 “亦”真“亦”假?——MXsteerWheel與DYNA4的強強聯手
“亦”真“亦”假?——MXsteerWheel與DYNA4的強強聯手
作者 |Jo
小編 | 不吃豬頭肉
高性能力反饋方向盤MXsteerWheel作為線控轉向開發的新幫手,在北匯信息的展臺上一直是大家關注的焦點。由于它簡練出眾的外表與真實阻尼的手感,吸引參展的朋友都樂此不疲地進行嘗試。而后又不禁感嘆,亦真亦假!

圖1 桌面式駕駛模擬器

系統組成
整體來看,駕駛模擬器由CANoe測試平臺、高性能實時機、方向盤電機與控制中樞,三者構成測試閉環。不過,在系統中,有位“掃地僧”在暗自發力,它就是虛擬車輛仿真軟件(含轉向模型)。其不僅為方向盤提供實時動力學響應,還讓駕駛員可通過動畫來觀測車輛行徑。真實的手感體驗,離不開它,讓我們一探究竟。
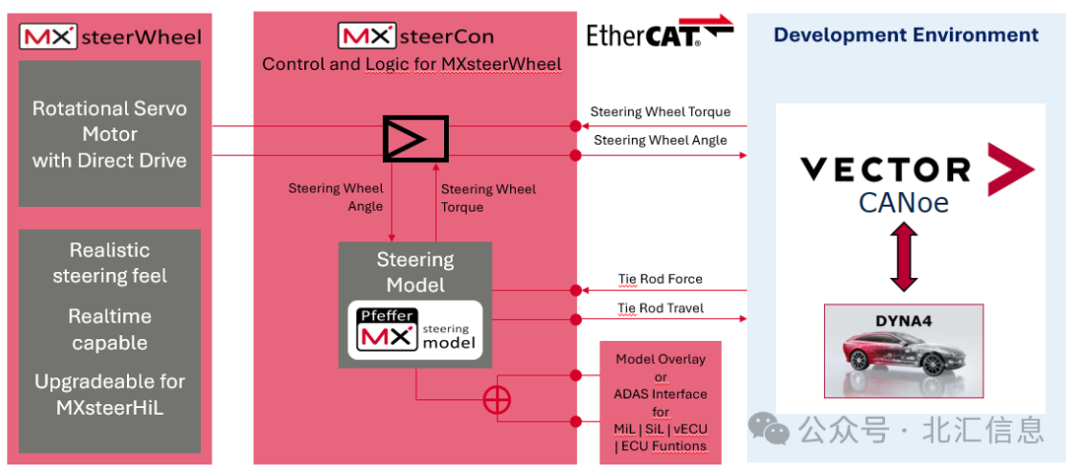
圖2 系統交互概念

MdynamiX轉向模型
MXsteerWheel采集的駕駛員方向盤角度傳輸給控制中樞MXsteerCon,其中包含了由Pfeffer教授團隊開發的轉向模型MXsteering Model。該模型為實時的三自由度模型,常用于EPS和HPS的轉向手感仿真和分析,并支持集成ADAS接口,或自定義ECU功能,如反饋手感算法和車道保持功能。
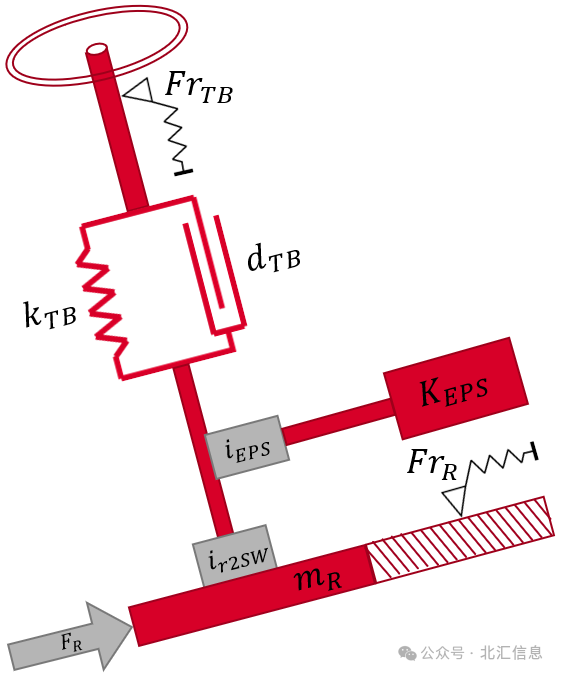
圖3 MXsteering模型
在與DYNA4的集成中,該模型根據轉向角度計算出齒條位移,通過EtherCAT通信協議傳輸給CANoe,在CANoe中以系統變量的形式再發送給DYNA4中。由于DYNA4與CANoe的集成高度簡潔,只需要在DYNA4中關聯上相應的系統變量,一鍵編譯后生成虛擬節點掛載在CANoe中,模型數據便能低時延傳輸,保證實時性。
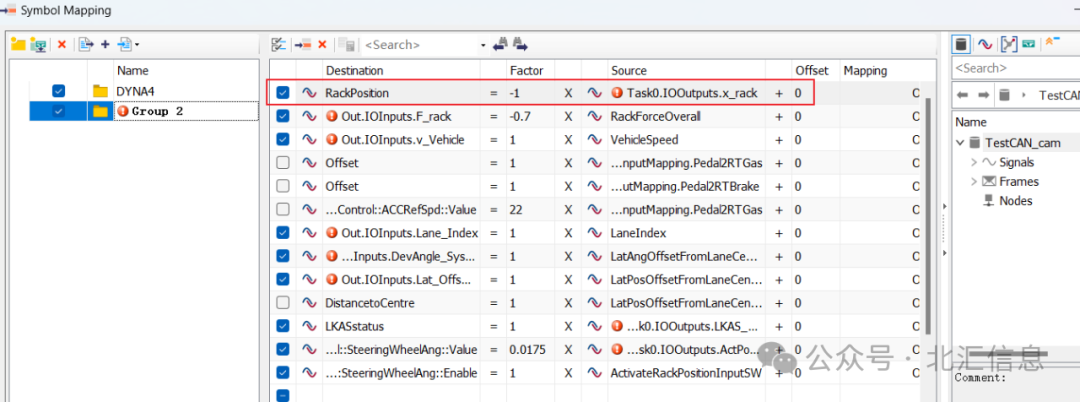
圖4 系統變量關聯
DYNA4也自帶轉向模型,包括轉向柱和帶有靜摩擦模型的轉向傳統裝置,支持齒輪齒條式和搖臂拉桿式兩種不同的機械結構形式,前者常用于乘用車,后期應用于商用車和卡車。
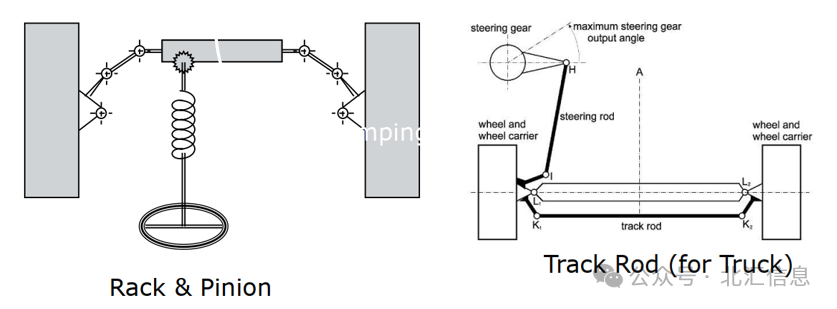
圖5 DYNA4中轉向模型類型

DYNA4車輛動力學模型
DYNA4將接收到的齒條位移再傳輸到自身的多體動力學底盤中,底盤模型結合道路環境、輪胎、動力傳動等綜合信號,計算出最終作用在傳動軸上的負載力,并將此值再回傳給手感方向盤。簡易的信號交互形式,讓工程師非常方便地獲取諸如車身姿態等信息,來進行例如主動回正功能的測試。
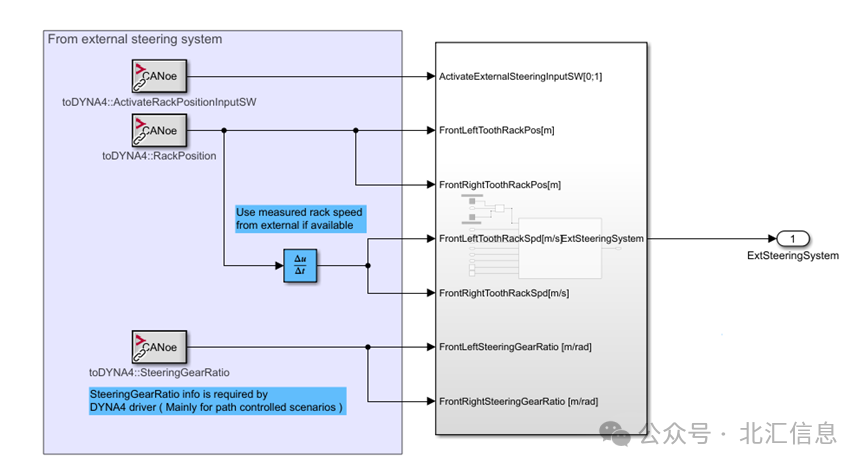
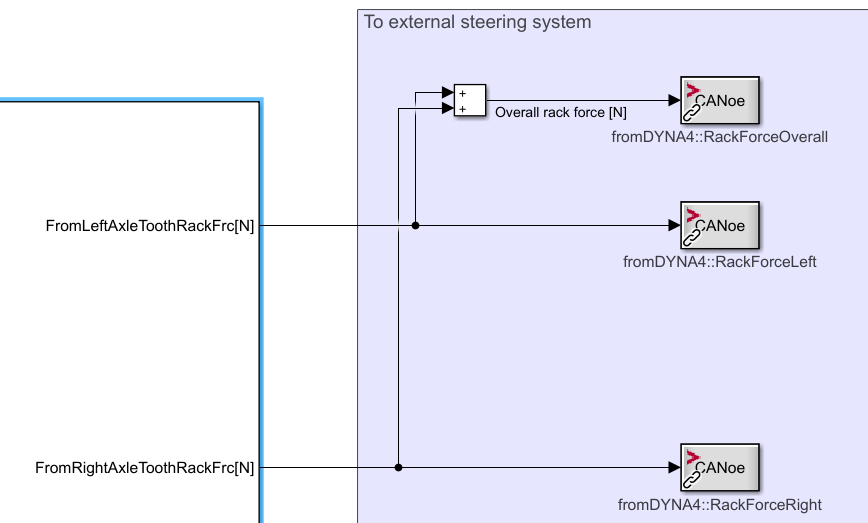
圖6 DYNA4模型與CANoe信號交互
此外,DYNA4與整個轉向總成配合得也非常好。對于常見的EPS測試,亦或是針對傳統或者線控轉向結構,都可以進行SiL、HiL的仿真測試。
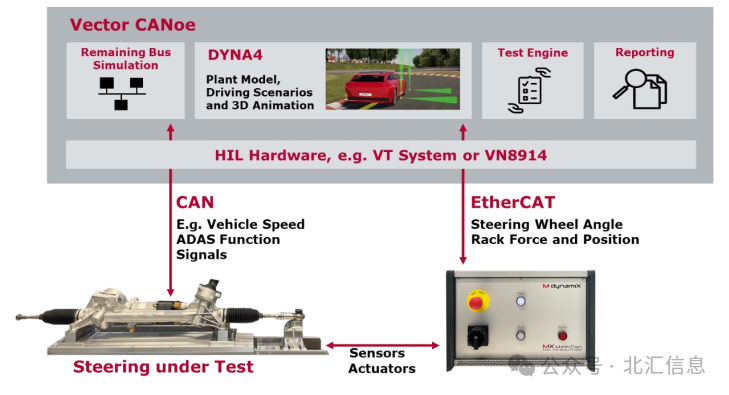
圖7 DYNA4與轉向總成
以乘用車為例,齒輪齒條式轉向系統由一對齒輪組成,將方向盤的角度轉換為轉向齒條的平移運動,并可以設置轉動剛度、阻尼、摩擦阻力、轉動慣量、左右兩端傳動比、萬向節傳遞(不等速傳遞特性),以及不同EPS助力形式。
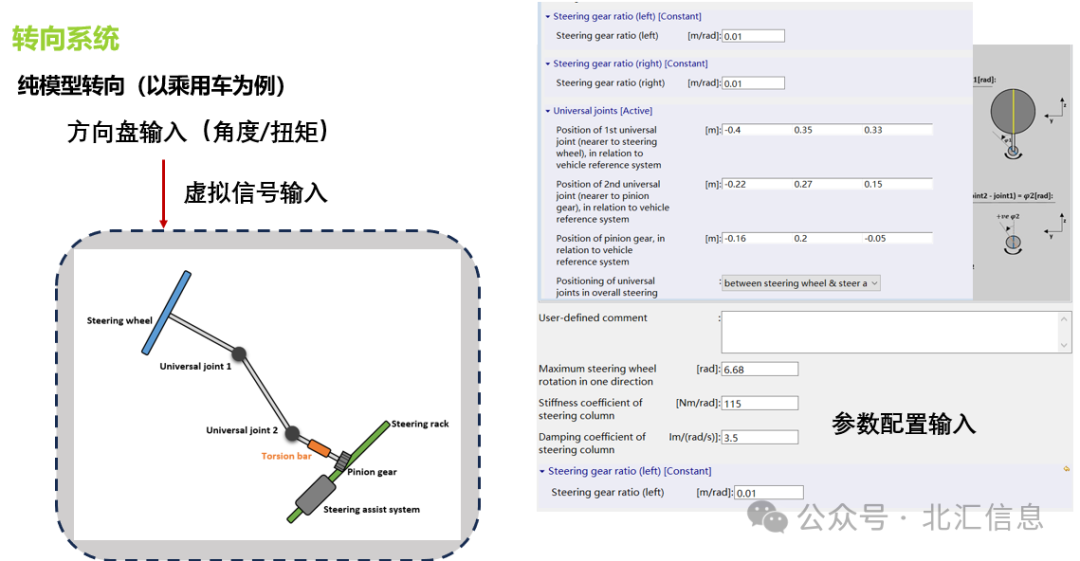
圖8 DYNA4中齒輪齒條式轉向
DYNA4也支持前后四輪轉向。如下圖為主車前、后兩軸實現多輪轉向,同時全掛拖車的前軸隨轉,半掛式拖車同樣也支持。
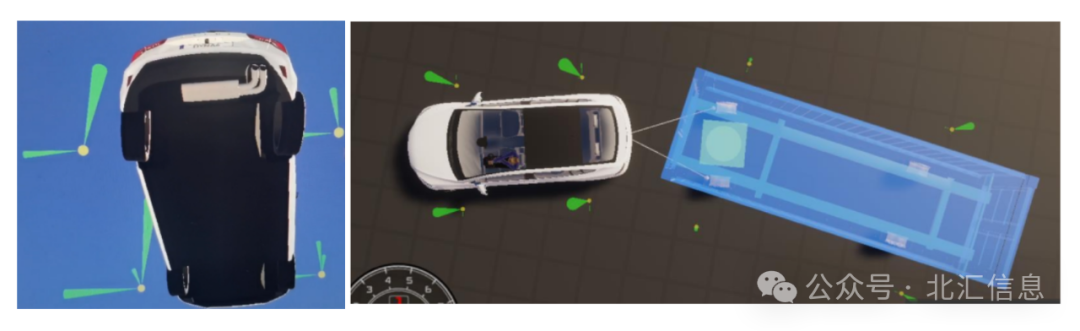
圖9 DYNA4四輪轉向
DYNA4自身包含豐富的場景庫,也提供道路編輯功能,支持用戶自行搭建測試賽道。其動畫顯示采用游戲引擎Unity渲染,最高可達4K分辨率。不同視角的自由切換,幫助工程師更好地觀測車輛行為。
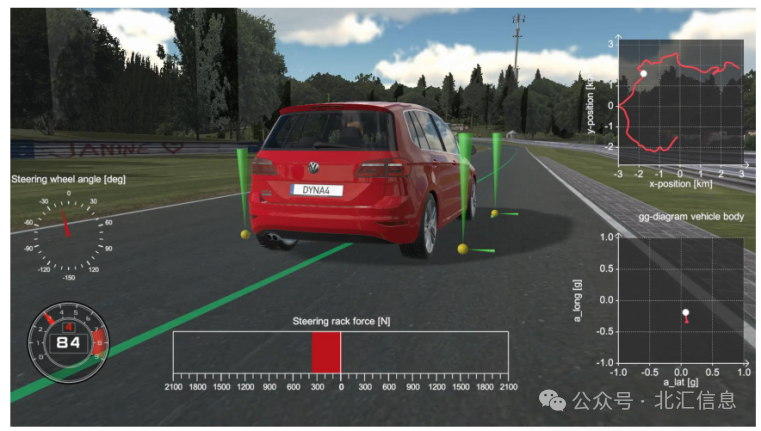
圖10 DYNA4中的道路
在ADAS領域,DYNA4提供交通(Traffic)功能。不同的交通場景包括若干同道車輛以及障礙物。交通車輛支持多種駕駛任務,比如觸發的車速變化,觸發的變道或者這些動作的組合。從DYNA4 R8開始也支持使用OpenSCENARIO來定義和模擬復雜的駕駛場景。通過虛擬測試,自動駕駛和駕駛輔助系統能夠在安全、高效、低成本的條件下進行驗證與優化,為系統在真實道路上的應用奠定基礎。

LKAS演示
以車道線保持功能LKAS(Lane Keeping Assist System)為例,通過觀測動畫以及力反饋方向盤的主動轉動,驗證控制策略實施的效果。LKAS算法接收車道線信息,若識別到脫離行駛車道的行為,會控制電機輸出轉向力矩來修正行駛方向,使車輛處于正確的車道上,同時可以集成脫手檢測功能,例如若駕駛員超過20S未接管方向盤,將自動退出保持,直至檢測到駕駛員手力矩的輸入。此外,也可以加入攝像頭來識別前方車輛,進行自適應巡航(ACC)或者主動緊急制動(AEB)功能的驗證。
北匯信息依托?多年技術積累和項?經驗,可以為OEM和零部件件企業提供全域全鏈的汽?電?測試解決?案,涵蓋五?域,從模型、代碼、HiL臺架到實?測試需求。如需了解更多北匯信息的產品和服務,請隨時聯系我們。期待與您的交流!
注:文章部分圖片來源于Vector。
-
汽車電子
+關注
關注
3026文章
7962瀏覽量
167072 -
線控
+關注
關注
0文章
15瀏覽量
6846 -
自動駕駛
+關注
關注
784文章
13823瀏覽量
166486
發布評論請先 登錄
相關推薦
華為自動駕駛科學家陳亦倫投身具身智能創業

中科創達榮登北京民營企業百強和科技創新百強榜單

數勢科技攜手書亦燒仙草,引領大模型商業化落地






 工商網監
工商網監
評論