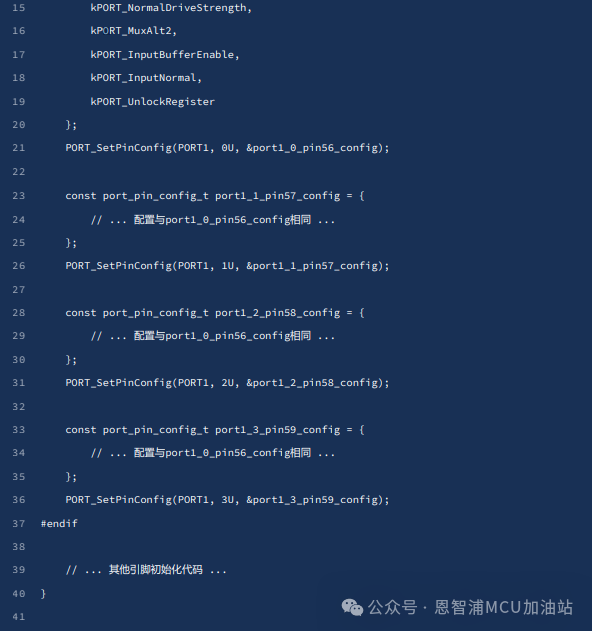
2). 在 BOARD_InitPins 函數(shù)中添加以下代碼:
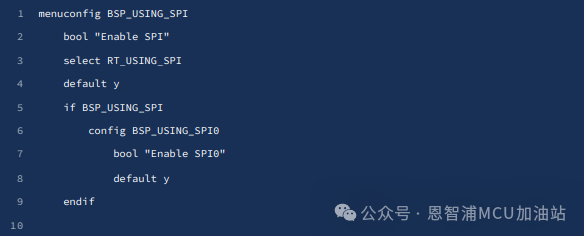
3.2 Kconfig配置
在 board/Kconfig 文件中添加:
3.3 驅(qū)動實現(xiàn)
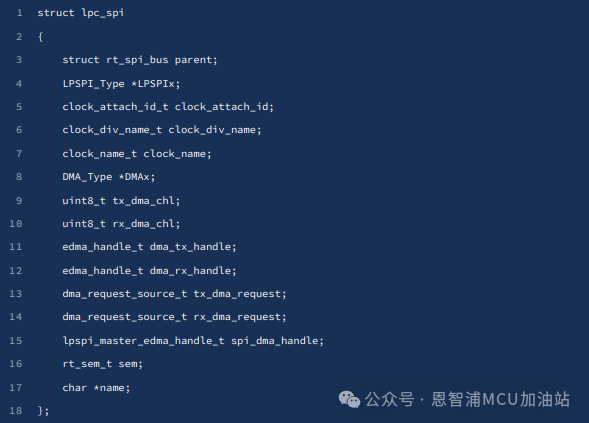
在 drv_spi.c 中實現(xiàn)SPI驅(qū)動的核心功能: 1). 定義SPI設(shè)備結(jié)構(gòu)體:
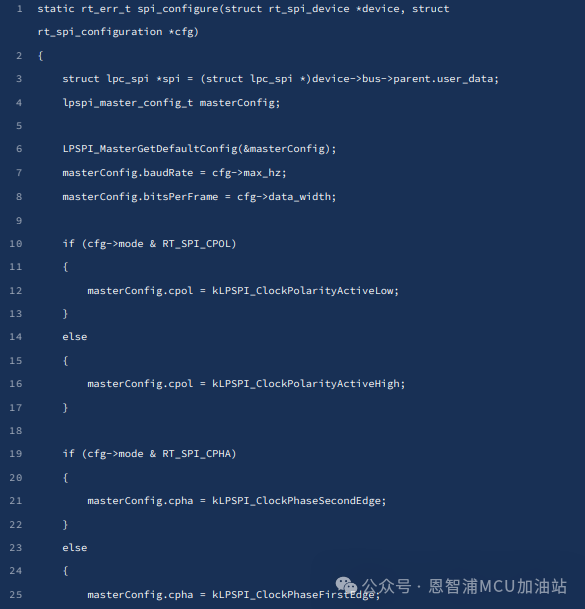
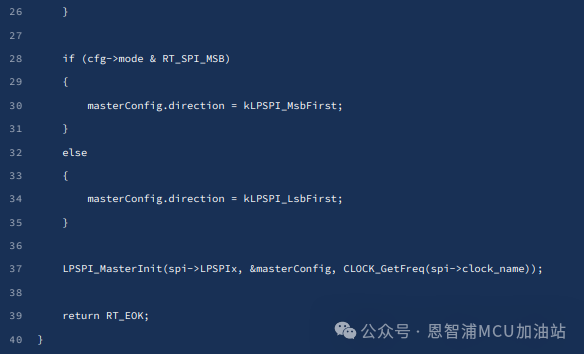
2). 實現(xiàn)SPI配置函數(shù):
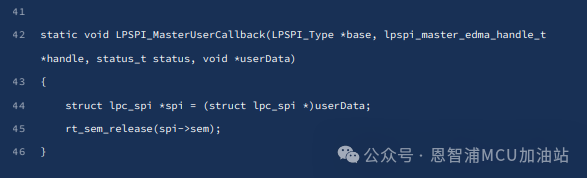
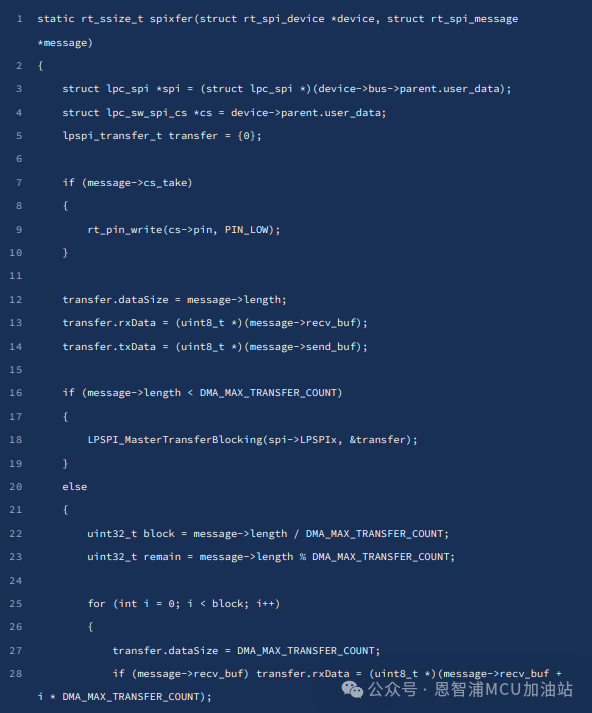
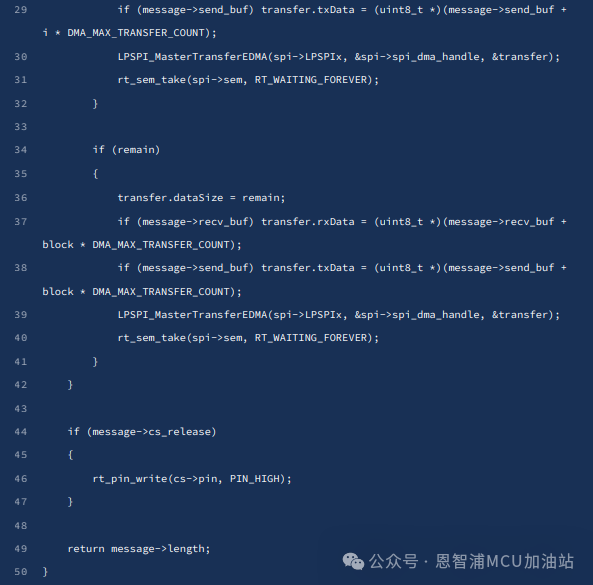
3). 實現(xiàn)數(shù)據(jù)傳輸函數(shù):
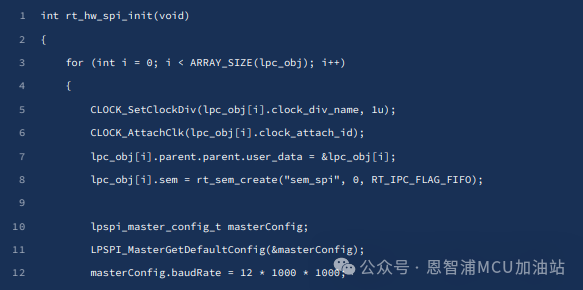
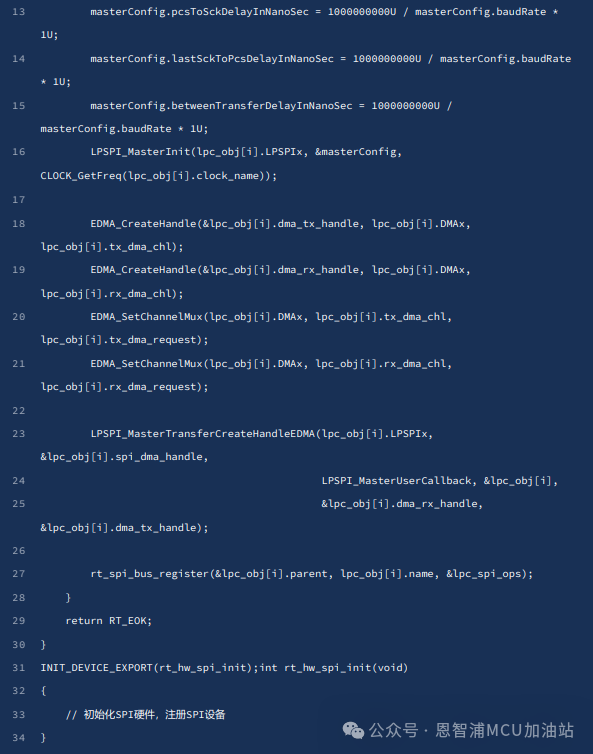
4). 實現(xiàn)SPI初始化函數(shù):
3.4 添加依賴文件 在 Libraries/MCXA153/SConscript 文件中添加:

測試與驗證
為了驗證SPI驅(qū)動的正確性,我們可以進行一個簡單的回環(huán)測試:
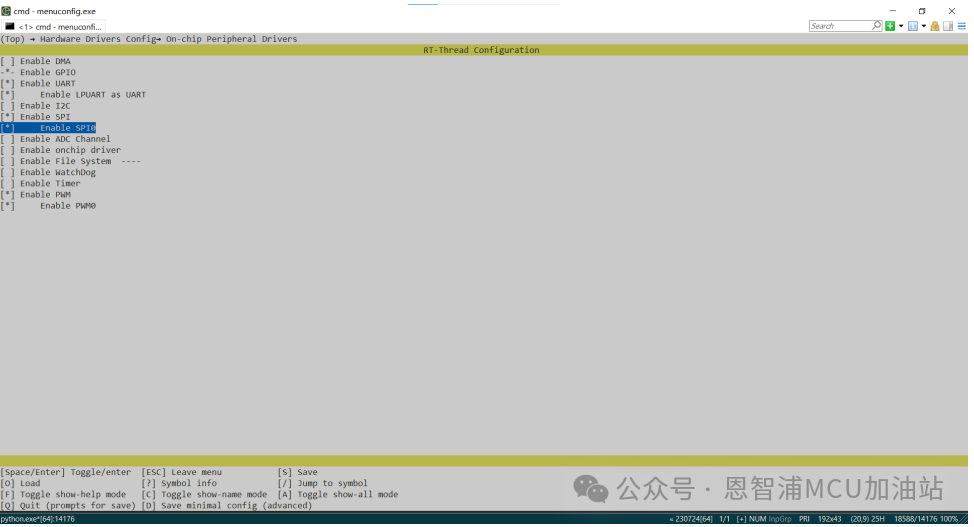
打開menuconfig使能spi0驅(qū)動
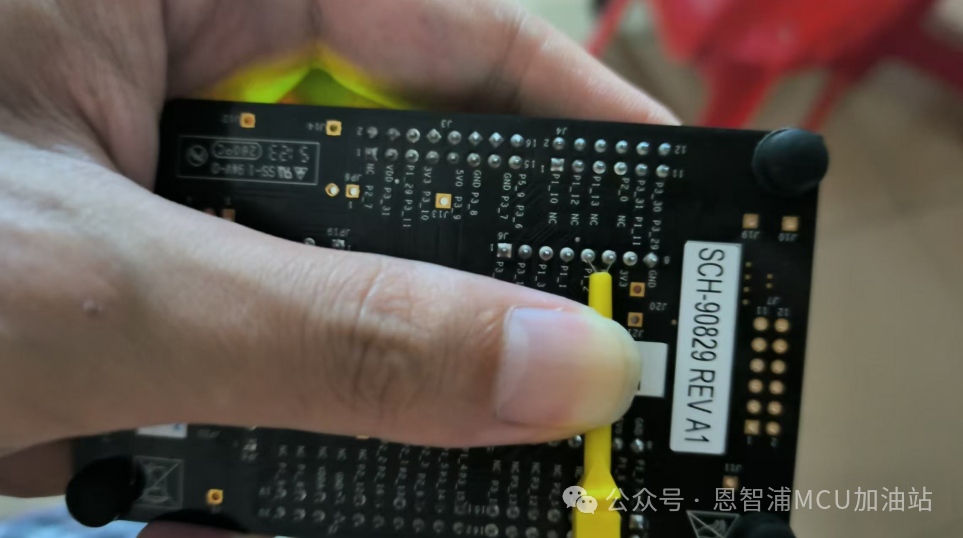
短接MISO和MOSI引腳(P1_0和P1_2)進行自發(fā)自收測試 , 將MOSI (P1_0) 和 MISO (P1_2) 引腳短接:
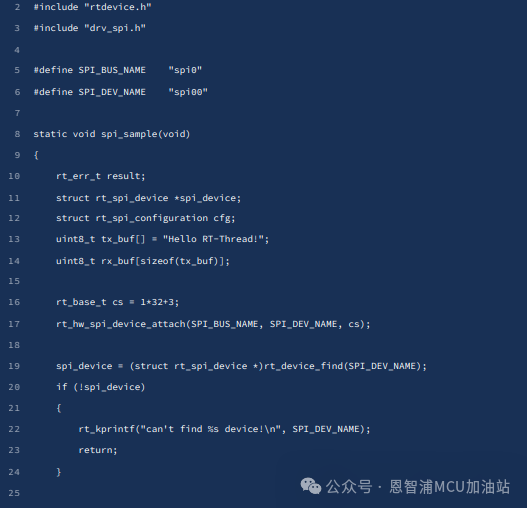
使用以下測試代碼:

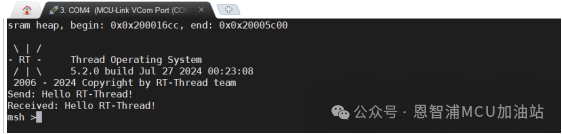
運行結(jié)果:
結(jié)論 通過本文,我們詳細介紹了如何在NXP MCXA153 MCU上實現(xiàn)和優(yōu)化RT-Thread的SPI驅(qū)動。RT-Thread的設(shè)備驅(qū)動框架提供了良好的抽象,使得SPI驅(qū)動的移植變得相對簡單。同時,通過利用MCXA153的硬件特性,如DMA和硬件CS控制,我們可以實現(xiàn)高效的SPI通信。
在實際應(yīng)用中,開發(fā)者應(yīng)根據(jù)具體需求選擇合適的配置和優(yōu)化策略。同時,充分利用NXP提供的工具和文檔資源,可以大大加速開發(fā)進程并提高代碼質(zhì)量。
參考資料
1. RT-Thread官方文檔:
https://www.rt-thread.org/document/site/
2. NXP MCXA153參考手冊
3. MCUXpresso SDK文檔:
https://mcuxpresso.nxp.com/
我們鼓勵開發(fā)者在實踐中不斷探索和優(yōu)化,充分發(fā)揮MCXA153和RT-Thread的潛力!
-
mcu
+關(guān)注
關(guān)注
146文章
17692瀏覽量
357818 -
恩智浦
+關(guān)注
關(guān)注
14文章
5927瀏覽量
111470 -
SPI
+關(guān)注
關(guān)注
17文章
1748瀏覽量
93974 -
RT-Thread
+關(guān)注
關(guān)注
31文章
1347瀏覽量
41353
原文標題:恩智浦FRDM-MCXA153 RT-Thread實踐指南5-SPI
文章出處:【微信號:NXP_SMART_HARDWARE,微信公眾號:恩智浦MCU加油站】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
恩智浦FRDM-MCXA153 RT-Thread開發(fā)實戰(zhàn)(六):I2C總線開發(fā)與應(yīng)用
基于RT-Thread的SPI通訊
RT-Thread編程指南
RT-Thread上SPI的細節(jié)內(nèi)容
RT-Thread全球技術(shù)大會:RT-Thread對POSIX的實現(xiàn)情況介紹
RT-Thread文檔_RT-Thread 潘多拉 STM32L475 上手指南

恩智浦半導(dǎo)體正式加入RT-Thread全球合作伙伴計劃!
RT-Thread成為恩智浦注冊合作伙伴,共同賦能工業(yè)與物聯(lián)網(wǎng)應(yīng)用開發(fā)!
【上海】5月25日-基于恩智浦MCX N系列MCU結(jié)合RT-Thread的應(yīng)用與實踐 線下培訓(xùn)

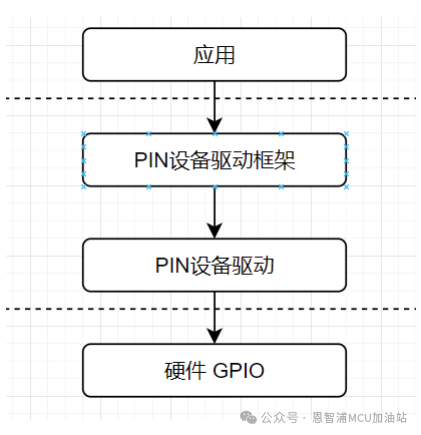
基于恩智浦FRDM-MCXA153開發(fā)板實現(xiàn)RT-Thread的GPIO驅(qū)動
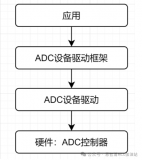
基于恩智浦FRDM-MCXA153開發(fā)板實現(xiàn)RT-Thread的ADC驅(qū)動
免費申請 | FRDM-MCXA156評測活動發(fā)布!





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論