") RTSys:自主自研、簡(jiǎn)單易用的運(yùn)動(dòng)控制集成開(kāi)發(fā)平臺(tái)(上)
RTSys:自主自研、簡(jiǎn)單易用的運(yùn)動(dòng)控制集成開(kāi)發(fā)平臺(tái)(上)

機(jī)器視覺(jué)運(yùn)動(dòng)控制開(kāi)發(fā)軟件RTSys
RTSys新版現(xiàn)已正式發(fā)布!上一版本ZDevelop自發(fā)布以來(lái)便受到大量應(yīng)用,用戶(hù)遍及3C,包裝,印刷,激光,醫(yī)藥等各大產(chǎn)業(yè)及全國(guó)眾多客戶(hù)。
在取得一系列應(yīng)用成果的同時(shí),也在吸納大量用戶(hù)反饋。RTSys的重磅升級(jí)包括以下幾個(gè)方面:
(1)軟件開(kāi)發(fā)環(huán)境風(fēng)格全面提升
美觀度提升、模塊分類(lèi)清晰、多種主題風(fēng)格可選。
(2)軟件支持在線升級(jí)功能
RTSys在市場(chǎng)需求下也在持續(xù)優(yōu)化,后續(xù)優(yōu)化推出的版本可直接在軟件中收取通知并選擇是否升級(jí)。免去重新卸載安裝等繁瑣步驟。
(3)文件視圖更新為工程視圖
新增便捷的軸配置和EtherCAT總線配置功能。
(4)支持的編程語(yǔ)言由3種新增至4種
在支持RTBasic、RTPlc梯形圖、RTHmi的基礎(chǔ)上新增了C語(yǔ)言。
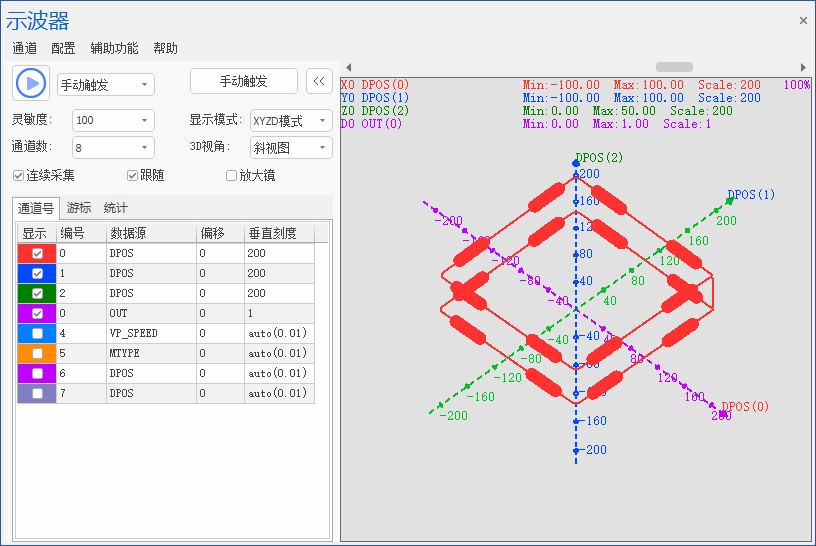
(5)示波器全面升級(jí)
界面全新升級(jí);新增“疊加通道、對(duì)比波形、搜索波形”,新增“XYZD”模式等功能。
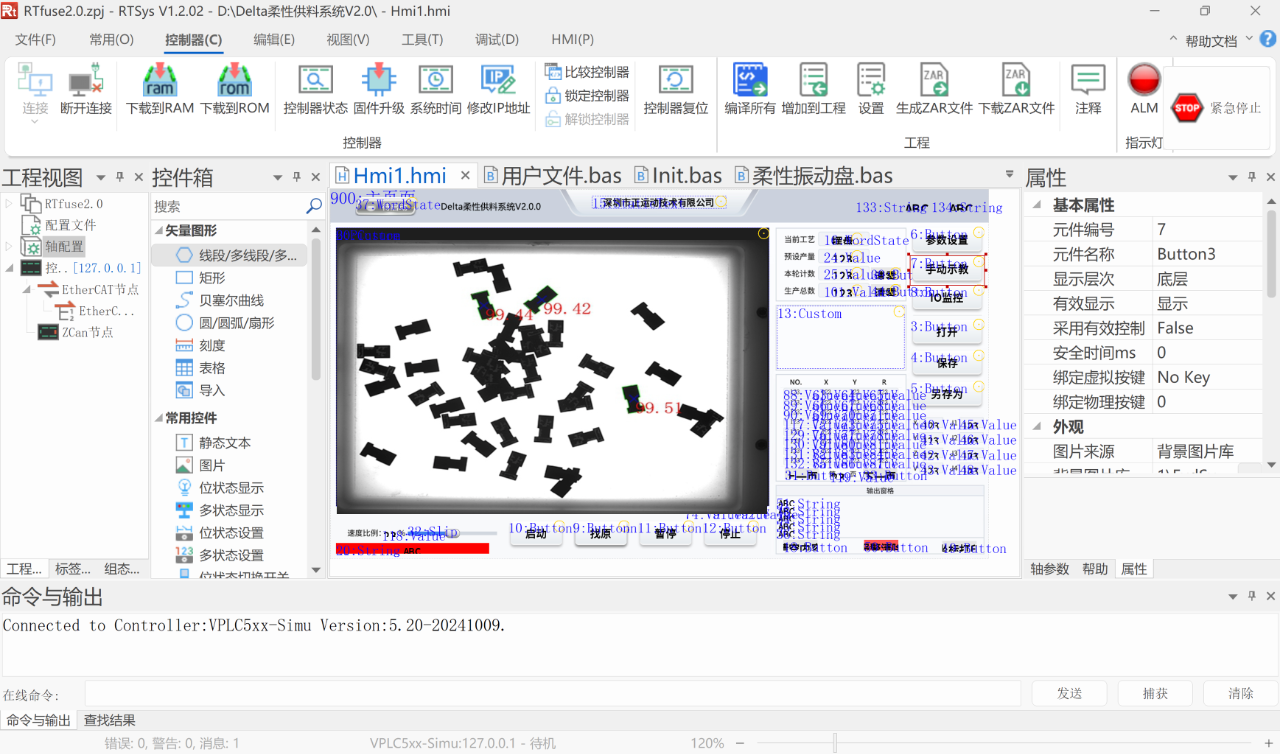
(6)HMI編程全新升級(jí)
使用便捷性提升、控件風(fēng)格畫(huà)質(zhì)全面提升、控件新增便捷的屬性等。
RTSys更多精彩等你來(lái)發(fā)現(xiàn)!
下面正式介紹RTSys開(kāi)發(fā)環(huán)境在運(yùn)動(dòng)控制中的優(yōu)勢(shì)及功能!由于RTSys功能豐富多樣,本文分為上下兩篇,本篇主要介紹以下內(nèi)容:
一、RTSys開(kāi)發(fā)環(huán)境介紹及優(yōu)勢(shì)
二、RTSys安裝的環(huán)境要求
三、RTSys的安裝步驟
五、RTSys主要視圖窗口介紹
六、RTSys控制器常用操作工具
01RTSys開(kāi)發(fā)軟件簡(jiǎn)介以及優(yōu)勢(shì)
???RTSys開(kāi)發(fā)環(huán)境簡(jiǎn)介
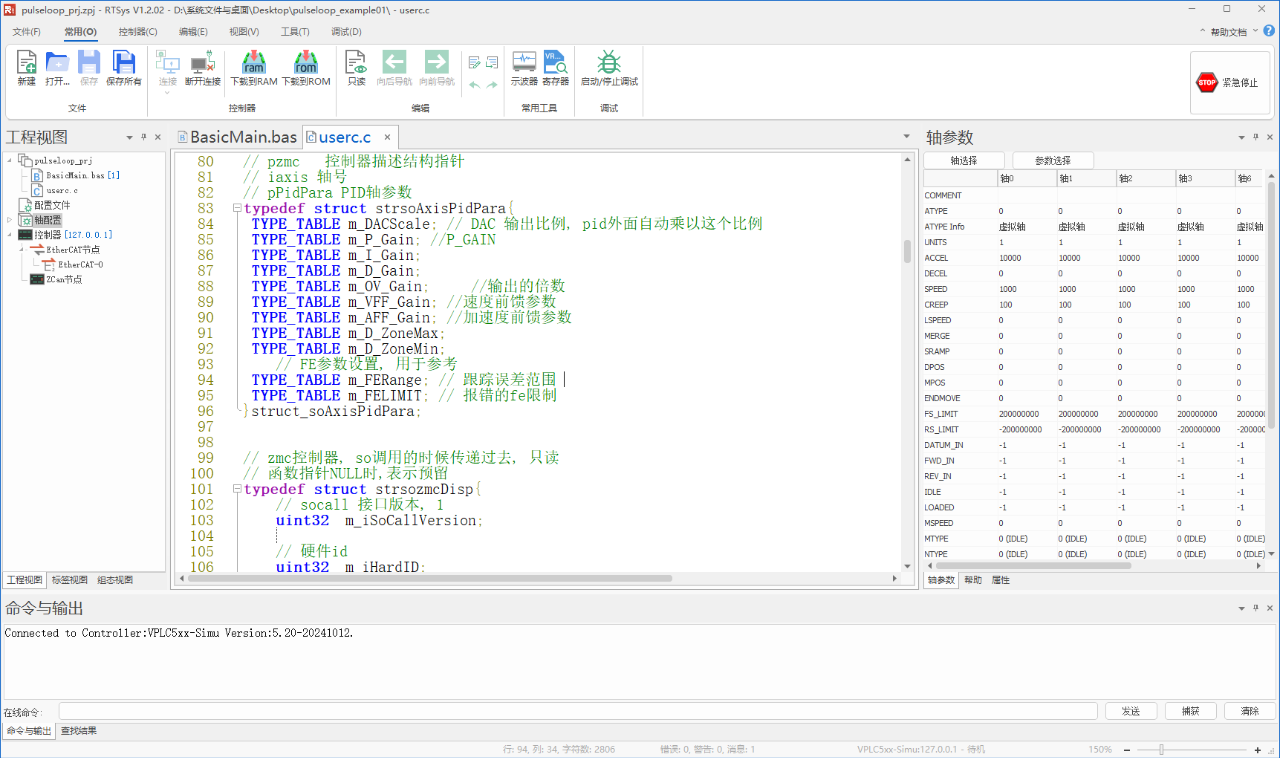
RTSys是正運(yùn)動(dòng)推出的一款純國(guó)產(chǎn)自主工業(yè)軟件IDE的開(kāi)發(fā)環(huán)境,集成了運(yùn)動(dòng)控制+機(jī)器視覺(jué)功能,支持RTBasic、RTPlc梯形圖、RTHmi、C語(yǔ)言、RTVision機(jī)器視覺(jué)等二次開(kāi)發(fā),支持四種語(yǔ)言混合編程。其優(yōu)勢(shì)在于可快速面向不同開(kāi)發(fā)需求的用戶(hù),通過(guò)一個(gè)軟件配合運(yùn)動(dòng)控制器即可實(shí)現(xiàn)一站式開(kāi)發(fā)。
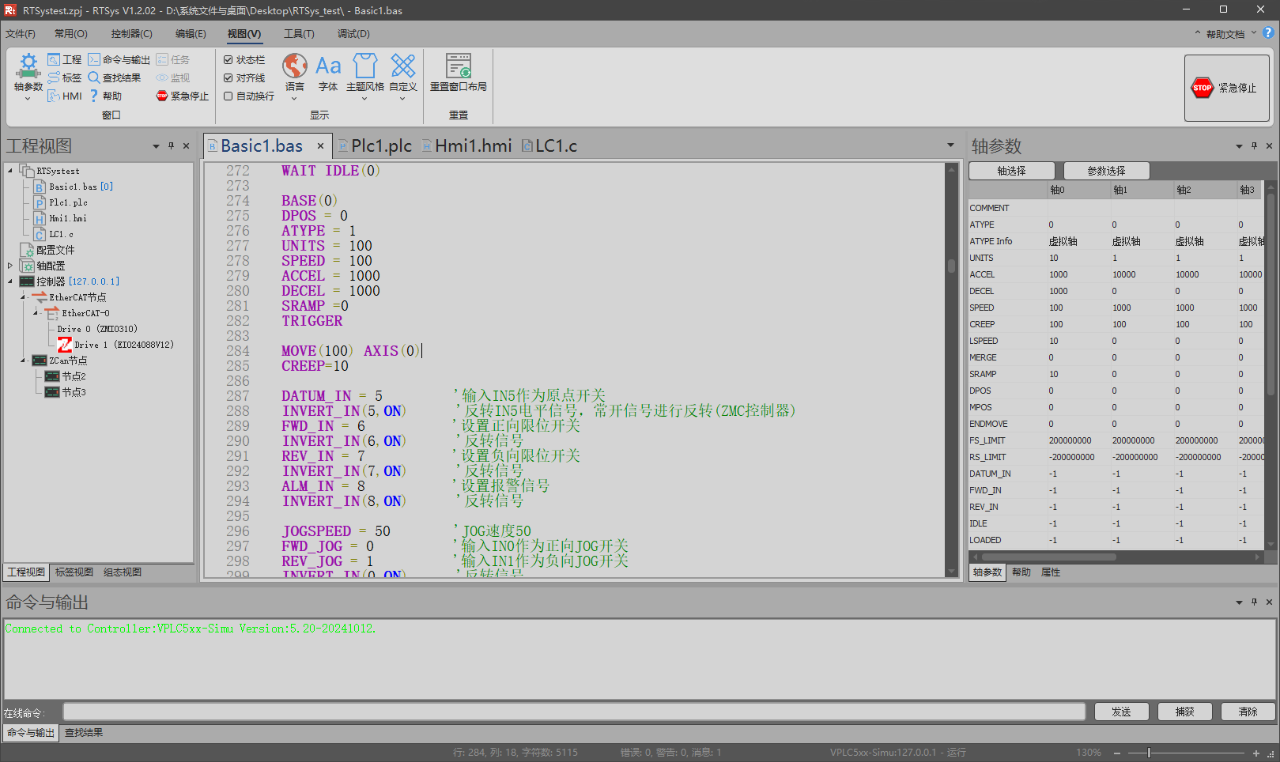
同時(shí)RTSys軟件提供了實(shí)時(shí)仿真、在線跟蹤以及診斷與調(diào)試等工具/功能。有利于用戶(hù)通過(guò)軟件實(shí)現(xiàn)快速、實(shí)時(shí)地對(duì)程序進(jìn)行調(diào)試。通過(guò)RTSys軟件可快速實(shí)現(xiàn)智能裝備的視覺(jué)定位、測(cè)量、識(shí)別、檢測(cè)和復(fù)雜的運(yùn)動(dòng)控制等系統(tǒng)的開(kāi)發(fā)。RTSys軟件開(kāi)發(fā)界面如下圖所示。
???RTSys開(kāi)發(fā)環(huán)境優(yōu)勢(shì)
使用RTSys支持的編程語(yǔ)言配合正運(yùn)動(dòng)的運(yùn)動(dòng)控制器產(chǎn)品進(jìn)行開(kāi)發(fā),程序可直接下載到控制器中,并支持掉電保存和脫機(jī)運(yùn)行。相比于用上位機(jī)等高級(jí)語(yǔ)言開(kāi)發(fā)多了一層保護(hù),PC上位機(jī)開(kāi)發(fā)不支持脫機(jī)運(yùn)行。RTSys支持多任務(wù)運(yùn)行,其中Basic可以多任務(wù)運(yùn)行,支持與Plc和Hmi、C語(yǔ)言編程混合編程并互相調(diào)用。另外RTSys提供了仿真器和XPLC Screen工具,可用于無(wú)控制器或無(wú)觸摸屏場(chǎng)合時(shí)進(jìn)行編程調(diào)試。
???RTSys軟件與控制器開(kāi)發(fā)系統(tǒng)
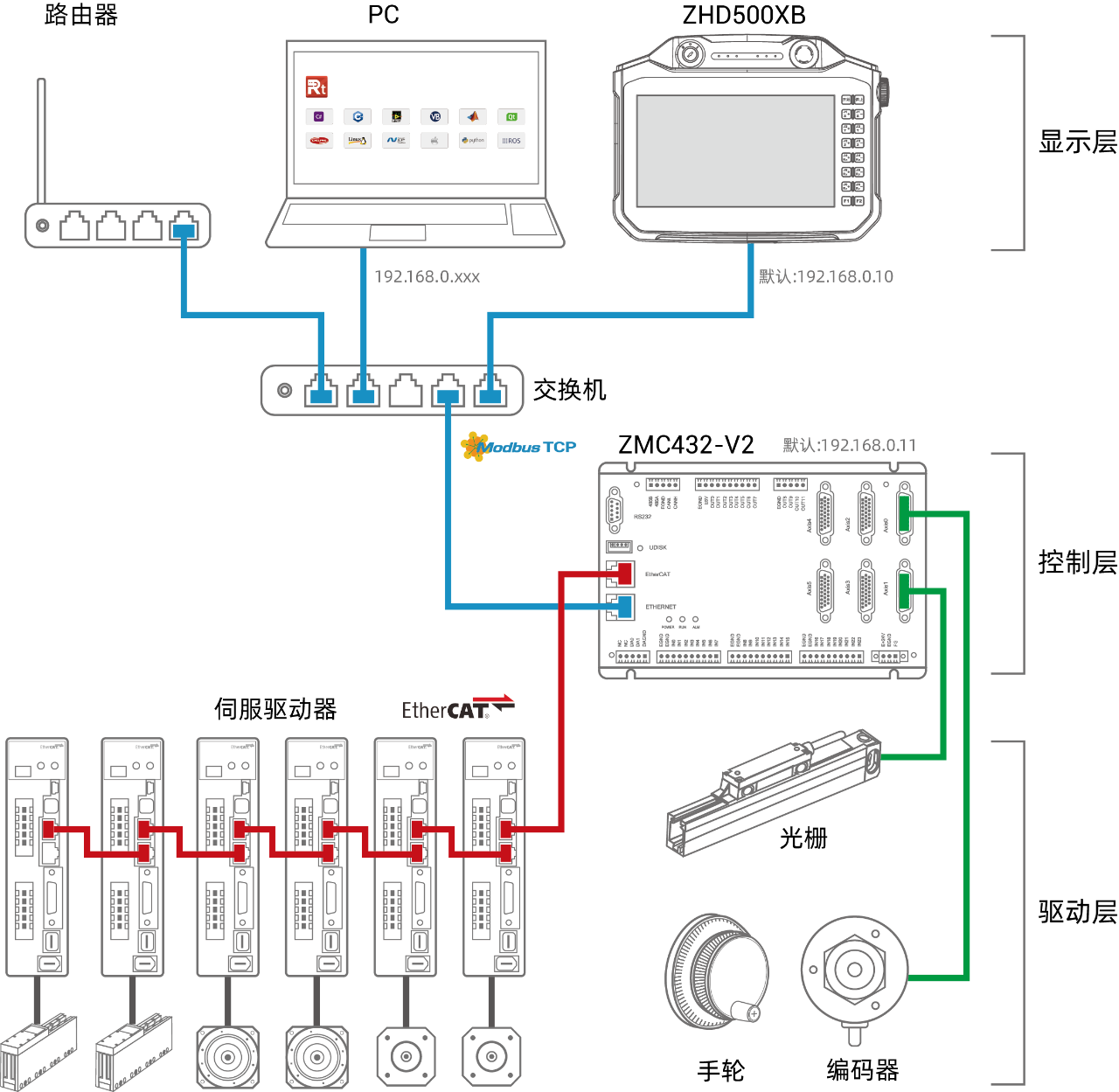
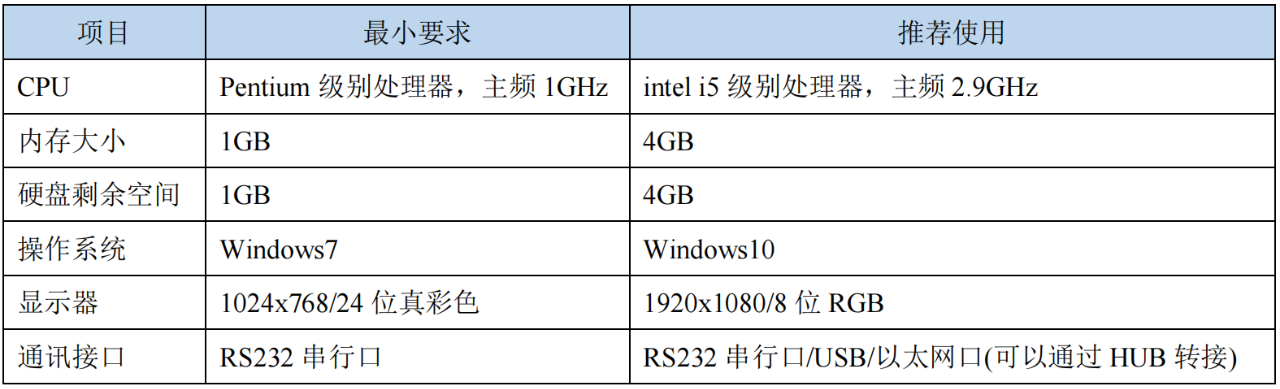
???使用RTSys軟件有如下硬件要求
02RTSys開(kāi)發(fā)環(huán)境安裝
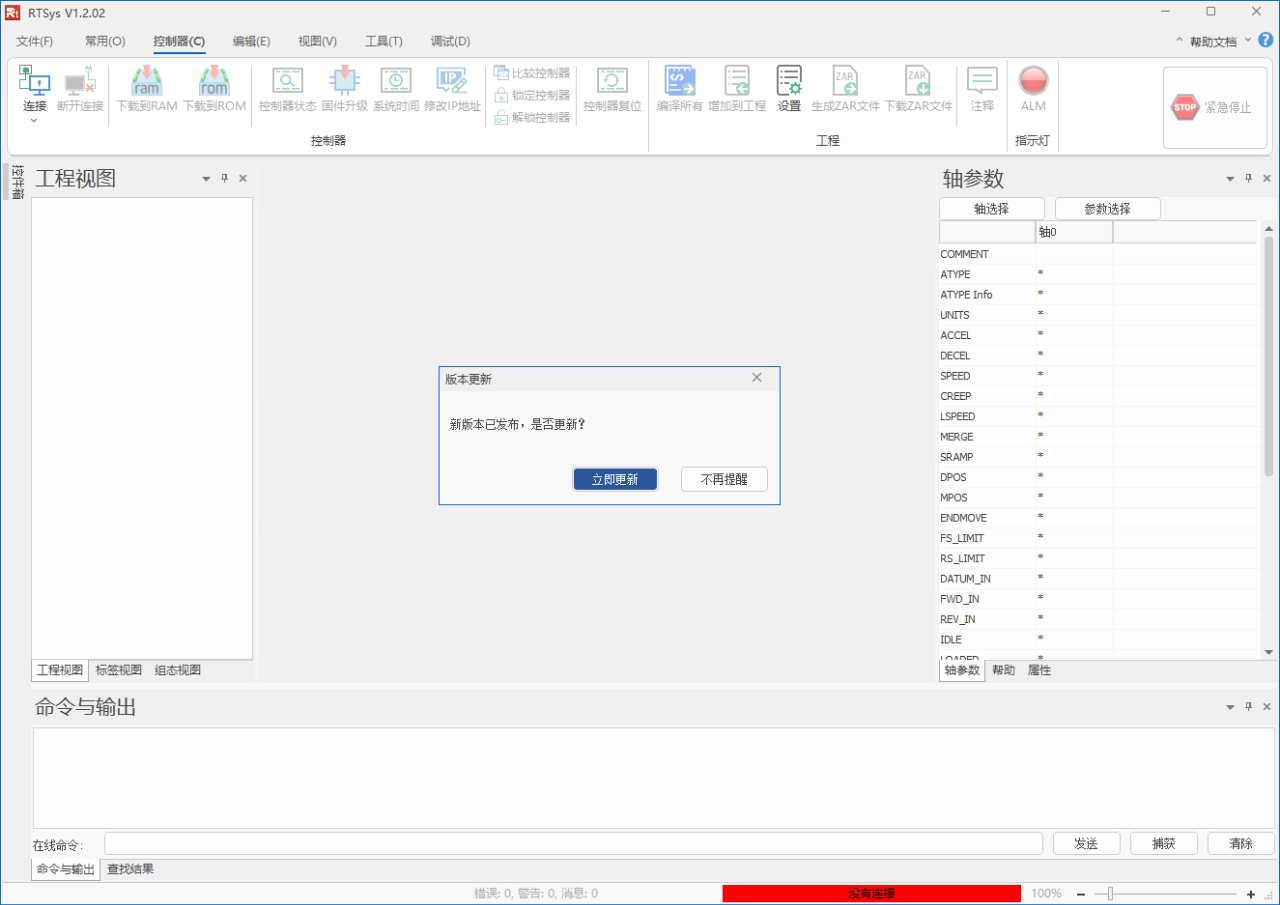
RTSys軟件采用安裝包下載形式,由此實(shí)現(xiàn)支持在線升級(jí)更新功能。當(dāng)軟件升級(jí)更新推出時(shí),軟件出現(xiàn)新版更新提示,用戶(hù)可及時(shí)、實(shí)時(shí)使用到最新版RTSys軟件。
???軟件安裝步驟如下
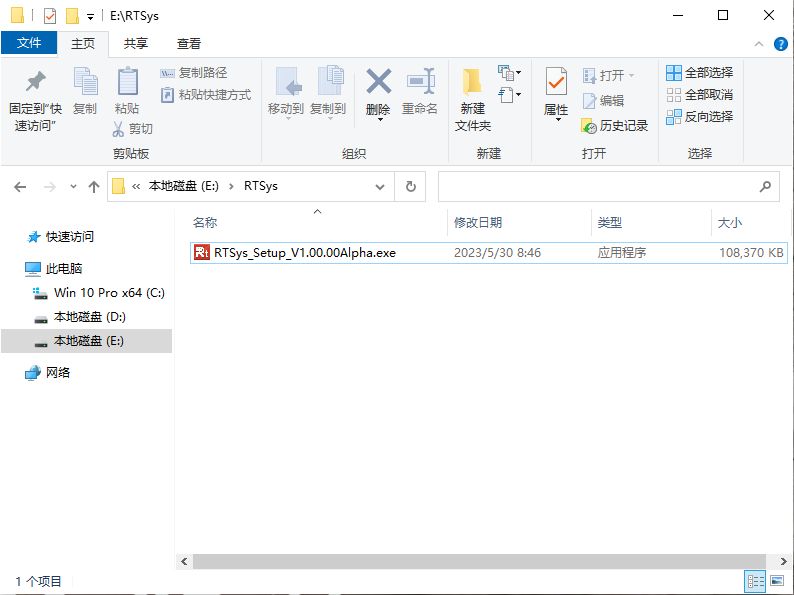
1.從正運(yùn)動(dòng)技術(shù)官網(wǎng)獲取RTSys軟件安裝包,存放至目標(biāo)路徑下(用戶(hù)自行選擇路徑)。將安裝包解壓后,得到如下圖所示的.exe應(yīng)用程序。

注:下圖版本號(hào)不一定固定,軟件版本號(hào)會(huì)隨軟件更新而更新。從正運(yùn)動(dòng)技術(shù)官網(wǎng)下載最新版的即可。
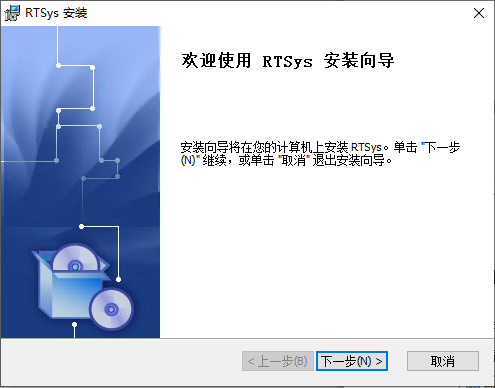
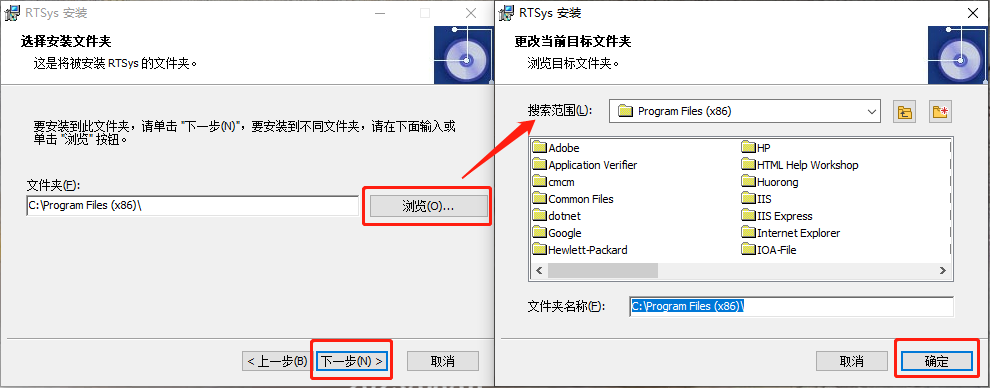
2.鼠標(biāo)雙擊打開(kāi)該.exe應(yīng)用程序。彈出如下窗口,點(diǎn)擊“下一步”。
3.點(diǎn)擊“瀏覽”選擇軟件安裝路徑。確定安裝路徑后點(diǎn)擊“確定”,并點(diǎn)擊“下一步”。
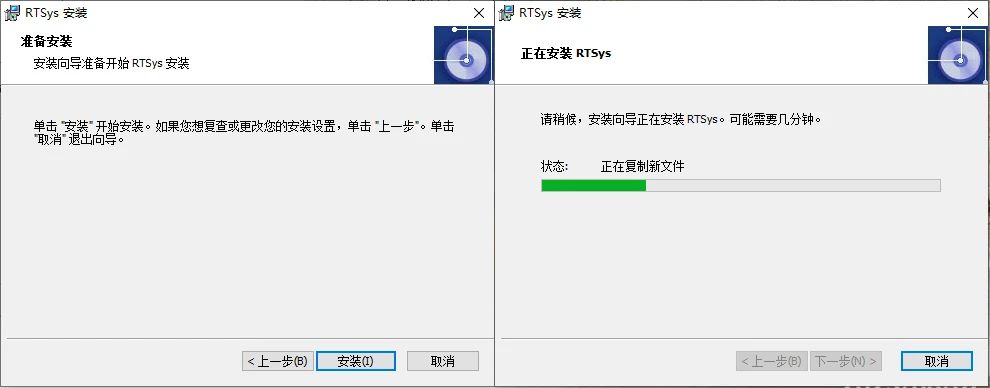
4.點(diǎn)擊“安裝”即可開(kāi)始安裝軟件。右圖即正在安裝。
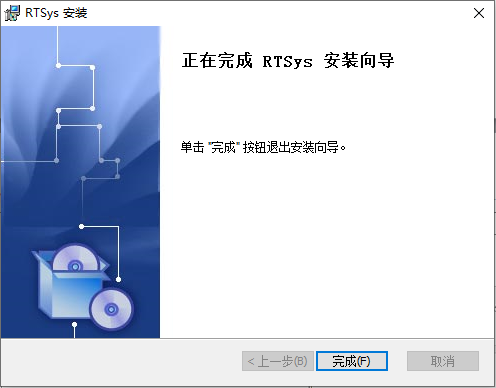
5.安裝成功則彈出如下窗口,點(diǎn)擊“完成”即可。
RTSys開(kāi)發(fā)環(huán)境主要功能
1.支持RTBasic、RTPlc、RTHmi、C四種編程環(huán)境;
2.實(shí)時(shí)監(jiān)控控制器的運(yùn)行狀態(tài);
3.支持在線調(diào)試;
4.支持多任務(wù)運(yùn)行;
5.支持控制器與觸摸屏仿真(針對(duì)沒(méi)有控制器或觸摸屏的場(chǎng)合);
6.支持手動(dòng)操作控制器--手動(dòng)運(yùn)動(dòng)視圖;
7.支持查看各類(lèi)寄存器數(shù)據(jù)--寄存器視圖;
8.支持示波器采集顯示多種類(lèi)型的數(shù)據(jù)(示波器視圖);
9.支持操作輸入口輸出口的狀態(tài)(輸入口/輸出口視圖);
10.支持PWM寫(xiě)入/讀取、SDO數(shù)據(jù)字典讀取/寫(xiě)入;
11.支持加密下載程序、鎖定控制器、保護(hù)客戶(hù)知識(shí)產(chǎn)權(quán)(生成ZAR文件、鎖定控制器);
12.方便客戶(hù)快速升級(jí)固件與用戶(hù)程序升級(jí)(固件升級(jí)、下載ZAR文件)。
03 RTSys模擬仿真
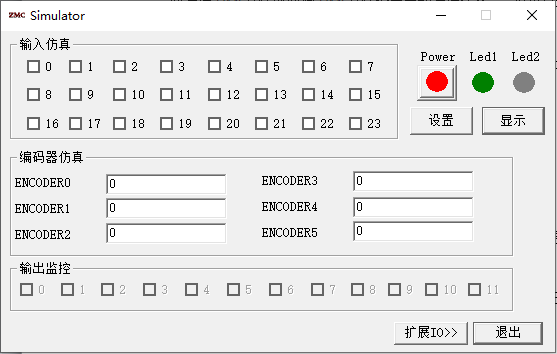
???仿真控制器
正運(yùn)動(dòng)為用戶(hù)考慮無(wú)控制器使用場(chǎng)合的情況下,使用RTSys軟件支持仿真控制器。支持在線仿真調(diào)試,通過(guò)仿真器控制器輸入口的開(kāi)關(guān)狀態(tài)及監(jiān)測(cè)輸出口狀態(tài)變化等。
???仿真組態(tài)觸摸屏
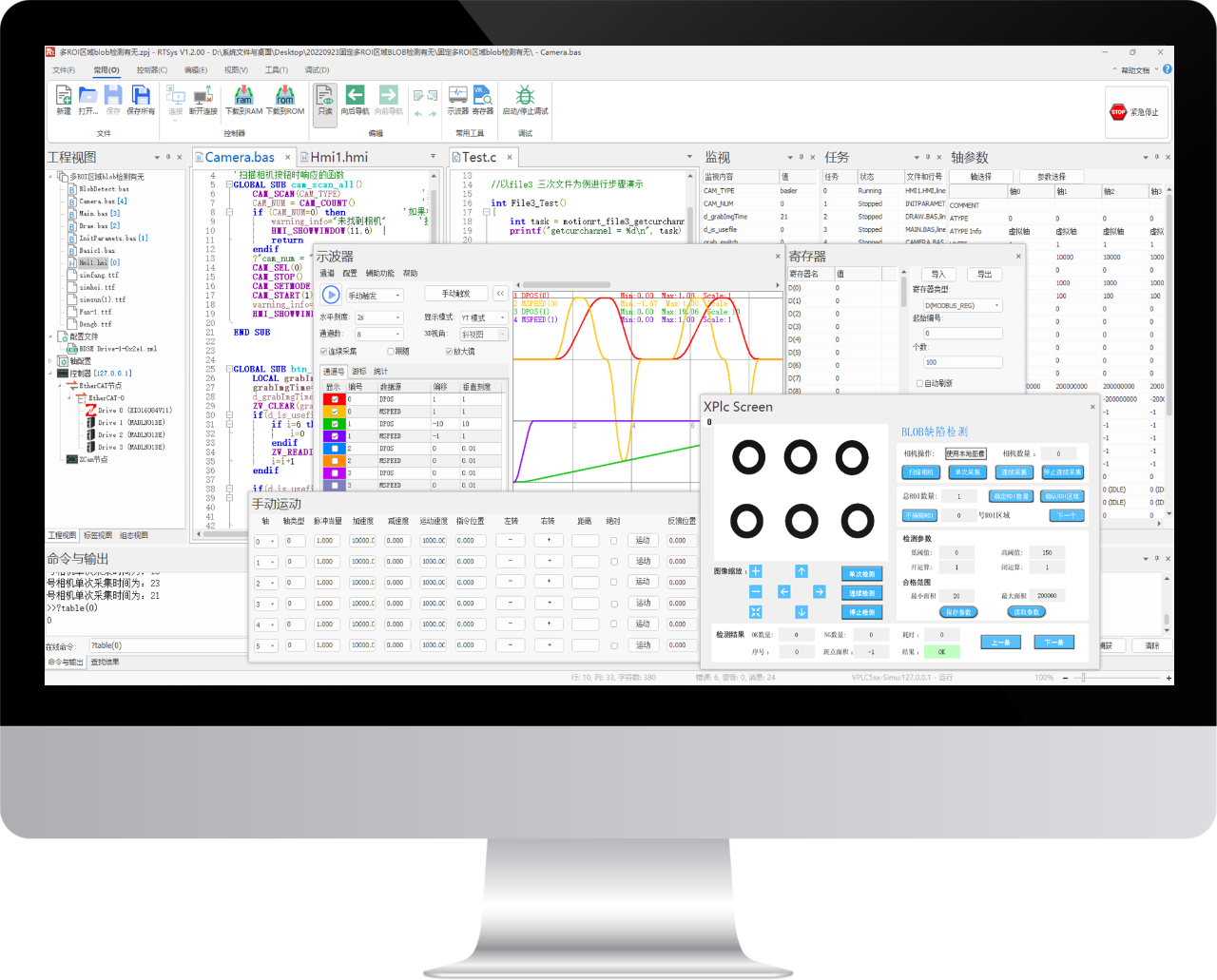
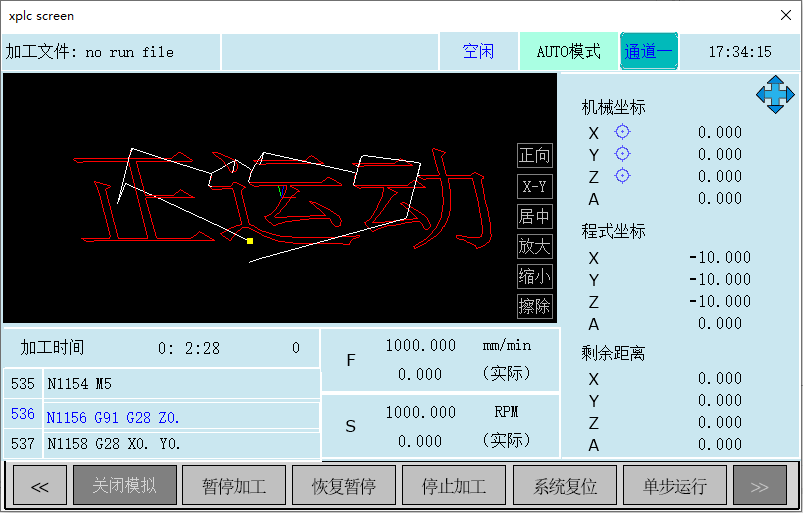
RTSys提供了xplc screen組態(tài)插件用于顯示HMI組態(tài)界面,仿真HMI組態(tài)界面有以下兩種方式:
(1)仿真器界面“顯示”按鈕功能(僅支持使用仿真器編程時(shí)顯示組態(tài)界面);通過(guò)RTSys中自帶的xplc screen工具插件,該種方式支持連接控制器或仿真器時(shí)使用。(菜單欄“工具”→“插件”→“xplc screen”)
(2)用戶(hù)可以通過(guò)HMI編程在RTSys中將界面編輯好后運(yùn)行顯示在xplc screen中,支持模擬點(diǎn)擊控件觸發(fā)效果,解決了部分由于缺少觸摸屏等外部設(shè)備時(shí)的局限性。
04 RTSys主界面布局各窗口介紹
???工程視圖/標(biāo)簽視圖/組態(tài)視圖
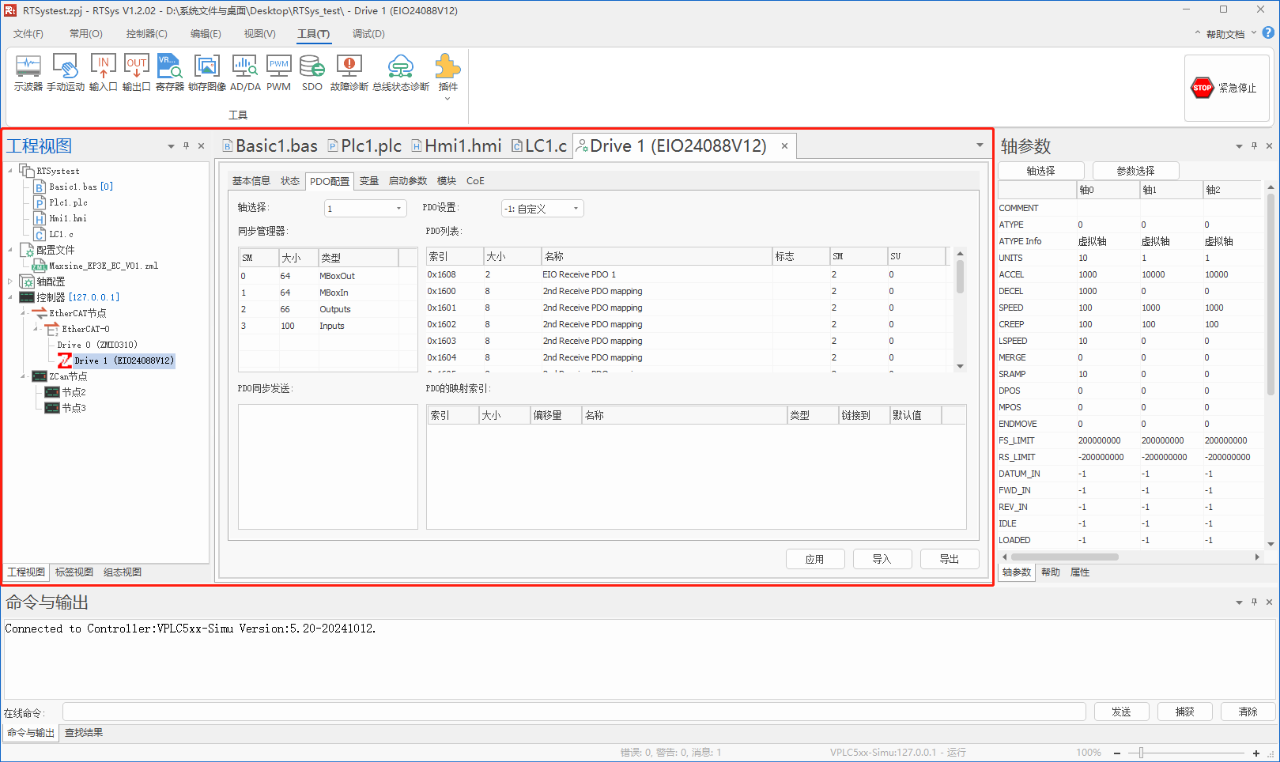
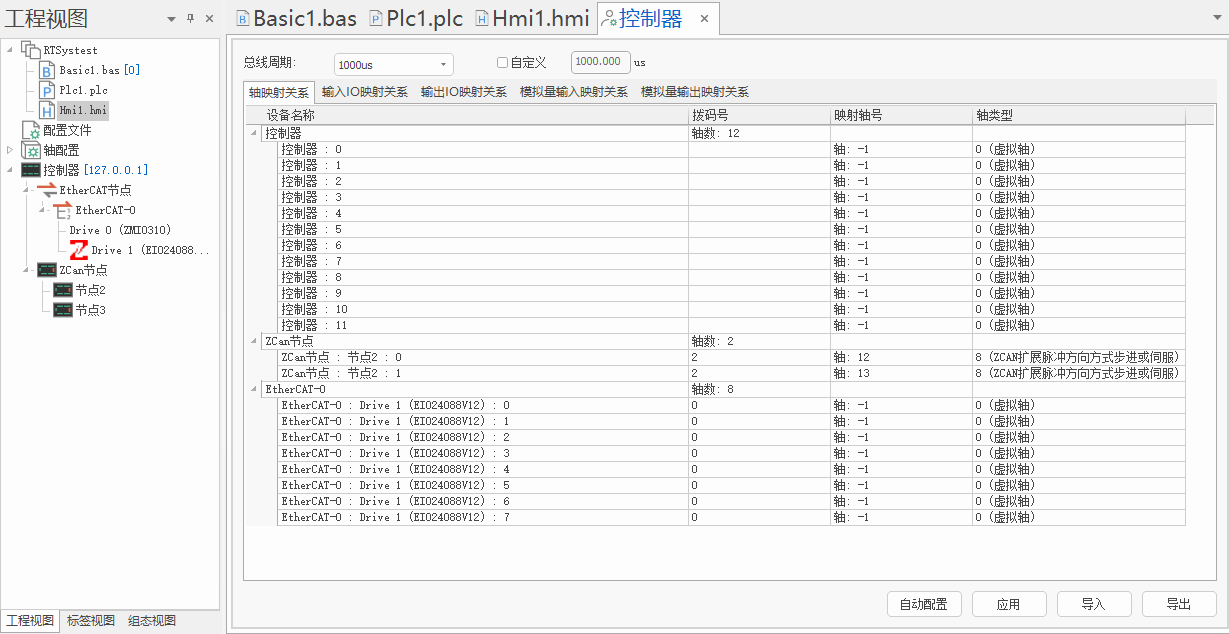
1.工程視圖:顯示查看當(dāng)前項(xiàng)目中包含的文件數(shù)量、類(lèi)型和文件的任務(wù)號(hào),同時(shí)支持添加程序文件或配置文件(.bas/.plc/.hmi/.c/.zml)。
新增:軸配置和EtherCAT總線配置功能,支持一鍵分配軸類(lèi)型、軸號(hào)等功能,對(duì)各軸進(jìn)行配置。(詳細(xì)功能操作請(qǐng)參考《RTSys使用手冊(cè)》)
2.標(biāo)簽視圖:顯示查看所有文件中含有的SUB函數(shù)列表。
3.組態(tài)視圖:顯示查看Hmi文件中含有的所有窗口及每個(gè)窗口中包含的元件。
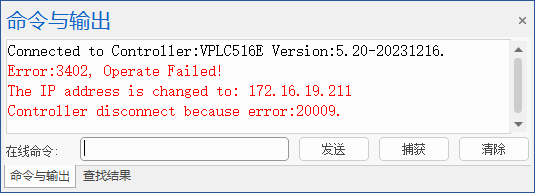
???命令與輸出
命令與輸出窗口主要用于查看程序返回信息及報(bào)錯(cuò)信息。主要有控制器的各種參數(shù)、控制軸運(yùn)動(dòng)、打印程序運(yùn)行結(jié)果、打印程序錯(cuò)誤信息等。
在線命令則用于實(shí)時(shí)發(fā)送命令并立即執(zhí)行,常見(jiàn)用于打印控制器參數(shù)(?*max / ?*set等)、打印寄存器數(shù)值、發(fā)送運(yùn)動(dòng)指令等。
打印的輸出函數(shù)有:?、PRINT、WARN、ERROR、TRACE等。
?為PRINT的簡(jiǎn)寫(xiě),WARN為警告信息,ERROR為錯(cuò)誤信息,TRACE為打印信息。
其中WARN、ERROR、TRACE等命令是否輸出由ERRSWITCH指令控制。(詳細(xì)語(yǔ)法可參考RTBasic編程手冊(cè))
執(zhí)行在線命令和打印錯(cuò)誤信息提示:
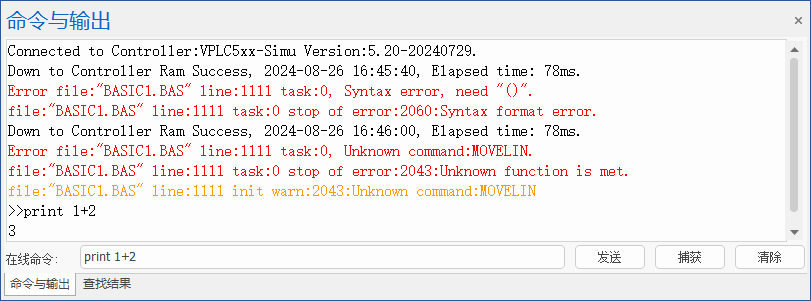
另外,該窗口還提供了“捕獲”功能,用于將該窗口中的信息內(nèi)容保存為.txt文件,便于工程師對(duì)于信息抓包分析。
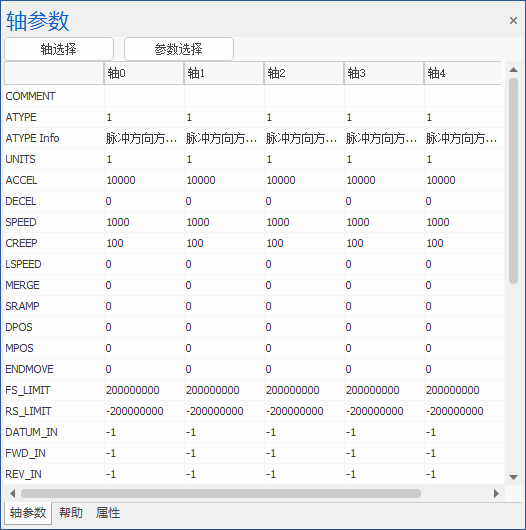
???軸參數(shù)窗口
支持監(jiān)控各軸運(yùn)動(dòng)控制中常見(jiàn)的參數(shù),運(yùn)動(dòng)過(guò)程中參數(shù)的實(shí)時(shí)變化可在該窗口查看。部分可寫(xiě)參數(shù)支持雙擊修改,只讀參數(shù)不支持修改。
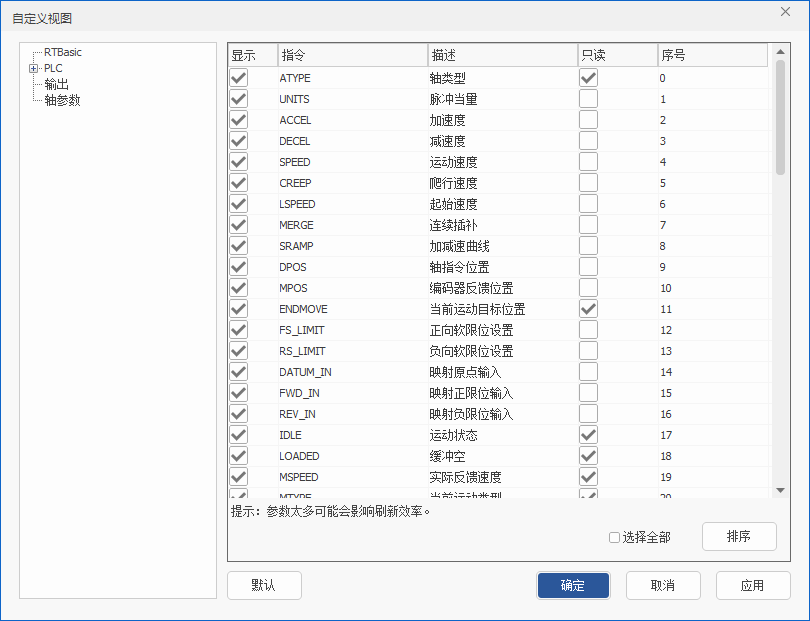
要監(jiān)控的軸號(hào)可通過(guò)“軸選擇”按鈕選擇;“參數(shù)選擇”則用于自定義選擇需要監(jiān)控顯示的軸參數(shù)。(參數(shù)指令含義參考《RTSys使用手冊(cè)》、《RTBasic編程手冊(cè)》)
05 RTSys控制器常用操作工具
??? 控制器狀態(tài)
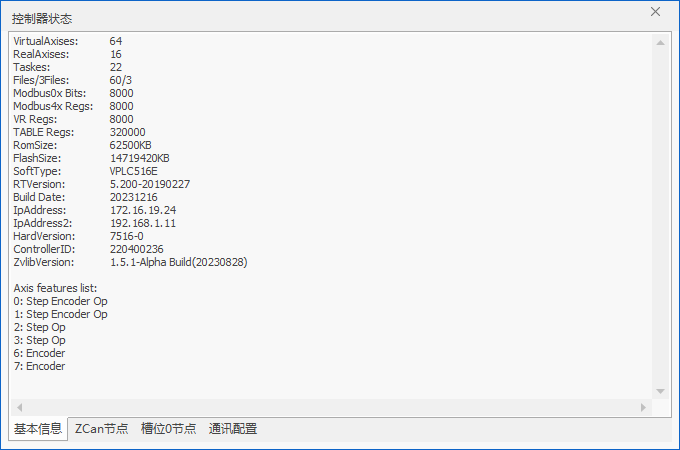
顯示當(dāng)前連接的控制器狀態(tài)信息,便于用戶(hù)隨時(shí)查看控制器相關(guān)參數(shù)信息或Zcan/EtherCAT總線節(jié)點(diǎn)狀態(tài)等。
基本信息包含:最大虛軸數(shù)、最大電機(jī)軸數(shù)、任務(wù)數(shù)、文件數(shù)量、各類(lèi)寄存器空間大小、程序容量大小、存儲(chǔ)器大小、控制器的型號(hào)、軟件版本號(hào)與時(shí)間、IP地址、硬件版本號(hào),控制器硬件ID以及各軸上可配置的類(lèi)型及映射等。
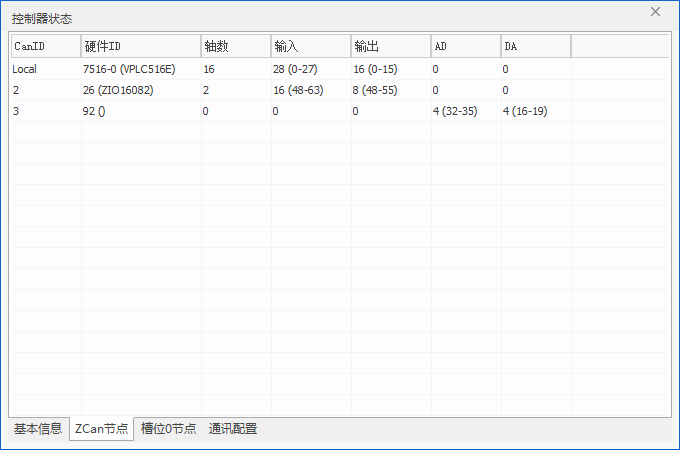
ZCAN節(jié)點(diǎn):讀取顯示can總線上的節(jié)點(diǎn)設(shè)備信息,包含:CANID、設(shè)備ID、軸數(shù)、輸入/輸出數(shù)量、模擬量輸入/輸出數(shù)量。Can總線一般用于接ZIO系列/ZMIO-CAN擴(kuò)展模塊。
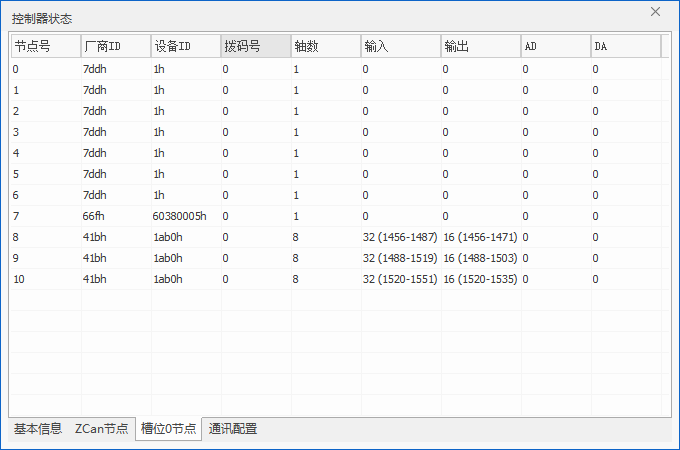
槽位0節(jié)點(diǎn):讀取顯示EtherCAT總線節(jié)點(diǎn)上的設(shè)備信息,包含:設(shè)備節(jié)點(diǎn)號(hào)、廠商/設(shè)備ID、軸數(shù)、輸入/輸出數(shù)量、模擬量輸入/輸出數(shù)量。該窗口可用于檢查控制器是否掃描到相應(yīng)數(shù)量的EtherCAT設(shè)備。
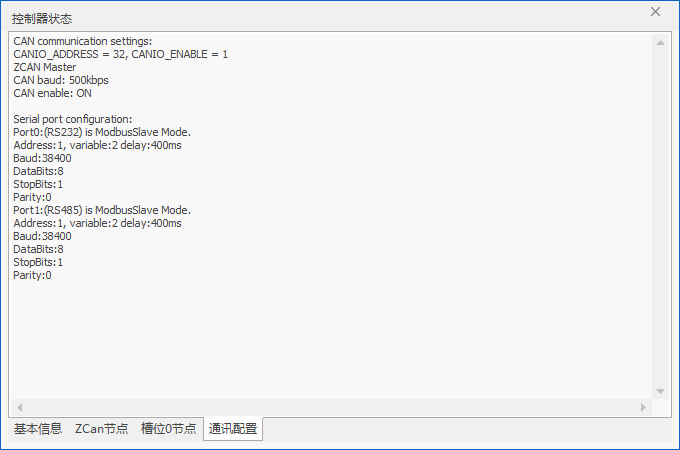
通訊配置:查看CAN通訊配置和RS232/RS485/RS422串口參數(shù)配置。
此時(shí)CAN通訊的設(shè)置:CANIO_ADDRESS = 32,CANIO_ENABLE=1
結(jié)合CANIO_ADDRESS與CANIO_ENABLE的信息可以知曉,此時(shí)控制器是ZCAN Master主站模式,CAN總線通訊速率500kbps,CAN使能狀態(tài)。
如需修改CAN通訊的設(shè)置,修改CANIO_ADDRESS與CANIO_ENABLE相關(guān)參數(shù)即可。
(1)Port0為RS232串口,ModbusSlave狀態(tài),地址1,VR與MODBUS寄存器是兩片獨(dú)立區(qū)間。
(2)Port1為RS485串口,ModbusSlave狀態(tài),地址1,VR與MODBUS寄存器是兩片獨(dú)立區(qū)間。
(3)Baud為串口波特率,DataBits為數(shù)據(jù)位,StopBits為停止位,Parity為校驗(yàn)位。
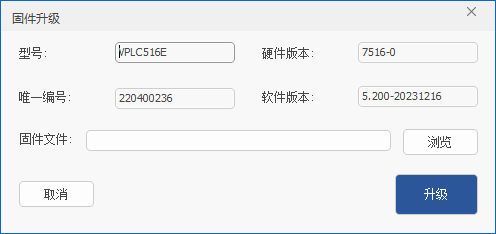
???固件升級(jí)
固件升級(jí)用于對(duì)控制器現(xiàn)有固件版本更新,當(dāng)前固件版本若無(wú)法滿(mǎn)足程序運(yùn)行要求,或部分指令功能不支持,就需要對(duì)固件進(jìn)行升級(jí)。
固件升級(jí)有兩種方法,一種是使用RTSys軟件自帶的固件升級(jí)功能,另一種是采用zfirmdown工具軟件下載zfm固件包,進(jìn)行固件升級(jí)。
先找控制器廠家獲取當(dāng)前型號(hào)的固件文件,點(diǎn)擊RTSys軟件菜單欄“控制器”→“固件升級(jí)”后,在彈出的窗口里點(diǎn)擊“瀏覽”選擇目標(biāo)固件文件進(jìn)行固件升級(jí)操作。固件升級(jí)詳細(xì)操作點(diǎn)擊→脈沖全閉環(huán)EtherCAT運(yùn)動(dòng)控制器的固件升級(jí)。
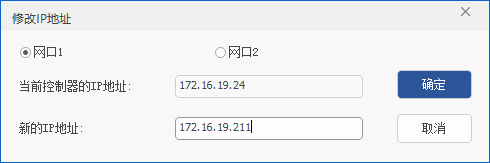
???修改IP地址
控制器出廠IP為192.168.0.11,修改控制器網(wǎng)口的IP地址可以通過(guò)IP_ADDRESS指令發(fā)送在線命令修改,或通過(guò)RTSys中“控制器”→“修改IP地址”窗口直接修改。
IP地址在連接上控制器之后修改,修改成功之后自動(dòng)斷開(kāi)連接,在線命令打印控制器連接錯(cuò)誤信息,需要選擇新IP地址再次連接控制器,修改成功后永久有效。
注意:修改的新IP地址不能超出范圍(一般范圍為xxx.xxx.xxx.1 - xxx.xxx.xxx.254),超出范圍將導(dǎo)致連接不上控制器。
還有更多好用的功能和工具將在下一篇為大家介紹!下一篇將會(huì)介紹知識(shí)產(chǎn)權(quán)保護(hù)相關(guān)工具、示波器、輸入/輸出口調(diào)試工具、手動(dòng)運(yùn)動(dòng)工具等!
???教學(xué)視頻
教學(xué)視頻可點(diǎn)擊→“RTSys發(fā)布:自主可控、簡(jiǎn)單易用的運(yùn)動(dòng)控制集成開(kāi)發(fā)平臺(tái)(上)”查看。
更多精彩且聽(tīng)下回分解!
RTSys安裝包下載地址:
https://nas.zmotion.com.cn:36888/sharing/SCa6nsPi1
RTSys免安裝版下載地址:
https://nas.zmotion.com.cn:36888/sharing/FdyG7gquh
本次,正運(yùn)動(dòng)技術(shù)RTSys發(fā)布:自主可控、簡(jiǎn)單易用的運(yùn)動(dòng)控制集成開(kāi)發(fā)平臺(tái)(上),就分享到這里。
更多精彩內(nèi)容請(qǐng)關(guān)注“正運(yùn)動(dòng)小助手”公眾號(hào),需要相關(guān)開(kāi)發(fā)環(huán)境與例程代碼,請(qǐng)咨詢(xún)正運(yùn)動(dòng)技術(shù)銷(xiāo)售工程師:400-089-8936。
本文由正運(yùn)動(dòng)技術(shù)原創(chuàng),歡迎大家轉(zhuǎn)載,共同學(xué)習(xí),一起提高中國(guó)智能制造水平。文章版權(quán)歸正運(yùn)動(dòng)技術(shù)所有,如有轉(zhuǎn)載請(qǐng)注明文章來(lái)源。
正運(yùn)動(dòng)技術(shù)專(zhuān)注于運(yùn)動(dòng)控制技術(shù)研究和通用運(yùn)動(dòng)控制軟硬件產(chǎn)品的研發(fā),是國(guó)家級(jí)高新技術(shù)企業(yè)。正運(yùn)動(dòng)技術(shù)匯集了來(lái)自華為、中興等公司的優(yōu)秀人才,在堅(jiān)持自主創(chuàng)新的同時(shí),積極聯(lián)合各大高校協(xié)同運(yùn)動(dòng)控制基礎(chǔ)技術(shù)的研究,是國(guó)內(nèi)工控領(lǐng)域發(fā)展最快的企業(yè)之一,也是國(guó)內(nèi)少有、完整掌握運(yùn)動(dòng)控制核心技術(shù)和實(shí)時(shí)工控軟件平臺(tái)技術(shù)的企業(yè)。主要業(yè)務(wù)有:運(yùn)動(dòng)控制卡_運(yùn)動(dòng)控制器_EtherCAT運(yùn)動(dòng)控制卡_EtherCAT控制器_運(yùn)動(dòng)控制系統(tǒng)_視覺(jué)控制器__運(yùn)動(dòng)控制PLC_運(yùn)動(dòng)控制_機(jī)器人控制器_視覺(jué)定位_XPCIe/XPCI系列運(yùn)動(dòng)控制卡等。
審核編輯 黃宇
-
運(yùn)動(dòng)控制
+關(guān)注
關(guān)注
4文章
581瀏覽量
32870 -
集成開(kāi)發(fā)
+關(guān)注
關(guān)注
0文章
22瀏覽量
12085
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
【正運(yùn)動(dòng)】高速高精,超高實(shí)時(shí)性的PCIe EtherCAT實(shí)時(shí)運(yùn)動(dòng)控制卡 | PCIE464
RTSys:自主自研、簡(jiǎn)單易用的運(yùn)動(dòng)控制集成開(kāi)發(fā)平臺(tái)(下) #正運(yùn)動(dòng)技術(shù) #運(yùn)動(dòng)控制器 #運(yùn)動(dòng)控制卡
LabVIEW+研華運(yùn)動(dòng)控制卡控制4軸伺服問(wèn)題
便宜易用的運(yùn)動(dòng)控制芯片與模塊的資料
正運(yùn)動(dòng)自主研發(fā)實(shí)時(shí)軟核MotionRT7與Labview單軸點(diǎn)動(dòng)例程開(kāi)發(fā)
高速移動(dòng)平臺(tái)橫向運(yùn)動(dòng)自抗擾控制
基于ADT-8948A1四軸伺服運(yùn)動(dòng)控制卡的設(shè)計(jì)及在PCB切割系統(tǒng)的應(yīng)用
消息稱(chēng)蘋(píng)果 iPhone 13 AiP 堅(jiān)持自研,未來(lái)自主開(kāi)發(fā) RF 模組
研控運(yùn)動(dòng)控制卡的編程小技巧
Windows實(shí)時(shí)運(yùn)動(dòng)控制軟核(五):LOCAL高速接口測(cè)試之VC6.0

Windows實(shí)時(shí)運(yùn)動(dòng)控制軟核(六):LOCAL高速接口測(cè)試之Matlab
正運(yùn)動(dòng)技術(shù)自主自研Windows運(yùn)動(dòng)控制實(shí)時(shí)軟核MotionRT7入選“十大工業(yè)技術(shù)創(chuàng)新獎(jiǎng)”
EtherCAT運(yùn)動(dòng)控制:RTSys對(duì)控制器的監(jiān)控與設(shè)置原理

EtherCAT超高速實(shí)時(shí)運(yùn)動(dòng)控制卡XPCIE1032H上位機(jī)C#開(kāi)發(fā)(五):通過(guò)RTSys進(jìn)行調(diào)試與診斷

RTSys:自主自研、簡(jiǎn)單易用的運(yùn)動(dòng)控制集成開(kāi)發(fā)平臺(tái)(下)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論