 VL53L4CD液位監測(2)----液位檢測
VL53L4CD液位監測(2)----液位檢測
概述
液位檢測在工業自動化、環境監測和消費電子等領域中具有廣泛的應用價值。隨著技術的進步,基于飛行時間(Time-of-Flight, ToF)傳感器的液位檢測解決方案以其高精度、非接觸式測量能力成為了熱門選擇。本文將介紹如何使用 STMicroelectronics 的 VL53L4CD ToF 傳感器進行高精度液位檢測,并重點探討在不同液體和容器條件下如何通過非線性校正算法提升測量準確性。文中還將分析實驗測試結果,并總結液位檢測應用中可能面臨的挑戰及解決方案。
最近在弄ST的課程,需要樣片的可以加群申請:615061293 。
視頻教學
[https://www.bilibili.com/video/BV1gj1BY1Ewe/]
樣品申請
[https://www.wjx.top/vm/OhcKxJk.aspx#]
完整代碼下載
[https://download.csdn.net/download/qq_24312945/89853013]
硬件準備
首先需要準備一個開發板,這里我準備的是自己繪制的開發板,需要的可以進行申請。
STSW-IMG039
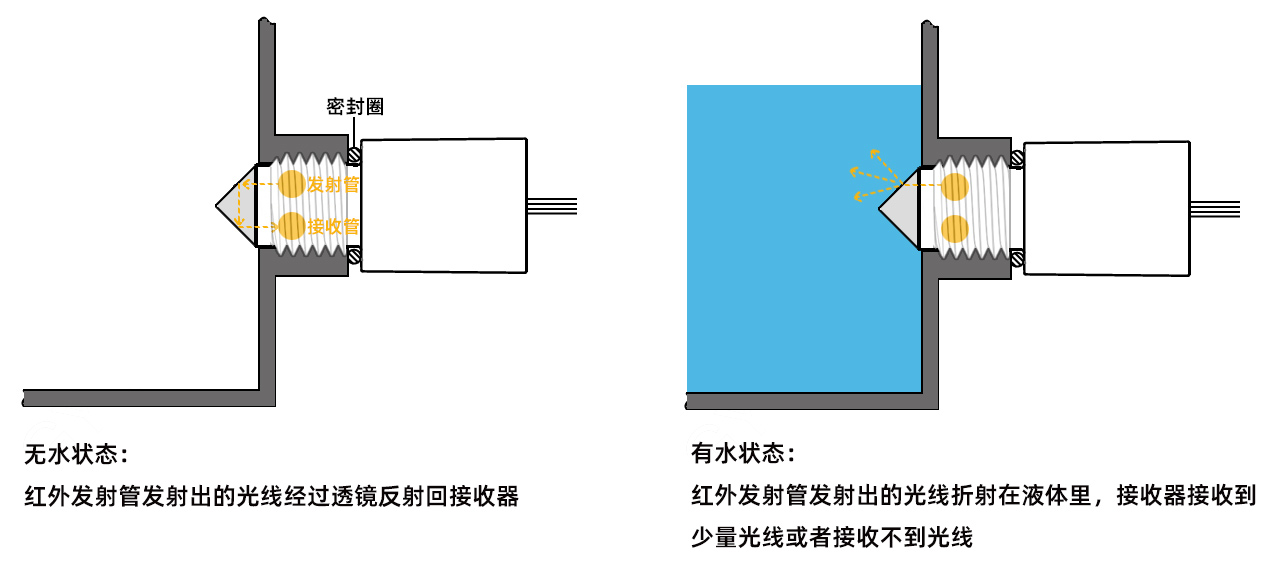
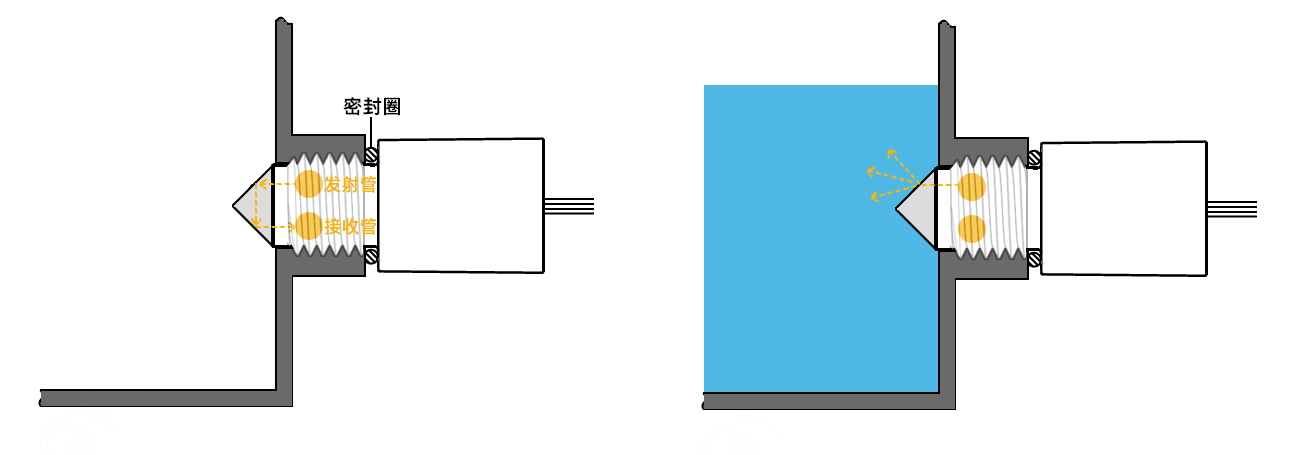
該液位監測解決方案基于意法半導體渡越時間測距傳感器,可與VL53L4CD渡越時間高精度接近傳感器或具有寬視野的VL53L5CX渡越時間8x8多區測距傳感器配合使用。
采用FlightSense技術的創新型意法半導體解決方案支持用戶使用非機械傳感器來測量液體的液位,以降低銹蝕風險。意法半導體解決方案可以十分精準地測量各種液體,包括透明的水和深色的燃料等等。
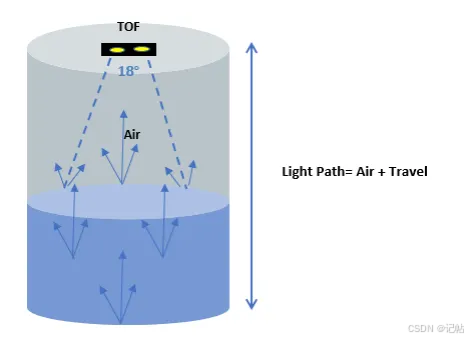
VL53L4CD適用于接近測量和短距離測量,可實現從僅僅1 mm到1300 mm的超精準距離測量。新一代激光發射器具有18°FoV(視場),提高了環境光下的性能,其測距速度高達100 Hz。
容器特性
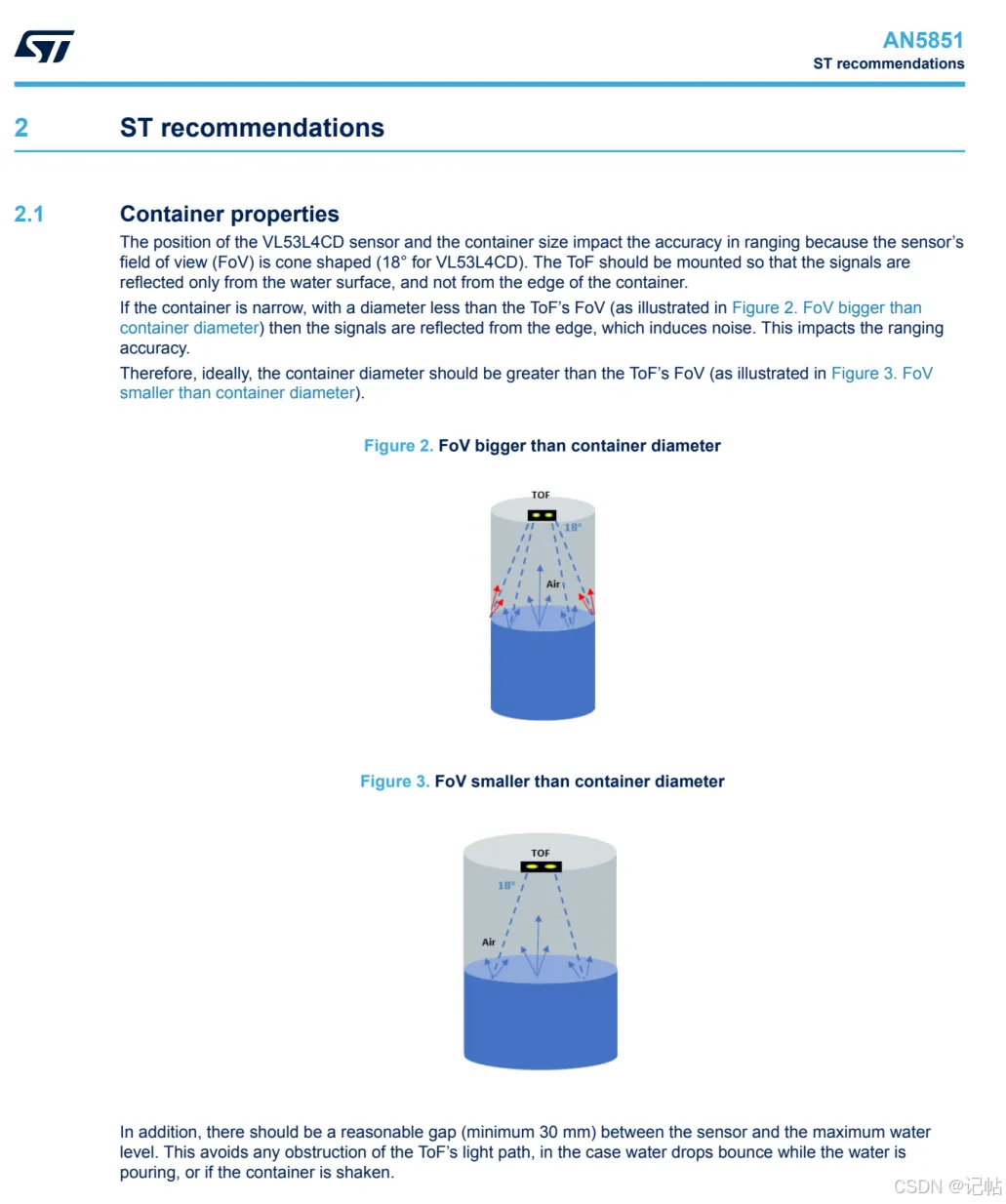
AN5851 文件的內容,第二章主要講解了 ST 的建議,該章節分為兩個部分,討論了容器的屬性和反射率對測量精度的影響,并給出了相應的優化建議。
容器的尺寸和傳感器的視場角 (FoV):VL53L4CD 傳感器的視場角是錐形的(18°),因此,如果容器的直徑小于傳感器的視場角,測量信號可能會從容器的邊緣反射回來,導致測量精度下降。為了避免這一問題,建議使用直徑大于傳感器視場的容器。
傳感器與液體表面的距離:傳感器應放置在液面最高點上方至少 30 毫米的位置,以避免水滴反彈或容器晃動時造成的信號干擾,從而影響測量準確性。
低反射率容器:建議使用底部低反射率的容器,因為當液面較低時,如果容器底部反射信號過強,可能會與從液面反射回來的信號混淆,導致測量錯誤。
透明或高反射率容器的影響:透明或高反射率的容器底部容易導致測量信號混亂,尤其是在液面較低時。因此,低反射率的底部設計能夠減少信號干擾,提高測量精度。

包含必要的頭文件
/* USER CODE BEGIN Includes */
#include "vl53l4cd_api.h" // VL53L4CD 傳感器 API
#include "custom_ranging_sensor.h" // 自定義測距傳感器頭文件
/* USER CODE END Includes */
變量定義
/* USER CODE BEGIN 0 */
int status;// 存儲操作狀態
volatile int IntCount;// 中斷計數器
uint8_t p_data_ready;// 數據準備標志
uint16_t dev, sensor_id;// 設備 ID 和傳感器 ID
VL53L4CD_ResultsData_t results; /* Results data from VL53L4CD */
VL53L4CD_Version_t sw_version; /* Driver version */
/* Below code has to be updated depending on customer setup parameters */
/* Start: Measure liquid level application*/
/* Consider X indicator levels and define a structure to store level, expected result and compensation value*/
// 液位標志的數量,定義有 10 個級別
#define MAX_LABEL 10 /* Number of level indicators – To be updated depending on the number of levels in the OffGainVal.csv file */
typedef struct ogalgo_data
{
uint8_t level ;// 液位級別
uint16_t expected_res;// 預期測量結果
uint16_t og_val;// 補償值
}ogalgo_data;
/* Design a lookup table with a structure of compensate value data received from GUI once characterization is done*/
/* First column : indicator level , Second column: Expected result , Third column: compensate value*/
/* Example of values given below - To be updated with values from the GUI*/
/* 使用測量補償數據初始化查找表 */
ogalgo_data ogalgo_data_inst[MAX_LABEL]={
{ 9, 21, 4 },
{ 8, 42, 4 },
{ 7, 63, 2 },
{ 6, 84, 1 },
{ 5, 105, 5 },
{ 4, 126, 14 },
{ 3, 147, 25 },
{ 2, 168, 30 },
{ 1, 189, 20 },
};
/* Ranging 函數的原型聲明 */
int Ranging(Dev_t dev,uint16_t *ouputranging);
/* 開啟算法標志 */
uint8_t algo_enable=1; /* algo_enable=1 to apply the lookup table - algo_enable=0 to not apply */
uint16_t totaldistance=270; /* 傳感器到容器底部的高度,單位為毫米 */
uint16_t meanranging=0;// 平均測距值
uint16_t rangevalue_out=0;// 最終補償后的測距值
uint16_t invalid_range=999;// 無效測距值
void get_data_by_polling(Dev_t dev);// 數據輪詢獲取函數
/* USER CODE END 0 */
測距函數 Ranging()
該函數執行 10 次測距操作并計算平均值,確保測量結果的穩定性。
/* Ranging 函數 - 獲取測量數據并計算平均值 */
int Ranging(Dev_t dev,uint16_t *ouputranging)
{
uint8_t cnt=0;uint16_t mean_distance=0;uint16_t meanranging=0;
/* 進行 10 次測量,取平均值 */
for (cnt = 0; cnt < 10;)
{
status = VL53L4CD_CheckForDataReady(dev, &p_data_ready);
// printf("status11=%d,data_ready=%dn",status,p_data_ready);
HAL_Delay(3);
if (p_data_ready)
{
VL53L4CD_ClearInterrupt(dev);
VL53L4CD_GetResult(dev, &results);
if(results.range_status ==0)
{
mean_distance+=results.distance_mm;
cnt++;
HAL_Delay(3);
}
}
}
// printf("cnt=%dn",cnt);
meanranging=mean_distance/10;// 計算平均值
*ouputranging =meanranging;
return status;
}
液位誤差補償函數 Liquidlevelmeasureerrorcomponsate()
/* 液位測量誤差補償函數 */
void Liquidlevelmeasureerrorcomponsate(uint16_t rangevalue,uint16_t *rangevalue_out)
{
uint16_t pos=0;
uint16_t i=0; uint16_t value;
for (i=0;i< MAX_LABEL;i++)
{
if (rangevalue < totaldistance+5) //5 buffer
{
if (rangevalue < ogalgo_data_inst[i].expected_res)
{
//Check first
if (i >0)
{
value = (ogalgo_data_inst[i].expected_res + ogalgo_data_inst[i-1].expected_res)/2;
}
else
value = ogalgo_data_inst[i].expected_res;
if(rangevalue <= value)
{
/* First position */
if (i ==0 )
{
pos=1;
break;
}
pos=1+(i-1); // adding one bcz position starts from 1
break;
}
else
{
pos=1+i;
break;
}
}
else
{
if (rangevalue > totaldistance+5)
pos=99;
else
pos=6; // Need to find which one is max OG value or store it directly here
}
}
else
pos=99;
}
/* 根據位置補償測量值 *//
switch(pos)
{
case 1:
*rangevalue_out=rangevalue + ogalgo_data_inst[pos].og_val; // Category Underranging,
break;
case 2:
*rangevalue_out=rangevalue + ogalgo_data_inst[pos].og_val; // Category Underranging, 30mm average b/w C3&C2
break;
case 3:
*rangevalue_out=rangevalue + ogalgo_data_inst[pos].og_val; // Category Underranging, 25mm average b/w C4&C3
break;
case 4:
*rangevalue_out=rangevalue + ogalgo_data_inst[pos].og_val; // Category Underranging, 12mm average b/w C2&C2
break;
case 5:
*rangevalue_out=rangevalue - ogalgo_data_inst[pos].og_val; // Category Overranging, 4mm average b/w C2&C2
break;
case 6:
*rangevalue_out=(uint16_t)(rangevalue - ogalgo_data_inst[pos].og_val); // Category Overranging,
break;
case 7:
*rangevalue_out=(uint16_t)(rangevalue - ogalgo_data_inst[pos].og_val); //Category Overranging,
break;
case 8:
*rangevalue_out=(uint16_t)(rangevalue - ogalgo_data_inst[pos].og_val); // Category Overranging,
break;
case 9:
*rangevalue_out=(uint16_t)(rangevalue - ogalgo_data_inst[pos].og_val); // Category Overranging,
break;
default:
printf("Valid water level not foundn");
}
}
/* End:Measure liquid level application */
數據輪詢函數 get_data_by_polling()
該函數不斷輪詢 VL53L4CD 傳感器的數據,計算平均測距值并輸出補償后的液位數據。
/* 通過輪詢獲取數據 */
void get_data_by_polling(Dev_t dev){
do
{
/* Liquid level Measure application */
status=Ranging(dev,&meanranging);
if (!status)
{
if (algo_enable == 1)
{
Liquidlevelmeasureerrorcomponsate(meanranging,&rangevalue_out);
//printf("rg=%d %dn",meanranging, rangevalue_out);
if (rangevalue_out >0)
printf("Liquid level is = %d mmn",rangevalue_out);
else
printf("Invalid range is = %d mmn",invalid_range);
}
else
printf("Mean ranging is = %d mmn",meanranging);
}
}
while(1);
}
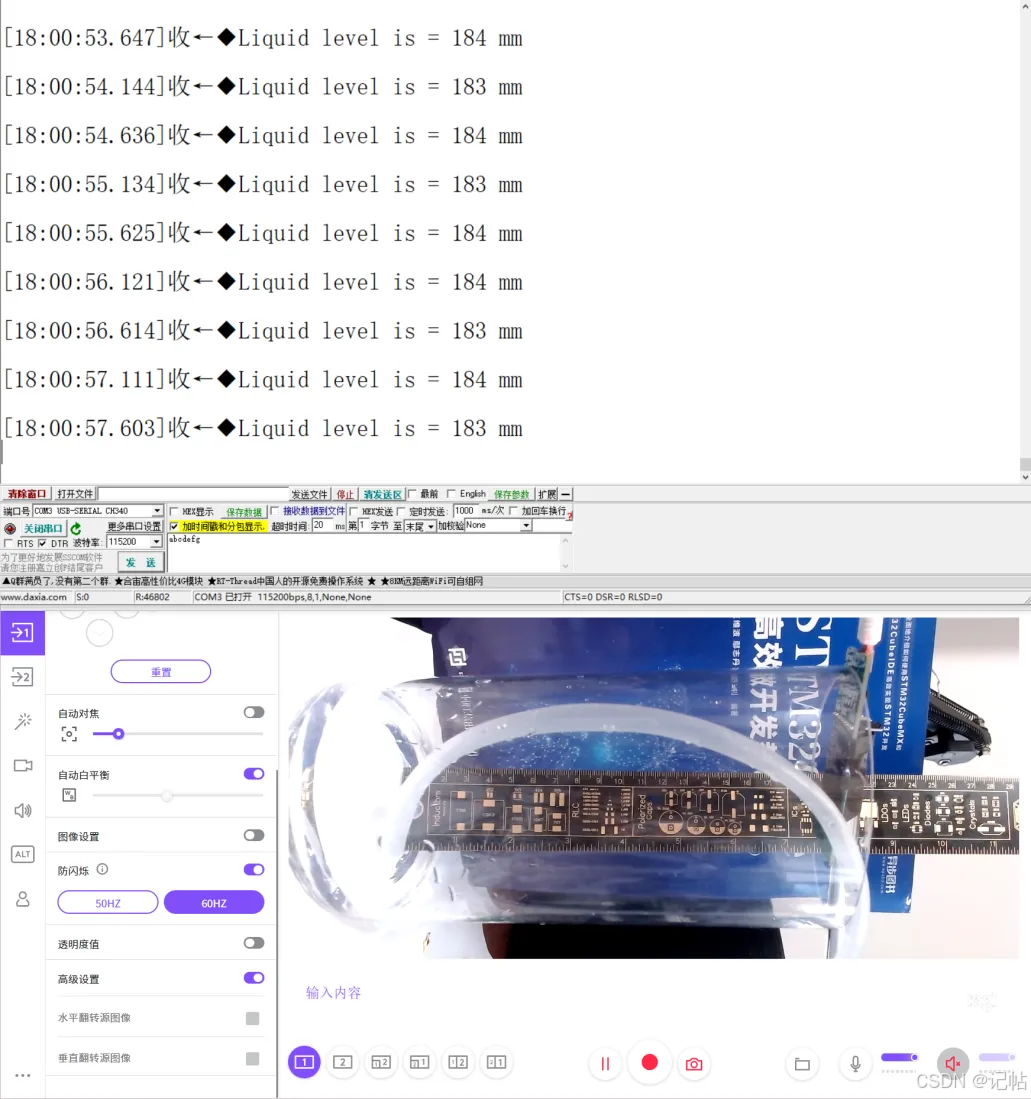
演示
水瓶大概19cm左右,當只剩下一點水時。
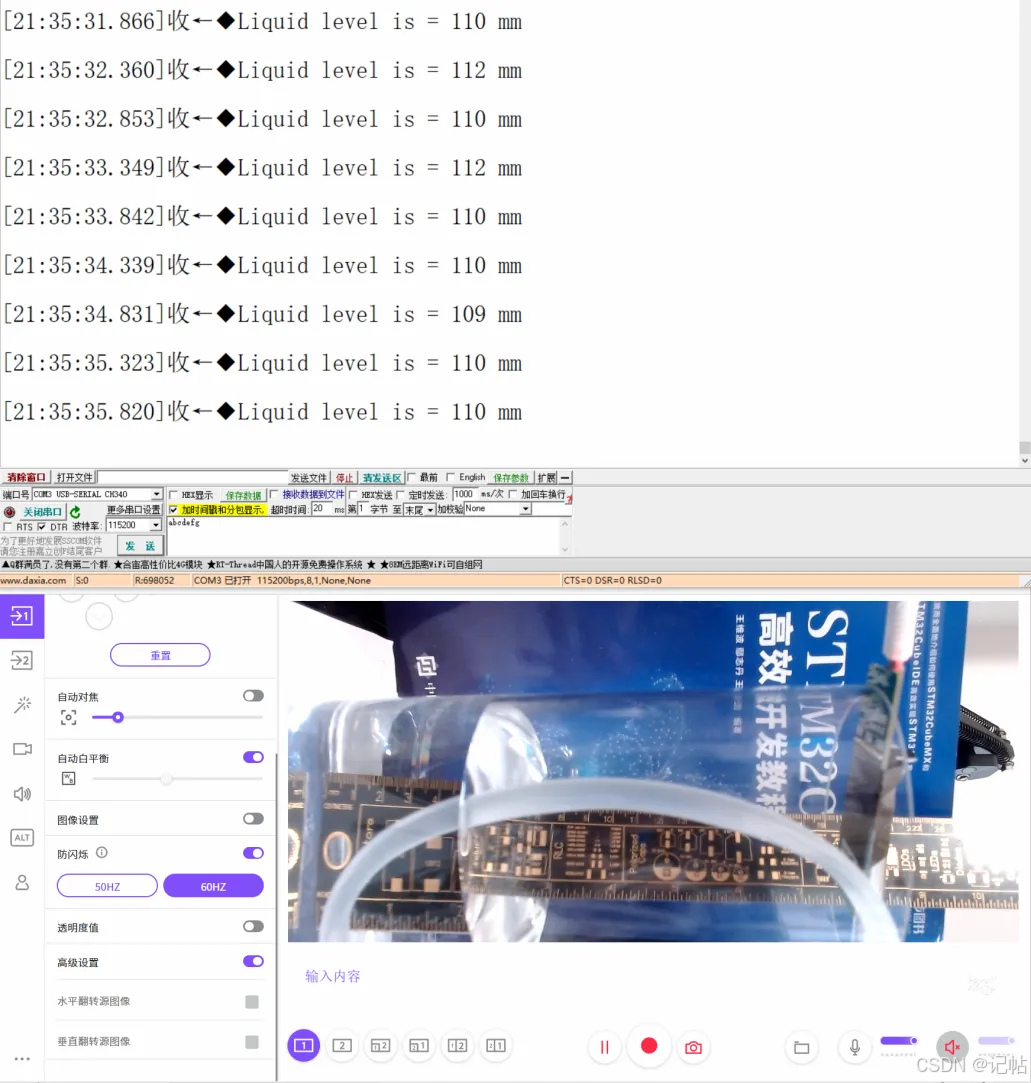
加水到7cm左右。
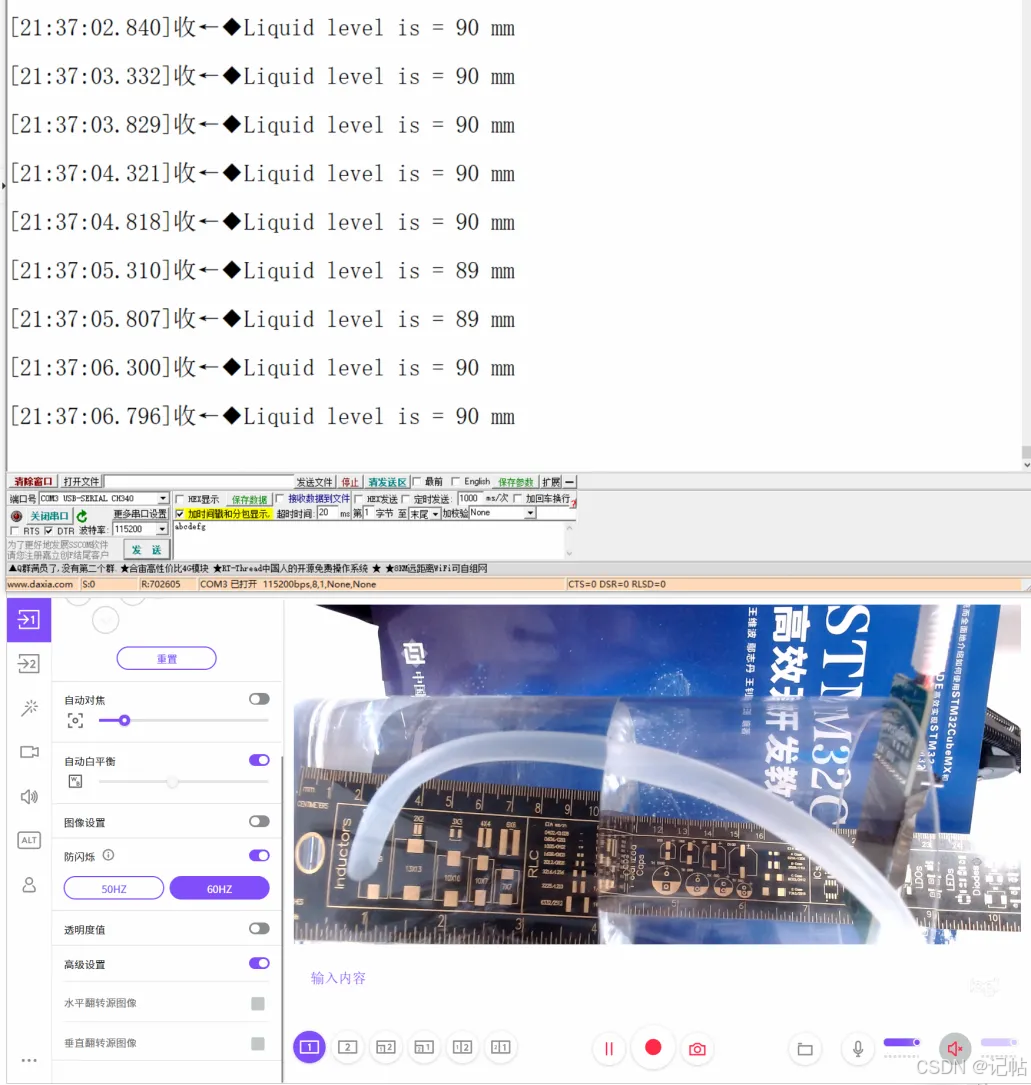
加水到11cm左右。
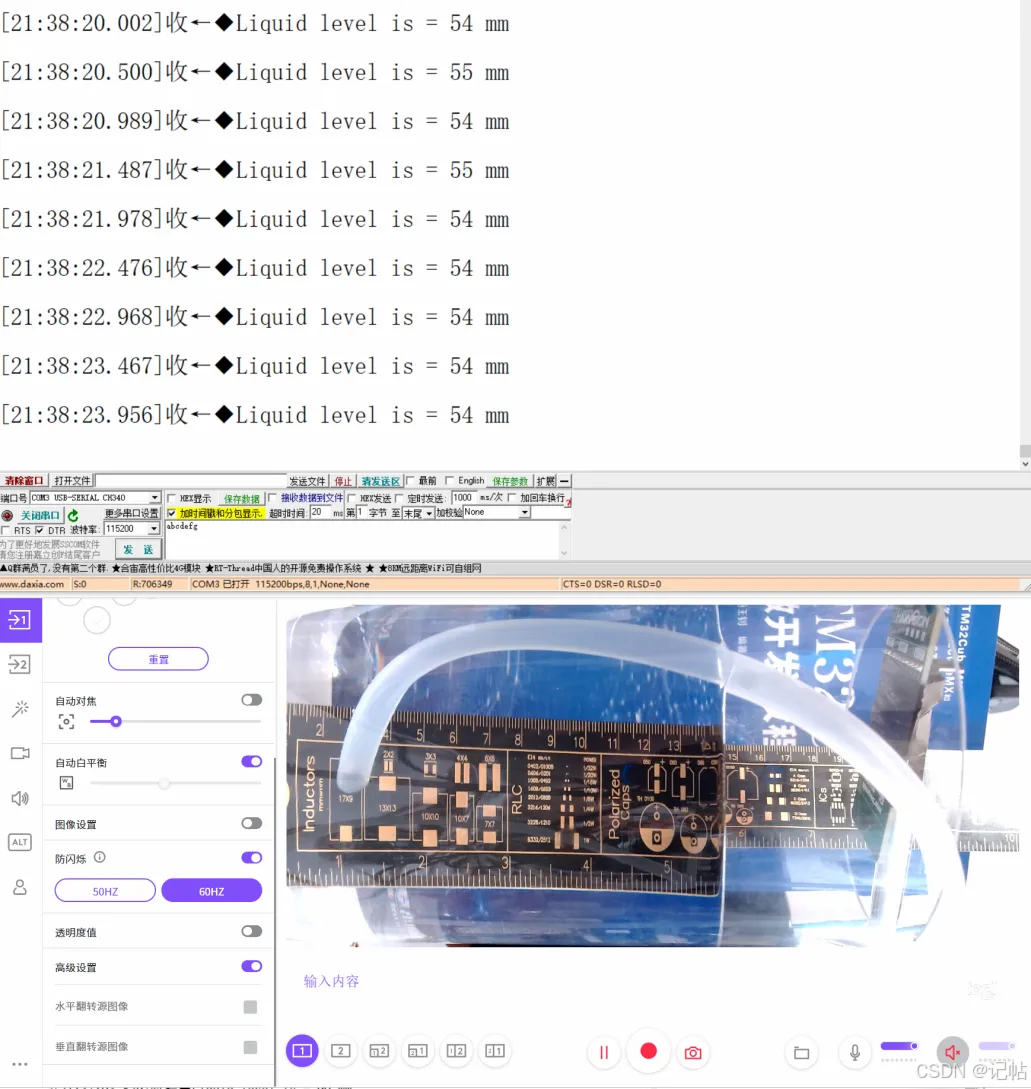
加水到14左右。
審核編輯 黃宇
-
液位檢測
+關注
關注
0文章
47瀏覽量
9421 -
TOF
+關注
關注
9文章
483瀏覽量
36349
發布評論請先 登錄
相關推薦
VL53L4CD TOF開發(1)----驅動TOF進行測距
VL53L4CD TOF開發(2)----修改測量頻率
VL53L4CD TOF開發(3)----檢測閾值
VL53L4CD TOF開發(4)----單次測量(One-Shot)模式
VL53L4CD能否實現~50uA@1Hz類似的功耗?
智慧排水窨井液位監測系統方案


VL53L4CD液位監測(1)----驅動TOF進行測距





 工商網監
工商網監
評論